Isaac ROS AprilTag
Pré-requisitos
Antes de implantar o AprilTag, certifique-se de que o ambiente básico do Isaac ROS foi configurado com sucesso no seu reComputer Guia de Instalação. Se o ROS2 não estiver instalado, consulte este documento.
Tópicos do Pacote Isaac ROS AprilTag
Tópicos Assinados:
| Tópico ROS | Interface | Descrição |
|---|---|---|
| image | sensor_msgs/Image | Fluxo de entrada da câmera. |
| camera_info | sensor_msgs/CameraInfo | Fluxo de entrada de intrínsecos da câmera. |
Tópicos Publicados:
| Tópico ROS | Tipo | Descrição |
|---|---|---|
| tag_detections | isaac_ros_apriltag_interfaces/AprilTagDetectionArray | Array de mensagens de detecção de AprilTag. |
| tf | tf2_msgs/TFMessage | Poses dos AprilTags detectados (TagFamily:ID) em relação ao frame_id da câmera. |
1. Configuração do Ambiente Isaac ROS AprilTag
Criar Workspace (Pule se já tiver feito)
mkdir -p ~/workspaces/isaac_ros-dev/src
echo "export ISAAC_ROS_WS=${HOME}/workspaces/isaac_ros-dev/" >> ~/.bashrc
source ~/.bashrc
Clonar Pacotes e Dados de ROS Bag
cd ${ISAAC_ROS_WS}/src
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_apriltag.git
cd ${ISAAC_ROS_WS}/src/isaac_ros_apriltag && \
git lfs pull -X "" -I "resources/rosbags/quickstart.bag"
Entrar no Container Docker
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
2. Testando com Dados de ROS Bag
Instalar Pacote AprilTag (Dentro do Docker)
sudo apt-get install -y ros-humble-isaac-ros-apriltag
Iniciar Nó AprilTag
ros2 launch isaac_ros_apriltag isaac_ros_apriltag.launch.py
Abrir Novo Terminal (Dentro do Docker)
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
Reproduzir ROS Bag
ros2 bag play --loop src/isaac_ros_apriltag/resources/rosbags/quickstart.bag
Visualizar no RViz2
Abra o RViz2 em um terminal local e adicione os componentes Image e TF:
ros2 run rviz2 rviz2

3. Testando com Câmera USB
Certifique-se de que o ROS2 está instalado localmente.
Criar Workspace para Câmera USB
cd ~/
mkdir -p usbcam/src
cd usbcam/src
Clonar e Compilar Pacote usb_cam
git clone https://github.com/ros-drivers/usb_cam.git
cd ..
colcon build
echo "source ~/usbcam/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
Verificar Formato da Câmera
Conecte a câmera e verifique o caminho do dispositivo (por exemplo, /dev/video*). Teste com:
cd ~/usbcam
ros2 run usb_cam usb_cam_node_exe

Formatos de Pixel Suportados:
rgb8, yuyv, yuyv2rgb, uyvy, uyvy2rgb, m4202rgb, mono8, mono16, y102mono8, raw_mjpeg
Configurar Câmera
- Modifique
pixel_formatem/usbcam/src/usb_cam/config/params_1.yaml.
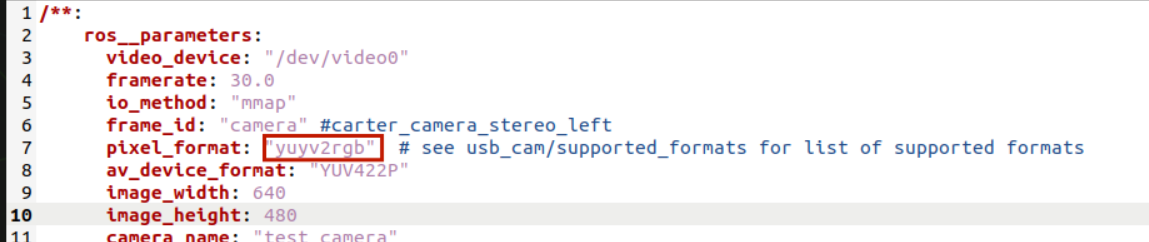
- Ajuste o
frame_id(padrão:camera). - Faça o remapeamento dos nomes dos tópicos em
/usbcam/src/usb_cam/launch/camera_config.py(linhas 58 e 62) para corresponder aos requisitos do AprilTag (/imagee/camera_info).

Recompilar e Iniciar Câmera
cd ~/usbcam
colcon build
ros2 launch usb_cam camera.launch.py
Executar Nó AprilTag (Dentro do Docker)
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
ros2 launch isaac_ros_apriltag isaac_ros_apriltag.launch.py
Visualizar no RViz2
Defina Fixed Frame para o frame_id da câmera, adicione um componente Image inscrito em /image e ative TF.
Observação: Este teste utiliza um AprilTag de 200 mm × 200 mm.

Suporte Técnico e Discussão de Produtos
Obrigado por escolher nossos produtos! Estamos aqui para oferecer diferentes formas de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.