Começando com o braço robótico StarAI com LeRobot
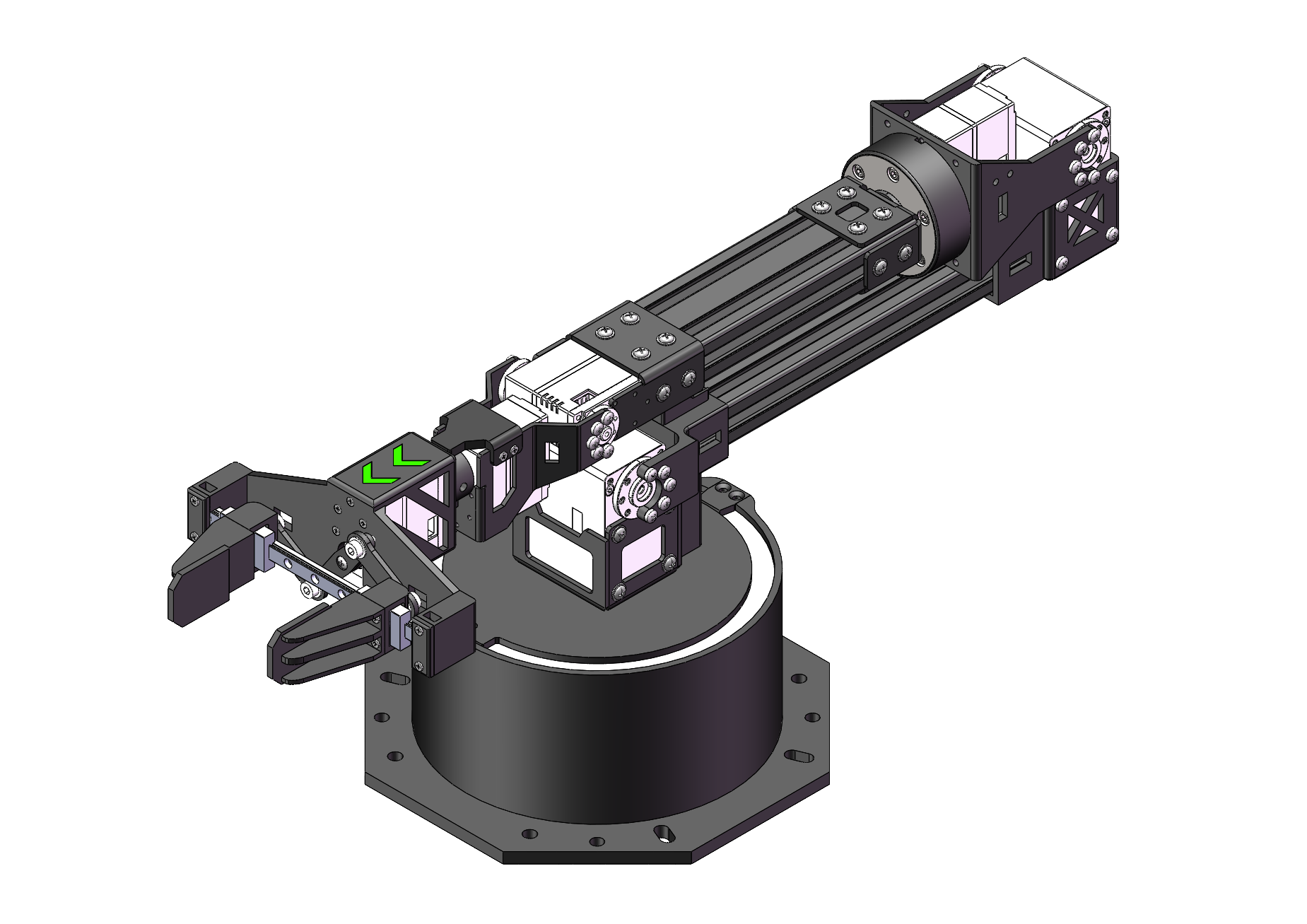
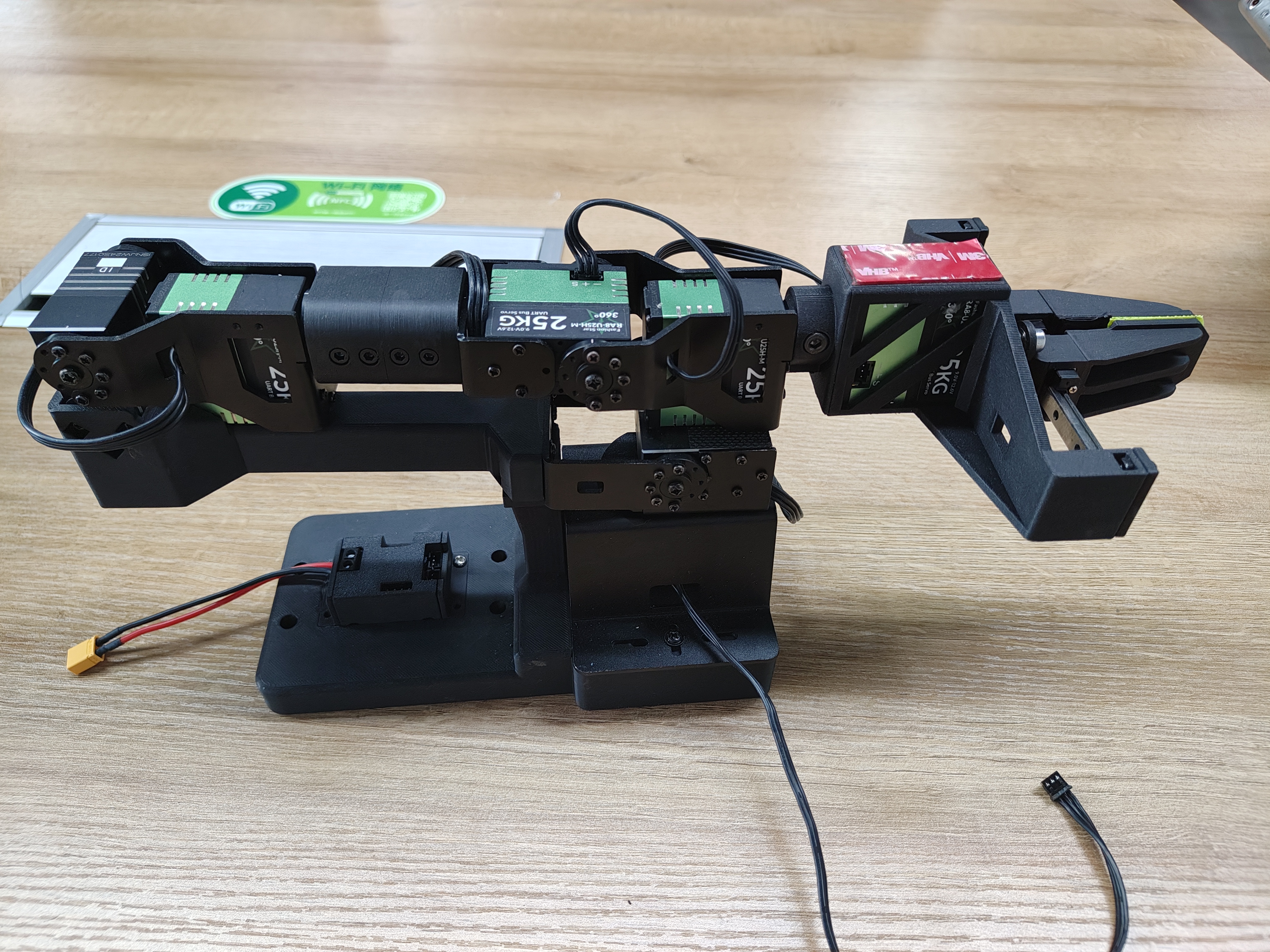
| Seguidor Viola | Líder Violino | Seguidor Violoncelo |
|---|---|---|
 |  |  |
Introdução aos Produtos
- Open-Source e Amigável para Desenvolvedores É uma solução de braço robótico 6+1 DOF open-source e amigável para desenvolvedores da Fishion Star Technology Limited.
- Integração com LeRobot Projetado para integração com a Plataforma LeRobot , que fornece modelos PyTorch, conjuntos de dados e ferramentas para aprendizado por imitação em tarefas robóticas do mundo real — incluindo coleta de dados, simulação, treinamento e implantação.
- Recursos Abrangentes de Aprendizagem Fornece recursos abrangentes de aprendizado open-source, como guias de montagem e calibração e exemplos de tarefas personalizadas de preensão para ajudar os usuários a começar rapidamente e desenvolver aplicações robóticas.
- Compatível com Nvidia Suporta implantação na plataforma reComputer Mini J4012 Orin NX 16GB.
Principais Recursos
- Pronto para Uso — Nenhuma Montagem Necessária. Basta Tirar da Caixa e Mergulhar no Mundo da IA.
- 6+1 Graus de Liberdade e Alcance de 470 mm — Projetado para Versatilidade e Precisão.
- Alimentado por Servos de Barramento Brushless Duplos — Suave, Silencioso e Potente com até 300 g de Carga Útil.
- Garra Paralela com Abertura Máxima de 66 mm — Pontas de Dedo Modulares para Flexibilidade de Substituição Rápida.
- Tecnologia Exclusiva Hover Lock — Congele Instantaneamente o Braço Líder em Qualquer Posição com Um Único Toque.
Especificações

| Item | Braço Seguidor | Viola | Braço Líder |Violin | Braço Seguidor |Cello |
|---|---|---|---|
| Degrees of Freedom | 6+1 | 6+1 | 6+1 |
| Reach | 470mm | 470mm | 670mm |
| Repeatability | 2mm | - | 2mm |
| Working Payload | 300g (with 70% Reach) | - | 750g (with 70% Reach) |
| Servos | RX8-U50H-M x2 RA8-U25H-M x4 RA8-U26H-M x1 | RX8-U50H-M x2 RA8-U25H-M x4 RA8-U26H-M x1 | RX18-U100H-M x3 RX8-U50H-M x3 RX8-U51H-M x1 |
| Parallel Gripper Ki | ✅ | - | ✅ |
| Wrist Rotate | Yes | Yes | Yes |
| Hold at any Position | Yes | Yes (with handle button) | Yes |
| Wrist Camera Mount | Provides reference 3D printing files | Provides reference 3D printing files | |
| Works with LeRobot | ✅ | ✅ | ✅ |
| Works with ROS 2 | ✅ | ✅ | ✅ |
| Works with MoveIt2 | ✅ | ✅ | ✅ |
| Works with Gazebo | ✅ | ✅ | ✅ |
| Communication Hub | UC-01 | UC-01 | UC-01 |
| Power Supply | 12V10A/120w XT30 | 12V10A/120w XT30 | 12V25A/300w XT60 |
Para mais informações sobre motores de servo, visite o seguinte link.
Configuração inicial do ambiente
Para Ubuntu x86:
- Ubuntu 22.04
- CUDA 12+
- Python 3.10
- Torch 2.6
Para Jetson Orin:
- Jetson JetPack 6.0+
- Python 3.10
- Torch 2.6
Instalação e Depuração
Instalar LeRobot
Ambientes como pytorch e torchvision precisam ser instalados com base na sua versão do CUDA.
- Instale o Miniconda: Para Jetson:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
Ou, para Ubuntu 22.04 x86:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
source ~/miniconda3/bin/activate
conda init --all
- Crie e ative um novo ambiente conda para o lerobot
conda create -y -n lerobot python=3.10 && conda activate lerobot
- Clone o Lerobot:
git clone https://github.com/Seeed-Projects/lerobot.git ~/lerobot
- Ao usar o miniconda, instale o ffmpeg no seu ambiente:
conda install ffmpeg -c conda-forge
Isso geralmente instala o ffmpeg 7.X para a sua plataforma, compilado com o codificador libsvtav1. Se o libsvtav1 não for suportado (verifique os codificadores suportados com ffmpeg -encoders), você pode:
- [Em qualquer plataforma] Instalar explicitamente o ffmpeg 7.X usando:
conda install ffmpeg=7.1.1 -c conda-forge
- [Somente no Linux] Instalar as dependências de compilação do ffmpeg e compilar o ffmpeg a partir do código-fonte com libsvtav1, certificando-se de usar o binário ffmpeg correspondente à sua instalação com which ffmpeg.
- Instale o LeRobot:
cd ~/lerobot && pip install -e .
sudo apt remove brltty
Para dispositivos Jetson Jetpack (certifique-se de instalar o Pytorch-gpu e Torchvision a partir da etapa 5 antes de executar esta etapa):
conda install -y -c conda-forge "opencv>=4.10.0.84" # Install OpenCV and other dependencies through conda, this step is only for Jetson Jetpack 6.0+
conda remove opencv # Uninstall OpenCV
pip3 install opencv-python==4.10.0.84 # Then install opencv-python via pip3
conda install -y -c conda-forge ffmpeg
conda uninstall numpy
pip3 install numpy==1.26.0 # This should match torchvision
6.Instale as Dependências do Motor Fashionstar:
pip install lerobot_teleoperator_bimanual_leader
pip install lerobot_robot_bimanual_follower
- Verifique o Pytorch e o Torchvision
Como instalar o ambiente lerobot via pip desinstalará o Pytorch e o Torchvision originais e instalará as versões de CPU do Pytorch e Torchvision, você precisa realizar uma verificação no Python.
import torch
print(torch.cuda.is_available())
Se o resultado impresso for False, você precisa reinstalar o Pytorch e o Torchvision de acordo com o tutorial do site oficial.
Se você estiver usando um dispositivo Jetson, instale o Pytorch e o Torchvision de acordo com este tutorial.
Desembalando o Braço Robótico
O Kit do Braço Robótico Inclui
- Braço líder
- Braço seguidor
- Controlador (manete)
- Garra paralela
- Ferramentas de instalação (parafusos, chave sextavada)
- Morsa em C ×2
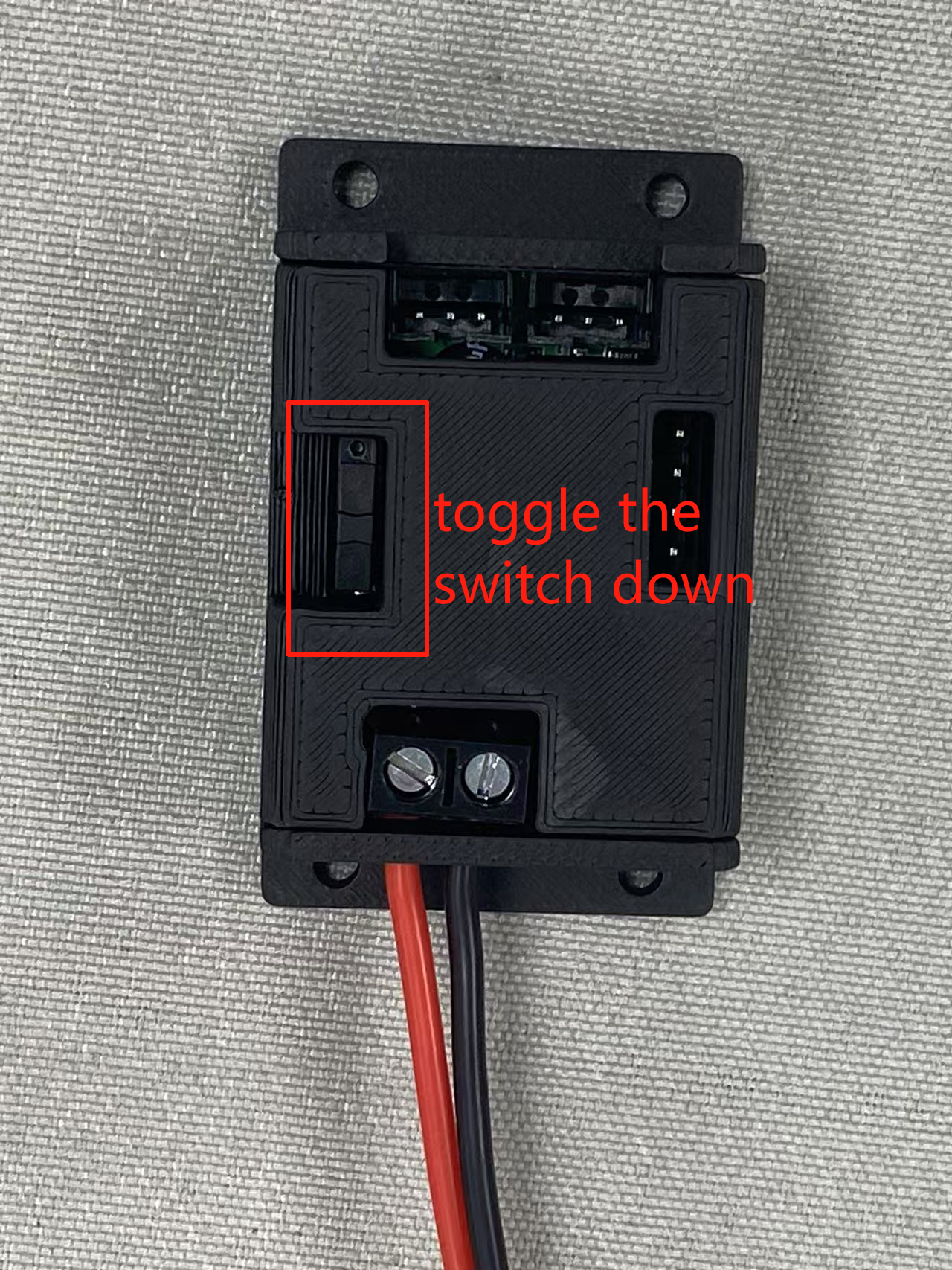
- Placa de depuração UC-01 ×2
Interruptor da placa de depuração UC-01:
Configurar Porta do Braço
Entre no diretório ~/lerobot:
cd ~/lerobot
Execute o seguinte comando no terminal para encontrar as portas USB associadas aos seus braços:
lerobot-find-port
Lembre-se de remover o USB, caso contrário a interface não será detectada.
Por exemplo:
- Exemplo de saída ao identificar a porta do braço líder (por exemplo,
/dev/tty.usbmodem575E0031751no Mac, ou possivelmente/dev/ttyUSB0no Linux): - Exemplo de saída ao identificar a porta do braço seguidor (por exemplo,
/dev/tty.usbmodem575E0032081no Mac, ou possivelmente/dev/ttyUSB1no Linux):
Se a porta serial ttyUSB0 não puder ser identificada, tente as seguintes soluções:
Liste todas as portas USB.
lsusb

Depois de identificada, verifique as informações da ttyusb.
sudo dmesg | grep ttyUSB

A última linha indica uma desconexão porque o brltty está ocupando a USB. Remover o brltty resolverá o problema.
sudo apt remove brltty

Por fim, use o comando chmod.
sudo chmod 777 /dev/ttyUSB*
Talvez seja necessário conceder acesso às portas USB executando:
sudo chmod 666 /dev/ttyUSB*
Calibrar
Para vídeos que cobrem o Braço Robótico StarAI desde o unboxing até a teleoperação, você pode consultar:
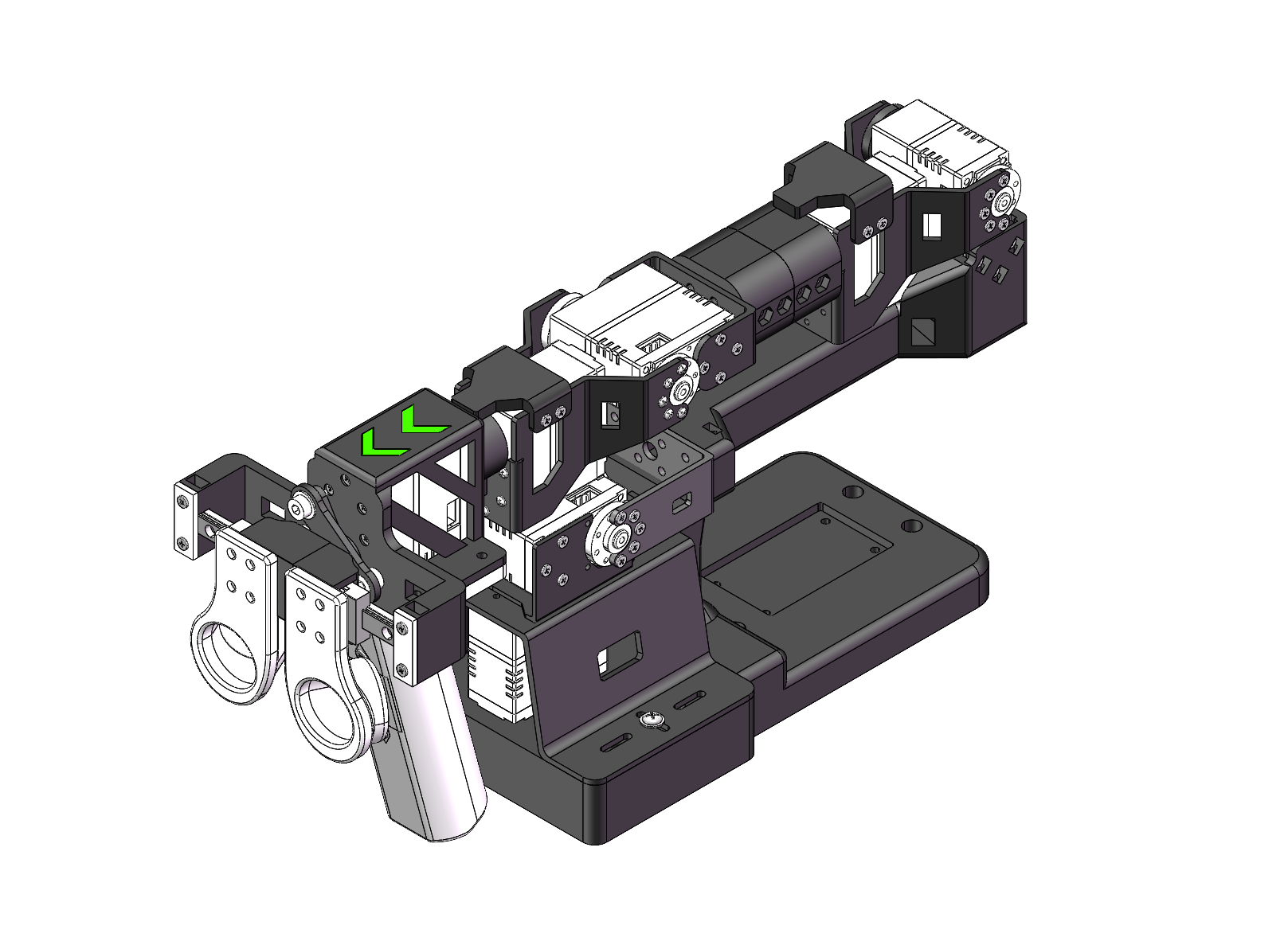
Mova o braço robótico para a posição inicial do braço robótico (conforme mostrado na figura abaixo) e coloque-o em modo de espera, depois reconecte a fonte de alimentação.
Para a posição inicial da nova versão do braço robótico, é preciso dar atenção especial para garantir que os servos das Juntas 3, 4 e 5 estejam rigorosamente alinhados com as posições da figura.
| Novo Braço Líder de Violino | Antigo Braço Líder de Violino | Braço Seguidor de Viola | Braço Seguidor de Violoncelo |
|---|---|---|---|
 | 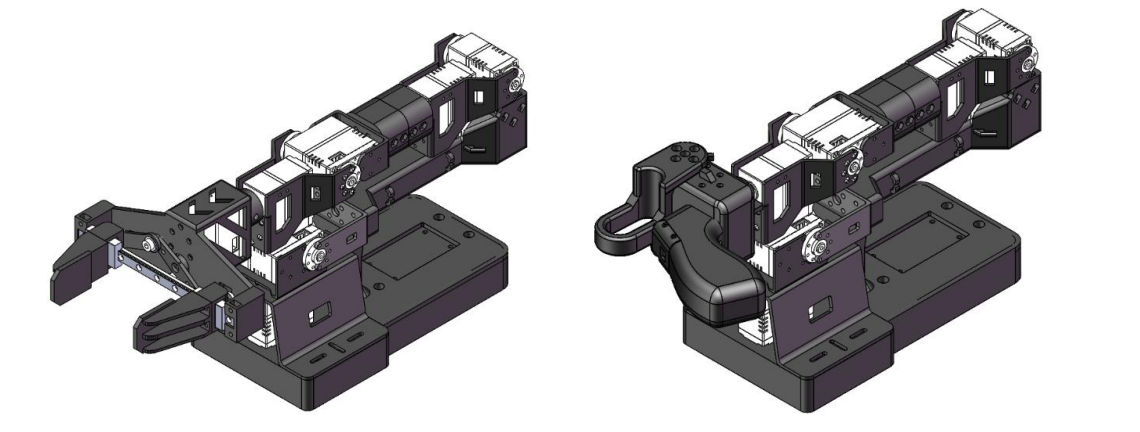 | 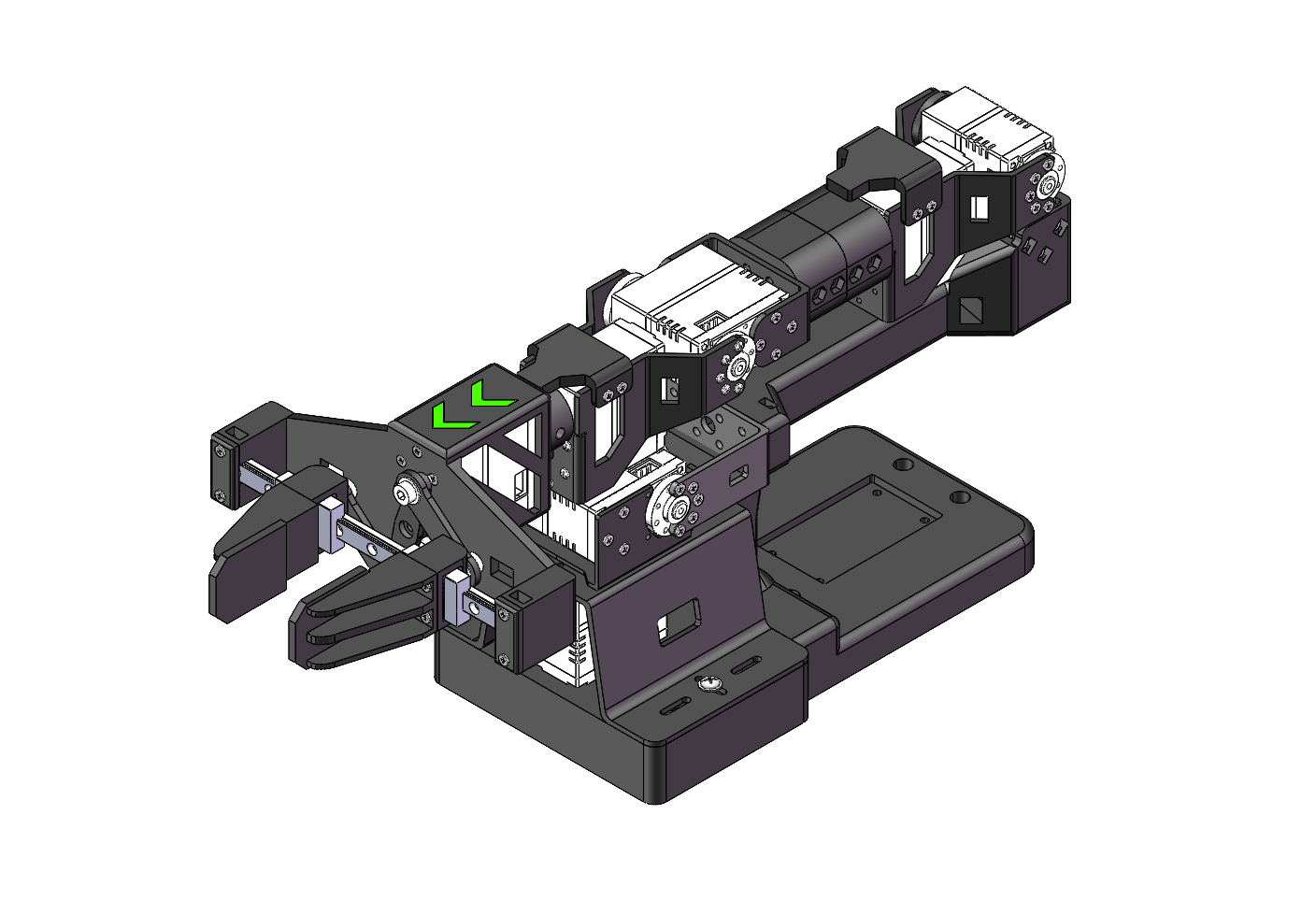 |  |
Por exemplo:
| Braço Líder de Violino | Braço Seguidor de Viola |
|---|---|
 |  |
Tomando PC (Linux) e placa Jetson como exemplos, o primeiro dispositivo USB inserido será mapeado para ttyUSB0, e o segundo dispositivo USB inserido será mapeado para ttyUSB1.
Antes de executar o código, preste atenção às interfaces de mapeamento do líder e do seguidor.
Braço Robótico Líder
Conecte o líder a /dev/ttyUSB0, ou modifique o parâmetro --teleop.port e depois execute:
lerobot-calibrate --teleop.type=lerobot_teleoperator_violin --teleop.port=/dev/ttyUSB0 --teleop.id=my_awesome_staraiviolin_arm
Após a inicialização, você verá os valores dos encoders de cada junta. Você precisa calibrar manualmente cada junta uma por uma: gire cada junta até suas posições máximas e mínimas. Para juntas sem batentes de limite, o intervalo de rotação não deve exceder 180° no sentido horário ou 180° no sentido anti-horário. Após calibrar todas as juntas, pressione Enter para salvar as configurações.
Braço Robótico Seguidor
Conecte o seguidor a /dev/ttyUSB1, ou modifique o parâmetro --teleop.port e depois execute:
Viola:
lerobot-calibrate --robot.type=lerobot_robot_viola --robot.port=/dev/ttyUSB1 --robot.id=my_awesome_staraiviola_arm
Violoncelo:
lerobot-calibrate --robot.type=lerobot_robot_cello --robot.port=/dev/ttyUSB1 --robot.id=my_awesome_staraicello_arm
Após a inicialização, você verá os valores dos encoders de cada junta. Você precisa calibrar manualmente cada junta uma por uma: gire cada junta até suas posições máximas e mínimas. Para juntas sem batentes de limite, o intervalo de rotação não deve exceder 180° no sentido horário ou 180° no sentido anti-horário. Após calibrar todas as juntas, pressione Enter para salvar as configurações.
Os arquivos de calibração serão salvos nos seguintes caminhos: ~/.cache/huggingface/lerobot/calibration/robots e ~/.cache/huggingface/lerobot/calibration/teleoperators.
Configuração de Calibração de Dois Braços
Tutorial
Braço Robótico Líder
Conecte left_arm_port a /dev/ttyUSB0 e right_arm_port a /dev/ttyUSB2, ou modifique os parâmetros --teleop.left_arm_port e --teleop.right_arm_port, e depois execute:
lerobot-calibrate --teleop.type=lerobot_teleoperator_bimanual_leader --teleop.left_arm_port=/dev/ttyUSB0 --teleop.right_arm_port=/dev/ttyUSB2 --teleop.id=bi_starai_violin_leader
Após a inicialização, você verá os valores dos encoders de cada junta. Você precisa calibrar manualmente cada junta uma por uma: gire cada junta até suas posições máximas e mínimas. Para juntas sem batentes de limite, o intervalo de rotação não deve exceder 180° no sentido horário ou 180° no sentido anti-horário. Após calibrar todas as juntas, pressione Enter para salvar as configurações.
Braço Robótico Seguidor
Conecte left_arm_port a /dev/ttyUSB1 e right_arm_port a /dev/ttyUSB3, ou modifique os parâmetros --robot.left_arm_port e --robot.right_arm_port, e depois execute:
Vioa:
lerobot-calibrate --robot.type=lerobot_robot_bimanual_follower --robot.arm_name=starai_viola --robot.left_arm_port=/dev/ttyUSB1 --robot.right_arm_port=/dev/ttyUSB3 --robot.id=bi_starai_viola_follower
Violoncelo:
lerobot-calibrate --robot.type=lerobot_robot_bimanual_follower --robot.arm_name=starai_cello --robot.left_arm_port=/dev/ttyUSB1 --robot.right_arm_port=/dev/ttyUSB3 --robot.id=bi_starai_cello_follower
Após a inicialização, você verá os valores dos encoders de cada junta. Você precisa calibrar manualmente cada junta uma por uma: gire cada junta até suas posições máximas e mínimas. Para juntas sem batentes de limite, o intervalo de rotação não deve exceder 180° no sentido horário ou 180° no sentido anti-horário. Após calibrar todas as juntas, pressione Enter para salvar as configurações.
A diferença entre configurações de braço único e de dois braços está nos parâmetros --teleop.type e --robot.type. Além disso, configurações de dois braços exigem portas USB separadas para os braços esquerdo e direito, totalizando quatro portas USB: --teleop.left_arm_port, --teleop.right_arm_port, --robot.left_arm_port e --robot.right_arm_port.
Se estiver usando uma configuração de dois braços, você precisa modificar manualmente os tipos de arquivo do braço robótico --teleop.type e --robot.type, bem como as portas USB --teleop.left_arm_port, --teleop.right_arm_port, --robot.left_arm_port e --robot.right_arm_port, para se adaptar aos comandos de teleoperação, coleta de dados, treinamento e avaliação.
Teleoperar
Mova o braço para a posição mostrada no diagrama e coloque-o em espera.
| Braço Líder de Violino | Braço Seguidor de Viola |
|---|---|
| |
Então você está pronto para teleoperar seu robô (Ele não exibirá as câmeras)! Execute este script simples:
Violino&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm
Violino&Violoncelo:
lerobot-teleoperate \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm
Dois Braços
Violino&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader
Violino&Violoncelo:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader
O comando de operação remota detectará automaticamente os seguintes parâmetros:
- Identificar quaisquer calibrações ausentes e iniciar o procedimento de calibração.
- Conectar o robô e o dispositivo de operação remota e iniciar a operação remota.
Após o início do programa, a Tecnologia Hover Lock permanece funcional.
Adicionar câmeras
Se estiver usando a Câmera de Profundidade Orbbec Gemini2

- 🚀 Etapa 1: Instalar o ambiente de dependências do Orbbec SDK
-
Clone o repositório
pyorbbeccd ~/
git clone https://github.com/orbbec/pyorbbecsdk.git -
Baixe e instale o arquivo .whl correspondente ao SDK
Vá para pyorbbecsdk Releases,
selecione e instale com base na sua versão do Python. Por exemplo:pip install pyorbbecsdk-x.x.x-cp310-cp310-linux_x86_64.whl -
Instale as dependências no diretório
pyorbbeccd ~/pyorbbecsdk
pip install -r requirements.txtForçar downgrade da versão do
numpypara1.26.0pip install numpy==1.26.0
Mensagens de erro em vermelho podem ser ignoradas.
- Clone o Orbbec SDK no diretório
~/lerobot/src/cameras
cd ~/lerobot/src/cameras
git clone https://github.com/ZhuYaoHui1998/orbbec.git
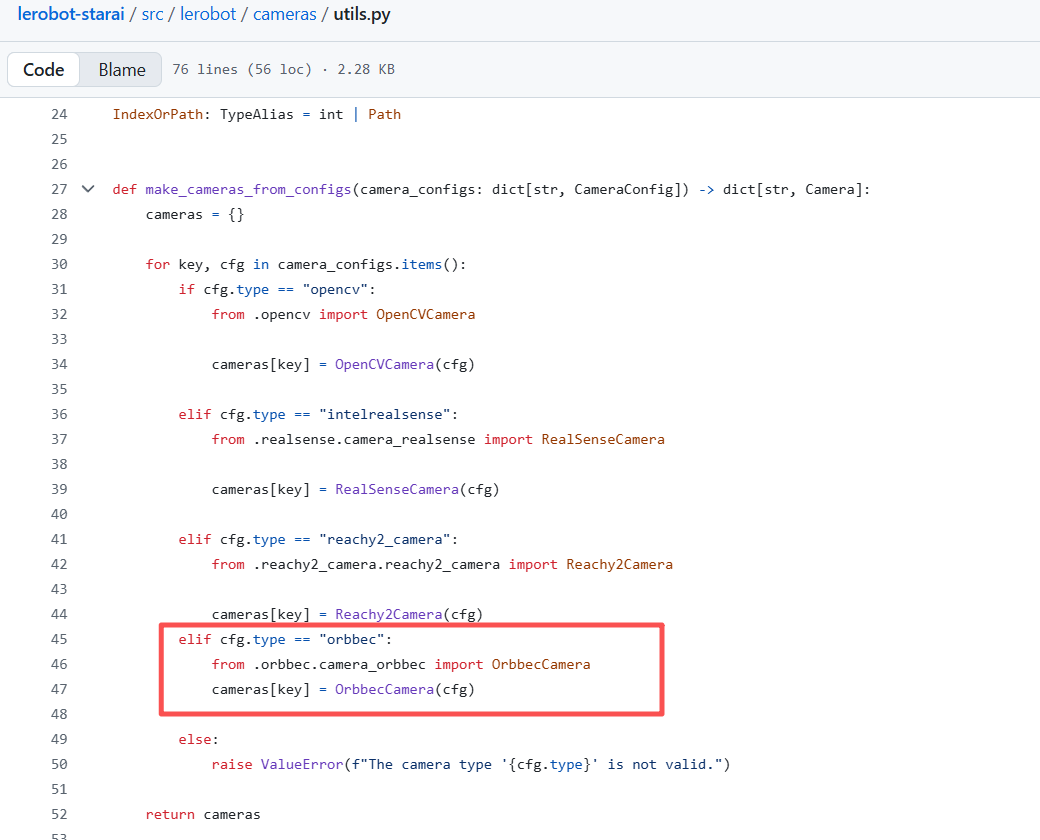
- Modifique utils.py e init.py
- Encontre
utils.pyno diretório~/lerobot/src/lerobot/camerase adicione o seguinte código na linha 40:
elif cfg.type == "orbbec":
from .orbbec.camera_orbbec import OrbbecCamera
cameras[key] = OrbbecCamera(cfg)
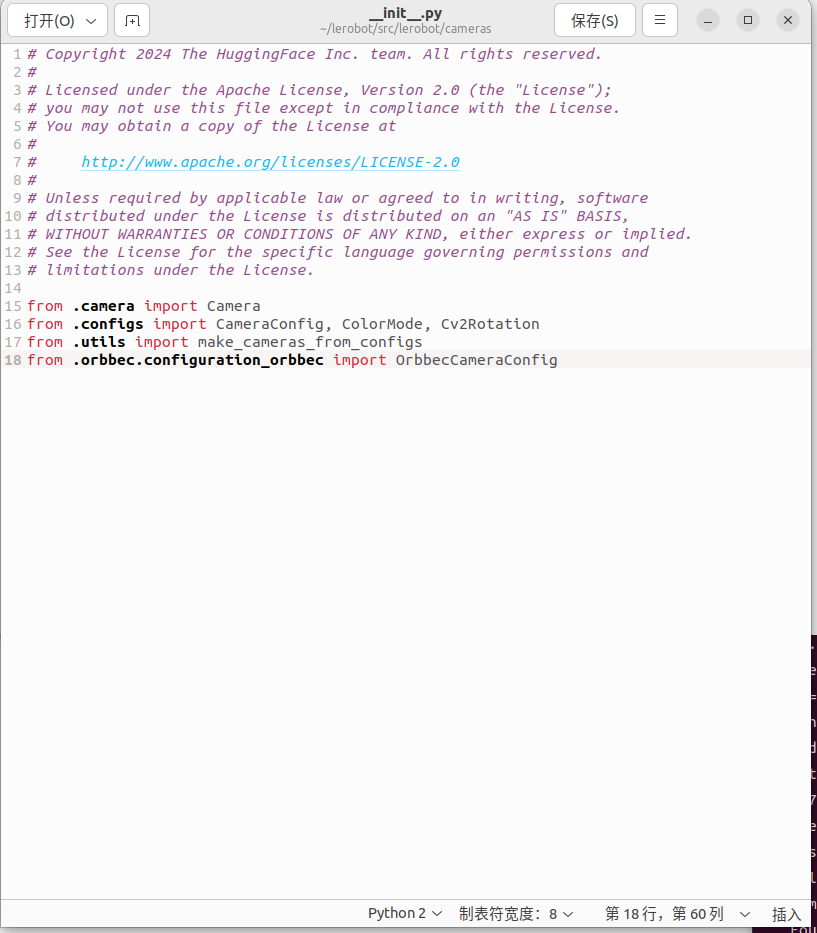
- Encontre
__init__.pyno diretório~/lerobot/src/lerobot/camerase adicione o seguinte código na linha 18:
from .orbbec.configuration_orbbec import OrbbecCameraConfig
- 🚀 Etapa 2: Chamada de função e exemplos
Em todos os exemplos a seguir, substitua starai_viola pelo modelo real do braço robótico que você está usando (por exemplo, so100 / so101).
Adicionamos o hiperparâmetro focus_area. Como dados de profundidade muito distantes são inúteis para o braço robótico (ele não consegue alcançar ou agarrar objetos), os dados de profundidade menores ou maiores que o focus_area serão exibidos em preto. O focus_area padrão é (20, 600).
Atualmente, a única resolução suportada é largura: 640, altura: 880.
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
--teleop.type=starai_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_starai_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
--teleop.type=starai_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
Para tarefas subsequentes, como coleta de dados, treinamento e avaliação, o processo é o mesmo que para comandos RGB comuns. Você só precisa substituir a parte relevante no comando RGB comum por:
--robot.cameras="{ front: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:(20,600)}}" \
Você também pode adicionar posteriormente uma câmera RGB monocular adicional.
Depois de conectar suas duas câmeras USB, execute o seguinte script para verificar os números de porta das câmeras. É importante lembrar que a câmera não deve ser conectada a um USB Hub; em vez disso, deve ser conectada diretamente ao dispositivo. A velocidade mais baixa de um USB Hub pode resultar na impossibilidade de ler os dados de imagem.
lerobot-find-cameras opencv # or realsense for Intel Realsense cameras
O terminal imprimirá as seguintes informações. Por exemplo, a câmera do laptop é o index 2 e a câmera USB é o index 4.
--- Detected Cameras ---
Camera #0:
Name: OpenCV Camera @ /dev/video2
Type: OpenCV
Id: /dev/video2
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 480
Fps: 30.0
--------------------
Camera #1:
Name: OpenCV Camera @ /dev/video4
Type: OpenCV
Id: /dev/video4
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 360
Fps: 30.0
--------------------
Finalizing image saving...
Image capture finished. Images saved to outputs/captured_images
Você pode encontrar as imagens capturadas por cada câmera no diretório outputs/images_from_opencv_cameras e verificar as informações de índice de porta correspondentes às câmeras em diferentes posições.
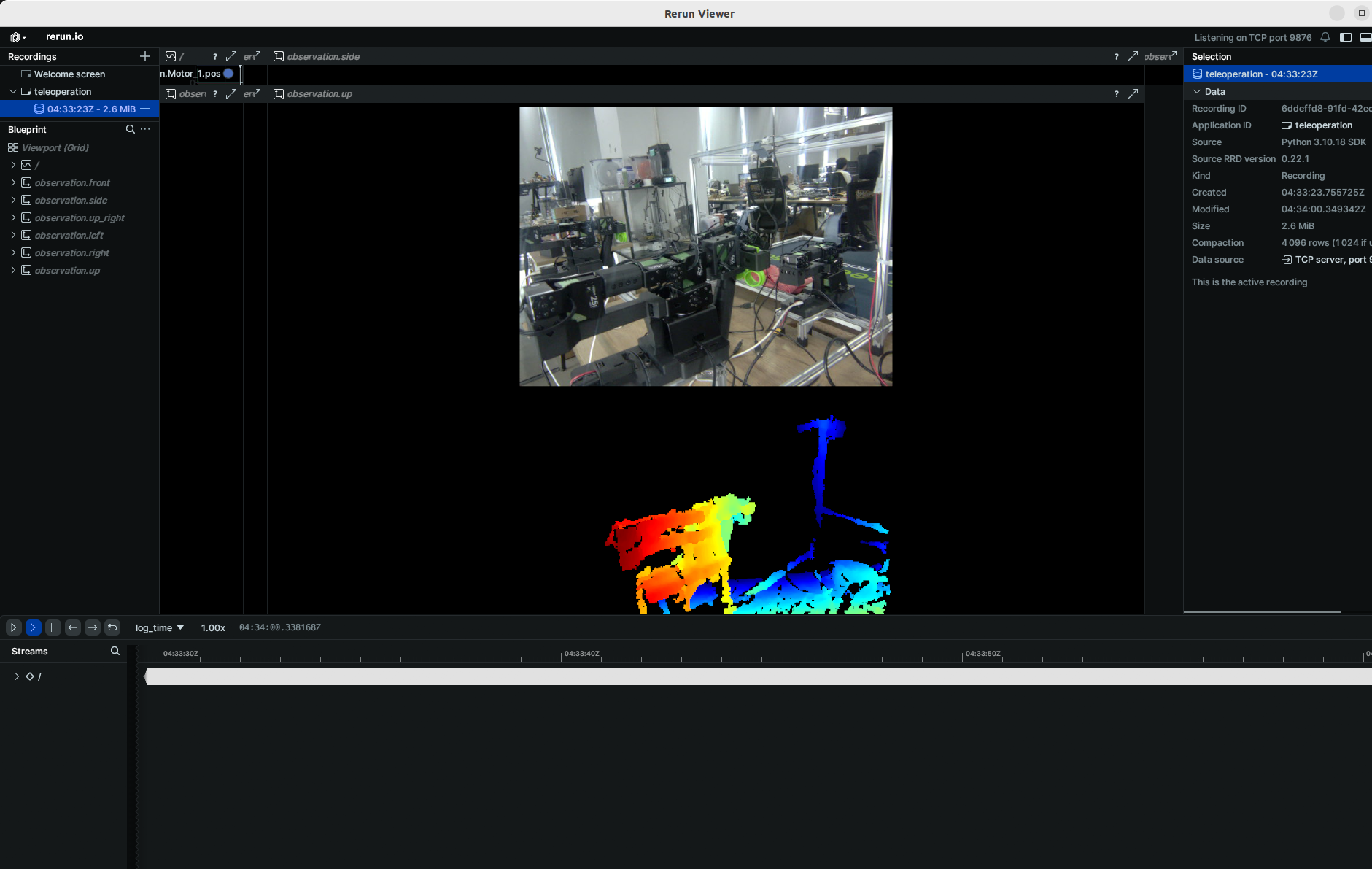
Após confirmar as câmeras externas, substitua as informações de câmera abaixo pelas informações reais das suas câmeras, e você poderá exibir as câmeras no seu computador durante a operação remota:
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
Imagens no formato fourcc: "MJPG" são compactadas. Você pode tentar resoluções mais altas e também pode tentar o formato YUYV. No entanto, este último reduzirá a resolução da imagem e o FPS, causando atrasos na operação do braço robótico. Atualmente, no formato MJPG, é possível suportar 3 câmeras com resolução de 1920*1080 mantendo 30FPS. Dito isso, ainda não é recomendado conectar 2 câmeras a um computador através do mesmo USB HUB.
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
Imagens no formato fourcc: "MJPG" são compactadas. Você pode tentar resoluções mais altas e também pode tentar o formato YUYV. No entanto, este último reduzirá a resolução da imagem e o FPS, causando atrasos na operação do braço robótico. Atualmente, no formato MJPG, é possível suportar 3 câmeras com resolução de 1920*1080 mantendo 30FPS. Dito isso, ainda não é recomendado conectar 2 câmeras a um computador através do mesmo USB HUB.
Braço Duplo
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--display_data=true
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--display_data=true
Imagens no formato fourcc: "MJPG" são compactadas. Você pode tentar resoluções mais altas e também pode tentar o formato YUYV. No entanto, este último reduzirá a resolução da imagem e o FPS, causando atrasos na operação do braço robótico. Atualmente, no formato MJPG, é possível suportar 3 câmeras com resolução de 1920*1080 mantendo 30FPS. Dito isso, ainda não é recomendado conectar 2 câmeras a um computador através do mesmo USB HUB.
Se você encontrar um bug como este.
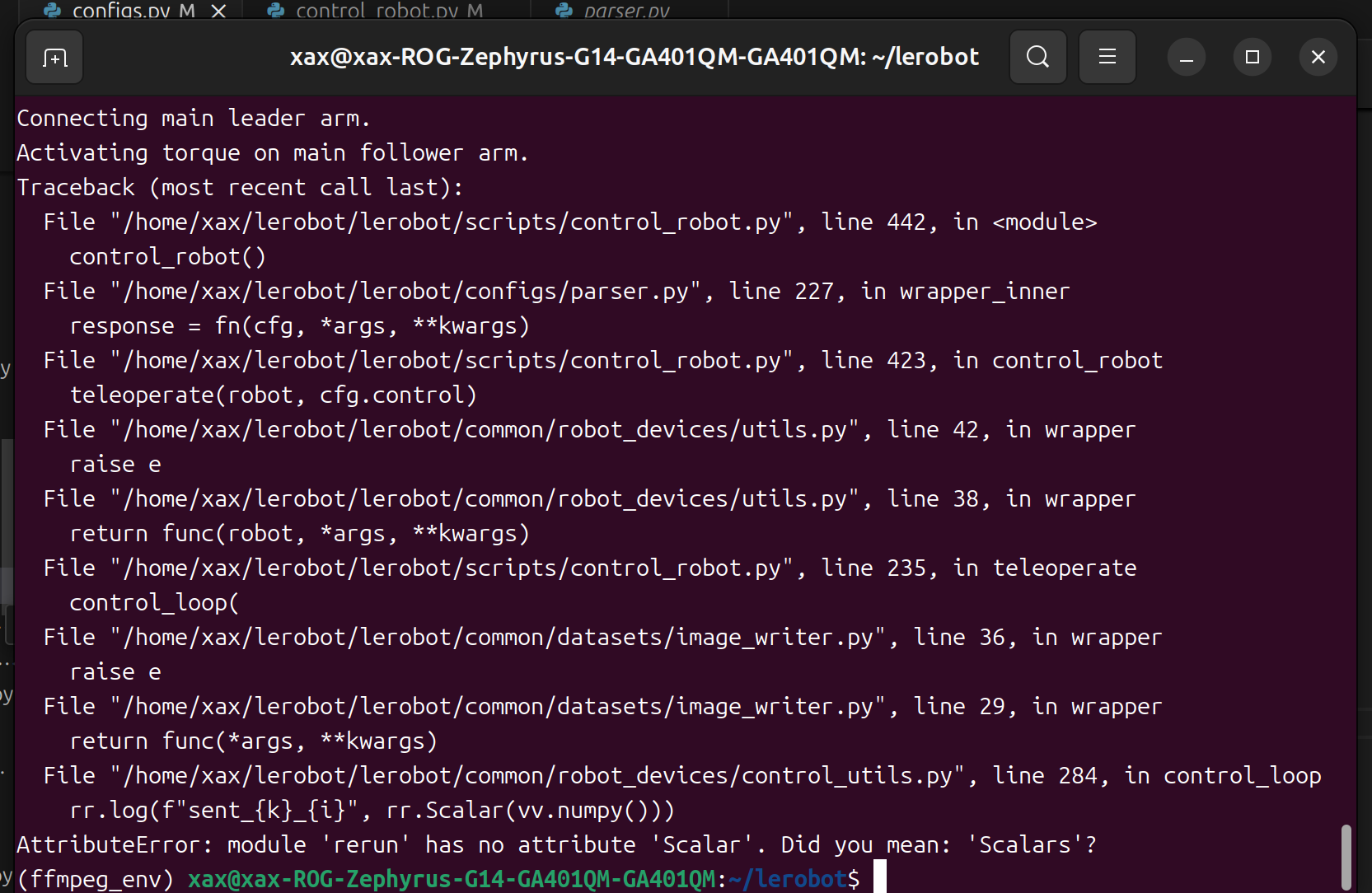
Você pode fazer downgrade da versão do rerun para resolver o problema.
pip3 install rerun-sdk==0.23
Registrar o conjunto de dados
Depois que você estiver familiarizado com a teleoperação, poderá gravar seu primeiro conjunto de dados.
Se você quiser usar os recursos do hub do Hugging Face para enviar seu conjunto de dados e ainda não fez isso antes, certifique-se de ter feito login usando um token com permissão de escrita, que pode ser gerado em Hugging Face settings:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credential
Armazene o nome do seu repositório do Hugging Face em uma variável para executar estes comandos:
HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USER
Grave 10 episódios e envie seu conjunto de dados para o hub:
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Dual-Arm
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Para diferenciar entre configurações de braço único e de dois braços, aqui o --dataset.repo_id é nomeado starai/record-test_bi_arm.
Se você não quiser usar o recurso de envio de conjuntos de dados para o Hugging Face Hub, pode escolher --dataset.push_to_hub=false. Além disso, substitua --dataset.repo_id=${HF_USER}/starai por um nome de pasta local personalizado, por exemplo, --dataset.repo_id=starai/record-test. Os dados serão armazenados em ~/.cache/huggingface/lerobot no diretório inicial do sistema.
Sem enviar para o Hub:
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Dual-Arm
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Para diferenciar entre configurações de braço único e de dois braços, aqui o --dataset.repo_id é nomeado starai/record-test_bi_arm.
recordoferece um conjunto de ferramentas para capturar e gerenciar dados durante as operações do robô:
1. Armazenamento de Dados
- Os dados são armazenados no formato
LeRobotDatasete salvos em disco durante o processo de gravação.
2. Checkpoint e Continuação
- Checkpoints são criados automaticamente durante a gravação.
- Se ocorrer algum problema, você pode retomar executando novamente o mesmo comando com
--resume=true. Ao retomar a gravação, você deve definir--dataset.num_episodescomo o número adicional de episódios a serem gravados, não o número total de episódios desejado no conjunto de dados! - Para iniciar a gravação do zero, exclua manualmente o diretório do conjunto de dados.
3. Parâmetros de Gravação
Defina o fluxo de trabalho de gravação de dados usando parâmetros de linha de comando:
Parameter Description
- warmup-time-s: The initialization time.
- episode-time-s: The duration for each data collection session.
- reset-time-s: The preparation time between each data collection.
- num-episodes: The expected number of data sets to collect.
- push-to-hub: Determines whether to upload the data to HuggingFace Hub.
4. Controles de Teclado Durante a Gravação
Use atalhos de teclado para controlar o fluxo de trabalho de gravação de dados:
- Pressione seta para a direita (→): Interrompe antecipadamente o episódio atual ou redefine o tempo e, em seguida, passa para o próximo.
- Pressione seta para a esquerda (←): Cancela o episódio atual e o grava novamente.
- Pressione ESC: Interrompe imediatamente a sessão, codifica o vídeo e envia o conjunto de dados.
Se o teclado não funcionar, talvez seja necessário instalar outra versão do pynput.
pip install pynput==1.6.8
Reproduzir um episódio
Agora tente reproduzir o primeiro episódio no seu robô:
Viola:
lerobot-replay \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--dataset.repo_id=starai/record-test \
--dataset.episode=1 # choose the episode you want to replay
Cello:
lerobot-replay \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--dataset.repo_id=starai/record-test \
--dataset.episode=1 # choose the episode you want to replay
Braço Duplo
Viola:
lerobot-replay \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode=0 # choose the episode you want to replay
Cello:
lerobot-replay \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode=0 # choose the episode you want to replay
Treinar e Avaliar Política
ACT
Consulte ACT
Treinar
Viola:
lerobot-train \
--dataset.repo_id=starai/record-test \
--policy.type=act \
--output_dir=outputs/train/act_viola_test \
--job_name=act_viola_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
Cello:
lerobot-train \
--dataset.repo_id=starai/record-test \
--policy.type=act \
--output_dir=outputs/train/act_cello_test \
--job_name=act_cello_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
Braço Duplo
Viola:
lerobot-train \
--dataset.repo_id=starai/record-test_bi_arm \
--policy.type=act \
--output_dir=outputs/train/act_bi_viola_test \
--job_name=act_bi_viola_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
Cello:
lerobot-train \
--dataset.repo_id=starai/record-test_bi_arm \
--policy.type=act \
--output_dir=outputs/train/act_bi_cello_test \
--job_name=act_bi_cello_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
policy.typeoferece suporte à entradadiffusion,pi0,pi0fast- Fornecemos o conjunto de dados como um parâmetro:
dataset.repo_id=starai/record-test. - Vamos carregar a configuração de
configuration_act.py. É importante notar que essa política se adaptará automaticamente aos estados dos motores do robô, às ações dos motores e ao número de câmeras, e será salva no seu conjunto de dados. - Fornecemos
wandb.enable=truepara usar o Weights and Biases para visualizar os gráficos de treinamento. Isso é opcional, mas se você o usar, certifique-se de ter feito login executandowandb login.
Avaliar
Execute o seguinte comando para registrar 10 episódios de avaliação:
Viola:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_staraiviola_arm \
--display_data=false \
--dataset.repo_id=starai/eval_record-test \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/train/act_viola_test/checkpoints/last/pretrained_model
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=lerobot_teleoperator_violin \
# --teleop.port=/dev/ttyUSB0 \
# --teleop.id=my_awesome_leader_arm \
Cello:
lerobot-record \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_staraicello_arm \
--display_data=false \
--dataset.repo_id=starai/eval_record-test \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/train/act_viola_test/checkpoints/last/pretrained_model
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=lerobot_teleoperator_violin \
# --teleop.port=/dev/ttyUSB0 \
# --teleop.id=my_awesome_leader_arm \
Braço Duplo
Viola:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=bi_starai_viola_follower \
--display_data=false \
--dataset.repo_id=starai/eval_record-test_bi_arm \
--dataset.single_task="test" \
--policy.path=outputs/train/act_bi_viola_test/checkpoints/last/pretrained_model
Cello:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=bi_starai_cello_follower \
--display_data=false \
--dataset.repo_id=starai/eval_record-test_bi_arm \
--dataset.single_task="test" \
--policy.path=outputs/train/act_bi_cello_test/checkpoints/last/pretrained_model
Como você pode ver, isso é quase o mesmo que o comando usado anteriormente para registrar o conjunto de dados de treinamento, com algumas mudanças:
-
O parâmetro
--policy.path, que indica o caminho para o arquivo de pesos da sua política treinada (por exemplo,outputs/train/act_viola_test/checkpoints/last/pretrained_model). Se você tiver enviado seus pesos de modelo para o Hub, também poderá usar o repositório do modelo (por exemplo,${HF_USER}/starai). -
O nome do conjunto de dados de avaliação
dataset.repo_idcomeça comeval_. Essa operação registrará vídeos e dados especificamente para a fase de avaliação, que serão salvos em uma pasta que começa comeval_, comostarai/eval_record-test. -
Se você encontrar
File exists: 'home/xxxx/.cache/huggingface/lerobot/xxxxx/starai/eval_xxxx'durante a fase de avaliação, exclua a pasta que começa comeval_e execute o programa novamente. -
Ao encontrar
mean is infinity. You should either initialize with stats as an argument or use a pretrained model, certifique-se de que as palavras-chave comoupefrontno parâmetro--robot.camerassejam estritamente consistentes com as usadas durante a fase de coleta de dados.
SmolVLA
Consulte SmolVLA
pip install -e ".[smolvla]"
Treinar
lerobot-train \
--policy.path=lerobot/smolvla_base \ # <- Use pretrained fine-tuned model
--dataset.repo_id=${HF_USER}/mydataset \
--batch_size=64 \
--steps=20000 \
--output_dir=outputs/train/my_smolvla \
--job_name=my_smolvla_training \
--policy.device=cuda \
--wandb.enable=true
Avaliar
lerobot-record \
--robot.type=starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 1280, height: 720, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 1280, height: 720, fps: 30, fourcc: "MJPG"}}" \
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--dataset.repo_id=${HF_USER}/eval_DATASET_NAME_test \
--dataset.episode_time_s=50 \
--dataset.num_episodes=10 \
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=so100_leader \
# --teleop.port=/dev/ttyACM0 \
# --teleop.id=my_red_leader_arm \
--policy.path=HF_USER/FINETUNE_MODEL_NAME # <- Use your fine-tuned model
Libero
Consulte Libero
LIBERO é um benchmark projetado para estudar o aprendizado contínuo de robôs. A ideia é que os robôs não serão apenas pré-treinados uma vez em uma fábrica; eles precisarão continuar aprendendo e se adaptando com seus usuários humanos ao longo do tempo. Essa adaptação contínua é chamada de aprendizado ao longo da vida na tomada de decisão (LLDM), e é um passo fundamental para construir robôs que se tornem ajudantes verdadeiramente personalizados.
LIBERO inclui cinco conjuntos de tarefas:
-
LIBERO-Spatial (libero_spatial) – tarefas que exigem raciocínio sobre relações espaciais.
-
LIBERO-Object (libero_object) – tarefas centradas na manipulação de diferentes objetos.
-
LIBERO-Goal (libero_goal) – tarefas condicionadas a objetivos em que o robô deve se adaptar a alvos em mudança.
-
LIBERO-90 (libero_90) – 90 tarefas de horizonte curto da coleção LIBERO-100.
-
LIBERO-Long (libero_10) – 10 tarefas de horizonte longo da coleção LIBERO-100.
Juntas, essas suítes cobrem 130 tarefas, desde manipulações simples de objetos até cenários complexos de múltiplas etapas. O LIBERO foi projetado para crescer com o tempo e servir como um benchmark compartilhado onde a comunidade pode testar e aprimorar algoritmos de aprendizado ao longo da vida.
Treinar
lerobot-train \
--policy.type=smolvla \
--policy.repo_id=${HF_USER}/libero-test \
--dataset.repo_id=HuggingFaceVLA/libero \
--env.type=libero \
--env.task=libero_10 \
--output_dir=./outputs/ \
--steps=100000 \
--batch_size=4 \
--eval.batch_size=1 \
--eval.n_episodes=1 \
--eval_freq=1000 \
Avaliação
Para instalar o LIBERO, depois de seguir as instruções oficiais do LeRobot, basta fazer: pip install -e ".[libero]"
Avaliação de uma única suíte
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object \
--eval.batch_size=2 \
--eval.n_episodes=3
-
--env.taskescolhe a suíte (libero_object, libero_spatial, etc.). -
--eval.batch_sizecontrola quantos ambientes são executados em paralelo. -
--eval.n_episodesdefine quantos episódios serão executados no total.
Avaliação de múltiplas suítes
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object,libero_spatial \
--eval.batch_size=1 \
--eval.n_episodes=2
- Passe uma lista separada por vírgulas para
--env.taskpara avaliação de múltiplas suítes.
Pi0
Consulte Pi0
pip install -e ".[pi]"
Treinar
lerobot-train \
--policy.type=pi0 \
--dataset.repo_id=seeed/eval_test123 \
--job_name=pi0_training \
--output_dir=outputs/pi0_training \
--policy.pretrained_path=lerobot/pi0_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--policy.dtype=bfloat16 \
--steps=20000 \
--policy.device=cuda \
--batch_size=32 \
--wandb.enable=false
Avaliar
lerobot-record \
--robot.type=starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--robot.id=my_awesome_staraiviola_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--policy.path=outputs/pi0_training/checkpoints/last/pretrained_model
Pi0.5
Consulte Pi0.5
pip install -e ".[pi]"
Treinar
lerobot-train \
--dataset.repo_id=seeed/eval_test123 \
--policy.type=pi05 \
--output_dir=outputs/pi05_training \
--job_name=pi05_training \
--policy.pretrained_path=lerobot/pi05_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--wandb.enable=false \
--policy.dtype=bfloat16 \
--steps=3000 \
--policy.device=cuda \
--batch_size=32
Avaliar
lerobot-record \
--robot.type=starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--robot.id=my_awesome_staraiviola_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--policy.path=outputs/pi05_training/checkpoints/last/pretrained_model
GR00T N1.5
Consulte GR00T N1.5
Retomar o treinamento a partir de um checkpoint específico.
Viola:
lerobot-train \
--config_path=outputs/train/act_viola_test/checkpoints/last/pretrained_model/train_config.json \
--resume=true \
--steps=400000
Cello:
lerobot-train \
--config_path=outputs/train/act_cello_test/checkpoints/last/pretrained_model/train_config.json \
--resume=true \
--steps=400000
FAQ
-
Se você estiver usando o tutorial deste documento, por favor, faça
git clonedo repositório GitHub recomendado:https://github.com/servodevelop/lerobot.git. -
Se a teleoperação funcionar normalmente, mas a teleoperação com uma Câmera não exibir a interface de imagem, consulte aqui.
-
Se você encontrar um problema com o libtiff durante a teleoperação do conjunto de dados, atualize a versão do libtiff.
conda install libtiff==4.5.0 # for Ubuntu 22.04, use libtiff==4.5.1 -
Após instalar o LeRobot, ele pode desinstalar automaticamente a versão GPU do PyTorch, então você precisa instalar manualmente o torch-gpu.
-
Para Jetson, por favor, instale primeiro o PyTorch e o Torchvision antes de executar
conda install -y -c conda-forge ffmpeg, caso contrário, haverá um problema de incompatibilidade de versão ao compilar o torchvision. -
Treinar 50 episódios de dados ACT em um laptop com 3060 8GB leva aproximadamente 6 horas, enquanto treinar 50 episódios em um computador com 4090 ou A100 leva cerca de 2–3 horas.
-
Durante a coleta de dados, garanta a estabilidade da posição e do ângulo da câmera, bem como da iluminação do ambiente, e minimize o fundo instável e os pedestres capturados pela câmera. Caso contrário, grandes mudanças no ambiente de implantação podem fazer com que o braço robótico não consiga agarrar objetos normalmente.
-
O
num-episodesno comando de coleta de dados deve garantir coleta de dados suficiente e não deve ser pausado manualmente no meio. Isso porque a média e a variância dos dados são calculadas somente após a conclusão da coleta, o que é necessário para o treinamento. -
Se o programa informar que não consegue ler os dados de imagem da câmera USB, certifique-se de que a câmera USB não esteja conectada por meio de um Hub. A câmera USB deve ser conectada diretamente ao dispositivo para garantir taxas rápidas de transmissão de imagem.
Citação
StarAI Robot Arm ROS2 Moveit2: star-arm-moveit2
lerobot-starai github: lerobot-starai
STEP: STEP
URDF: URDF
Huggingface Project: Lerobot
ACT ou ALOHA: Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
VQ-BeT: VQ-BeT: Behavior Generation with Latent Actions
Diffusion Policy: Diffusion Policy
TD-MPC: TD-MPC
Suporte Técnico & Discussão de Produtos
Obrigado por escolher nossos produtos! Estamos aqui para oferecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.