Rastreamento de Objetos com reComputer Jetson e PX4
Introdução
reComputer Mini é um minicomputador de IA com tecnologia do módulo NVIDIA Jetson Orin Nano/Orin NX, oferecendo até 100 TOPS de desempenho em IA. Graças ao seu design compacto, ele é altamente adequado para ser instalado em drones para lidar com algumas tarefas de IA. Este Wiki mostrará como usar o reComputer e o px4 para obter rastreamento de alvo em tempo real no drone.

Pré-requisitos
- série de produtos reComputer
- Controlador de voo PX4
- Jetson Pack 6.2 e ROS 2 Humble já instalados
- Câmera 3D Orbbec Gemini 2
Configurar o ambiente de comunicação PX4 do ROS2
Para implementar o monitoramento de estado do drone no Jetson, primeiro consulte este wiki para configurar o ambiente de comunicação ROS2 para o PX4.
Configurar o SDK Python do Gemini 2
O Orbbec Gemini 2 é uma câmera 3D RGB‑D de alta precisão que captura dados sincronizados de profundidade e cor para aplicações como robótica, digitalização 3D e visão computacional.
Passo 1. Instale as dependências e clone o repositório:
sudo apt-get install python3-dev python3-venv python3-pip python3-opencv
#install pybind11
pip install pybind11
#clone the repository
git clone https://github.com/orbbec/pyorbbecsdk.git
#Install the necessary packages
cd pyorbbecsdk
pip install -r requirements.txt
Passo 2. Compile e instale o projeto:
mkdir build && cd build
#Build the project
cmake \
-Dpybind11_DIR=`pybind11-config --cmakedir` \
-DPython3_EXECUTABLE=/usr/bin/python3.10 \
-DPython3_INCLUDE_DIR=/usr/include/python3.10 \
-DPython3_LIBRARY=/usr/lib/aarch64-linux-gnu/libpython3.10.so \
..
make -j4
sudo make install
#apply the python SDK
pip install wheel
python setup.py bdist_wheel
pip install dist/*.whl
#Configure udev_rules
export PYTHONPATH=$PYTHONPATH:$(pwd)/install/lib/
sudo bash ./scripts/install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
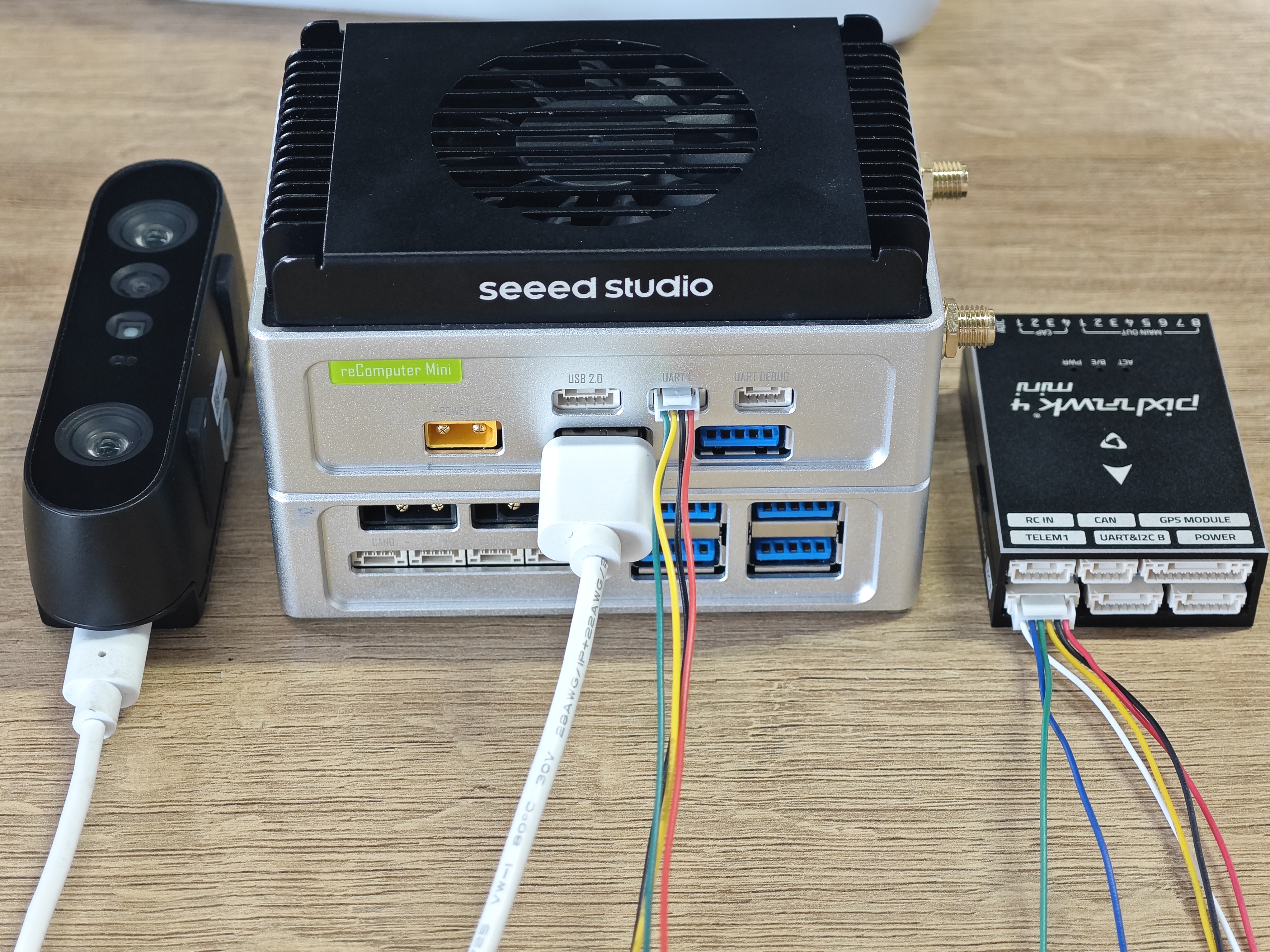
Ler os tópicos publicados pelo px4 no ROS2
Conecte o controlador PX4 à porta serial UART1 do Jetson
Abra um terminal e inicie o Agent no Jetson:
cd /path/to/Micro-XRCE-DDS-Agent/build
./MicroXRCEAgent serial --dev /dev/ttyTHS1 -b 921600
Usando o seguinte comando e abrindo outro terminal, você pode ver o tópico de status publicado pelo px4:
ros2 topic list | grep "/fmu/out/"
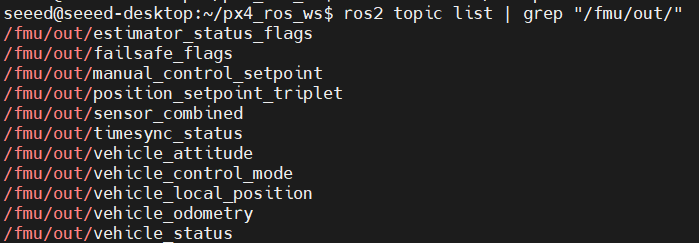
Lendo o conteúdo dos seguintes tópicos, você pode obter as informações básicas de status do drone:
- /fmu/out/failsafe_flags -> Indicadores das condições atuais de failsafe.
- /fmu/out/sensor_combined -> Dados brutos sincronizados de IMU, magnetômetro e barômetro.
- /fmu/out/timesync_status -> Status da sincronização de tempo com fontes externas.
- /fmu/out/vehicle_attitude -> Orientação atual da aeronave como um quaternión.
- /fmu/out/vehicle_control_mode -> Modos atuais de controle e navegação ativos.
- /fmu/out/vehicle_local_position -> Posição e velocidade no referencial local NED.
- /fmu/out/vehicle_odometry -> Dados completos de pose e velocidade em 6 DoF.
- /fmu/out/vehicle_status -> Estado geral da aeronave, modo e prontidão.
Configurar rapidamente o ambiente de detecção de objetos
Passo 1. De acordo com a sua versão do Jetpack, você pode consultar este wiki para instalar o PyTorch e o Torchvision.
Passo 2. Instale as dependências e pacotes necessários:
sudo apt-get update
sudo apt-get -y install libcusparselt0 libcusparselt-dev
pip install ultralytics
pip install https://github.com/ultralytics/assets/releases/download/v0.0.0/onnxruntime_gpu-1.20.0-cp310-cp310-linux_aarch64.whl
pip install numpy==1.23.5
Passo 3. Baixe o modelo pré-treinado YOLOv11n:
wget -O yolo11n.pt https://github.com/ultralytics/assets/releases/download/v8.3.0/yolo11n.pt
Passo 4. Exporte o modelo engine para usar inferência com tensorrt:
yolo export model=/path/to/yolo11n.pt format=engine device=0 half=True dynamic=True
Instalar o pacote ROS2 para rastreamento de alvos
cd /path/to/your/work_space/src
git clone https://github.com/zibochen6/ROS2-package-for-target-tracking.git
cd ..
# build the package
colcon build
Antes de executar o nó de detecção, você precisa mover o arquivo de modelo engine gerado anteriormente para o diretório /ROS2-package-for-target-tracking/models. Além disso, você deve clonar os pacotes px4_msgs e px4_ros_com (consulte este wiki) no diretório src do seu workspace.
A estrutura do seu diretório src deve ser a seguinte:
└── src
├── detect
├── px4_msgs
└── px4_ros_com
Para executar o pacote ROS2 para operação normal de rastreamento de alvos, você precisa abrir um terminal e iniciar o MicroXRCEAgent:
./MicroXRCEAgent serial --dev /dev/ttyTHS1 -b 921600
# Open another terminal and run the detection node
cd /path/to/your/work_space
source install/setup.bash
ros2 run detect detect
O vídeo acima apresenta um exemplo de obtenção de rastreamento de alvos em um drone. Ele localiza o alvo por meio de detecção de alvos e usa o algoritmo de rastreamento de alvos ByteTrack para rastrear com precisão o alvo específico. Ao mesmo tempo, imagens de profundidade são usadas para estimar a distância entre o drone e o alvo.
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para lhe fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.