ORB-SLAM3 com Orbbec Gemini2

A Orbbec Gemini 2 é uma câmera RGB-D de alto desempenho com um sensor de profundidade de luz estruturada de visão dupla e um IMU integrado de 6 eixos. Ela fornece fluxos de dados de profundidade e RGB totalmente sincronizados, garantindo um alinhamento de profundidade para cor em tempo real e de alta precisão, o que é essencial para percepção 3D precisa. Essa combinação de recursos torna a Gemini 2 ideal para robótica, visão computacional e outras aplicações 3D, possibilitando tarefas como detecção de objetos, mapeamento, navegação e análise espacial com alta confiabilidade e precisão. A câmera é compacta, fácil de configurar e totalmente suportada pelo Orbbec SDK, o que a torna adequada tanto para pesquisa quanto para implantações industriais.
Introdução
ORB-SLAM3 é um algoritmo avançado de SLAM visual para câmeras monoculares, estéreo e RGB-D. Ele usa recursos ORB para rastreamento e mapeamento robustos, suporta fechamento de loop e relocalização, e oferece alta precisão e eficiência para robótica, AR/VR e navegação autônoma. Este wiki fornece etapas abrangentes para configurar e executar o ORB-SLAM3 na Série reComputer Jetson usando uma câmera Orbbec Gemini2 RGB-D para aplicações avançadas de SLAM visual.
Pré-requisitos
- reComputer J30/40 com Jetpack 6.2 pré-instalado
- Câmera 3D Orbbec Gemini2
- Ambiente ROS2 Humble instalado

Instalar Orbbec SDK
Passo 1. Baixe e instale o Orbbec SDK para arquitetura ARM64:
# Download Orbbec SDK
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.11/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
# Unzip the SDK
unzip OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
Passo 2. Compile os exemplos e teste:
# Install udev rules
cd OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64/shared/
sudo chmod +x ./install_udev_rules.sh
sudo ./install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
# Build examples and setup
cd ..
./build_examples.sh
./setup.sh
Compilando o ORB-SLAM3
Passo 1. Instale as dependências do sistema:
sudo apt update && sudo apt install -y \
cmake build-essential libeigen3-dev libopencv-dev \
libglew-dev libpython2.7-dev ffmpeg libavcodec-dev \
libavutil-dev libavformat-dev libswscale-dev \
libavdevice-dev libdc1394-22-dev libraw1394-dev \
libjpeg-dev libpng-dev libtiff5-dev libopenexr-dev \
libepoxy-dev python3-dev libboost-serialization-dev
Passo 2. Instale o Pangolin, que é necessário para a visualização do ORB-SLAM3:
git clone --recursive https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
git submodule update --init --recursive
# Install prerequisites
./scripts/install_prerequisites.sh recommended
# Remove conflicting packages and install OpenEXR
sudo apt remove libilmbase-dev -y
sudo apt install libopenexr-dev libimath-dev -y
# Build and install
mkdir build && cd build
cmake ..
make -j$(nproc)
sudo make install
Se você encontrar erros de compilação relacionados ao OpenEXR, talvez seja necessário modificar o código-fonte:
Em ./components/pango_image/src/image_io_exr.cpp, substitua:
#include <ImfChannelList.h>
#include <ImfFrameBuffer.h>
#include <ImfInputFile.h>
#include <ImfOutputFile.h>
por:
#include <OpenEXR/ImfChannelList.h>
#include <OpenEXR/ImfFrameBuffer.h>
#include <OpenEXR/ImfInputFile.h>
#include <OpenEXR/ImfOutputFile.h>
Passo 3. Configuração para compilar o ORB-SLAM3
cd ~
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
cd ORB_SLAM3
O ORB-SLAM3 pode ter problemas de compatibilidade com padrões mais novos de C++. Corrija o problema de monotonic_clock:
# Replace monotonic_clock with steady_clock in all source files
find Examples -name "*.cc" -exec sed -i 's/monotonic_clock/steady_clock/g' {} \;
Por exemplo, em Examples/Stereo/stereo_euroc.cc:
// Change from:
std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
// To:
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
Passo 4. Teste se o Pangolin foi instalado corretamente:
./examples/SimpleDisplay/SimpleDisplay
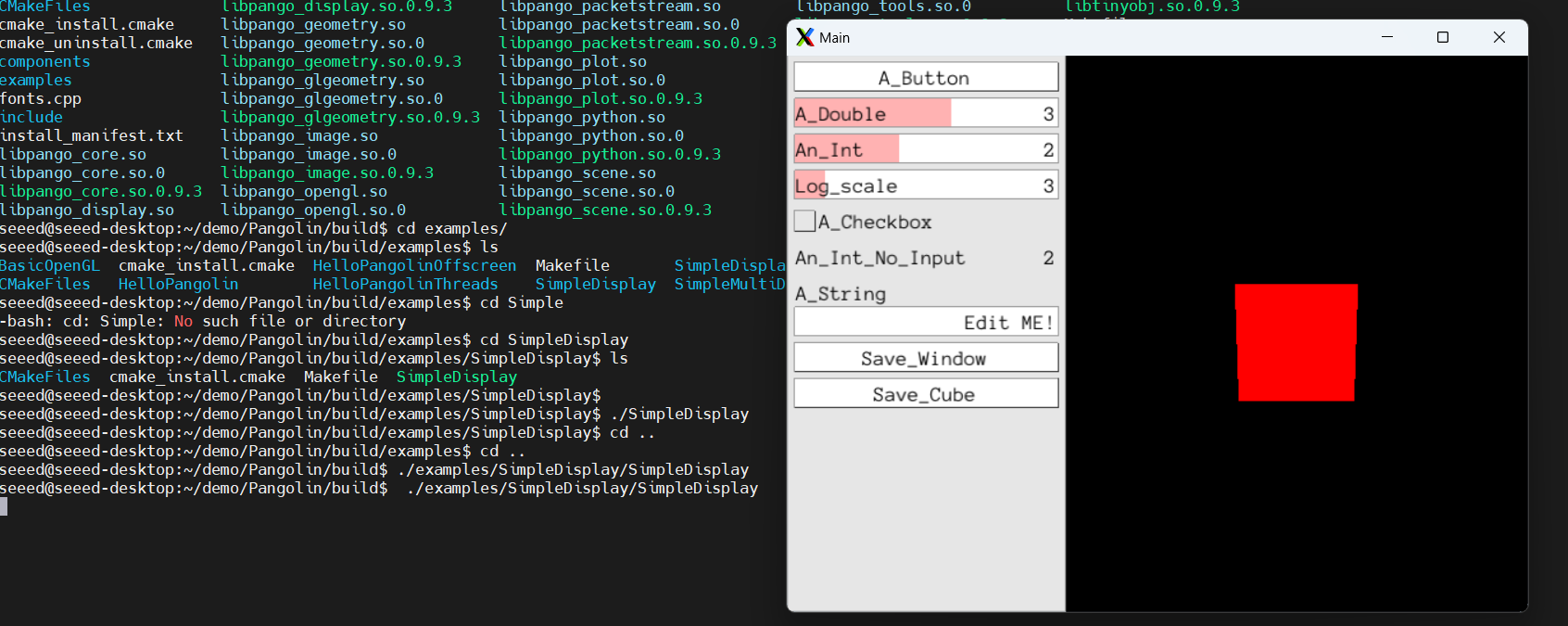
Se a instalação tiver sido concluída corretamente, a janela mostrada na imagem acima poderá ser aberta normalmente.
Passo 5. Modificar CMakeLists.txt
Modifique o arquivo CMakeLists.txt para tornar o projeto compatível com o Orbbec SDK. Copie diretamente a configuração completa de CMakeList.txt a seguir:
Você precisa modificar: set(ORBBEC_SDK_PATH "/home/seeed/demo/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64") para o caminho onde você instalou o seu próprio SDK.
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(ORB_SLAM3)
IF(NOT CMAKE_BUILD_TYPE)
SET(CMAKE_BUILD_TYPE Release)
ENDIF()
MESSAGE("Build type: " ${CMAKE_BUILD_TYPE})
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3")
set(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} -march=native")
set(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} -march=native")
# Check C++14, C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++14" COMPILER_SUPPORTS_CXX14)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX14)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14")
add_definitions(-DCOMPILEDWITHC14)
message(STATUS "Using flag -std=c++14.")
elseif(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++14/11 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 4.4)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.4 not found.")
endif()
MESSAGE("OPENCV VERSION:")
MESSAGE(${OpenCV_VERSION})
find_package(Eigen3 3.1.0 REQUIRED)
find_package(Pangolin REQUIRED)
find_package(realsense2)
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/include
${PROJECT_SOURCE_DIR}/include/CameraModels
${PROJECT_SOURCE_DIR}/Thirdparty/Sophus
${EIGEN3_INCLUDE_DIR}
${Pangolin_INCLUDE_DIRS}
)
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
add_library(${PROJECT_NAME} SHARED
src/System.cc
src/Tracking.cc
src/LocalMapping.cc
src/LoopClosing.cc
src/ORBextractor.cc
src/ORBmatcher.cc
src/FrameDrawer.cc
src/Converter.cc
src/MapPoint.cc
src/KeyFrame.cc
src/Atlas.cc
src/Map.cc
src/MapDrawer.cc
src/Optimizer.cc
src/Frame.cc
src/KeyFrameDatabase.cc
src/Sim3Solver.cc
src/Viewer.cc
src/ImuTypes.cc
src/G2oTypes.cc
src/CameraModels/Pinhole.cpp
src/CameraModels/KannalaBrandt8.cpp
src/OptimizableTypes.cpp
src/MLPnPsolver.cpp
src/GeometricTools.cc
src/TwoViewReconstruction.cc
src/Config.cc
src/Settings.cc
include/System.h
include/Tracking.h
include/LocalMapping.h
include/LoopClosing.h
include/ORBextractor.h
include/ORBmatcher.h
include/FrameDrawer.h
include/Converter.h
include/MapPoint.h
include/KeyFrame.h
include/Atlas.h
include/Map.h
include/MapDrawer.h
include/Optimizer.h
include/Frame.h
include/KeyFrameDatabase.h
include/Sim3Solver.h
include/Viewer.h
include/ImuTypes.h
include/G2oTypes.h
include/CameraModels/GeometricCamera.h
include/CameraModels/Pinhole.h
include/CameraModels/KannalaBrandt8.h
include/OptimizableTypes.h
include/MLPnPsolver.h
include/GeometricTools.h
include/TwoViewReconstruction.h
include/SerializationUtils.h
include/Config.h
include/Settings.h)
add_subdirectory(Thirdparty/g2o)
target_link_libraries(${PROJECT_NAME}
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/Thirdparty/g2o/lib/libg2o.so
-lboost_serialization
-lcrypto
)
# If RealSense SDK is found the library is added and its examples compiled
if(realsense2_FOUND)
include_directories(${PROJECT_NAME}
${realsense_INCLUDE_DIR}
)
target_link_libraries(${PROJECT_NAME}
${realsense2_LIBRARY}
)
endif()
# Check for Orbbec SDK
# Try to find OrbbecSDK in the local directory first
set(ORBBEC_SDK_PATH "/home/seeed/demo/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64")
if(EXISTS ${ORBBEC_SDK_PATH})
set(ORBBEC_FOUND TRUE)
set(ORBBEC_INCLUDE_DIRS ${ORBBEC_SDK_PATH}/include)
set(ORBBEC_LIBRARIES ${ORBBEC_SDK_PATH}/lib/libOrbbecSDK.so)
message(STATUS "Orbbec SDK found at: ${ORBBEC_SDK_PATH}")
message(STATUS "Orbbec SDK include dirs: ${ORBBEC_INCLUDE_DIRS}")
message(STATUS "Orbbec SDK library: ${ORBBEC_LIBRARIES}")
else()
# Fallback to pkg-config
find_package(PkgConfig)
if(PkgConfig_FOUND)
pkg_check_modules(ORBBEC ob_api)
if(ORBBEC_FOUND)
message(STATUS "Orbbec SDK found via pkg-config: ${ORBBEC_VERSION}")
endif()
endif()
endif()
if(ORBBEC_FOUND)
include_directories(${PROJECT_NAME}
${ORBBEC_INCLUDE_DIRS}
)
target_link_libraries(${PROJECT_NAME}
${ORBBEC_LIBRARIES}
)
else()
message(WARNING "Orbbec SDK not found. Orbbec examples will not be compiled.")
endif()
# Build examples
# RGB-D examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D)
add_executable(rgbd_tum
Examples/RGB-D/rgbd_tum.cc)
target_link_libraries(rgbd_tum ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(rgbd_realsense_D435i
Examples/RGB-D/rgbd_realsense_D435i.cc)
target_link_libraries(rgbd_realsense_D435i ${PROJECT_NAME})
endif()
if(ORBBEC_FOUND)
add_executable(rgbd_orbbec_gemini2
Examples/RGB-D/rgbd_orbbec_gemini2_cpp.cc)
target_link_libraries(rgbd_orbbec_gemini2 ${PROJECT_NAME})
endif()
# RGB-D inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D-Inertial)
if(realsense2_FOUND)
add_executable(rgbd_inertial_realsense_D435i
Examples/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc)
target_link_libraries(rgbd_inertial_realsense_D435i ${PROJECT_NAME})
endif()
# Stereo examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo)
add_executable(stereo_kitti
Examples/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti ${PROJECT_NAME})
add_executable(stereo_euroc
Examples/Stereo/stereo_euroc.cc)
target_link_libraries(stereo_euroc ${PROJECT_NAME})
add_executable(stereo_tum_vi
Examples/Stereo/stereo_tum_vi.cc)
target_link_libraries(stereo_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_realsense_t265
Examples/Stereo/stereo_realsense_t265.cc)
target_link_libraries(stereo_realsense_t265 ${PROJECT_NAME})
add_executable(stereo_realsense_D435i
Examples/Stereo/stereo_realsense_D435i.cc)
target_link_libraries(stereo_realsense_D435i ${PROJECT_NAME})
endif()
# Monocular examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular)
add_executable(mono_tum
Examples/Monocular/mono_tum.cc)
target_link_libraries(mono_tum ${PROJECT_NAME})
add_executable(mono_kitti
Examples/Monocular/mono_kitti.cc)
target_link_libraries(mono_kitti ${PROJECT_NAME})
add_executable(mono_euroc
Examples/Monocular/mono_euroc.cc)
target_link_libraries(mono_euroc ${PROJECT_NAME})
add_executable(mono_tum_vi
Examples/Monocular/mono_tum_vi.cc)
target_link_libraries(mono_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_realsense_t265
Examples/Monocular/mono_realsense_t265.cc)
target_link_libraries(mono_realsense_t265 ${PROJECT_NAME})
add_executable(mono_realsense_D435i
Examples/Monocular/mono_realsense_D435i.cc)
target_link_libraries(mono_realsense_D435i ${PROJECT_NAME})
endif()
# Monocular inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular-Inertial)
add_executable(mono_inertial_euroc
Examples/Monocular-Inertial/mono_inertial_euroc.cc)
target_link_libraries(mono_inertial_euroc ${PROJECT_NAME})
add_executable(mono_inertial_tum_vi
Examples/Monocular-Inertial/mono_inertial_tum_vi.cc)
target_link_libraries(mono_inertial_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_inertial_realsense_t265
Examples/Monocular-Inertial/mono_inertial_realsense_t265.cc)
target_link_libraries(mono_inertial_realsense_t265 ${PROJECT_NAME})
add_executable(mono_inertial_realsense_D435i
Examples/Monocular-Inertial/mono_inertial_realsense_D435i.cc)
target_link_libraries(mono_inertial_realsense_D435i ${PROJECT_NAME})
endif()
# Stereo Inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo-Inertial)
add_executable(stereo_inertial_euroc
Examples/Stereo-Inertial/stereo_inertial_euroc.cc)
target_link_libraries(stereo_inertial_euroc ${PROJECT_NAME})
add_executable(stereo_inertial_tum_vi
Examples/Stereo-Inertial/stereo_inertial_tum_vi.cc)
target_link_libraries(stereo_inertial_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_inertial_realsense_t265
Examples/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
target_link_libraries(stereo_inertial_realsense_t265 ${PROJECT_NAME})
add_executable(stereo_inertial_realsense_D435i
Examples/Stereo-Inertial/stereo_inertial_realsense_D435i.cc)
target_link_libraries(stereo_inertial_realsense_D435i ${PROJECT_NAME})
endif()
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Calibration)
if(realsense2_FOUND)
add_executable(recorder_realsense_D435i
Examples/Calibration/recorder_realsense_D435i.cc)
target_link_libraries(recorder_realsense_D435i ${PROJECT_NAME})
add_executable(recorder_realsense_T265
Examples/Calibration/recorder_realsense_T265.cc)
target_link_libraries(recorder_realsense_T265 ${PROJECT_NAME})
endif()
# Old examples - DISABLED to avoid compilation issues
# Uncomment the following lines if you need the old examples
# # RGB-D examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D)
#
# add_executable(rgbd_tum_old
# Examples_old/RGB-D/rgbd_tum.cc)
# target_link_libraries(rgbd_tum_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(rgbd_realsense_D435i_old
# Examples_old/RGB-D/rgbd_realsense_D435i.cc)
# target_link_libraries(rgbd_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# # RGB-D inertial examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D-Inertial)
#
# if(realsense2_FOUND)
# add_executable(rgbd_inertial_realsense_D435i_old
# Examples_old/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc)
# target_link_libraries(rgbd_inertial_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Stereo examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo)
#
# add_executable(stereo_kitti_old
# Examples_old/Stereo/stereo_kitti.cc)
# target_link_libraries(stereo_kitti_old ${PROJECT_NAME})
#
# add_executable(stereo_euroc_old
# Examples_old/Stereo/stereo_euroc.cc)
# target_link_libraries(stereo_euroc_old ${PROJECT_NAME})
#
# add_executable(stereo_tum_vi_old
# Examples_old/Stereo/stereo_tum_vi.cc)
# target_link_libraries(stereo_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(stereo_realsense_t265_old
# Examples_old/Stereo/stereo_realsense_t265.cc)
# target_link_libraries(stereo_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(stereo_realsense_D435i_old
# Examples_old/Stereo/stereo_realsense_D435i.cc)
# target_link_libraries(stereo_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Monocular examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular)
#
# add_executable(mono_tum_old
# Examples_old/Monocular/mono_tum.cc)
# target_link_libraries(mono_tum_old ${PROJECT_NAME})
#
# add_executable(mono_kitti_old
# Examples_old/Monocular/mono_kitti.cc)
# target_link_libraries(mono_tum_old ${PROJECT_NAME})
#
# add_executable(mono_euroc_old
# Examples_old/Monocular/mono_euroc.cc)
# target_link_libraries(mono_euroc_old ${PROJECT_NAME})
#
# add_executable(mono_tum_vi_old
# Examples_old/Monocular/mono_tum_vi.cc)
# target_link_libraries(mono_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(mono_realsense_t265_old
# Examples_old/Monocular/mono_realsense_t265.cc)
# target_link_libraries(mono_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(mono_realsense_D435i_old
# Examples_old/Monocular/mono_realsense_D435i.cc)
# target_link_libraries(mono_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Monocular inertial examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular-Inertial)
#
# add_executable(mono_inertial_euroc_old
# Examples_old/Monocular-Inertial/mono_inertial_euroc.cc)
# target_link_libraries(mono_inertial_euroc_old ${PROJECT_NAME})
#
# add_executable(mono_inertial_tum_vi_old
# Examples_old/Monocular-Inertial/mono_inertial_tum_vi.cc)
# target_link_libraries(mono_inertial_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(mono_inertial_realsense_t265_old
# Examples_old/Monocular-Inertial/mono_inertial_realsense_t265.cc)
# target_link_libraries(mono_inertial_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(mono_inertial_realsense_D435i_old
# Examples_old/Monocular-Inertial/mono_inertial_realsense_D435i.cc)
# target_link_libraries(mono_inertial_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Stereo Inertial examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo-Inertial)
#
# add_executable(stereo_inertial_euroc_old
# Examples_old/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
# target_link_libraries(stereo_inertial_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(stereo_inertial_tum_vi_old
# Examples_old/Stereo-Inertial/stereo_inertial_tum_vi.cc)
# target_link_libraries(stereo_inertial_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(stereo_inertial_realsense_t265_old
# Examples_old/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
# target_link_libraries(stereo_inertial_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(stereo_inertial_realsense_D435i_old
# Examples_old/Stereo-Inertial/stereo_inertial_realsense_D435i.cc)
# target_link_libraries(stereo_inertial_realsense_D435i_old ${PROJECT_NAME})
# endif()
Passo 6. Crie um script que use o adaptador Orbbec Gemini2 para o modo RGB-D do ORB-SLAM3
Crie um arquivo chamado rgbd_orbbec_gemini2_cpp.cc no diretório Examples/RGB-D/ da seguinte forma:
rgbd_orbbec_gemini2_cpp.cc
/**
* This file is part of ORB-SLAM3
*
* Copyright (C) 2017-2021 Carlos Campos, Richard Elvira, Juan J. Gómez Rodríguez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
* Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
*
* ORB-SLAM3 is free software: you can redistribute it and/or modify it under the terms of the GNU General Public
* License as published by the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* ORB-SLAM3 is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the
* implied warranty of MERCHANTABILITY or PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along with ORB-SLAM3.
* If not, see <http://www.gnu.org/licenses/>.
*/
# include <signal.h>
# include <stdlib.h>
# include <iostream>
# include <algorithm>
# include <fstream>
# include <chrono>
# include <ctime>
# include <sstream>
# include <condition_variable>
# include <mutex>
# include <thread>
# include <opencv2/core/core.hpp>
# include <libobsensor/ObSensor.hpp>
# include <libobsensor/h/ObTypes.h>
# include <System.h>
using namespace std;
bool b_continue_session;
void exit_loop_handler(int s){
cout << "Finishing session" << endl;
b_continue_session = false;
}
// Orbbec Gemini 2 camera parameters
const int WIDTH = 640;
const int HEIGHT = 480;
const int FPS = 30;
// Global variables for camera data
cv::Mat imCV, depthCV;
double timestamp_image = -1.0;
bool image_ready = false;
int count_im_buffer = 0;
// Mutex and condition variable for thread synchronization
std::mutex imu_mutex;
std::condition_variable cond_image_rec;
// Orbbec pipeline and config using C++ API
std::shared_ptr<ob::Pipeline> pipeline = nullptr;
std::shared_ptr<ob::Config> config = nullptr;
// Callback function for receiving frames from Orbbec Gemini 2
void orbbec_frame_callback(std::shared_ptr<ob::FrameSet> frameSet) {
std::unique_lock<std::mutex> lock(imu_mutex);
if (frameSet == nullptr) {
return;
}
count_im_buffer++;
// Get current timestamp
double new_timestamp_image = std::chrono::duration_cast<std::chrono::milliseconds>(
std::chrono::system_clock::now().time_since_epoch()).count() * 1e-3;
// Limit frame rate to 15 FPS to reduce processing load
if (abs(timestamp_image - new_timestamp_image) < 0.067) { // 1/15 = 0.067 seconds
count_im_buffer--;
return;
}
try {
// Process color frame
auto colorFrame = frameSet->getFrame(OB_FRAME_COLOR);
if (colorFrame != nullptr) {
auto videoFrame = colorFrame->as<ob::VideoFrame>();
uint32_t width = videoFrame->getWidth();
uint32_t height = videoFrame->getHeight();
OBFormat format = videoFrame->getFormat();
// Convert to OpenCV Mat
if (format == OB_FORMAT_RGB || format == OB_FORMAT_BGR) {
uint8_t* data = (uint8_t*)videoFrame->getData();
imCV = cv::Mat(height, width, CV_8UC3, data);
if (format == OB_FORMAT_RGB) {
cv::cvtColor(imCV, imCV, cv::COLOR_RGB2BGR);
}
// Resize image for better performance (smaller size for faster processing)
cv::resize(imCV, imCV, cv::Size(640, 360));
// Add small delay to prevent overwhelming the system
std::this_thread::sleep_for(std::chrono::milliseconds(10));
}
}
// Process depth frame
auto depthFrame = frameSet->getFrame(OB_FRAME_DEPTH);
if (depthFrame != nullptr) {
auto videoFrame = depthFrame->as<ob::VideoFrame>();
uint32_t width = videoFrame->getWidth();
uint32_t height = videoFrame->getHeight();
uint8_t* data = (uint8_t*)videoFrame->getData();
// Convert to OpenCV Mat (depth is 16-bit)
depthCV = cv::Mat(height, width, CV_16U, data);
// Resize depth image for better performance (smaller size for faster processing)
cv::resize(depthCV, depthCV, cv::Size(640, 360));
}
timestamp_image = new_timestamp_image;
image_ready = true;
} catch (const ob::Error& e) {
std::cerr << "Error processing frames: " << e.what() << std::endl;
}
lock.unlock();
cond_image_rec.notify_all();
}
int main(int argc, char **argv)
{
if(argc != 3)
{
cerr << endl << "Usage: ./rgbd_orbbec_gemini2_cpp path_to_vocabulary path_to_settings" << endl;
return 1;
}
// Check if vocabulary file exists
if (strcmp(argv[1], "-") == 0) {
cerr << "Vocabulary file not found." << endl;
exit(-1);
}
// Check if settings file exists
if (strcmp(argv[2], "-") == 0) {
cerr << "Settings file not found." << endl;
exit(-1);
}
try {
// Create pipeline using C++ API
pipeline = std::make_shared<ob::Pipeline>();
cout << "✓ Pipeline created successfully" << endl;
// Get device info
auto device = pipeline->getDevice();
if (device) {
auto deviceInfo = device->getDeviceInfo();
cout << "✓ Device name: " << deviceInfo->getName() << endl;
cout << "✓ Device serial: " << deviceInfo->getSerialNumber() << endl;
}
// Create config
config = std::make_shared<ob::Config>();
// Enable color stream
config->enableVideoStream(OB_STREAM_COLOR, OB_WIDTH_ANY, OB_HEIGHT_ANY, OB_FPS_ANY, OB_FORMAT_RGB);
cout << "✓ Color stream enabled" << endl;
// Enable depth stream
config->enableVideoStream(OB_STREAM_DEPTH, OB_WIDTH_ANY, OB_HEIGHT_ANY, OB_FPS_ANY, OB_FORMAT_Y16);
cout << "✓ Depth stream enabled" << endl;
// Start pipeline with callback
pipeline->start(config, orbbec_frame_callback);
cout << "✓ Orbbec Gemini 2 pipeline started successfully!" << endl;
} catch (const ob::Error& e) {
cerr << "Failed to initialize Orbbec SDK: " << e.what() << endl;
return -1;
} catch (const std::exception& e) {
cerr << "Exception during initialization: " << e.what() << endl;
return -1;
}
// Create SLAM system
ORB_SLAM3::System SLAM(argv[1], argv[2], ORB_SLAM3::System::RGBD, true, 0, "");
float imageScale = SLAM.GetImageScale();
double timestamp;
cv::Mat im, depth;
double t_resize = 0.f;
double t_track = 0.f;
cout << "Starting SLAM system..." << endl;
// Main loop
while (!SLAM.isShutDown())
{
{
std::unique_lock<std::mutex> lk(imu_mutex);
if (!image_ready)
cond_image_rec.wait(lk);
if (count_im_buffer > 1)
cout << count_im_buffer - 1 << " dropped frames\n";
count_im_buffer = 0;
timestamp = timestamp_image;
im = imCV.clone();
depth = depthCV.clone();
image_ready = false;
}
if (imageScale != 1.f)
{
int width = im.cols * imageScale;
int height = im.rows * imageScale;
cv::resize(im, im, cv::Size(width, height));
cv::resize(depth, depth, cv::Size(width, height));
}
// Pass the image to the SLAM system
SLAM.TrackRGBD(im, depth, timestamp);
}
cout << "System shutdown!" << endl;
// Cleanup
if (pipeline) {
pipeline->stop();
cout << "✓ Pipeline stopped" << endl;
}
return 0;
}
Passo 7. Compile o ORB-SLAM3
chmod +x build.sh
./build.sh
Calibração da Câmera
Antes de executar o ORB-SLAM3, é necessário calibrar a Câmera para obter a configuração de parâmetros da câmera. Aqui, demonstramos o uso da ferramenta de calibração de câmera fornecida pelo ROS para calibrar a câmera e obter seus parâmetros.
Passo 1. Instale o Orbbec ROS2 Driver
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone https://github.com/orbbec/OrbbecSDK_ROS2.git
# Install dependencies
sudo apt install libgflags-dev nlohmann-json3-dev \
ros-$ROS_DISTRO-image-transport ros-${ROS_DISTRO}-image-transport-plugins \
ros-${ROS_DISTRO}-compressed-image-transport ros-$ROS_DISTRO-image-publisher \
ros-$ROS_DISTRO-camera-info-manager ros-$ROS_DISTRO-diagnostic-updater \
ros-$ROS_DISTRO-diagnostic-msgs ros-$ROS_DISTRO-statistics-msgs \
ros-$ROS_DISTRO-backward-ros libdw-dev
# Install udev rules
cd ~/ros2_ws/src/OrbbecSDK_ROS2/orbbec_camera/scripts
sudo bash install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
# Build
cd ~/ros2_ws/
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
# Source and launch
source ./install/setup.bash
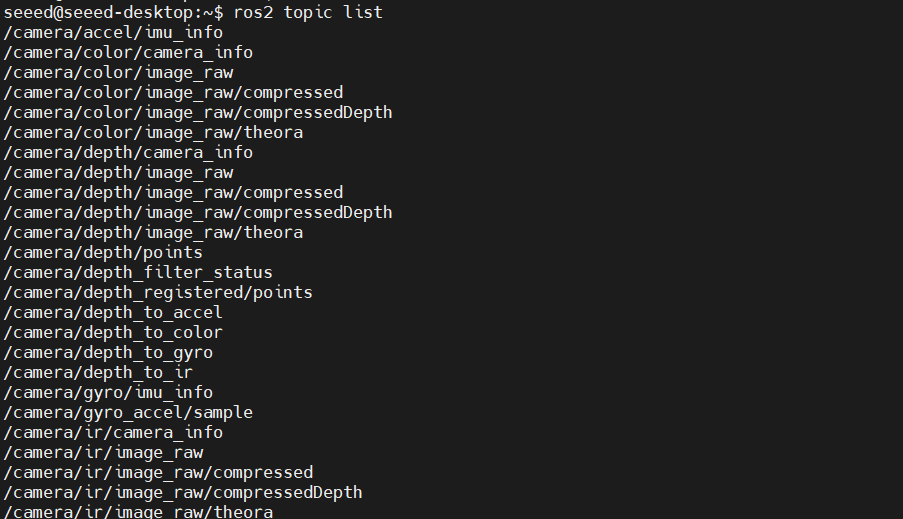
ros2 launch orbbec_camera gemini2.launch.py
Você pode verificar se o nó da câmera consegue iniciar normalmente observando se o tópico de dados da câmera está sendo publicado normalmente.
Passo 2. Instalar o Pacote de Calibração de Câmera
sudo apt install ros-humble-camera-calibration
Passo 3. Baixar o Tabuleiro de Calibração (Checkerboard)
Baixe o tabuleiro de calibração (checkerboard) em Checkerboard Collection e imprima-o.
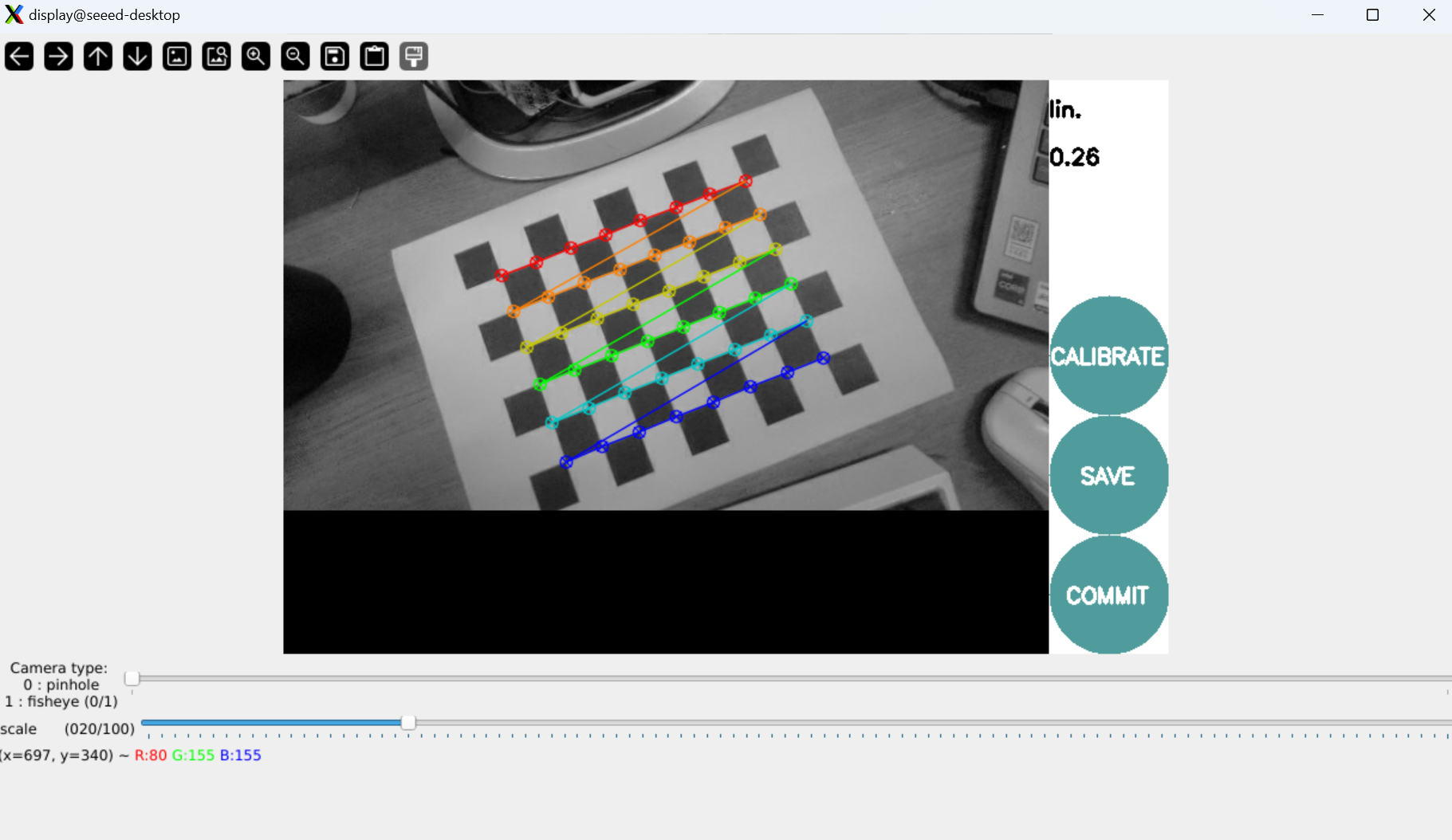
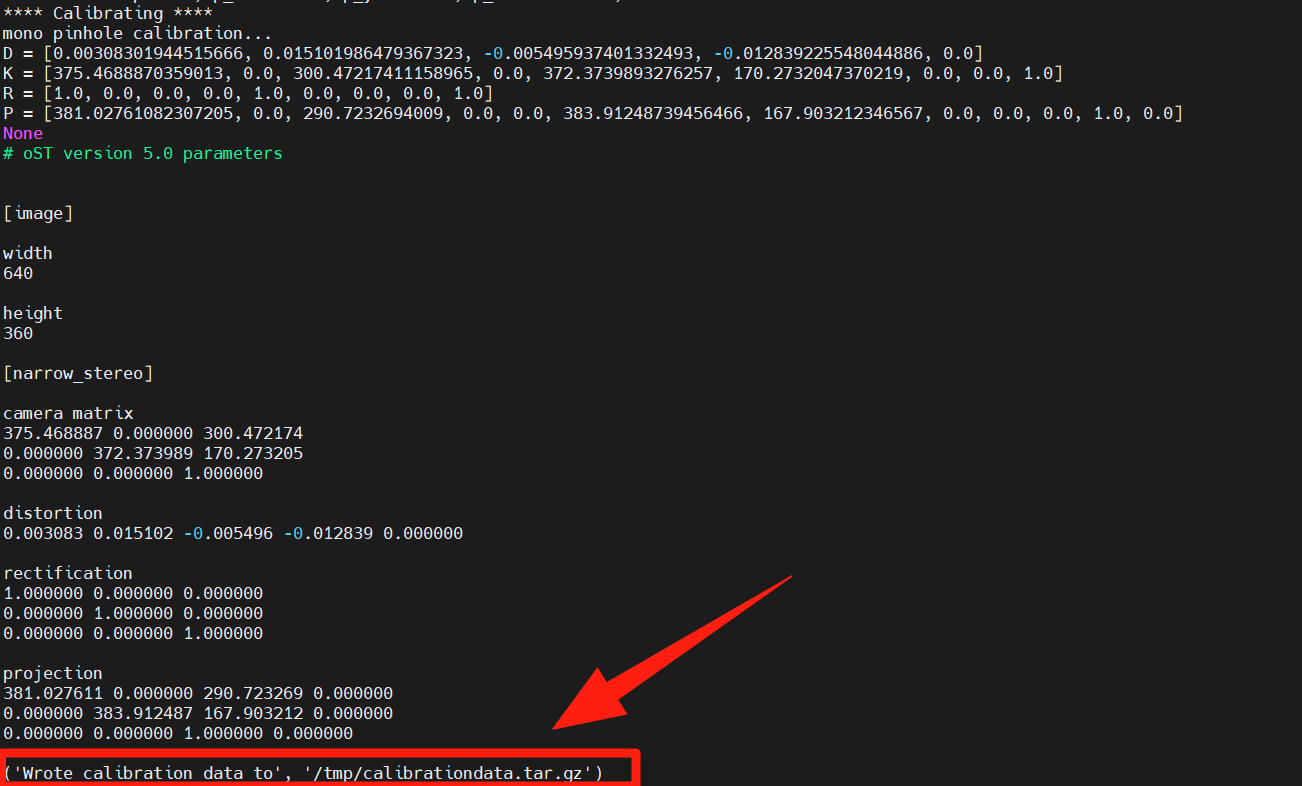
Passo 4. Executar a Calibração da Câmera
# For 8x6 checkerboard with 25mm squares
ros2 run camera_calibration cameracalibrator --size 8x6 --square 0.025 \
--ros-args --remap image:=/camera/color/image_raw --remap camera:=/camera/color
--size 8x6refere-se ao número de cantos internos (8×6 = 48 cantos para uma grade 9×7)--square 0.025refere-se ao tamanho do quadrado em metros (25mm)- Mova a câmera para capturar imagens de diferentes ângulos
Colete imagens de diferentes ângulos, calcule automaticamente os parâmetros da câmera e salve os dados de calibração em uma tooltip.
Passo 5. Configurar o arquivo YAML da câmera
Crie um arquivo de configuração de parâmetros configuration.yaml chamado Orbbec_Gemini2.yaml para a câmera Orbbec Gemini2 na pasta Examples/RGB-D/ do seu projeto ORB-SLAM3.
Orbbec_Gemini2.yaml
%YAML:1.0
# --------------------------------------------------------------------------------------------
# Camera Parameters
# --------------------------------------------------------------------------------------------
File.version: "1.0"
Camera.type: "PinHole"
# Camera calibration and distortion parameters
Camera1.fx: 375.46889
Camera1.fy: 372.37399
Camera1.cx: 300.47217
Camera1.cy: 170.2732
# distortion parameters
Camera1.k1: 0.003083
Camera1.k2: 0.015102
Camera1.p1: -0.005496
Camera1.p2: -0.012839
Camera1.k3: 0.0
# Camera resolution
Camera.width: 640
Camera.height: 360
# Camera frames per second
Camera.fps: 30
# Color order of the images (0: BGR, 1: RGB)
Camera.RGB: 1
# Stereo/Depth 参数(如果是单目,可以不用)
Stereo.ThDepth: 40.0
Stereo.b: 0.0745
# Depth map scale
RGBD.DepthMapFactor: 1000.0
# --------------------------------------------------------------------------------------------
# ORB Parameters
# --------------------------------------------------------------------------------------------
ORBextractor.nFeatures: 800
ORBextractor.scaleFactor: 1.2
ORBextractor.nLevels: 6
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
# --------------------------------------------------------------------------------------------
# Viewer Parameters
# --------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1.0
Viewer.GraphLineWidth: 0.9
Viewer.PointSize: 2.0
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3.0
Viewer.ViewpointX: 0.0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -3.5
Viewer.ViewpointF: 500.0
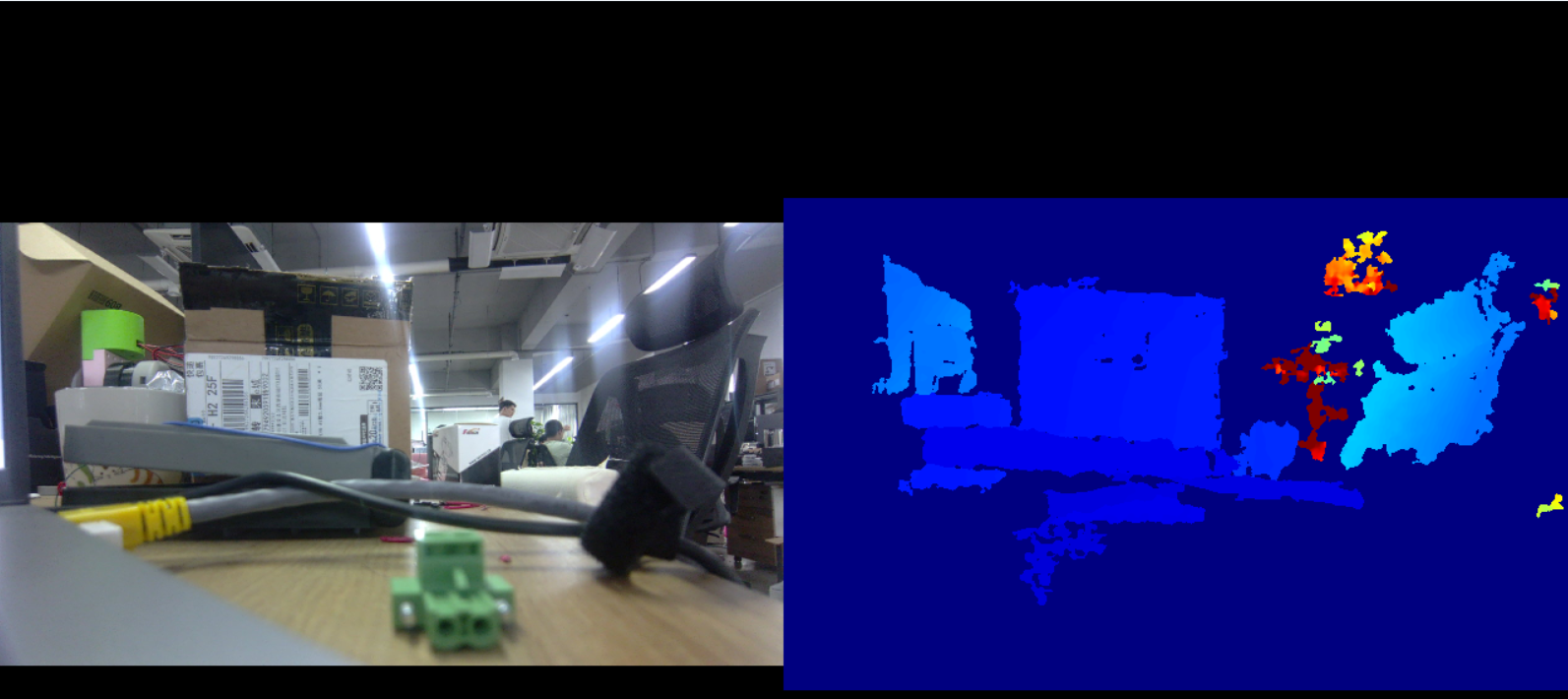
Executando o ORB-SLAM3
# Set Library Path
export LD_LIBRARY_PATH=/usr/local/lib:$LD_LIBRARY_PATH
# Run RGB-D mode slam
./Examples/RGB-D/rgbd_orbbec_gemini2 Vocabulary/ORBvoc.txt Examples/RGB-D/Orbbec_Gemini2.yaml
Recursos
Suporte Técnico & Discussão de Produtos
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.