Câmera 3D Orbbec Gemini2

A compacta câmera 3D Gemini 2 é baseada na tecnologia Active Stereo IR e é equipada com o mais recente ASIC personalizado da Orbbec para processamento de profundidade de alta qualidade, IMU e alimentação + conectividade por um único cabo USB 3.0. O amplo campo de visão (FOV) e a grande faixa de detecção de profundidade tornam a Gemini 2 adaptável a muitas aplicações, especialmente em robótica. É fácil de configurar e operar com o Orbbec SDK e fornece dados extremamente precisos e confiáveis em várias condições de iluminação, desde escuridão total até ambientes semiexternos.
Recursos
- Active Stereo IR Utiliza tecnologia Active Stereo IR para saída de profundidade, permitindo saída de dados precisa e confiável em várias condições de iluminação
- Ampla faixa de detecção Fornece saída de dados de profundidade de qualidade de 0,15 m a 10 m
- Amplo FOV Fornece dados de amplo campo de visão com 91 graus na horizontal e 66 graus na vertical
- Sincronização de várias câmeras Suporta sincronização de várias câmeras tanto para imagem de profundidade quanto para imagem RGB
- Conexão USB Usa um único cabo USB 3.0 Type-C para alimentação e conectividade
Especificações
| Parâmetros | Detalhes |
| Tensão | 5V (USB Type-C) |
| Tecnologia de profundidade | Active Stereo IR |
| Temperatura de operação | 0°C ~ 40°C |
| Dimensões mecânicas | 90mm x 25mm x 30mm |
| Interface de comunicação | USB 3.0 Type-C |
| Driver da câmera | UVC |
| Faixa de profundidade | 0,15 m ~ 10 m |
| Faixa ideal | 0,2 m ~ 5 m |
| Resolução de profundidade | Até 1280x800 @ 30fps |
| Resolução RGB | Até 1920x1080 @ 30fps |
| FOV horizontal | 91° |
| FOV vertical | 66° |
Visão geral de hardware



Guia de início rápido da Série Gemini
-
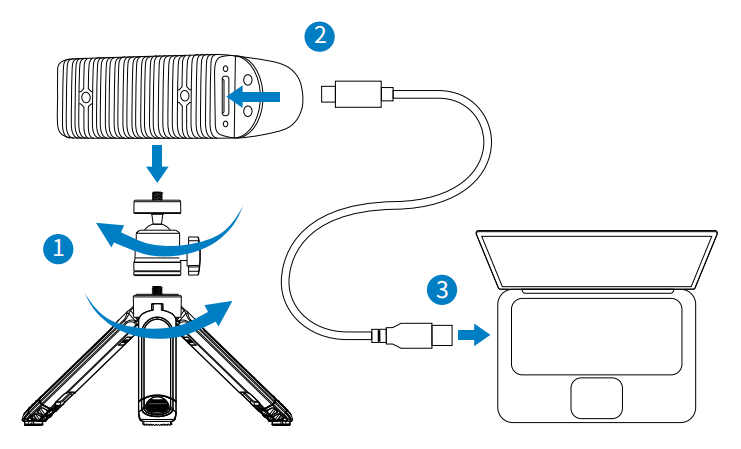
Conectar a câmera Orbbec ① Monte a cabeça do tripé no tripé e, em seguida, fixe a câmera no tripé montado, conforme ilustrado na Etapa 1 abaixo.
② Use o cabo USB-C para USB-A para conectar a porta Type-C da câmera, como mostrado na Etapa 2 abaixo.
③ Conecte o conector USB-A ao host usando o mesmo cabo USB-C para USB-A, como mostrado na Etapa 3 abaixo.
- Obter o Orbbec Viewer
Selecione e baixe o Orbbec Viewer correspondente com base no seu sistema e versão.
- Iniciar o Orbbec Viewer
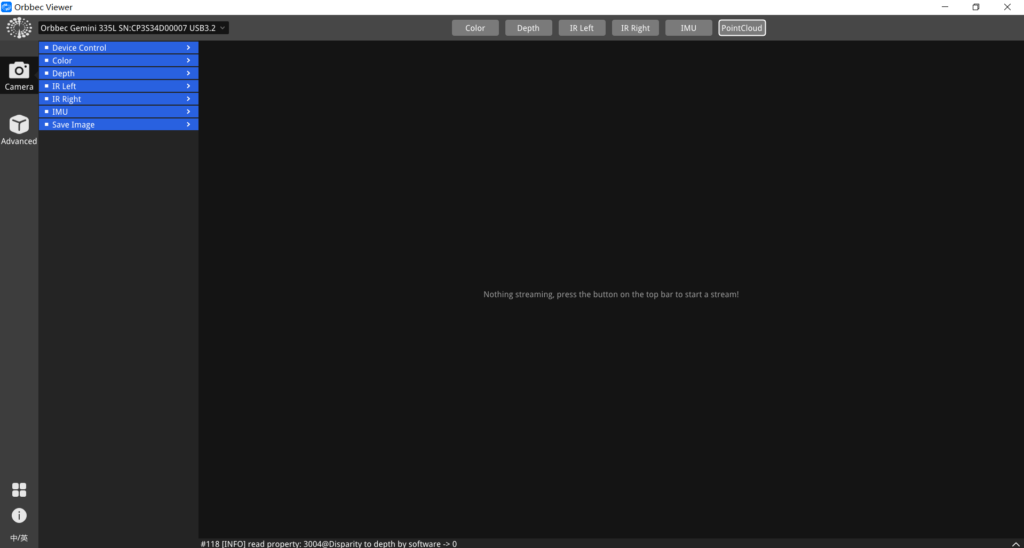
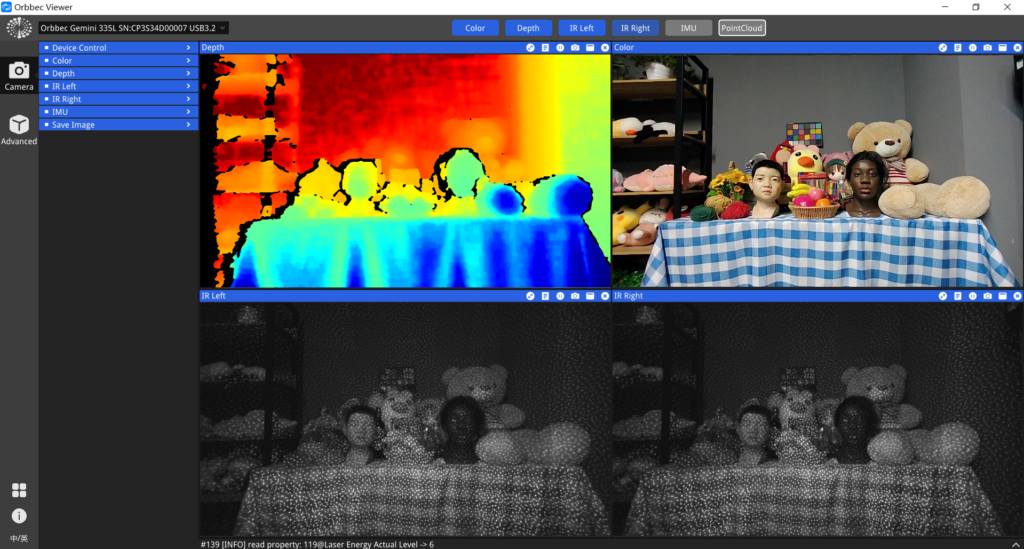
- Após iniciar o Orbbec Viewer, certifique-se de que a ferramenta reconhece a câmera 3D, conforme indicado na imagem a seguir. 【Observação】Se a câmera não for reconhecida, verifique se a câmera e o host estão conectados corretamente. Você pode tentar desconectar e reconectar o cabo USB. Se ainda não for reconhecida, considere substituir o cabo USB ou verificar se a fonte de alimentação do computador host atende às especificações necessárias.
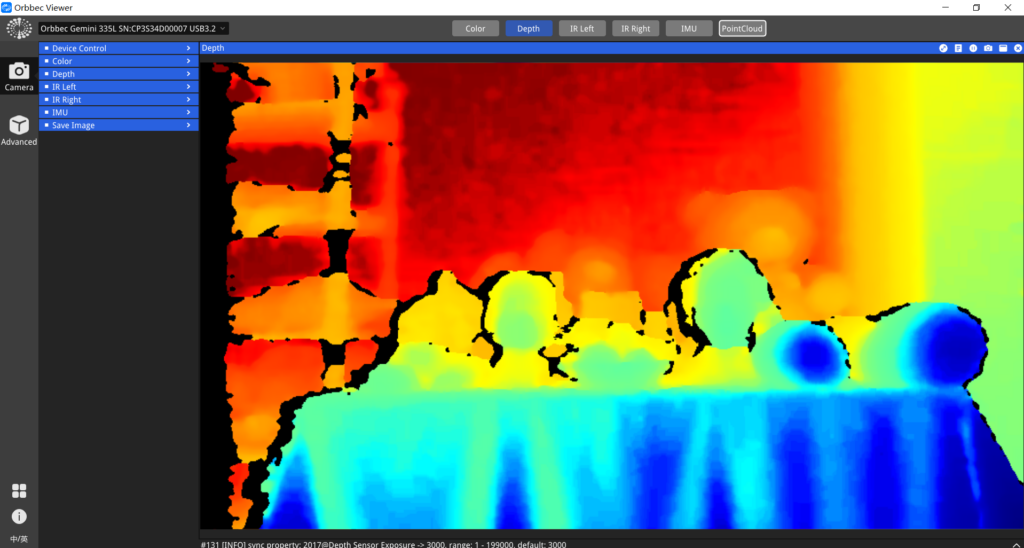
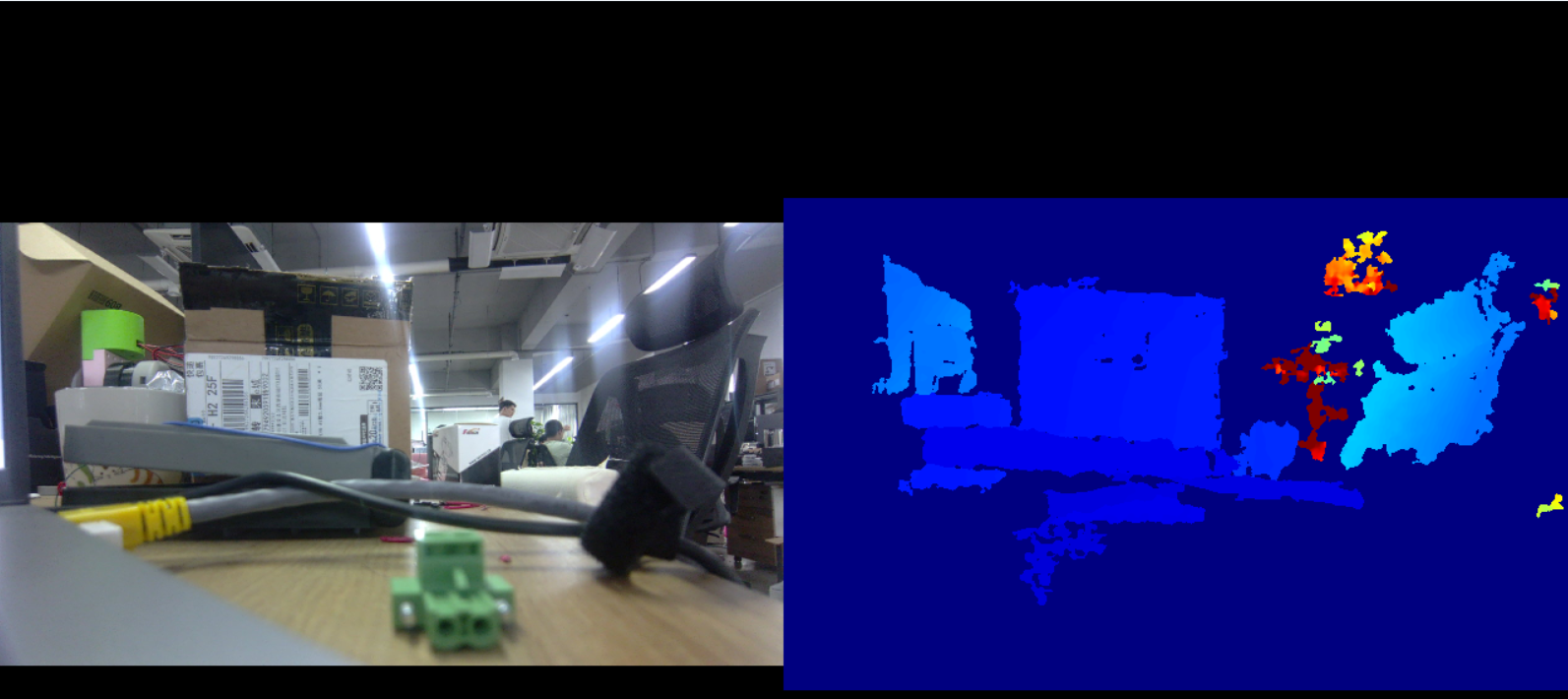
- Alterne o botão ‘Depth’ na parte superior da ferramenta para iniciar e visualizar o fluxo de profundidade.
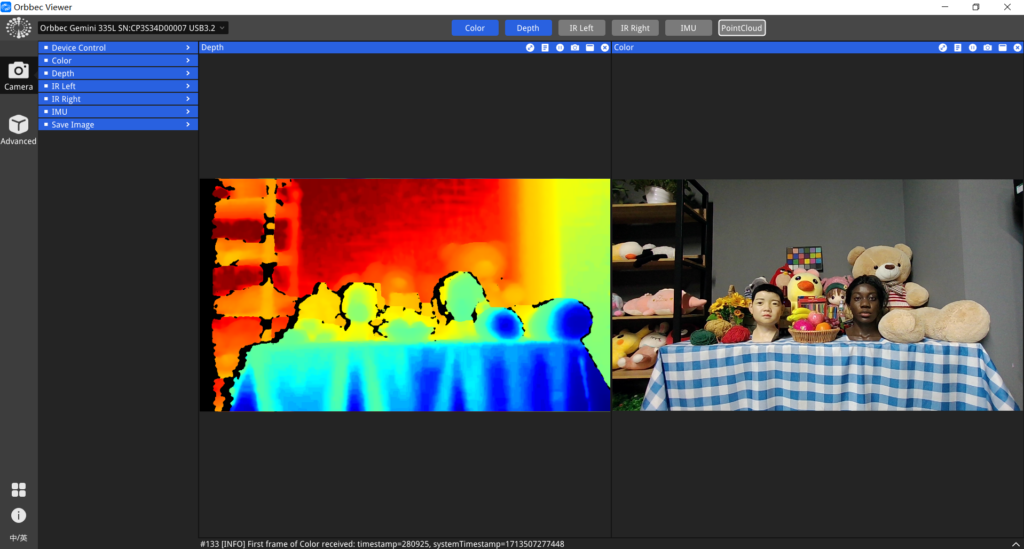
- Alterne o botão ‘Color‘ na parte superior da ferramenta para iniciar e visualizar o fluxo de cor. O fluxo de cor e o fluxo de profundidade serão exibidos lado a lado.
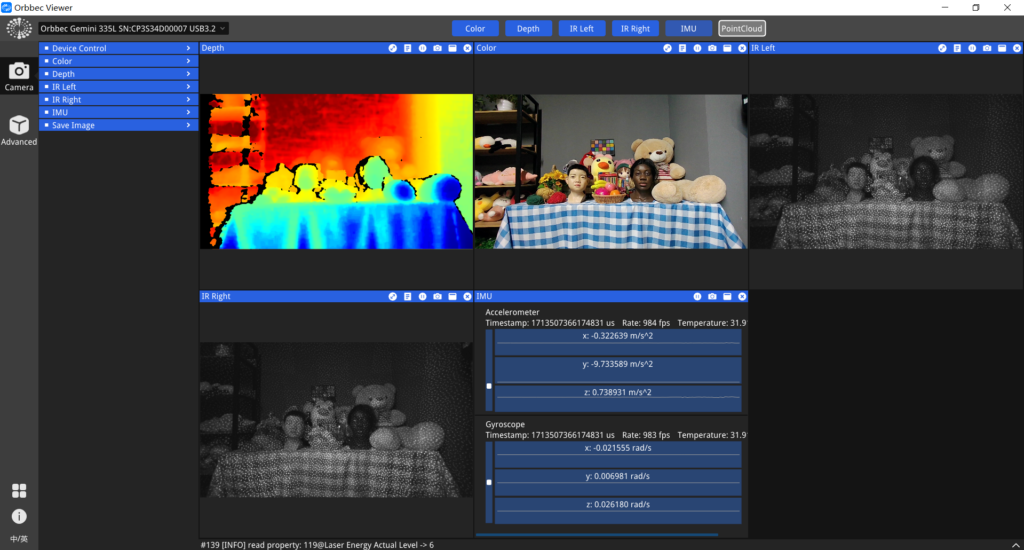
- Alterne os botões ‘IR Left’ e ‘IR Right’ na parte superior da ferramenta para iniciar e visualizar o fluxo IR.
- Alterne o botão ‘IMU’ na parte superior da ferramenta para iniciar e visualizar o fluxo de IMU.
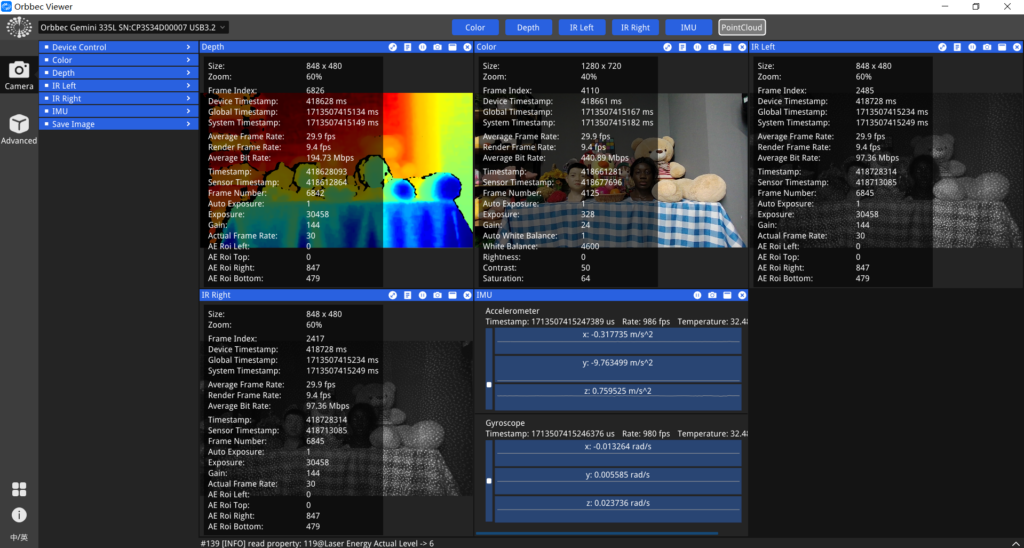
- Alterne o botão na parte superior de cada janela para mostrar as informações de metadados.
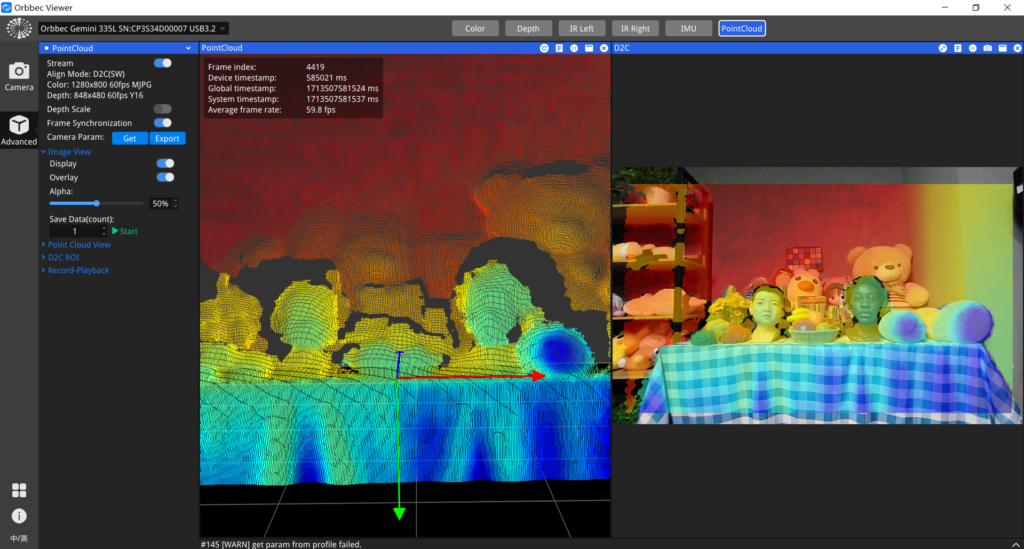
- Alterne o botão ‘PointCloud‘ na parte superior da ferramenta para iniciar e visualizar a nuvem de pontos 3D
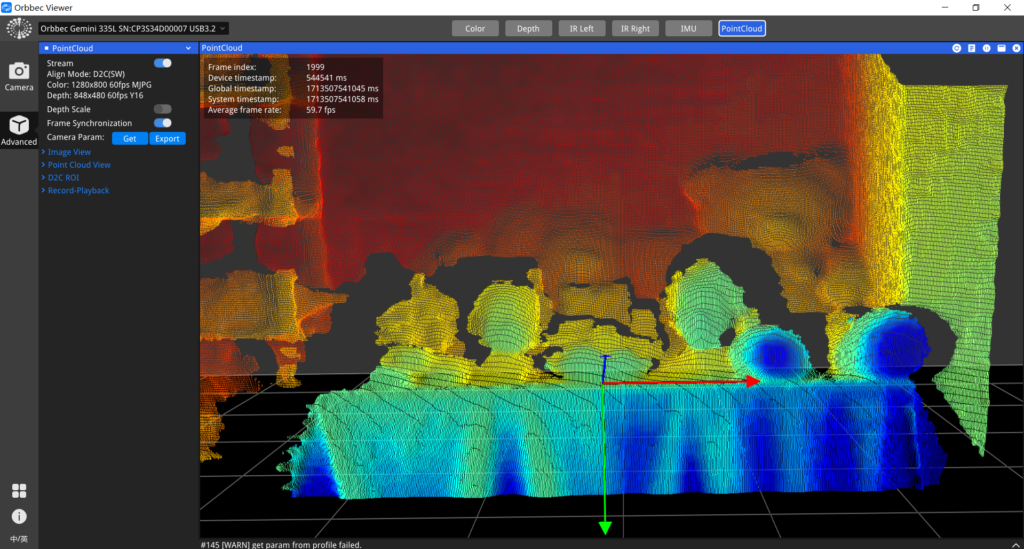
- Alterne o botão ‘Display’ sob o menu ‘Image View’ à esquerda para iniciar e visualizar o fluxo D2C (registro de profundidade para cor). A nuvem de pontos 3D e o fluxo D2C serão exibidos lado a lado.
Começando no reComputer
Passo 1. Baixe e instale o Orbbec SDK para arquitetura ARM64:
# Download Orbbec SDK
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.11/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
# Unzip the SDK
unzip OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
Passo 2. Compile os exemplos e teste:
# Install udev rules
cd OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64/shared/
sudo chmod +x ./install_udev_rules.sh
sudo ./install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
# Build examples and setup
cd ..
./build_examples.sh
./setup.sh
Exemplo de aplicações
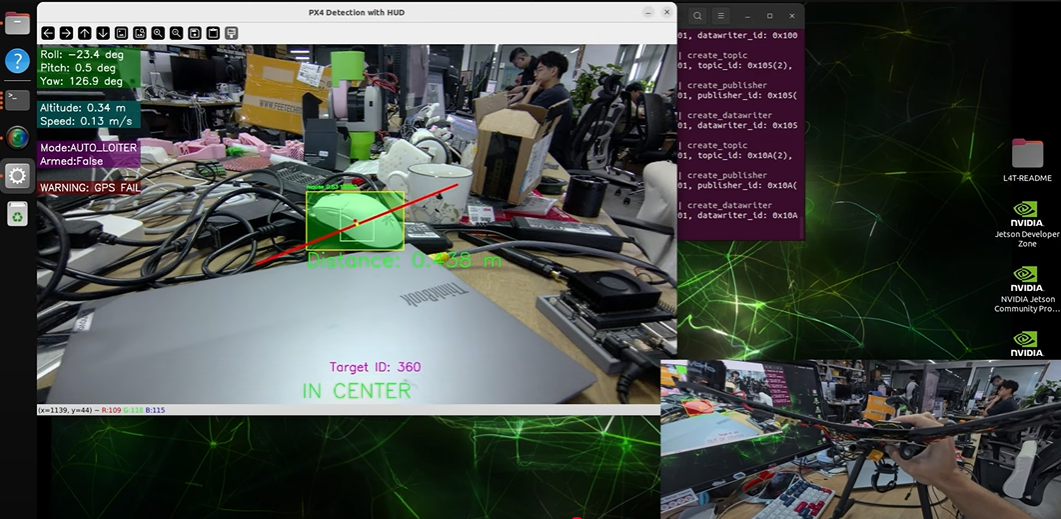
A Orbbec Gemini2 é uma câmera de profundidade compacta e de alto desempenho, ideal para robótica, visão 3D, rastreamento de objetos e automação industrial. Ela se encaixa perfeitamente em aplicações de IA embarcada e computação de borda, como aquelas nas plataformas NVIDIA Jetson.
Existem alguns tutoriais de casos desenvolvidos por nós usando a Gemini2:
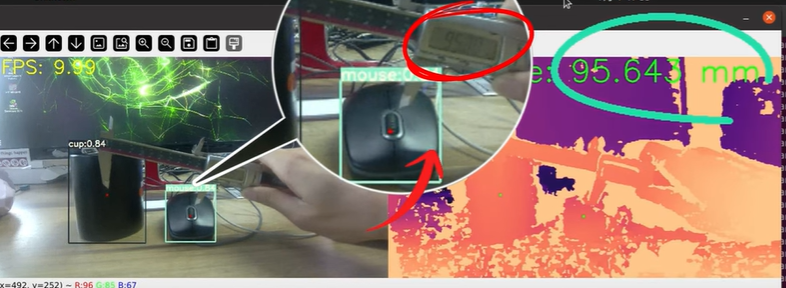
Rastreamento de objetos em drone
Recursos
Suporte Técnico e Discussão de Produtos
Obrigado por escolher nossos produtos! Estamos aqui para oferecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.