Câmera Estéreo Orbbec Gemini 335Lg

O Gemini 335Lg é um modelo de destaque da série Gemini 330, servindo como a versão GMSL2/FAKRA do comprovado Gemini 335L na indústria.
O serializador GMSL2 combinado com o conector FAKRA garante conectividade segura e confiável para robôs móveis autônomos (AMRs) que navegam em ambientes complexos e braços robóticos que exigem cabeamento flexível.
Especificações
| Categoria | Especificação | Gemini 335Lg |
|---|---|---|
| Básico | Ambiente de uso | Ambiente interno e externo |
| Tecnologia | Estéreo ativo e passivo | |
| Linha de base | 95mm | |
| Conexão de dados | GMSL2 FAKRA e USB 3 | |
| Protocolo da câmera | USB e GMSL 2 | |
| Compatível com UVC | Sim | |
| SDK | Orbbec SDK | |
| Profundidade | Faixa de profundidade [1] | 0.17m - 20m+ |
| Faixa ideal | 0.25m - 6m | |
| Resolução de profundidade / taxa de quadros | Up to: 1280 × 800 @ 30fps; 848 × 480 @ 60fps | |
| FOV de profundidade (H × V) | 90° × 65° ± 3° @ 2m | |
| FOV de profundidade (H × V) com D2C | Up to: 90° × 65° ± 3° @ 2m | |
| Precisão espacial [2] | ≤0.8% @ 2m; ≤1.6% @ 4m | |
| Tecnologia do sensor de profundidade | Obturador global | |
| Filtro de profundidade | Passa visível + NIR | |
| IR | Resolução IR / taxa de quadros | Up to: 1280 × 800 @ 30fps; 848 × 480 @ 60fps |
| FOV IR (H × V) | 91° × 65° ± 3° | |
| RGB | Resolução RGB / taxa de quadros | Up to 1280 × 800 @ 60 FPS; 1280 × 720 @ 60 FPS |
| FOV do sensor RGB (H × V) | 94° × 68° ± 3° | |
| Tecnologia do sensor RGB | Obturador global | |
| Sensor integrado | IMU | Suporte |
| Elétrico | Consumo de energia | GMSL2: Average ≤ 3.8 W (Peak ≤ 7.5W); USB3: Average ≤ 3.0 W (Peak ≤ 6W) |
| Alimentação | GMSL2: For Best Performance, DC 12V/≥0.7A (Laser Energy Level 6); For Default Performance: DC 12V/≥0.5A [3] (Laser Energy Level 4); USB 3: DC 5V/≥1.5A | |
| Físico | Sincronização de hardware multicâmera | 8-pin & FAKRA-Z |
| Dimensões (L × A × P) | 124 mm × 29mm × 36 mm | |
| Peso | 164g ± 3g | |
| Proteção IP [4] | IP65 | |
| Instalação | Bottom: 1 × 1/4 - 20 UNC; BACK: 2 × M4 | |
| Ambiental | Temperatura ambiente | -10℃ - 50 ℃ @ 15 FPS; -10℃ - 45 ℃ @ 30/60 FPS |
| Requisitos de EMC | EN61000-6-2; EN610000-6-4 | |
| Vibração | 3.8Grms @ 5 ~ 500 Hz, random, 2hr/axis | |
| Outros | Vida útil [5] | 5 years |
[1] Alcance máximo teórico de profundidade de até 65 metros;
[2] Dados medidos durante a calibração de fábrica;
[3] O nível padrão de energia do laser do Gemini 335Lg é definido como Nível 4 para reduzir o consumo de pico de energia e evitar falhas operacionais. Quando houver energia suficiente disponível, os usuários podem ajustar manualmente o laser para o Nível máximo 6 para obter desempenho ideal;
[4] Tanto o Gemini 335L quanto o 335Lg exigem o uso de cabos compatíveis com IP65 durante a operação para alcançar proteção IP65;
[5] Não mais que 16h de operação por dia.
Configuração do Dispositivo
Neste tutorial, demonstramos conexões USB 3 e GMSL2. Especificação do dispositivo host:
- reComputer Robotics J4012 com GMSL
- JetPack 6.2 (Ubuntu 22.04)
Para tutoriais em Windows/Linux x86_64, ou MacOS (x86_64, potencialmente Apple Silicon), consulte o README do repositório SDK
Baixar e Instalar o Orbbec Viewer
- Abra um terminal no seu dispositivo Jetson e baixe o pacote pré-compilado do release no GitHub.
wget -L https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecSDK_v2.4.8_arm64.deb
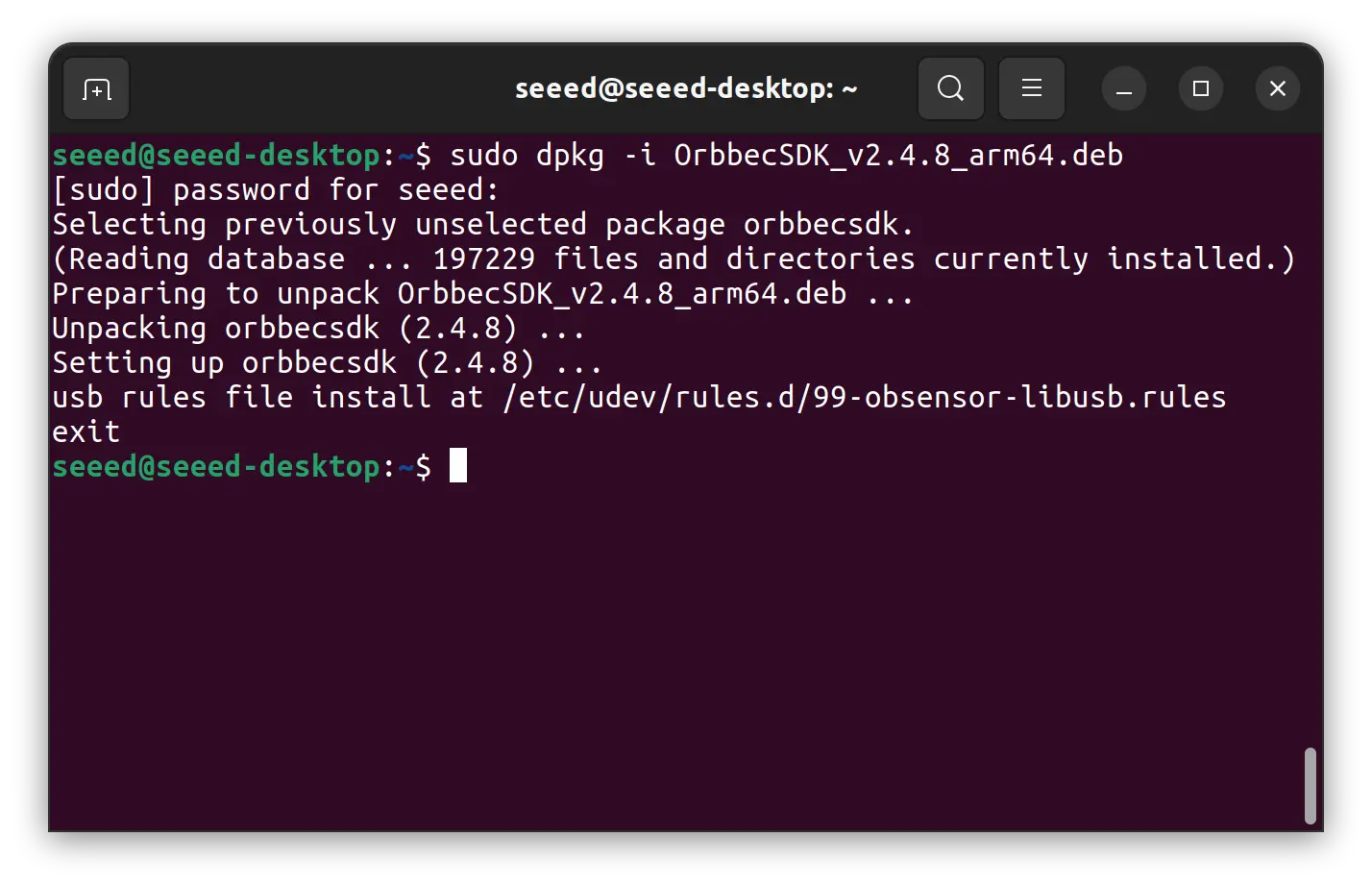
- Instalar o SDK
sudo dpkg -i OrbbecSDK_v2.4.8_arm64.deb
- Visualização usando o Orbbec Viewer, baixar
wget -L https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
- Extrair o conteúdo
# Caso você não tenha instalado 'unzip'
# sudo apt-get update && sudo apt-get install unzip
unzip OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
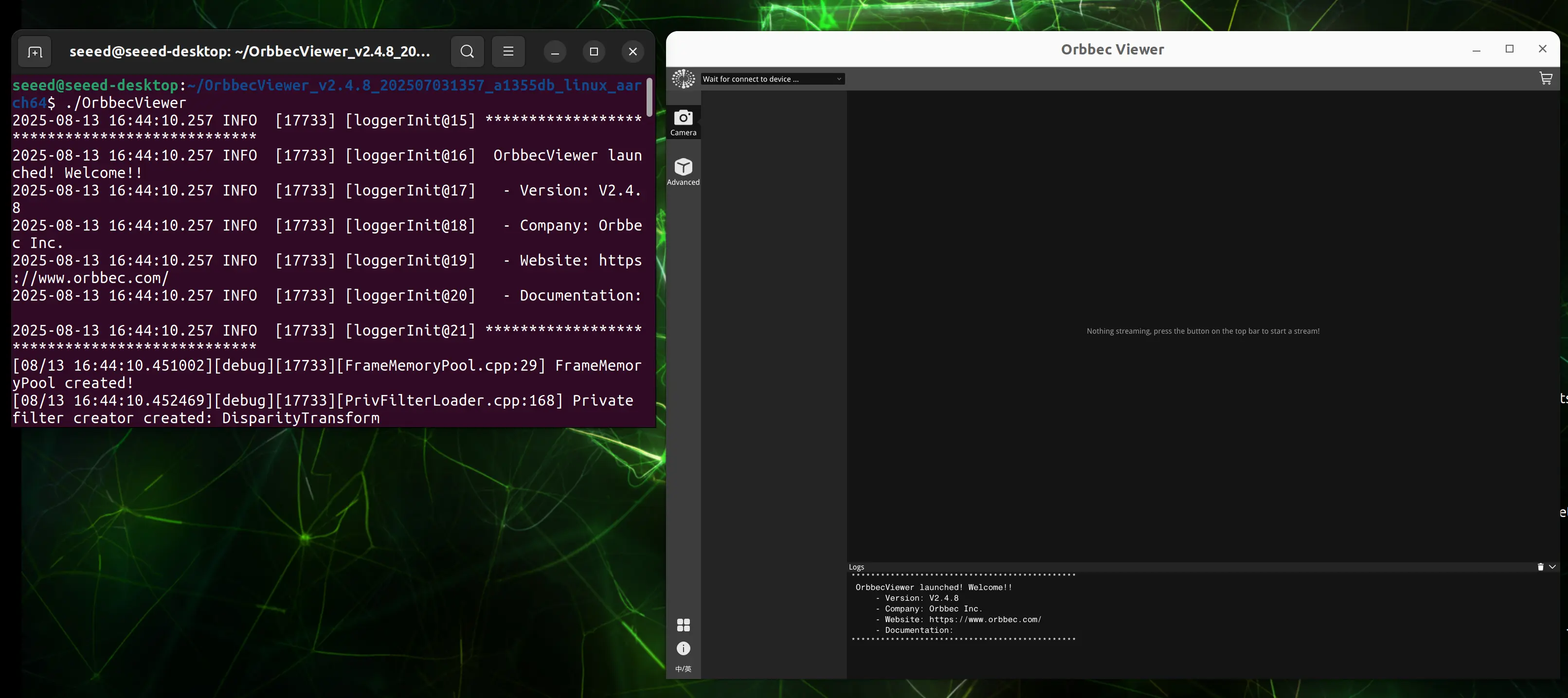
- Iniciar o Orbbec Viewer
cd OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64
./OrbbecViewer
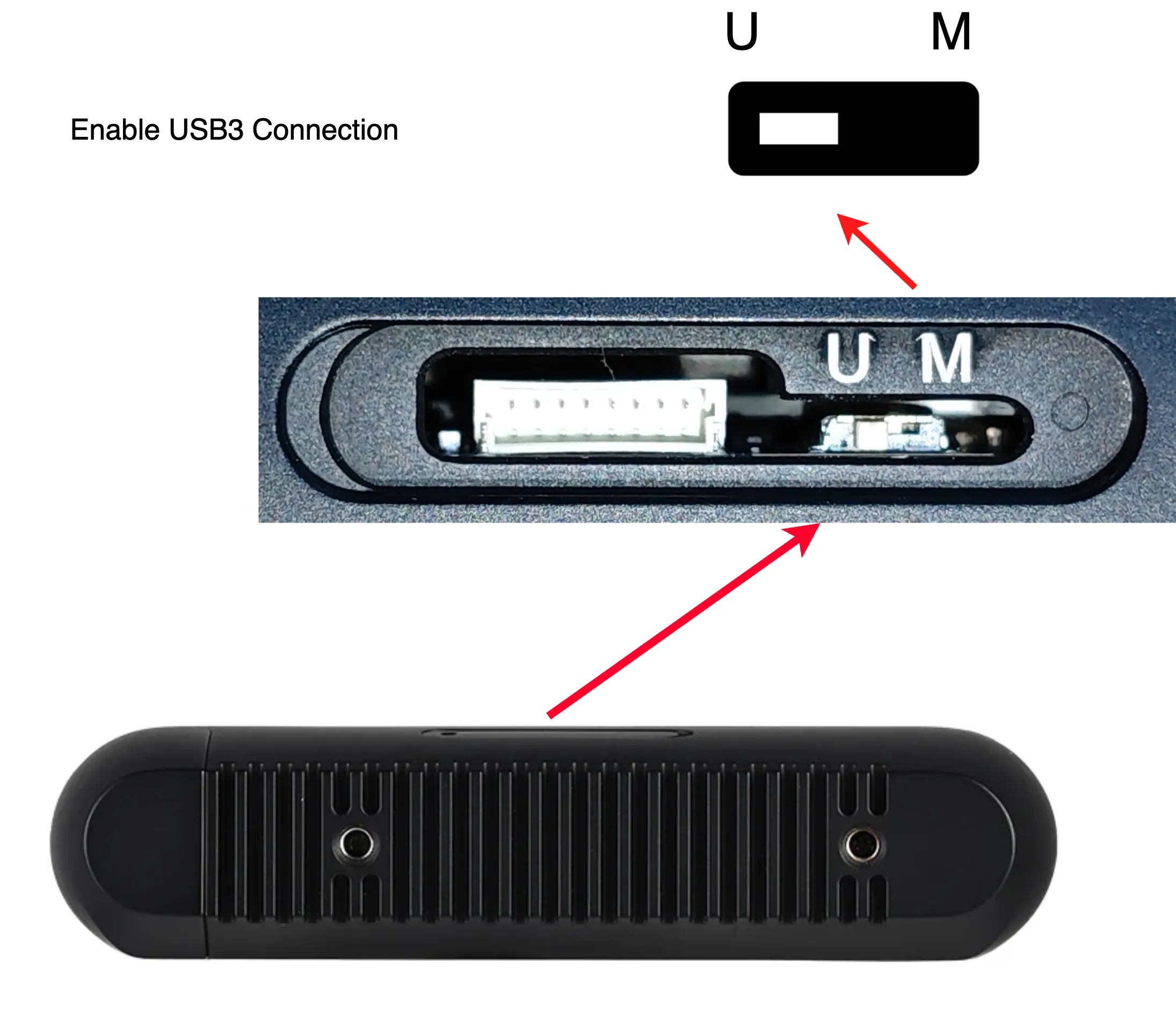
Conexão USB3
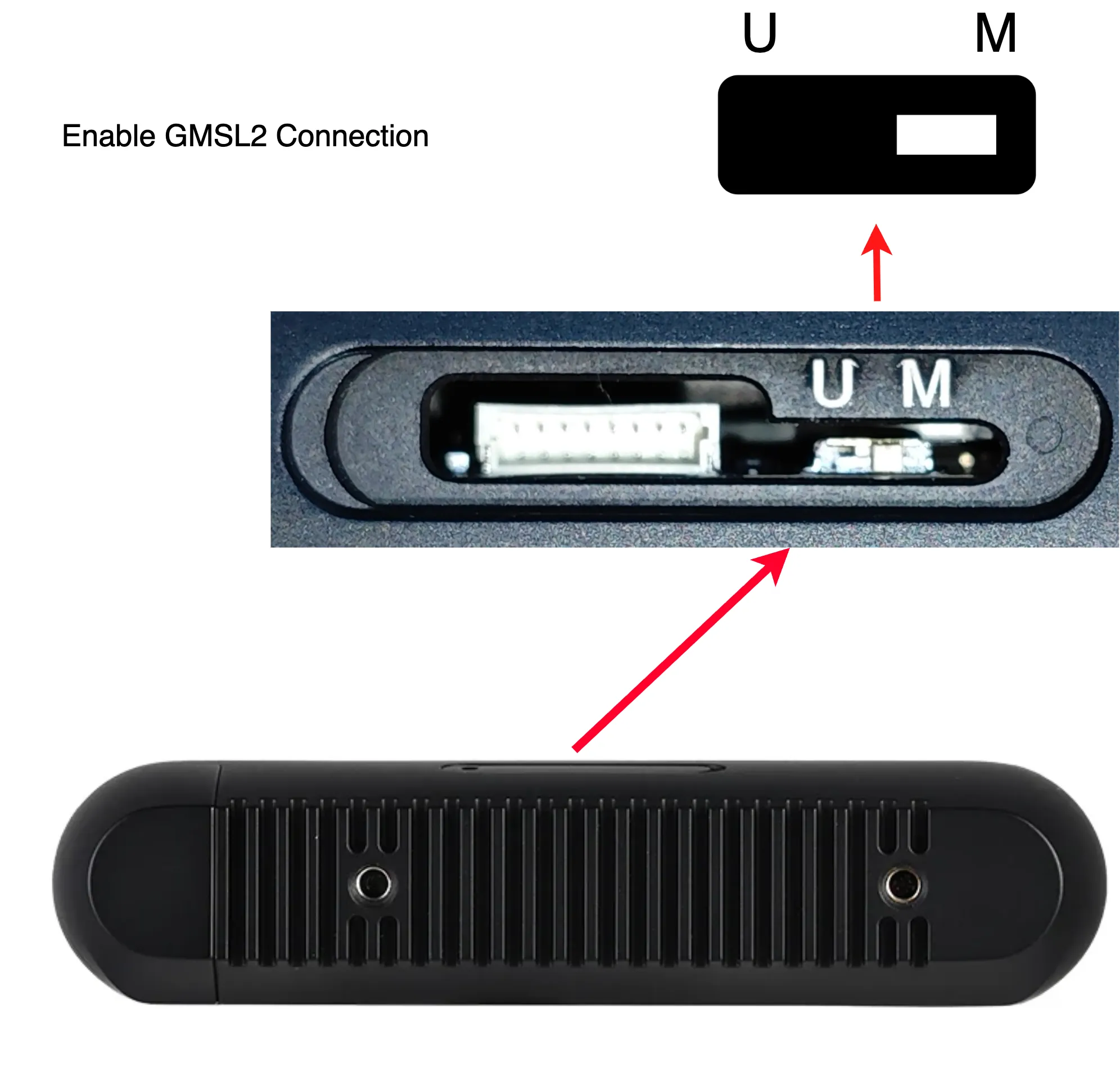
Defina o DIP switch na parte superior da câmera (remova primeiro a tampa metálica) para a posição da letra 'U'.
O que você pode precisar:
- Um cabo USB Type-C para USB Type-A que suporte o protocolo USB 3.
- Um dispositivo Jetson host que possua portas USB 3 Type-A.
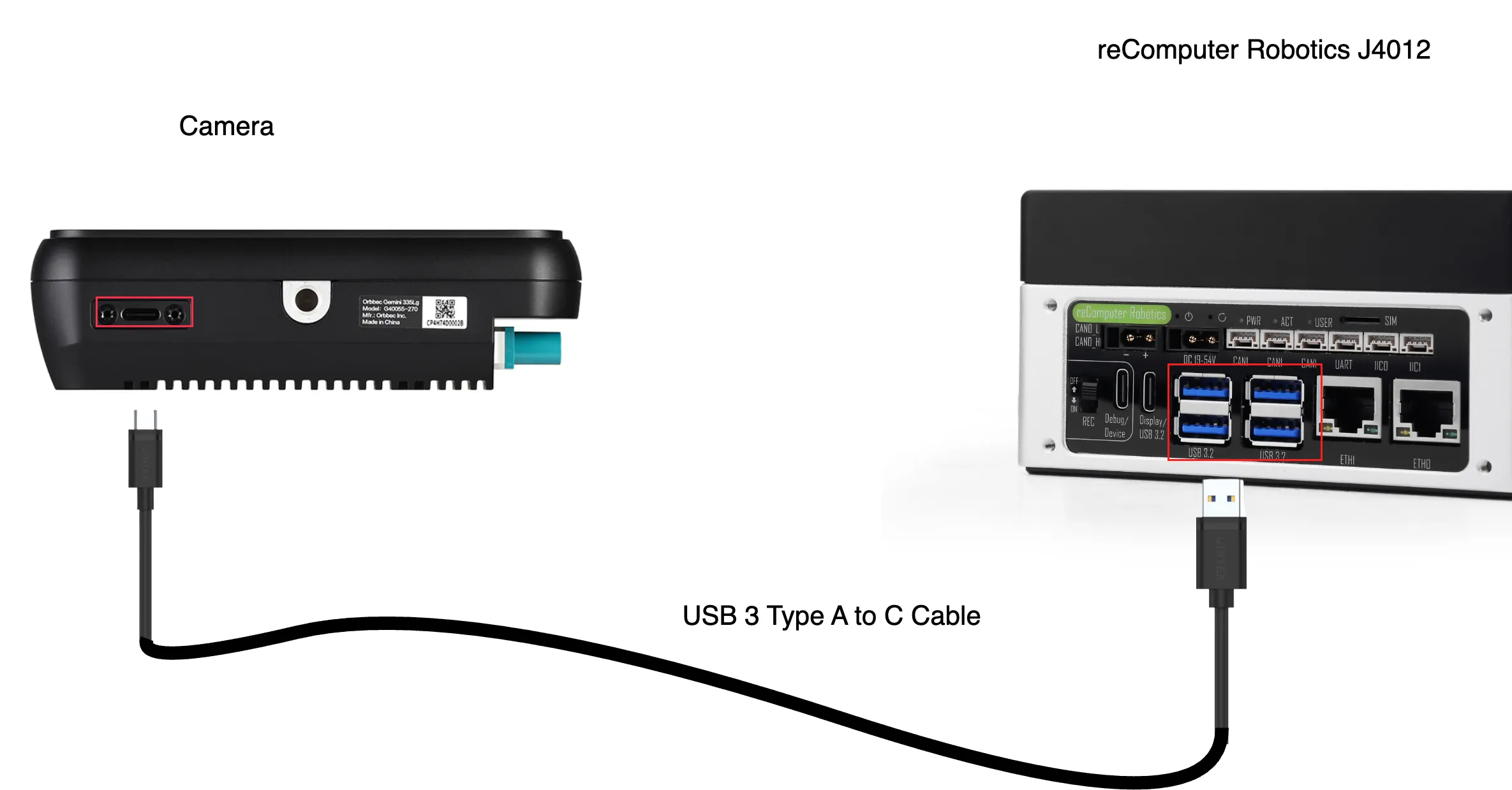
Conecte a câmera e utilize o OrbbecViewer para visualização.
Conexão GMSL2
Defina o DIP switch na parte superior da câmera (remova primeiro a tampa metálica) para a posição da letra 'M'.
O que você pode precisar:
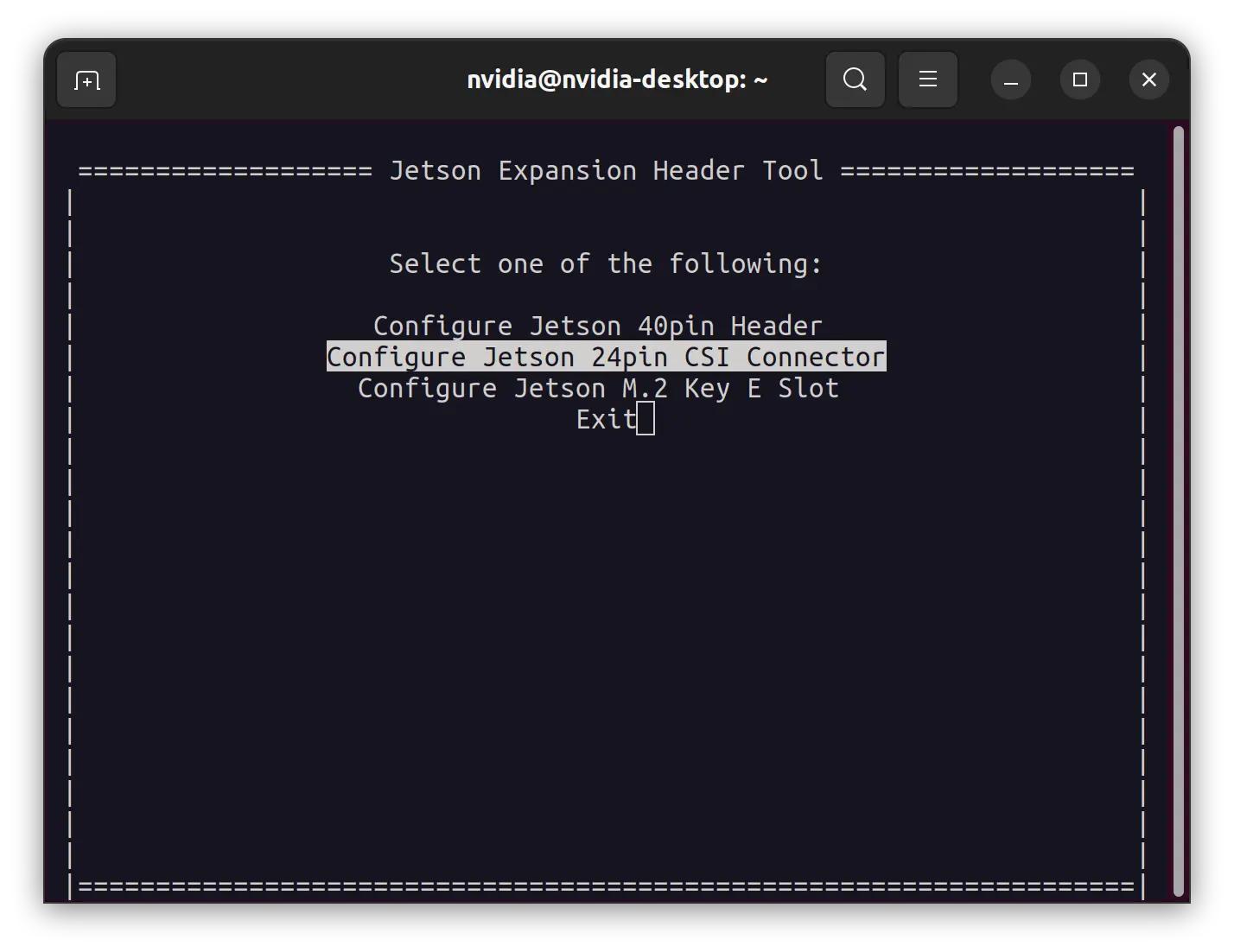
Conecte a câmera e inicie o Jetson IO no seu dispositivo com
sudo /opt/nvidia/jetson-io/jetson-io.py
E configure o overlay da árvore de dispositivos passo a passo:
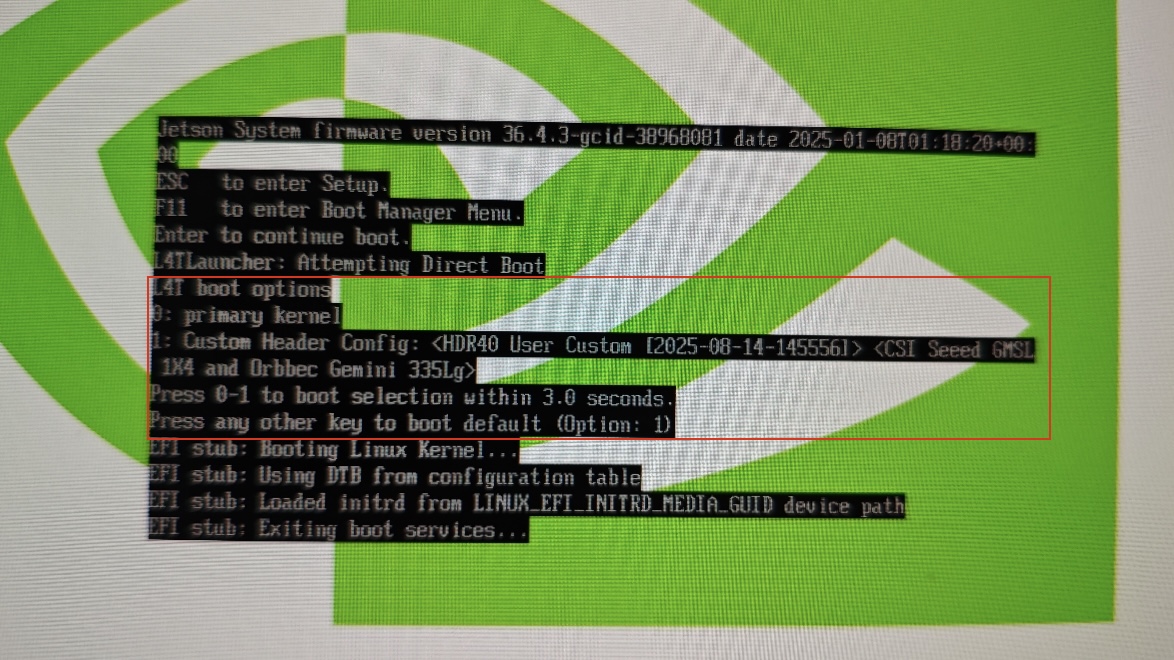
Reinicie o dispositivo Jetson. Na página de firmware do Jetson, você pode precisar selecionar a entrada correta conforme o prompt. No nosso caso, pressionamos '1' para usar Custom Header Config.
Conecte a câmera com o cabo Mini FAKRA.

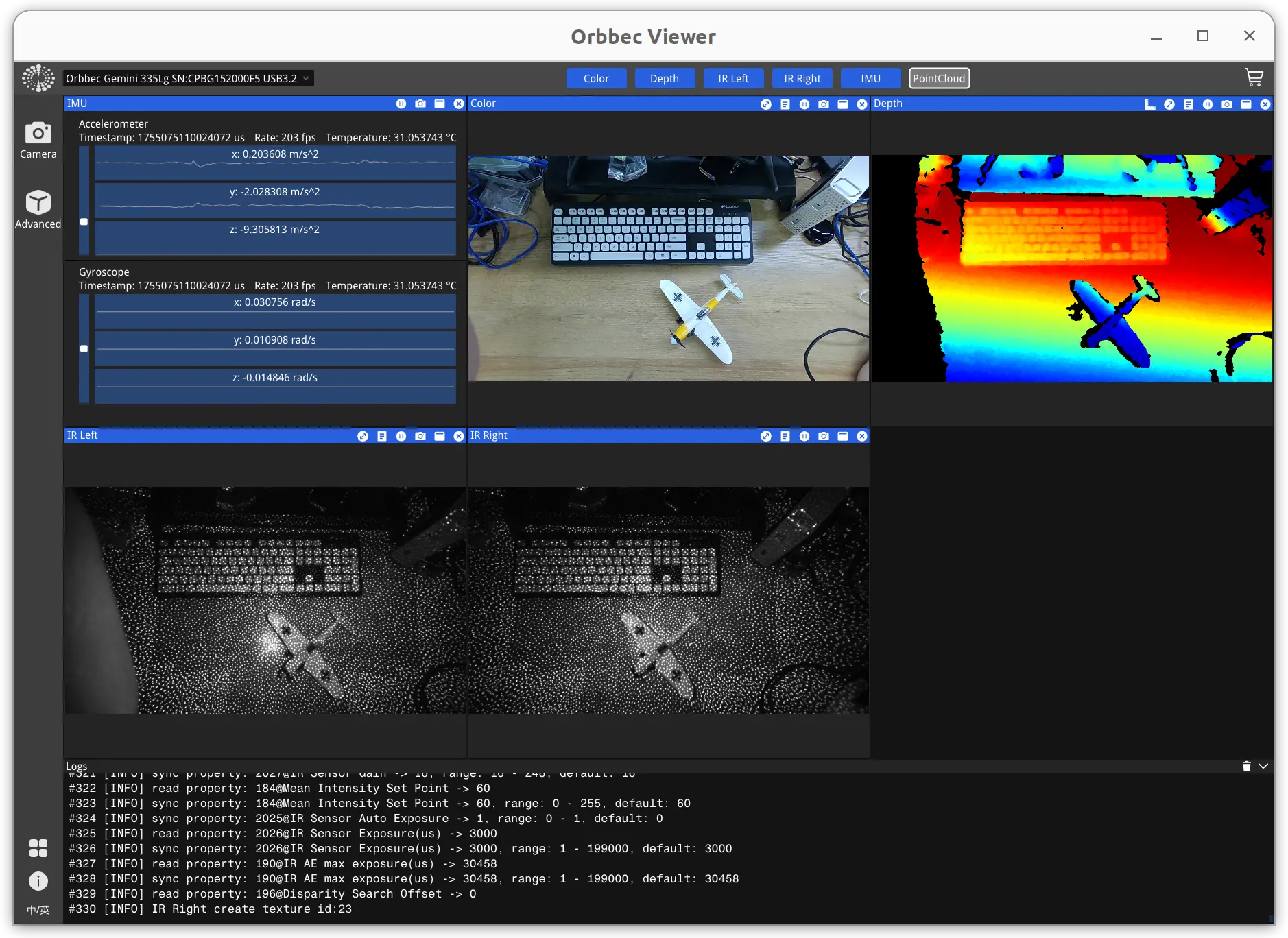
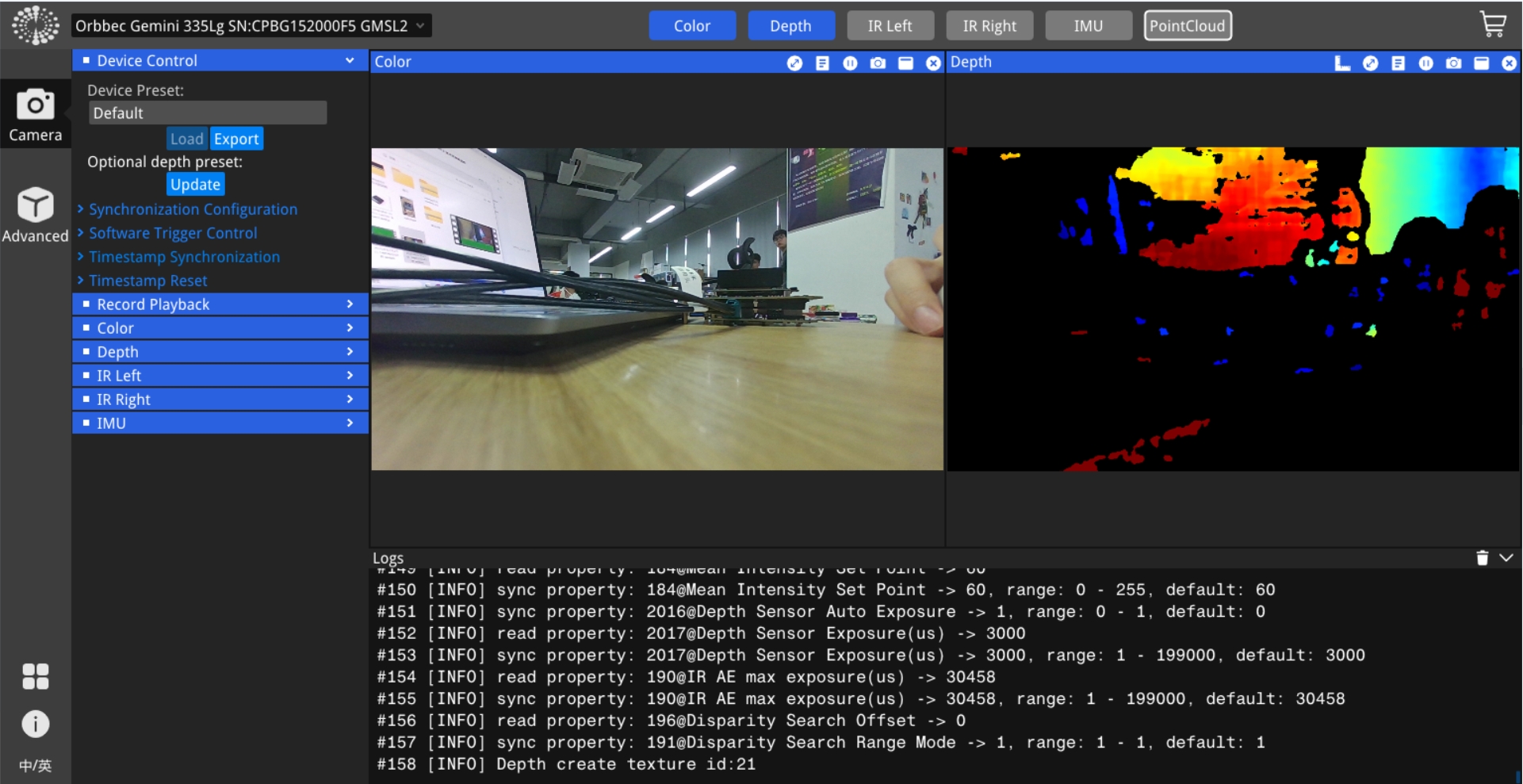
Visualize o resultado usando o OrbbecViewer
Recursos Adicionais
- Ficha técnica do Orbbec Gemini 335Lg
- CAD 2D da câmera (DWG)
- CAD 2D da câmera (PDF)
- Modelo 3D STP da câmera
Suporte Técnico e Discussão do Produto
Obrigado por escolher nossos produtos! Certifique-se de nos seguir nas plataformas abaixo para obter as últimas notícias e suporte.
