reTerminal DM CAN BUS com Node-RED
Informações breves sobre CAN BUS

CAN BUS & Node-RED
O barramento CAN (Controller Area Network bus) é um tipo de rede usada para conectar múltiplas unidades de controle eletrônico (ECUs) dentro de um veículo ou sistema industrial. Ele foi originalmente desenvolvido pela Bosch na década de 1980 e se tornou um padrão internacional (ISO 11898) para comunicação serial em veículos e outras aplicações.
O barramento CAN permite a troca de dados em alta velocidade entre as ECUs, permitindo que elas compartilhem informações e coordenem suas atividades. Ele usa um sistema de dois fios, com um fio para transmitir dados e o outro para receber dados, e suporta múltiplos nós, tornando-o ideal para uso em sistemas complexos onde muitos dispositivos precisam se comunicar entre si.
A tecnologia de barramento CAN é amplamente utilizada na indústria automotiva para uma variedade de aplicações, incluindo controle do motor, controle da transmissão, ABS (sistema de freios antibloqueio), controle de airbag e muitas outras. Ela também é usada em outros setores, como automação industrial, equipamentos médicos e aeroespacial, onde a comunicação confiável e eficiente entre dispositivos é essencial.
O barramento CAN possui muitas vantagens, incluindo alta confiabilidade, baixo custo e capacidade de operar em ambientes severos. É fácil de instalar e manter, e é altamente resistente a interferências eletromagnéticas. Essas características fazem dele uma escolha ideal para muitas aplicações diferentes em que é necessária comunicação confiável e eficiente.
Começando com o Node CAN BUS no reTerminal DM
Para usar o Node-RED com o barramento CAN, você precisará de um dispositivo de interface CAN que se conecte à porta CAN BUS do reTerminal DM e de um node CAN bus do Node-RED que permita enviar e receber mensagens na rede; neste caso, vamos explorar juntos os nodes node-red-contrib-socketcan. Depois de instalar o node CAN bus no Node-RED, você pode começar a criar fluxos que leem dados da rede CAN bus, os processam e os enviam para outros sistemas ou dispositivos. Por exemplo, você pode ler o RPM do motor a partir do barramento CAN de um veículo, processar os dados para calcular o consumo de combustível e enviar o resultado para um dashboard para exibição.
Você pode encontrar mais informações na página node-red-contrib-socketcan.
Se você estiver usando o Senscraft Edge OS, pode pular as etapas de instalação do node Socketcan.
Pré-requisitos
Hardware
- 1 x reTerminal DM
- 1 x Computador Host
- 1 x USB-CAN Analyzer
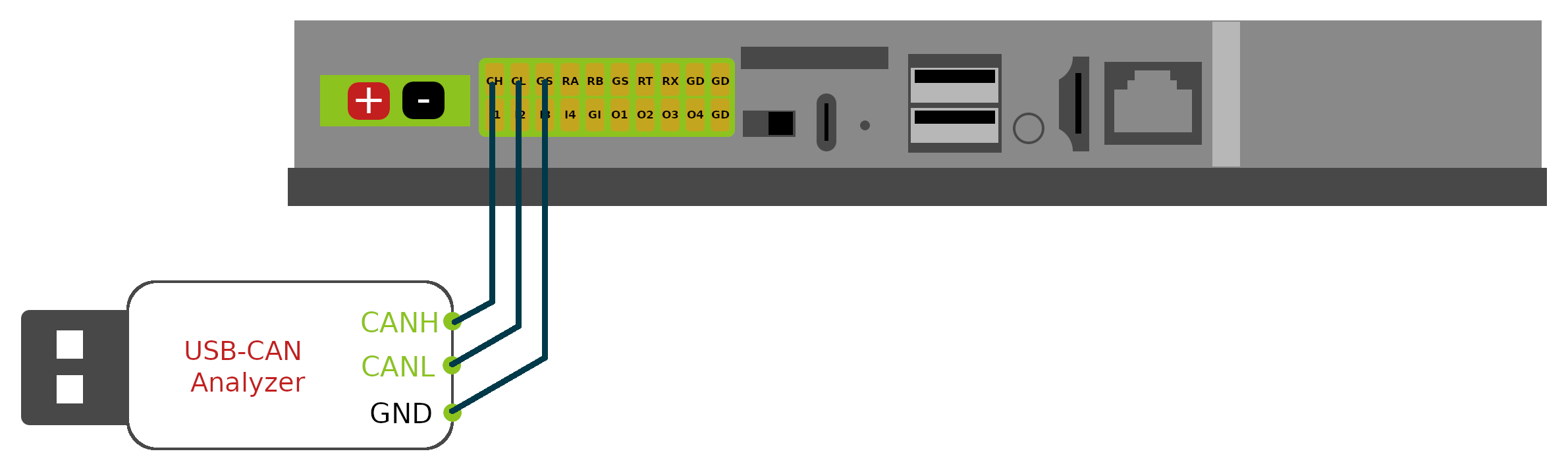
Preparação de hardware
Conecte o hardware conforme mostrado abaixo
Software
O Computador Host deve conseguir ter conexão à internet com o reTerminal DM para executar as etapas de configuração a seguir.
Instalar o Node Socketcan
Neste tutorial da Wiki vamos usar o node node-red-contrib-socketcan, então instale o node-red-contrib-socketcan seguindo o guia install nodes.
Configurar CAN BUS no reTerminal DM
Pressupõe-se que você tenha acesso direto ao app Terminal no reTerminal DM ou acesso ao reTerminal DM via SSH; caso contrário, siga a primeira etapa aqui para se familiarizar com o procedimento.
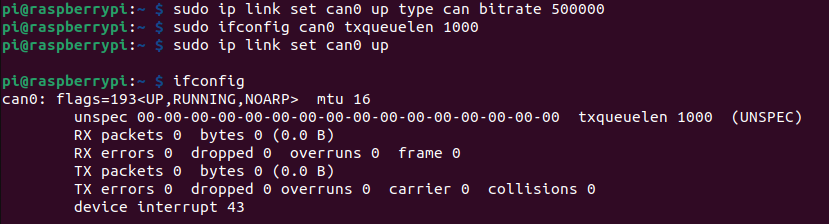
Digite um a um os seguintes comandos para habilitar um dispositivo CAN virtual chamado can0 com a porta CAN BUS no reTerminal DM.
sudo apt install can-utils
sudo ip link set can0 up type can bitrate 250000
sudo ifconfig can0 txqueuelen 1000
sudo ip link set can0 up
Após inserir os comandos acima, você deverá ver o dispositivo can0 com o comando ifconfig, conforme mostrado abaixo:
Configurar software e driver usb-can no computador host
Se você estiver usando o mesmo USB-CAN Analyzer, poderá seguir as etapas abaixo para configurar o driver de software para usar o analisador.
Visite o repositório do driver no GitHub USB-CAN Analyzer USB-CAN Analyzer system driver e siga a seção Readme para instalar o driver de acordo com seu sistema operacional.
Exemplo de comandos para enviar e receber tráfego CAN bus
# dump CAN bus traffic from CAN bus
$ ./canusb -t -d /dev/ttyUSB0 -s 250000 -t
# send the bytes 0x00112233 from ID 005 on at CAN bus
$ ./canusb -d /dev/ttyUSB0 -s 250000 -t -i 5 -j 00112233
Node Socketcan com reTerminal DM
Importar os fluxos
As etapas a seguir são apenas para fins de tutorial; nesta seção, vamos mostrar como importar rapidamente um fluxo copiando o fluxo em formato JSON e colando-o na caixa de entrada do menu pop-up de importação de nodes.
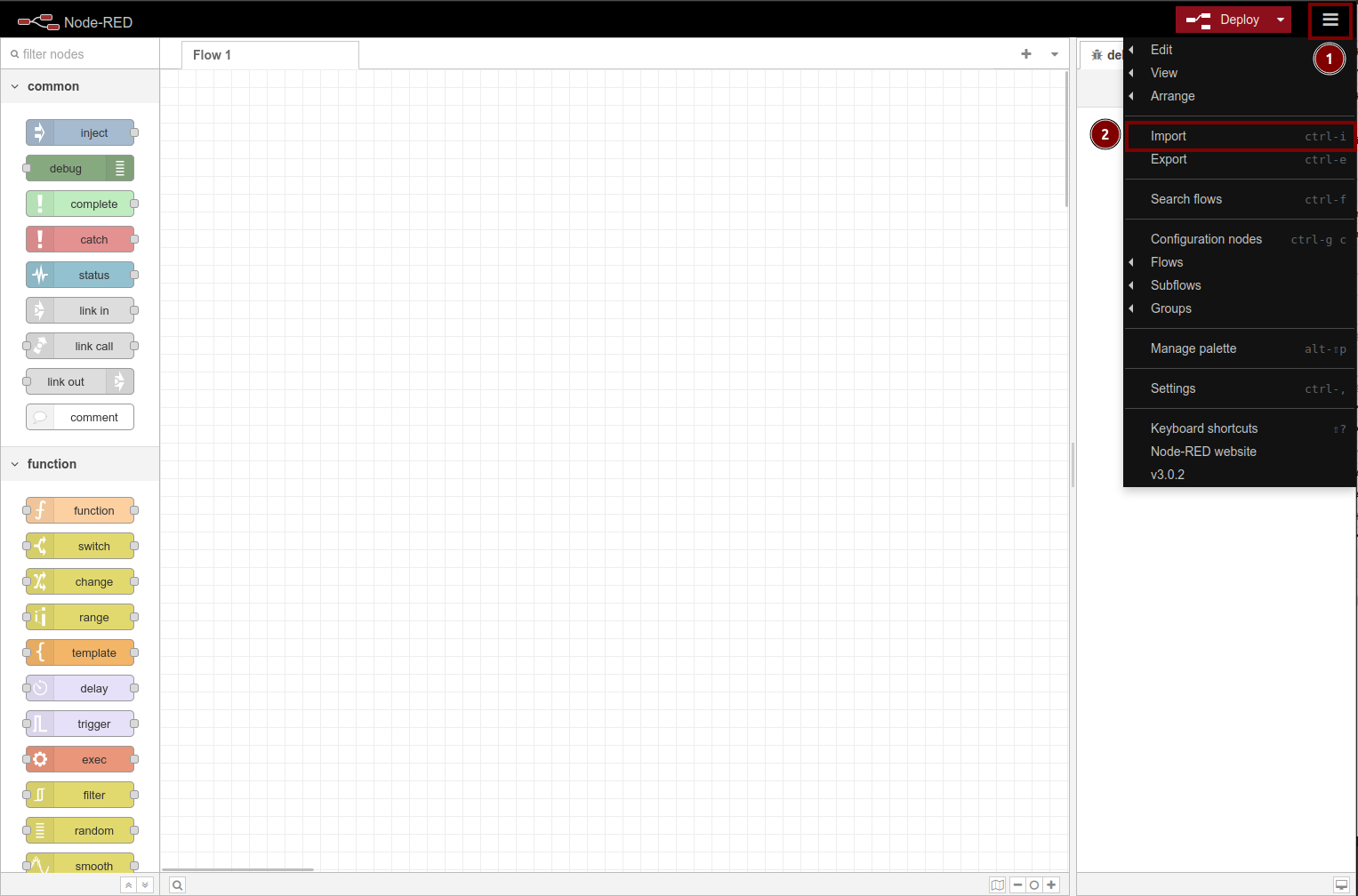
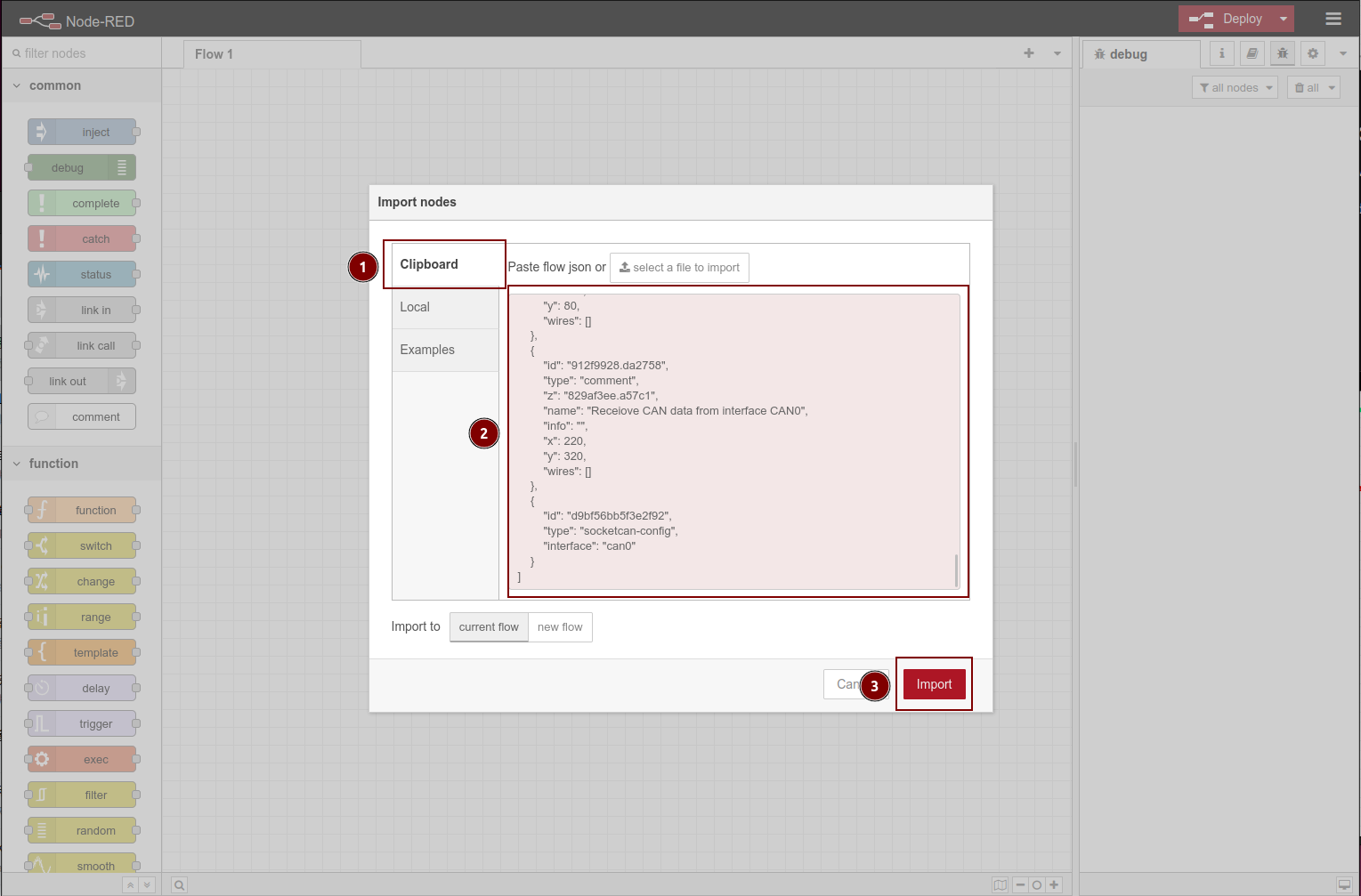
PASSO 1: Abra a janela Import nodes clicando no Setting Button e depois clicando no botão Import
PASSO 2: copie o seguinte fluxo JSON
[
{
"id": "829af3ee.a57c1",
"type": "tab",
"label": "CAN BUS",
"disabled": false,
"info": ""
},
{
"id": "7b24a62e.8f5458",
"type": "debug",
"z": "829af3ee.a57c1",
"name": "",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 350,
"y": 360,
"wires": []
},
{
"id": "5f671b29.cd24bc",
"type": "socketcan-out",
"z": "829af3ee.a57c1",
"name": "socketcan-out",
"config": "d9bf56bb5f3e2f92",
"x": 150,
"y": 360,
"wires": [
[
"7b24a62e.8f5458"
]
]
},
{
"id": "caba412f.047b2",
"type": "socketcan-in",
"z": "829af3ee.a57c1",
"name": "socketcan-in",
"config": "d9bf56bb5f3e2f92",
"x": 350,
"y": 120,
"wires": []
},
{
"id": "a64240cb.3f0788",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send object - std",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "{\"ext\":false,\"canid\":123,\"dlc\":5,\"data\":[1,2,3,4,5]}",
"payloadType": "json",
"x": 160,
"y": 120,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "3ff96369.ef6f5c",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send string - std",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "123#00112233",
"payloadType": "str",
"x": 160,
"y": 200,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "6879c00a.5edb68",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send string - ext",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "1F334455#1122334455667788",
"payloadType": "str",
"x": 160,
"y": 240,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "1ee3b274.4cb8fe",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send object - ext",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "{\"ext\":true,\"canid\":32278,\"dlc\":5,\"data\":[1,2,3,4,5]}",
"payloadType": "json",
"x": 160,
"y": 160,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "391a4c45.7acd8c",
"type": "comment",
"z": "829af3ee.a57c1",
"name": "Send CAN frames in using different payloads on CAN0",
"info": "",
"x": 260,
"y": 80,
"wires": []
},
{
"id": "912f9928.da2758",
"type": "comment",
"z": "829af3ee.a57c1",
"name": "Receiove CAN data from interface CAN0",
"info": "",
"x": 220,
"y": 320,
"wires": []
},
{
"id": "d9bf56bb5f3e2f92",
"type": "socketcan-config",
"interface": "can0"
}
]
ETAPA 3: Na janela Import nodes, selecione a aba Clipboard e então cole o código de fluxo json acima na caixa de diálogo vermelha, depois clique no botão import.
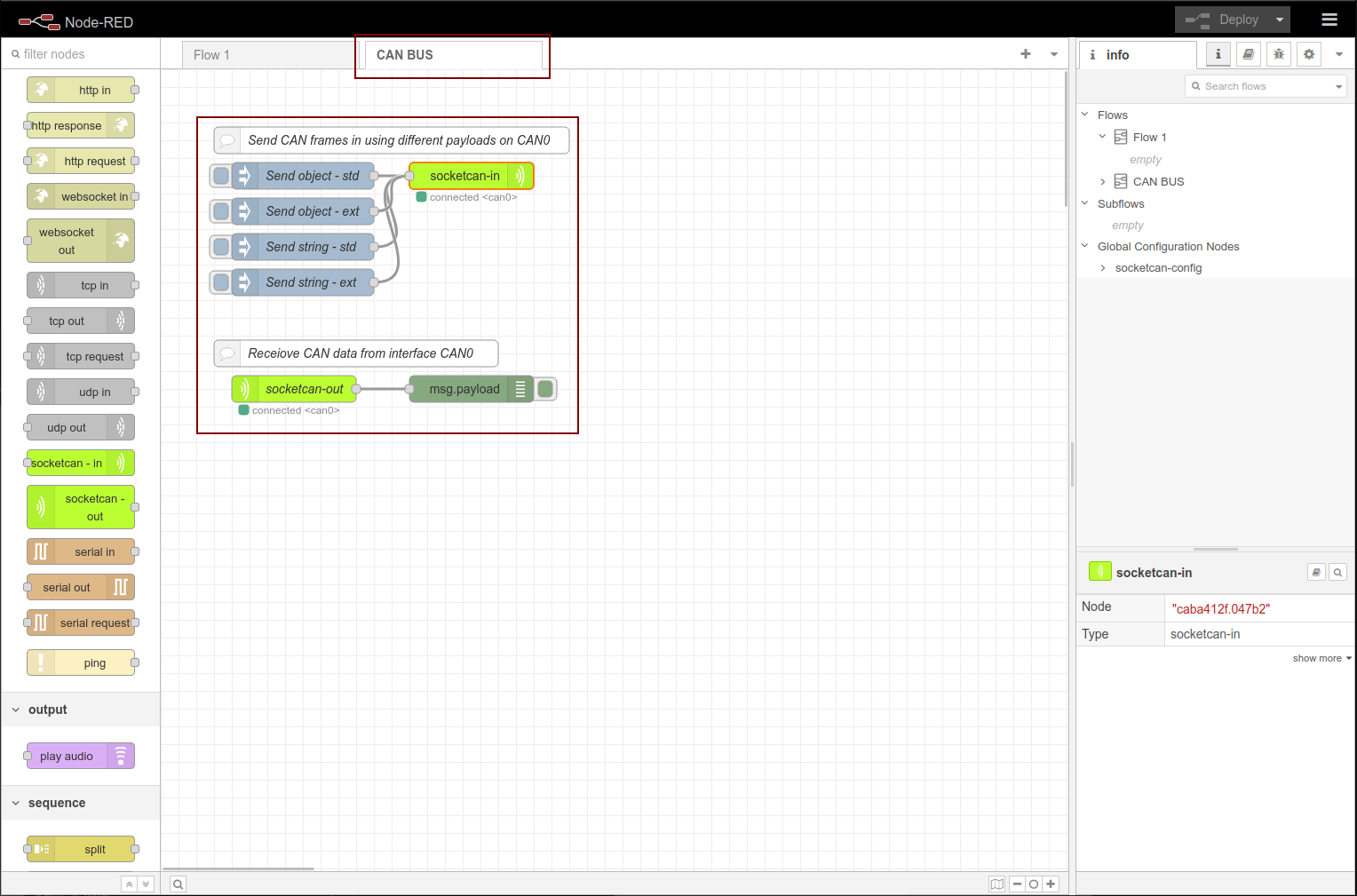
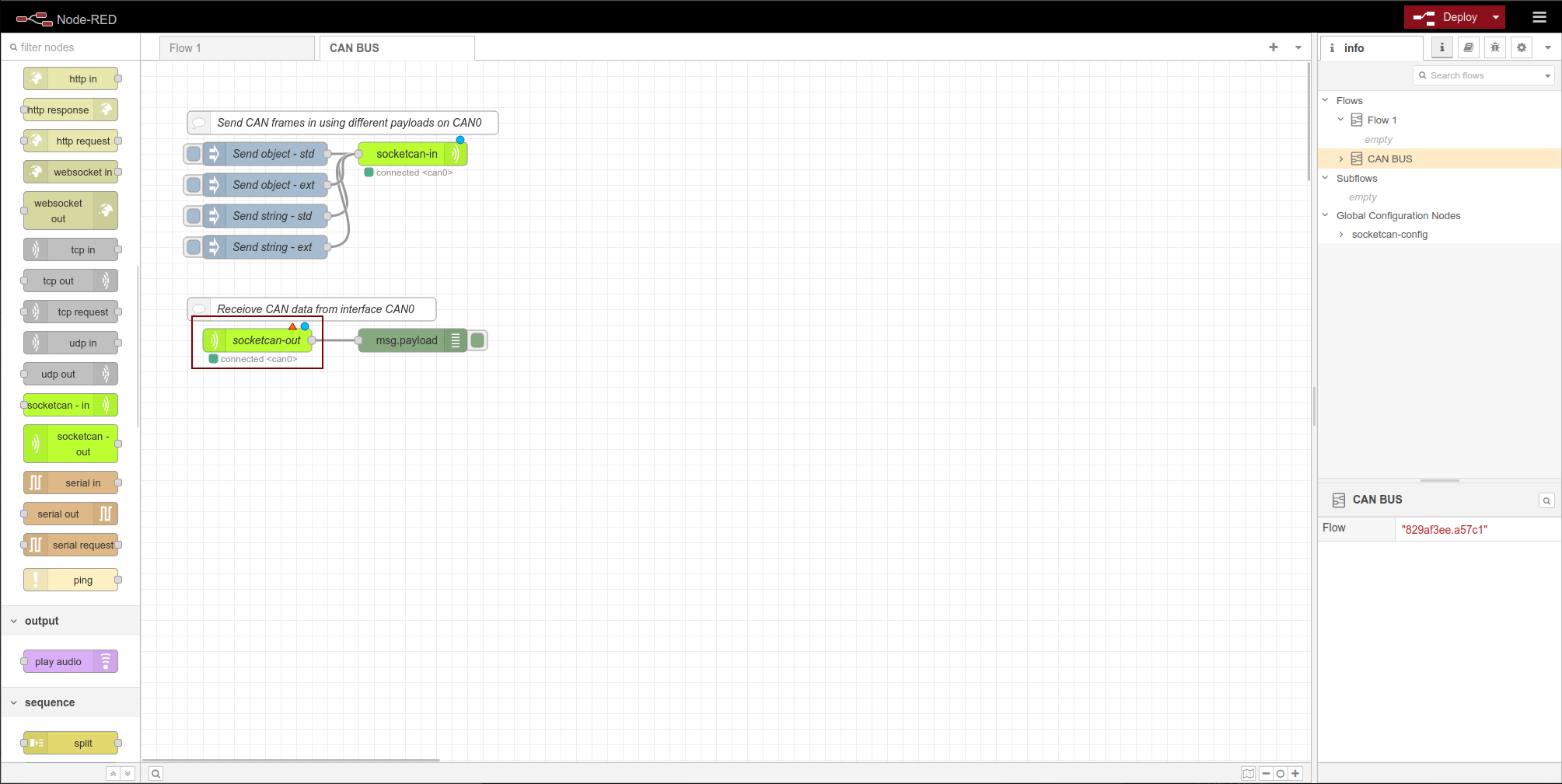
ETAPA 4: Você deverá ver uma nova aba de fluxo chamada CAN BUS criada após as etapas acima, e verifique se o fluxo é o mesmo que o mostrado abaixo
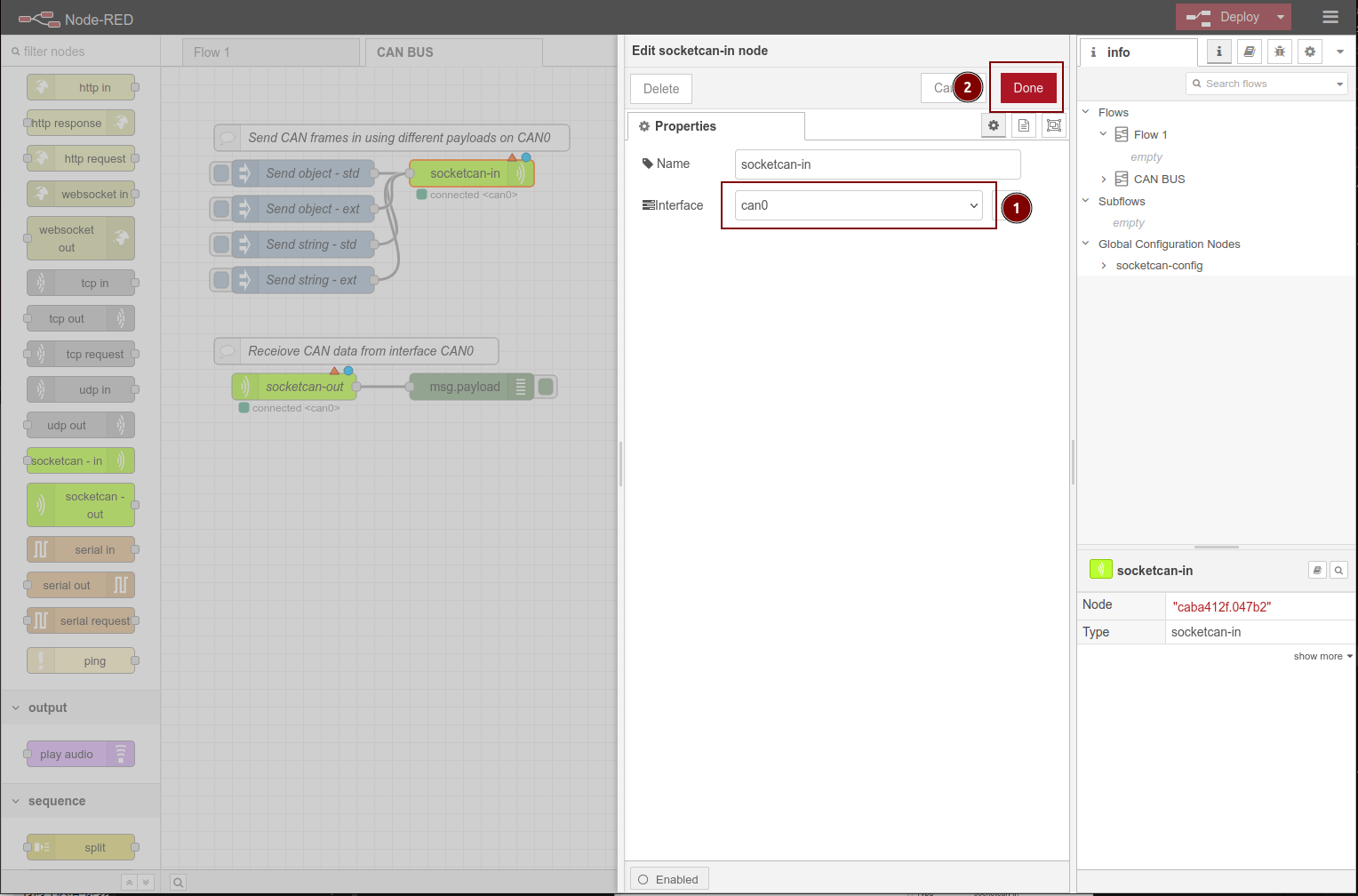
ETAPA 5: para configurar a interface CAN, você precisará dar um clique duplo no socketcan-in node para abrir a janela edit node.
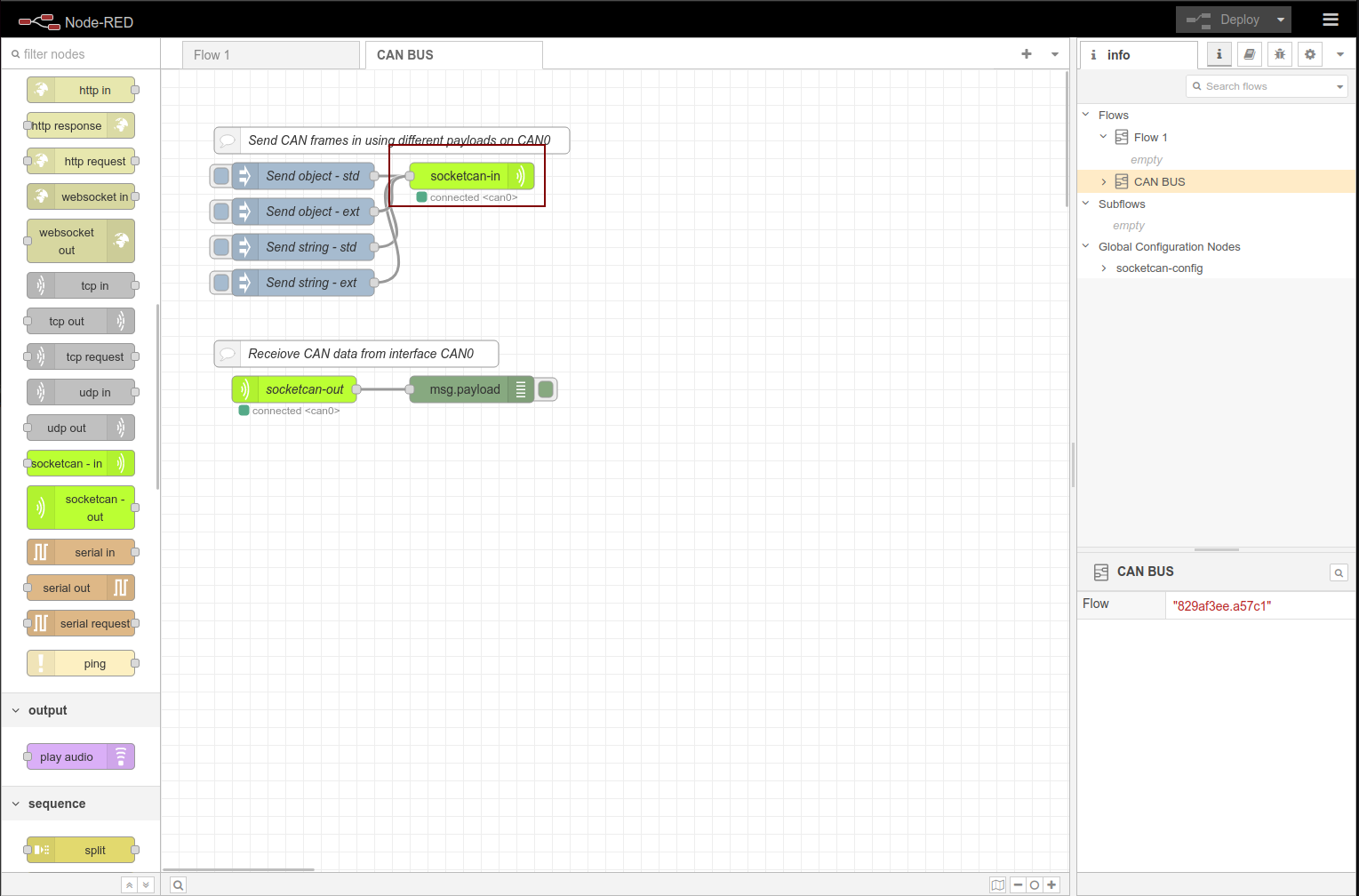
Certifique-se de ter concluído a etapa em Configure CAN BUS on reTerminal DM setion para criar um dispositivo de interface can0 no reTerminal DM
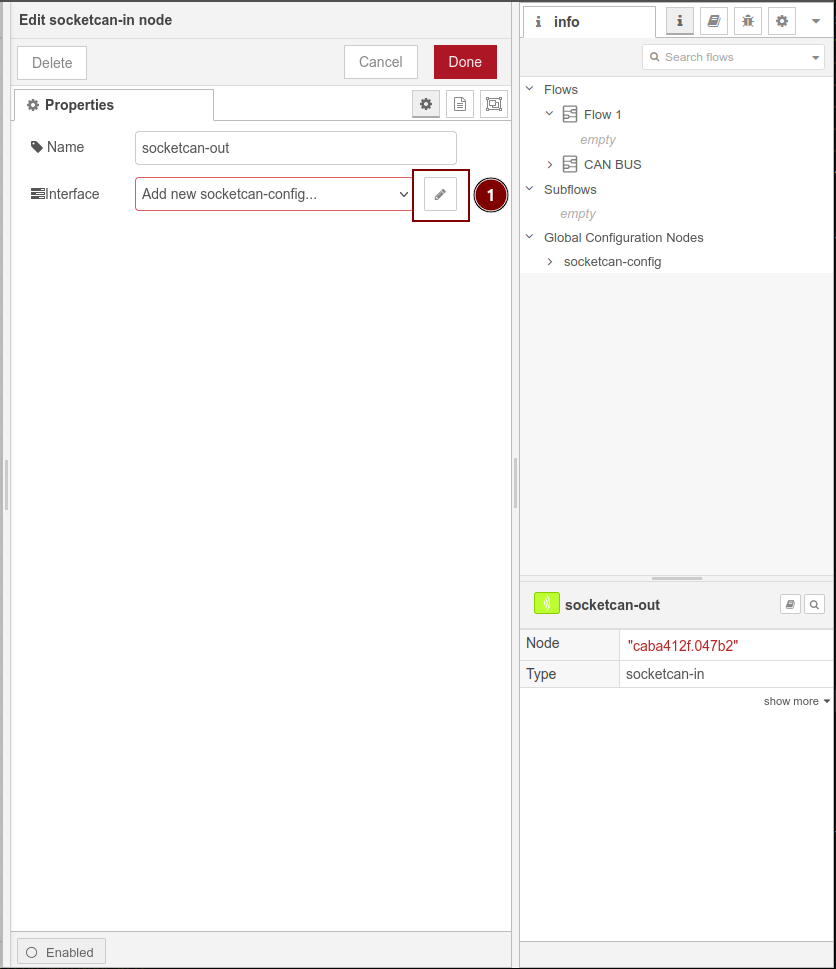
ETAPA 6: Na janela Edit socketcan-in node clique no ícone de lápis na opção interface para abrir a janela Add new socketcan-config config node
ETAPA 7: Na janela Add new socketcan-config config node insira can0 na caixa de diálogo da interface
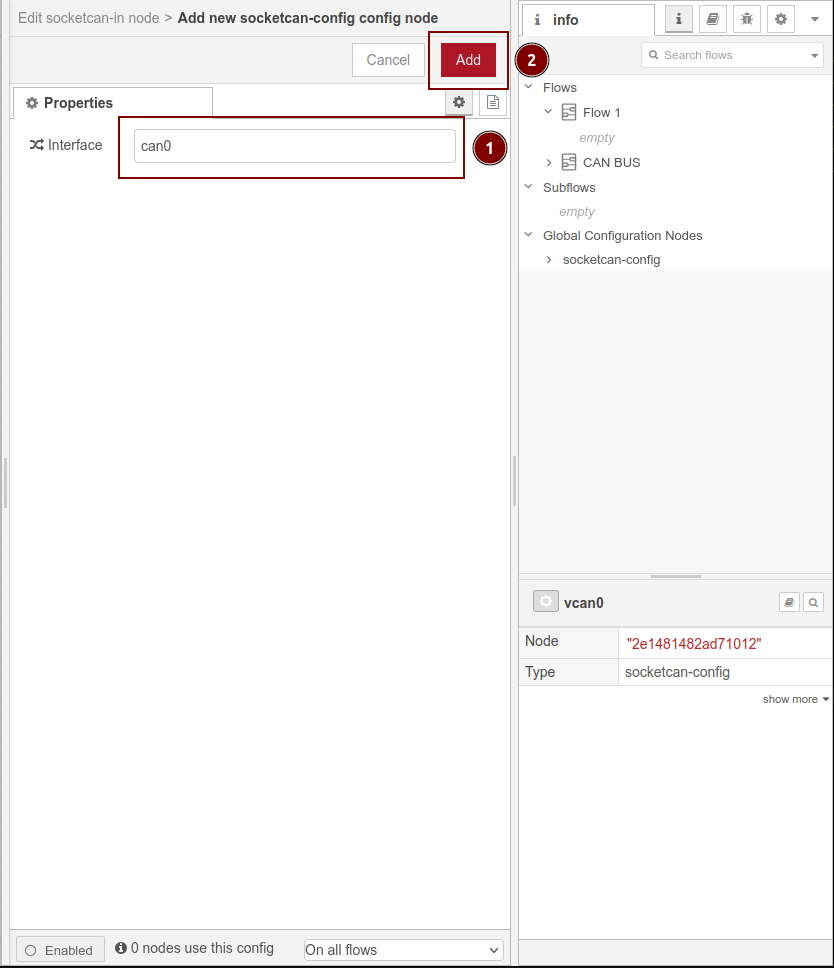
ETAPA 8: depois de clicar no botão Add nas etapas acima você deverá ver que a interface está definida como can0 e então clicar em Done para aplicar.
ETAPA 9: configure a interface CAN Bus para o socketcan-out, o que apenas requer dar um clique duplo no nó scoketcan-out e selecionar can0 para Config, então clique em Done
ETAPA 10: Clique em Deploy agora
Teste Final e Resultado
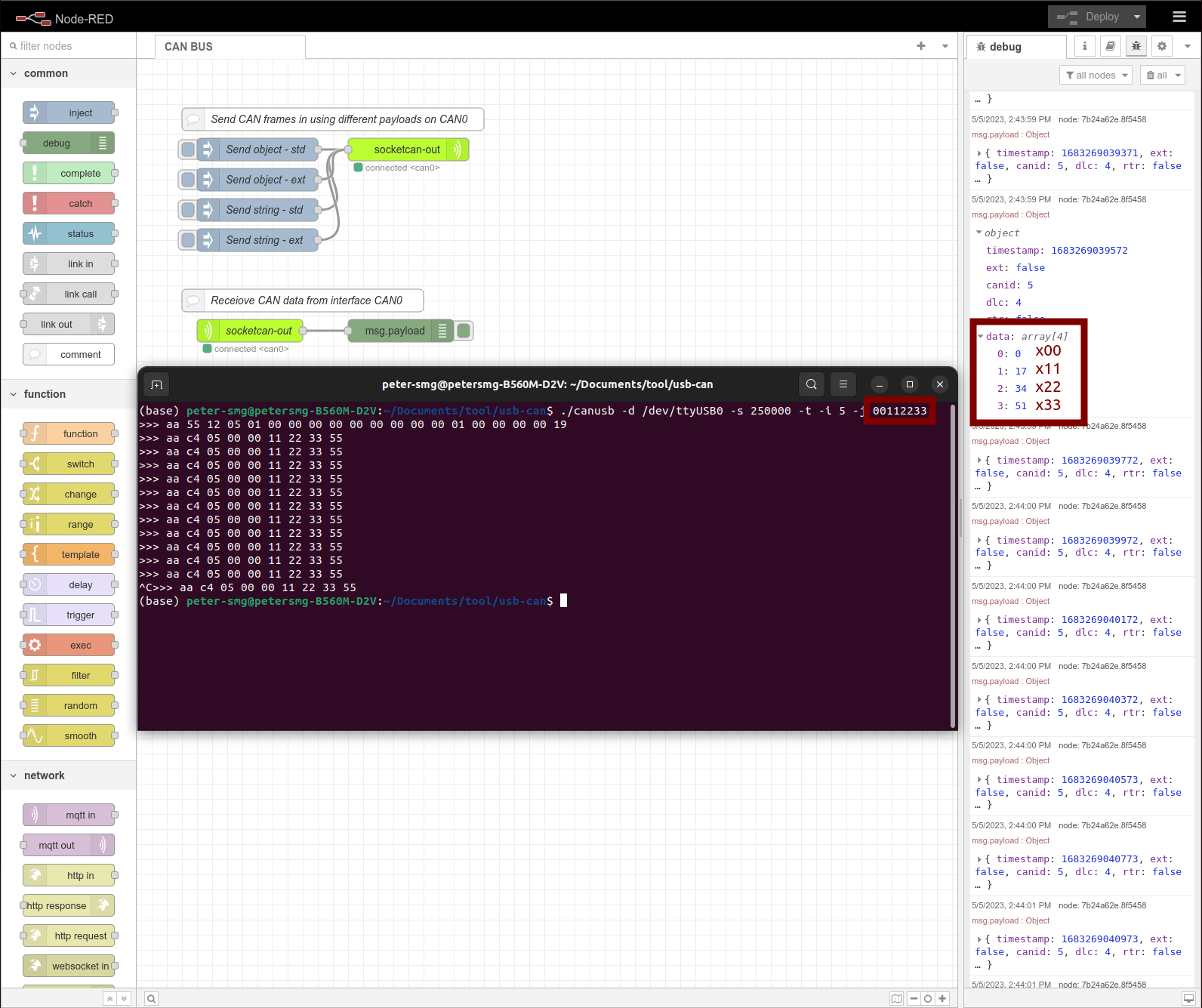
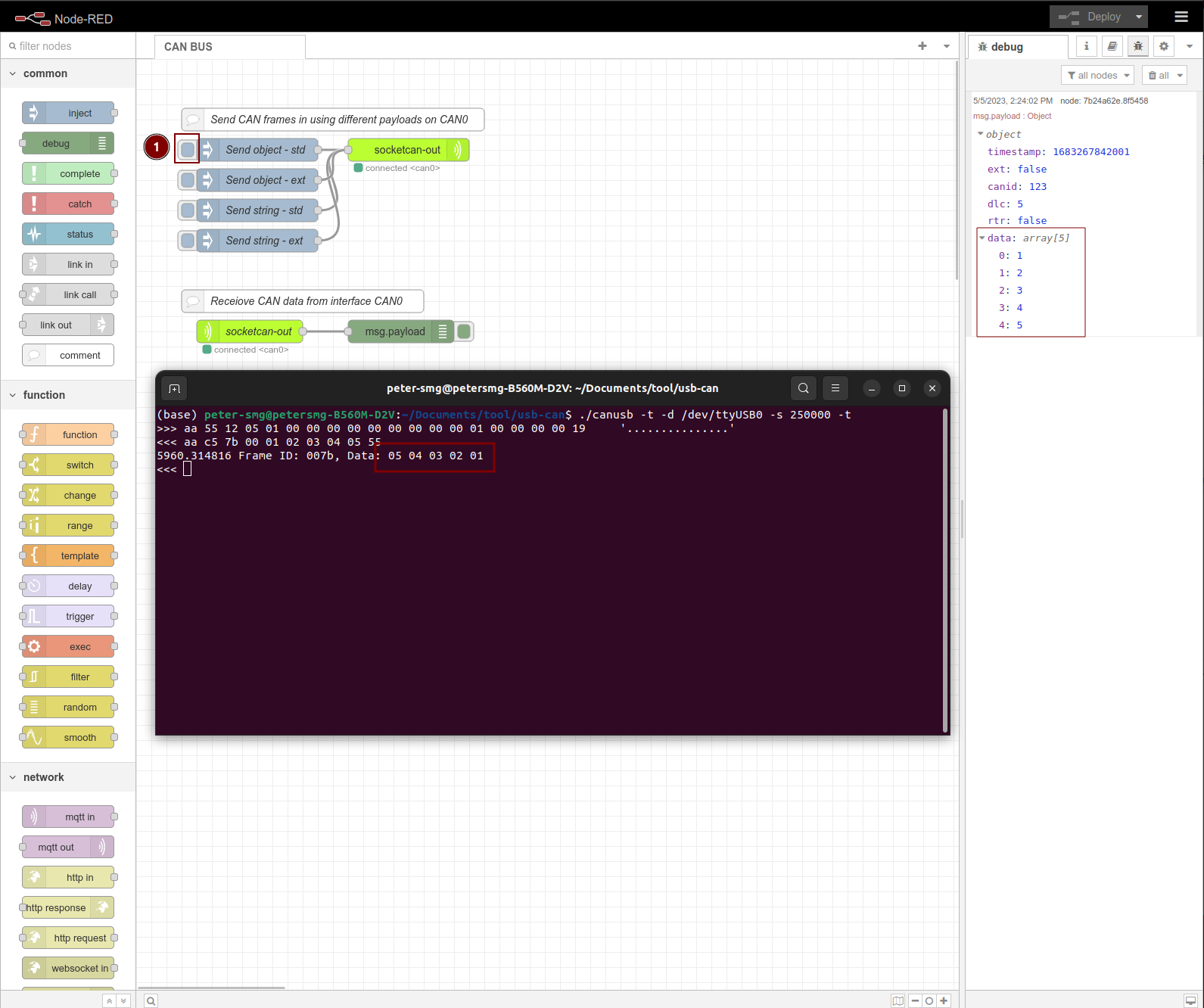
Parabéns, você experimentou e aprendeu com sucesso como usar o protocolo CAN Bus com o reTerminal DM e o node-RED, seus resultados finais devem ser semelhantes à imagem mostrada abaixo
Para o Computador Host enviar dados CAN Bus e o reTerminal DM receber:
- Portanto, a partir da janela de terminal do Computador Host, você pode executar o comando
./canusb -d /dev/ttyUSB0 -s 250000 -t -i 5 -j 00112233para enviar00112233(em hex) para o reTerminal DM, e na janela de depuração do reTerminal DM você pode ver que os dados são
0: 0
1: 17
2: 34
3: 51
que é a representação binária do conjunto de dados HEX x00 x11 x22 x33.
Para o Computador Host receber dados CAN Bus e o reTerminal DM enviar:
- Você precisará clicar no botão
injectno Node-Red do reTerminal DM como mostrado na imagem abaixo para enviar os dados01 02 03 04 05para o Computador Host, e como você pode ver na janela de terminal do computador host o comando para receber é./canusb -t -d /dev/ttyUSB0 -s 250000 -t, os dados recebidos são05 04 03 02 01pois estão em ordem de primeiro a entrar, primeiro a sair:
Explore mais nós no reTerminal DM com node-RED
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para lhe fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.