Instalação do ROS2 Humble
ROS 2 é um middleware de robótica open-source de próxima geração, projetado para construir sistemas robóticos em tempo real, confiáveis e escaláveis. Este wiki demonstrará o processo detalhado de instalação do ROS 2 usando o Jetson como exemplo.
- JP5.1.2
- JP6.2
Definir localidade (Locale)
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
Instalar dependências
sudo apt update && sudo apt install gnupg wget
sudo apt install software-properties-common
sudo add-apt-repository universe
Inicializar fontes (Escolha uma região)
# US Region
echo 'deb https://isaac.download.nvidia.com/isaac-ros/ubuntu/main focal main' | sudo tee -a /etc/apt/sources.list
# China Region
echo 'deb https://isaac.download.nvidia.cn/isaac-ros/ubuntu/main focal main' | sudo tee -a /etc/apt/sources.list
Adicionar repositório APT do ROS 2
sudo apt update && sudo apt install curl -y \
&& sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
Instalar ROS2
sudo apt update
sudo apt install ros-humble-desktop-full # Options: ros-humble-desktop-full, ros-humble-desktop, or ros-humble-ros-base
Instalar ferramentas de build adicionais
sudo apt install ros-dev-tools
Inicializar ambiente do ROS
sudo rosdep init
rosdep update
Configurar variáveis de ambiente do ROS
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
No dispositivo Jetson, abra um terminal e insira o seguinte comando:
sudo apt install software-properties-common -y
sudo add-apt-repository universe
sudo apt update
sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
sudo apt install ros-humble-desktop -y
Para verificar se o ROS2 foi instalado com sucesso, podemos criar dois novos terminais no dispositivo e executar os seguintes comandos, respectivamente.
# terminal1
ros2 run demo_nodes_cpp talker
# terminal2
ros2 run demo_nodes_py listener
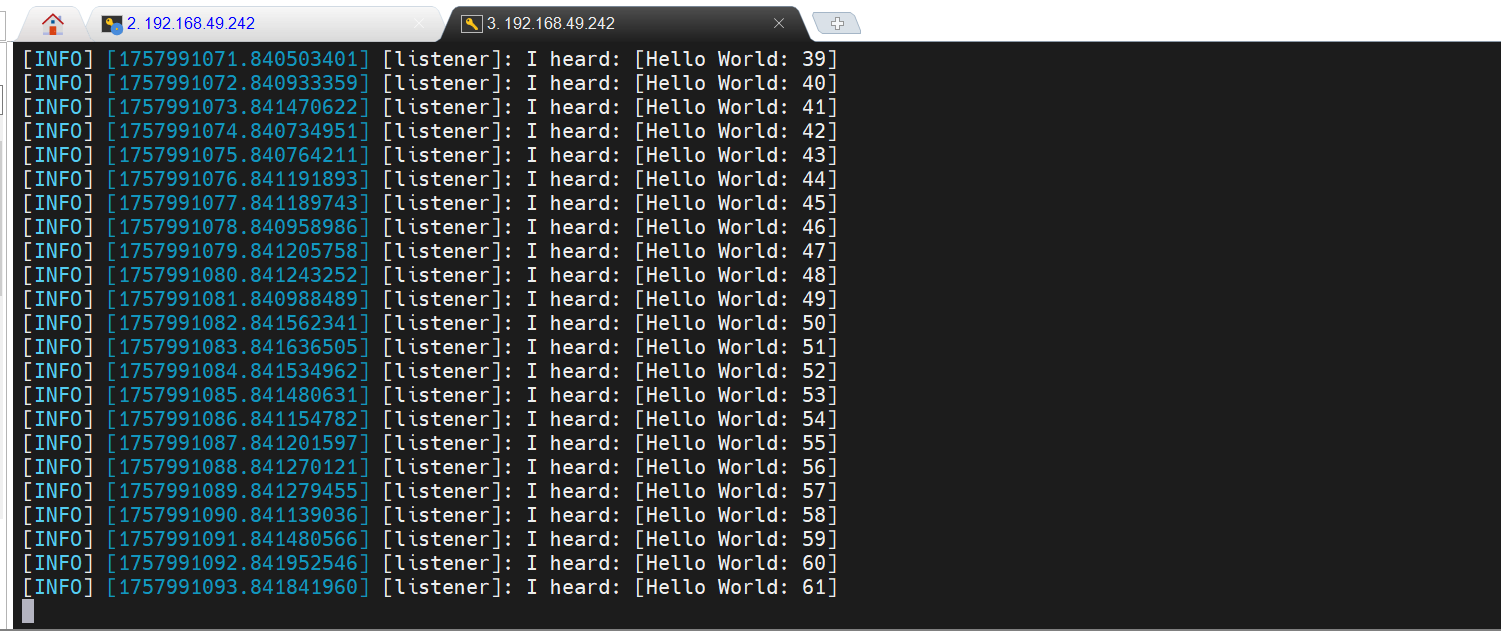
Se ambos os terminais imprimirem as mensagens, isso significa que o ROS 2 Humble foi instalado com sucesso! 🎉
Suporte Técnico & Discussão sobre Produtos
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.