Primeiros Passos com o reTerminal E10-1
Materiais Necessários
| reTerminal | reTerminal E10-1 |
|---|---|
 |  |
| Adquira agora | Adquira agora |
Preparação Preliminar
Conexão
Observe a orientação e coloque o reTerminal sobre o reTerminal E10-1, pressionando-os para que se encaixem firmemente. Se o reTerminal E10-1 estiver ligado nesse momento, o reTerminal será ativado e inicializará o sistema. Se quiser saber mais sobre o reTerminal, clique em reTerminal.
Instalação e Remoção
Durante o uso do reTerminal E10-1, pode ser necessário remover sua carcaça para adicionar periféricos.
Instalação do Driver
Se você quiser que o reTerminal utilize as funções do reTerminal E10-1, será necessário instalar o driver para o reTerminal antes de começar. Siga os comandos na janela do terminal do reTerminal.
git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays.git
cd seeed-linux-dtoverlays
sudo ./scripts/reTerminal.sh
Para SO 32bit você precisará adicionar o seguinte passo antes de executar sudo ./scripts/reTerminal.sh
echo arm_64bit=0 | sudo tee -a /boot/config.txt
Após a conclusão da instalação, reinicie a máquina. Em seguida, use o seguinte comando para verificar se o arquivo reTerminal-bridge.dtbo existe, para garantir que a instalação do driver foi concluída.
ls /boot/overlays/reTerminal-bridge.dtbo

Instalar Bibliotecas
Instale a biblioteca python3.
sudo apt-get update
sudo apt-get install python3-pip
sudo pip3 install RPi.GPIO
sudo apt-get install python3-serial
Instale a biblioteca git.
sudo apt install -y git
Fonte de Alimentação
Existem três métodos para fornecer alimentação, mostrados abaixo:
- Conector DC
- PoE
- UPS - bateria 18650
A bateria para este dispositivo é a bateria recarregável de íons de lítio NCR18650B. Observe que não há bateria na embalagem, porém a bateria está disponível em lojas de conveniência comuns e o cliente precisa providenciá-la. E o que propomos é a Panasonic NCR18650B 3,6V 3400mAh.
Conector DC
Forneça alimentação ao reTerminal, à placa de expansão e à bateria em DC 12V @4A
PoE
A entrada de alimentação PoE é RJ45 e suporta um máximo de 25W de potência de entrada.
UPS - bateria 18650
Suporte para 2 x baterias com pino de fixação.
Ventoinha
Materiais necessários
- reTerminal x1
- reTerminal E10-1 x1
- Ventoinha (incluída) x1
Para manter o reTerminal e o reTerminal E10-1 em um nível de temperatura normal sob carga pesada, há uma ventoinha de 3 pinos dentro do reTerminal E10-1.

Este exemplo apresenta como controlar a ventoinha no reTerminal E10-1.
Passo 1. Podemos controlar diretamente o interruptor da ventoinha com o seguinte comando.
#Toggle fan on
raspi-gpio set 23 op pn dh
#Toggle fan off
raspi-gpio set 23 op pn dl
Passo 2. Também podemos ativar e desativar a ventoinha detectando a temperatura da CPU. Siga os passos abaixo para baixar e executar o programa.
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_Fan_control.git
cd Seeed_reTerminal_Bridge_Fan_control/
sudo python3 fan.py
Aqui está o código fan.py para referência.
import sys
import time
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importting Rpi.GPIO")
MAX_TEMP = 40.0
MIN_TEMP = 20.0
def cpu_temp():
f = open("/sys/class/thermal/thermal_zone0/temp",'r')
return float(f.read())/1000
def main():
channel = 23
GPIO.setmode(GPIO.BCM)
# init 23 off
GPIO.setup(channel,GPIO.OUT,initial=GPIO.LOW)
is_close = True
while 1:
temp = cpu_temp()
if is_close:
if temp > MAX_TEMP:
GPIO.output(channel,GPIO.HIGH)
is_close = False
else:
if temp < MIN_TEMP:
GPIO.output(channel,GPIO.LOW)
is_close = True
time.sleep(2.0)
GPIO.setwarnings(False)
if __name__ == '__main__':
main()
Depois que o código for executado com sucesso, quando a temperatura da CPU for detectada como superior a 40°C, a ventoinha será ligada. Quando a temperatura for inferior a 20°C, a ventoinha será desligada.
Comunicação CAN
Uma Controller Area Network (CAN) é um padrão robusto de barramento veicular projetado para permitir que microcontroladores e dispositivos se comuniquem com as aplicações uns dos outros sem um computador host.
Materiais necessários
- reTerminal x2
- reTerminal E10-1 x2
- cabo macho-macho x2
Este exemplo apresenta como usar o CAN no reTerminal E10-1.
Passo 1. Use cabos macho-macho para conectar os dois reTerminal E10-1 através da interface CAN.
H -> H L -> L GND -> GND
Passo 2. Instale o CAN-utils separadamente nos dois reTerminals.
sudo apt install can-utils
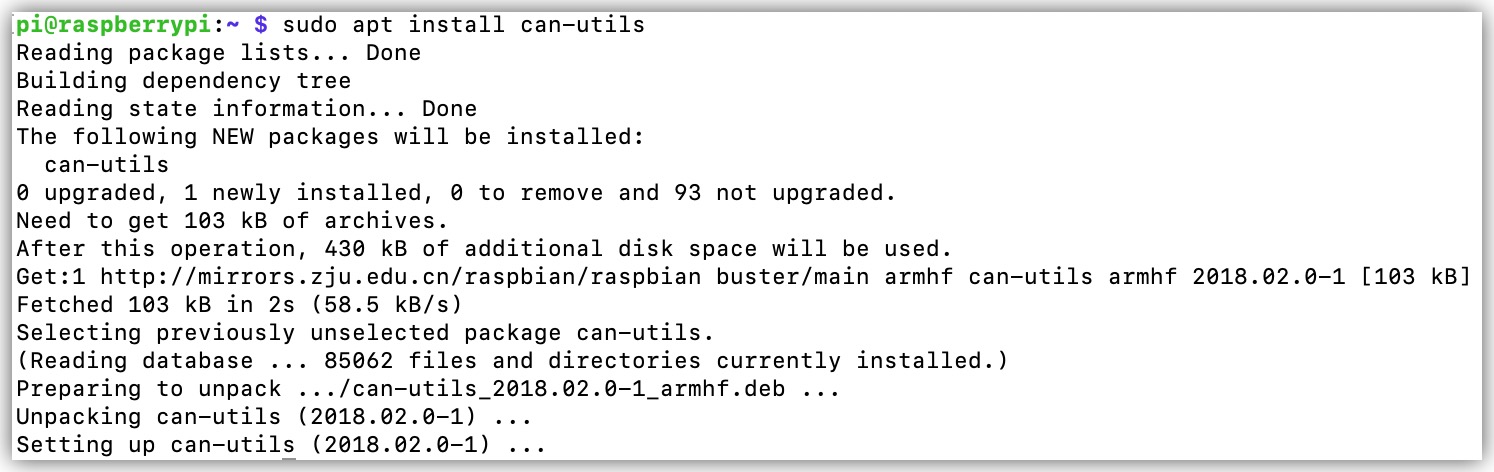
CAN-utils é uma coleção de ferramentas de depuração extremamente úteis que usam a interface CAN. Inclui aplicações como:
- candump – Despeja pacotes CAN – exibe, filtra e registra em disco.
- canplayer – Reproduz arquivos de log CAN.
- cansend – Envia um único frame.
- cangen – Gera tráfego aleatório.
- canbusload – Exibe a utilização atual do barramento CAN.
O código-fonte do CAN-utils pode ser obtido no repositório GitHub.
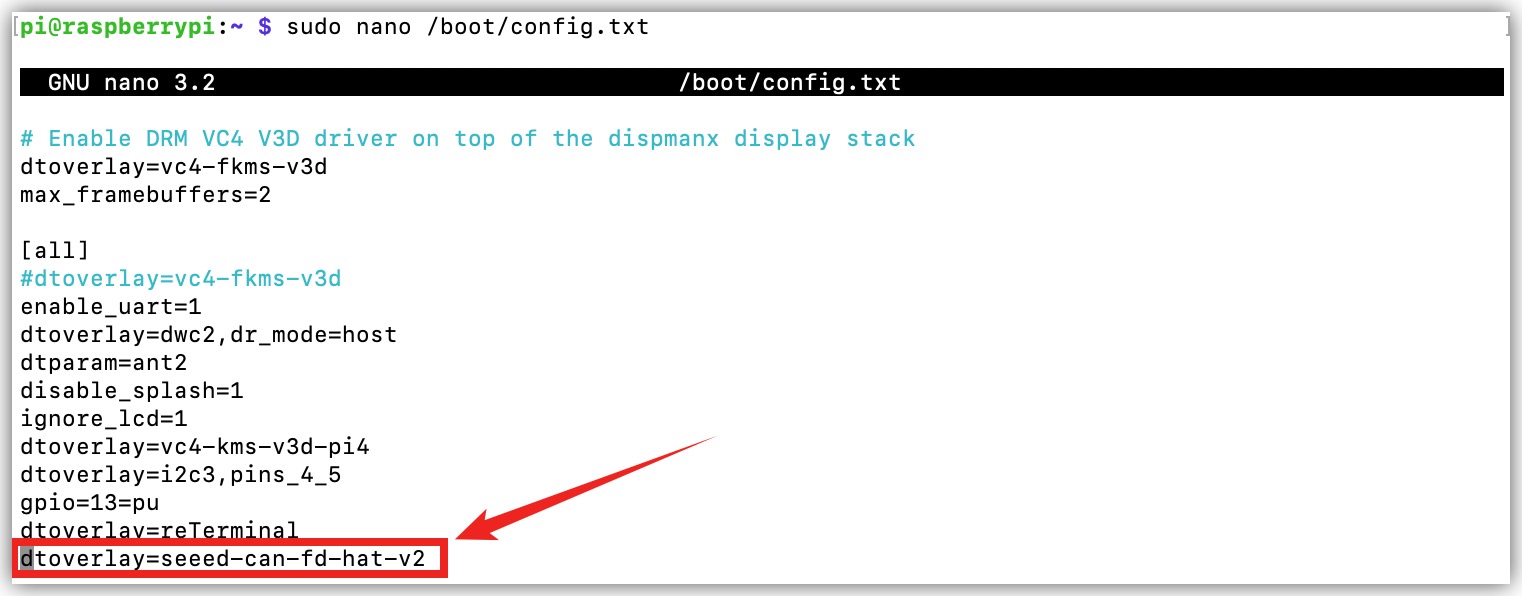
Passo 3. Adicione informações de configuração para os dois reTerminals. Abra o arquivo /boot/config.txt com um editor e salve-o após adicionar dtoverlay=seeed-can-fd-hat-v2 ao final, depois reinicie o reTerminal.
Sem uma EEPROM de ID no “hat” especificando o hardware, o kernel Linux não descobrirá automaticamente o Controlador CAN na interface SPI. Para carregar o driver apropriado, você deve especificar as configurações de device tree overlay na inicialização.
sudo nano /boot/config.txt
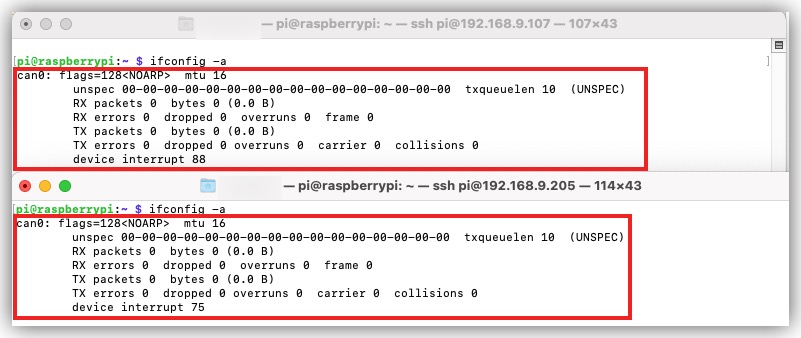
Passo 4. A interface CAN se comporta exatamente como uma interface de rede. Você deve conseguir obter várias estatísticas usando ifconfig -a (configuração de interface).
Use o comando cangen can0 -v para enviar dados aleatórios e testar se a comunicação CAN está funcionando bem.
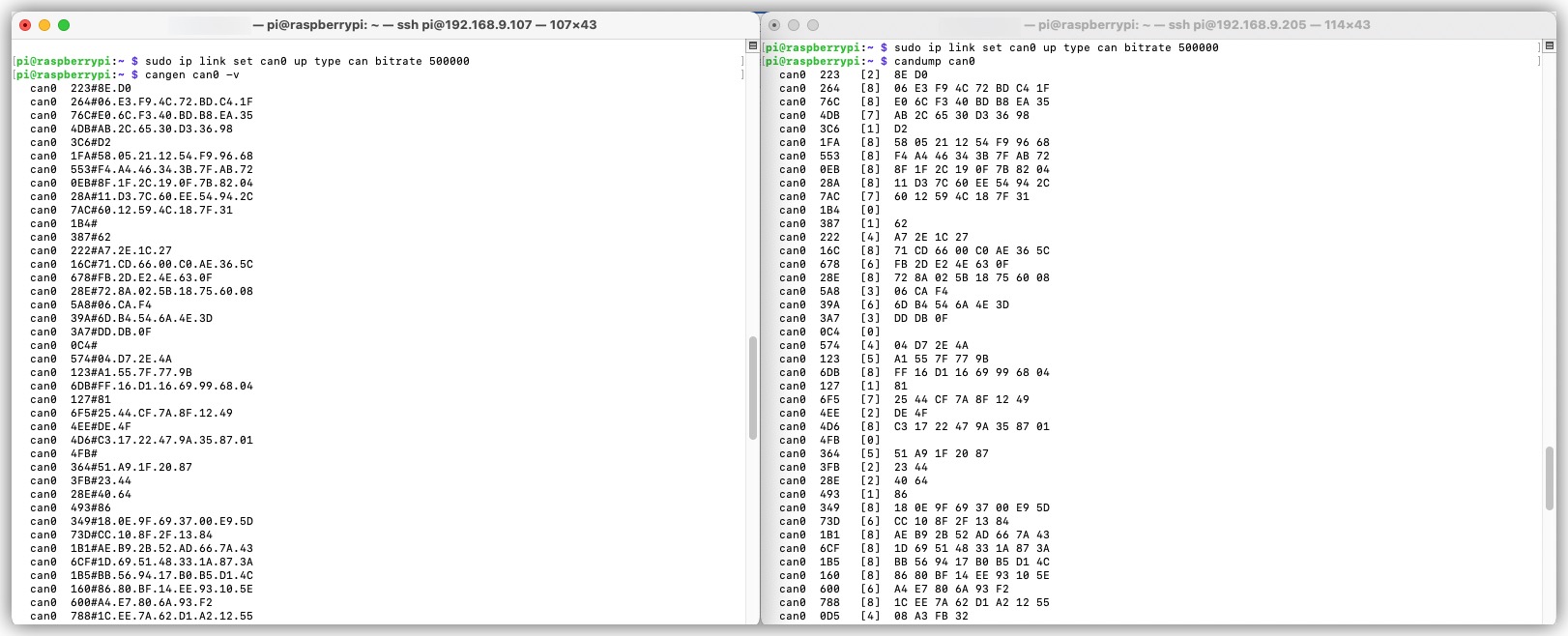
Passo 5. Você pode ativar manualmente a interface CAN usando:
sudo ip link set can0 up type can bitrate 500000
Passo 6. Baixe o código para o reTerminal.
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_CAN_exmaple
Um dos reTerminals compila e executa o código que envia os dados.
cd Seeed_reTerminal_Bridge_CAN_exmaple/
gcc cantransmit.c -o cantransmit
Aqui está o código cantransmit.c para referência.
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char **argv)
{
int s;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
printf("CAN Sockets Demo\r\n");
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket");
return 1;
}
strcpy(ifr.ifr_name, "can0" );
ioctl(s, SIOCGIFINDEX, &ifr);
memset(&addr, 0, sizeof(addr));
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind");
return 1;
}
frame.can_id = 0x555;
frame.can_dlc = 5;
sprintf(frame.data, "Hello");
if (write(s, &frame, sizeof(struct can_frame)) != sizeof(struct can_frame)) {
perror("Write");
return 1;
}
if (close(s) < 0) {
perror("Close");
return 1;
}
return 0;
}
Outro reTerminal compila e executa o código que recebe os dados.
gcc canreceive.c -o canreceive
Aqui está o código canreceive.c para referência.
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char **argv)
{
int s, i;
int nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
printf("CAN Sockets Receive Demo\r\n");
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket");
return 1;
}
strcpy(ifr.ifr_name, "can0" );
ioctl(s, SIOCGIFINDEX, &ifr);
memset(&addr, 0, sizeof(addr));
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind");
return 1;
}
nbytes = read(s, &frame, sizeof(struct can_frame));
if (nbytes < 0) {
perror("Read");
return 1;
}
printf("0x%03X [%d] ",frame.can_id, frame.can_dlc);
for (i = 0; i < frame.can_dlc; i++)
printf("%02X ",frame.data[i]);
printf("\r\n");
if (close(s) < 0) {
perror("Close");
return 1;
}
return 0;
}
Você pode ver que os dois reTerminals enviam e recebem dados com sucesso através da interface CAN.
Além da leitura, você pode querer filtrar quadros CAN que não sejam relevantes. Isso acontece no nível do driver e pode ser mais eficiente do que ler cada quadro em um aplicativo em modo de usuário.
gcc canfilter.c -o canfilter
Aqui está o código canfilter.c para referência.
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char **argv)
{
int s, i;
int nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
printf("CAN Sockets Receive Filter Demo\r\n");
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket");
return 1;
}
strcpy(ifr.ifr_name, "can0" );
ioctl(s, SIOCGIFINDEX, &ifr);
memset(&addr, 0, sizeof(addr));
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind");
return 1;
}
/*
To set up a filter, initialise a single can_filter structure or array of
structures and populate the can_id and can_mask. The call setsockopt():
*/
struct can_filter rfilter[1];
rfilter[0].can_id = 0x550;
rfilter[0].can_mask = 0xFF0;
//rfilter[1].can_id = 0x200;
//rfilter[1].can_mask = 0x700;
setsockopt(s, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter));
nbytes = read(s, &frame, sizeof(struct can_frame));
if (nbytes < 0) {
perror("Read");
return 1;
}
printf("0x%03X [%d] ",frame.can_id, frame.can_dlc);
for (i = 0; i < frame.can_dlc; i++)
printf("%02X ",frame.data[i]);
printf("\r\n");
// And finally, if there is no further need for the socket, close it:
if (close(s) < 0) {
perror("Close");
return 1;
}
return 0;
}
A maioria dos controladores CAN possui filtros de aceitação e máscaras incluídos em silício (hardware). Infelizmente, a arquitetura atual realiza a filtragem no kernel e não é tão ideal, mas ainda é melhor do que passar todos os quadros para o aplicativo em modo de usuário.
Comunicação RS485
RS485, também conhecido como TIA-485(-A) ou EIA-485, é um padrão que define as características elétricas de drivers e receptores para uso em sistemas de comunicações seriais. A sinalização elétrica é balanceada e sistemas multiponto são suportados. Redes de comunicação digital que implementam o padrão podem ser usadas de forma eficaz em longas distâncias e em ambientes eletricamente ruidosos. Vários receptores podem ser conectados a essa rede em um barramento linear multiponto.
Materiais Necessários
Este exemplo apresenta como usar o RS485 no reTerminal E10-1.
Passo 1. Como a função RS485 usa ttyS0, é necessário fechar a função de interação do sistema ttyS0 antes de iniciar.
sudo raspi-config
Selecione Interface Options, Serial port sucessivamente.
Na próxima tela, será perguntado se você deseja o shell de login acessível via serial, selecione No.
Em seguida, em “Do you want to use serial port hardware”, certifique-se de que Yes esteja selecionado.
Depois que o reTerminal fizer as alterações, você verá o seguinte texto aparecer na tela.
Passo 2. Use um cabo para conectar o reTerminal E10-1 ao computador pela interface RS485.
A -> A B -> B GND -> GND
Passo 3. Use o comando dmesg | grep tty para visualizar o nome da porta serial. Determine o nome da porta serial para a comunicação RS485 com o computador. Isso pode variar de computador para computador. Em geral, é ttyS0.

Passo 4. Baixe o código para o reTerminal.
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_RS485_exmaple
cd Seeed_reTerminal_Bridge_RS485_exmaple/
Abra o software de porta serial no computador. Execute o comando sudo python3 rs485.py para obter os seguintes efeitos.
Ao mesmo tempo, você também pode enviar dados de 16 bytes para o reTerminal por meio do assistente de porta serial dentro de 5 segundos após receber a mensagem.
Aqui está o código rs485.py para referência.
import serial, time
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importting Rpi.GPIO")
GPIO.setmode(GPIO.BCM)
ser = serial.Serial()
ser.port = "/dev/ttyS0"
channel1 = 25
channel2 = 17
#9600,N,8,1
ser.baudrate = 9600
ser.bytesize = serial.EIGHTBITS #number of bits per bytes
ser.parity = serial.PARITY_NONE #set parity check
ser.stopbits = serial.STOPBITS_ONE #number of stop bits
ser.timeout = 0.5 #non-block read 0.5s
ser.writeTimeout = 0.5 #timeout for write 0.5s
ser.xonxoff = False #disable software flow control
ser.rtscts = False #disable hardware (RTS/CTS) flow control
ser.dsrdtr = False #disable hardware (DSR/DTR) flow control
GPIO.setup(channel1,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(channel2,GPIO.OUT,initial=GPIO.LOW)
try:
ser.open()
except Exception as ex:
print ("open serial port error " + str(ex))
exit()
if ser.isOpen():
try:
ser.flushInput() #flush input buffer
ser.flushOutput() #flush output buffer
GPIO.output(channel1,GPIO.HIGH)
GPIO.output(channel2,GPIO.HIGH)
time.sleep(0.1)
#write data
ser.write("rs485 communication is on, you can try to send data...\n".encode())
print("Sent successfully\n")
GPIO.output(channel2,GPIO.LOW)
time.sleep(5) #wait 5s
#read data
response = ser.read(16)
print("read 16 byte data:")
print(response)
ser.close()
except Exception as e1:
print ("communicating error " + str(e1))
else:
print ("open serial port error")
Comunicação RS232
RS-232, ou Recommended Standard 232, é um padrão originalmente introduzido em 1960 para transmissão de dados por comunicação serial. Ele define formalmente sinais conectando entre um DTE e um DCE. Em comparação com interfaces posteriores, como RS-422, RS-485 e Ethernet, o RS-232 tem menor velocidade de transmissão, comprimento máximo de cabo mais curto, maior variação de tensão, conectores padrão maiores, nenhuma capacidade multiponto e capacidade multidrop limitada.
Materiais Necessários
Este exemplo apresenta como usar o RS232 no reTerminal E10-1.
Passo 1. Como a função RS485 usa ttyS0, é necessário fechar a função de interação do sistema ttyS0 antes de iniciar.
sudo raspi-config
Selecione Interface Options, Serial port sucessivamente.
Na próxima tela, será perguntado se você deseja o shell de login acessível via serial, selecione No.
Em seguida, em “Do you want to use serial port hardware”, certifique-se de que Yes esteja selecionado.
Depois que o reTerminal fizer as alterações, você verá o seguinte texto aparecer na tela.
Passo 2. Use um cabo para conectar o reTerminal E10-1 ao computador pela interface RS232.
Passo 3. Use o comando dmesg | grep tty para visualizar o nome da porta serial. Determine o nome da porta serial para a comunicação RS232 com o computador. Isso pode variar de computador para computador. Em geral, é ttyS0.
Passo 4. Baixe o código para o reTerminal.
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_RS232_exmaple
cd Seeed_reTerminal_Bridge_RS232_exmaple/
Um dos reTerminals compila e executa o código que envia os dados.
sudo python3 rs232_send.py
Aqui está o código rs232_send.py para referência.
#!/usr/bin/env python
import time
import serial
ser = serial.Serial(
port='/dev/ttyS0', # Please modify here according to the serial port name displayed by reTerminal
baudrate = 9600,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
bytesize=serial.EIGHTBITS,
timeout=1
)
counter=0
try:
print("rs232 starts now!\n")
ser.write("rs232 starts now!\n".encode())
while 1:
ser.write(("Write counter:{}\n".format(counter)).encode())
time.sleep(1)
counter += 1
except KeyboardInterrupt:
exit()
Outro reTerminal compila e executa o código que recebe os dados.
sudo python3 rs232_receive.py
Aqui está o código rs232_receive.py para referência.
#!/usr/bin/env python
import time
import serial
ser = serial.Serial(
port='/dev/ttyS0',
baudrate = 9600,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
bytesize=serial.EIGHTBITS,
timeout=1
)
try:
print("Start receiving data now!\n")
while 1:
x=ser.readline()
if x != b'':
print(x)
except KeyboardInterrupt:
exit()
Ethernet
Materiais Necessários
- reTerminal x1
- reTerminal E10-1 x1
Este exemplo apresenta como testar a conexão ethernet no reTerminal E10-1.
Passo 1. Baixe o iperf3 para o reTerminal e para o computador.
git clone https://github.com/esnet/iperf.git
Passo 2. Use os seguintes códigos para instalar o iperf3
cd iperf
sudo ./configure
sudo make
sudo make install
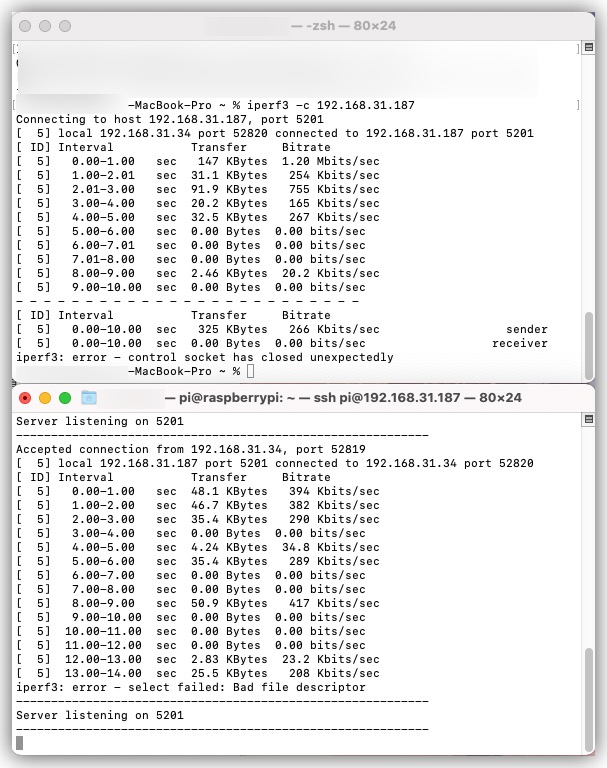
Passo 3. Use o reTerminal como servidor.
iperf3 -s
Use um computador para testar a velocidade de rede conectada ao reTerminal. Neste momento, mantenha o computador e o reTerminal na mesma rede local.
iperf3 -c 192.168.xxx.xxx
O endereço "192.168.xxx.xxx" acima é o endereço do reTerminal.
Por exemplo, na minha configuração o endereço IP do reTerminal é 192.168.31.187:
iperf3 -c 192.168.31.187
Se você precisar concluir mais funções de teste de rede, pode consultar o uso de parâmetros de consulta no site do projeto iperf.
WM1302 (USB/SPI) LoRaWAN Gateway
Materiais Necessários
A diferença entre o módulo USB e SPI é mostrada abaixo:

Este exemplo apresenta como usar o WM1302 LoRaWAN Gateway no reTerminal E10-1.
Passo 1. Instale o módulo WM1302 no reTerminal E10-1 e depois fixe-o com parafusos.
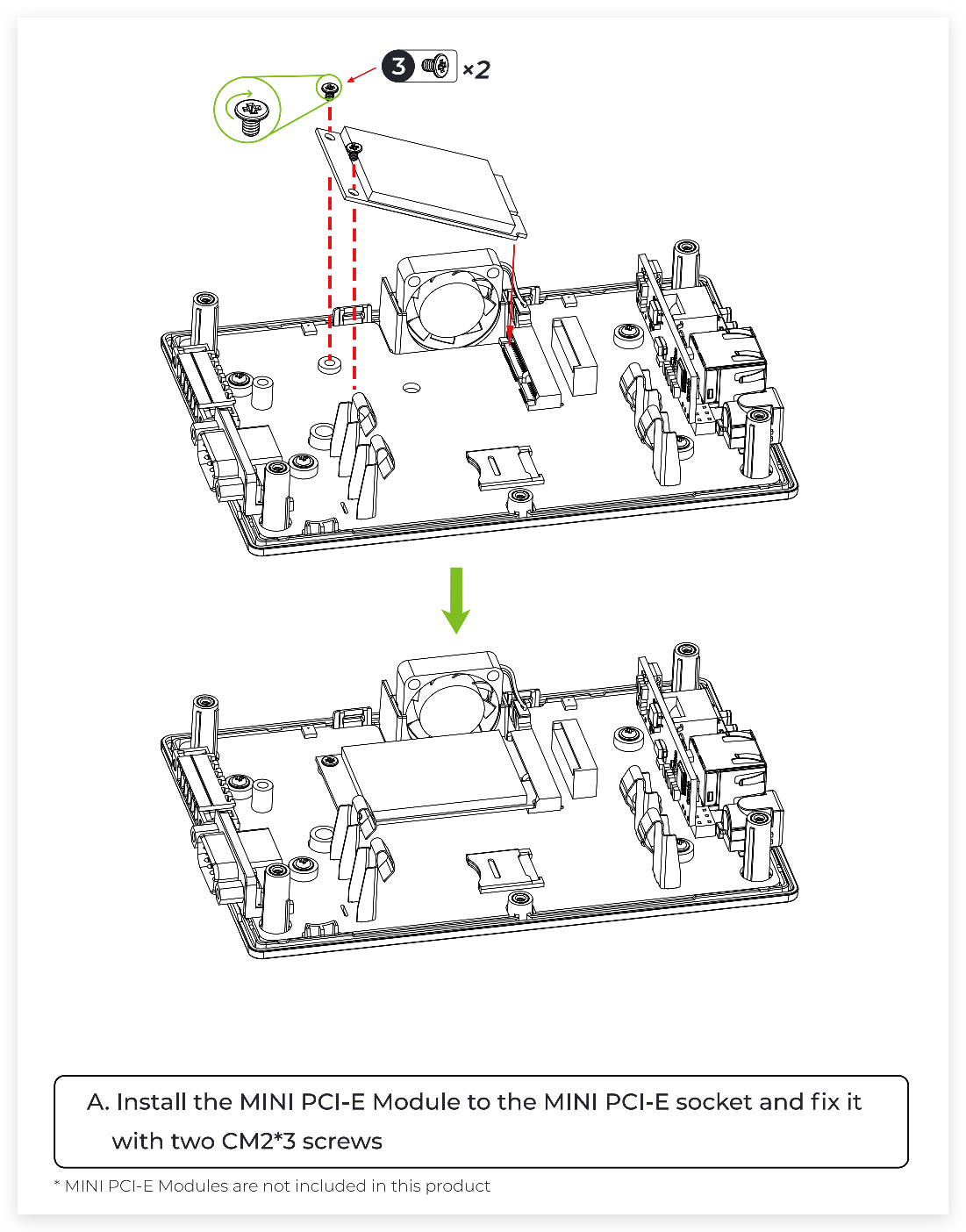

Em seguida, gire o botão ao lado do ventilador para PCIE.

Passo 2. digite sudo raspi-config na linha de comando para abrir a Ferramenta de Configuração de Software do Raspberry Pi:
- Selecione Interface Options
- Selecione SPI e depois selecione Yes para habilitá-lo
- Selecione I2C e depois selecione Yes para habilitá-lo
- Selecione Serial Port, depois selecione No para "Would you like a login shell..." e selecione Yes para "Would you like the serial port hardware..."
Depois disso, reinicie o Raspberry Pi para garantir que essas configurações funcionem.
Passo 3. Baixe o código WM1302 para o reTerminal e compile-o.
git clone https://github.com/Lora-net/sx1302_hal
cd sx1302_hal
sudo make
Passo 4. Configure o script de reset. Primeiro baixe o arquivo para sx1302_hal/packet_forwarder usando o comando
cd sx1302_hal/packet_forwarder
wget https://files.seeedstudio.com/wiki/reTerminal_Bridge/reset_lgw.sh
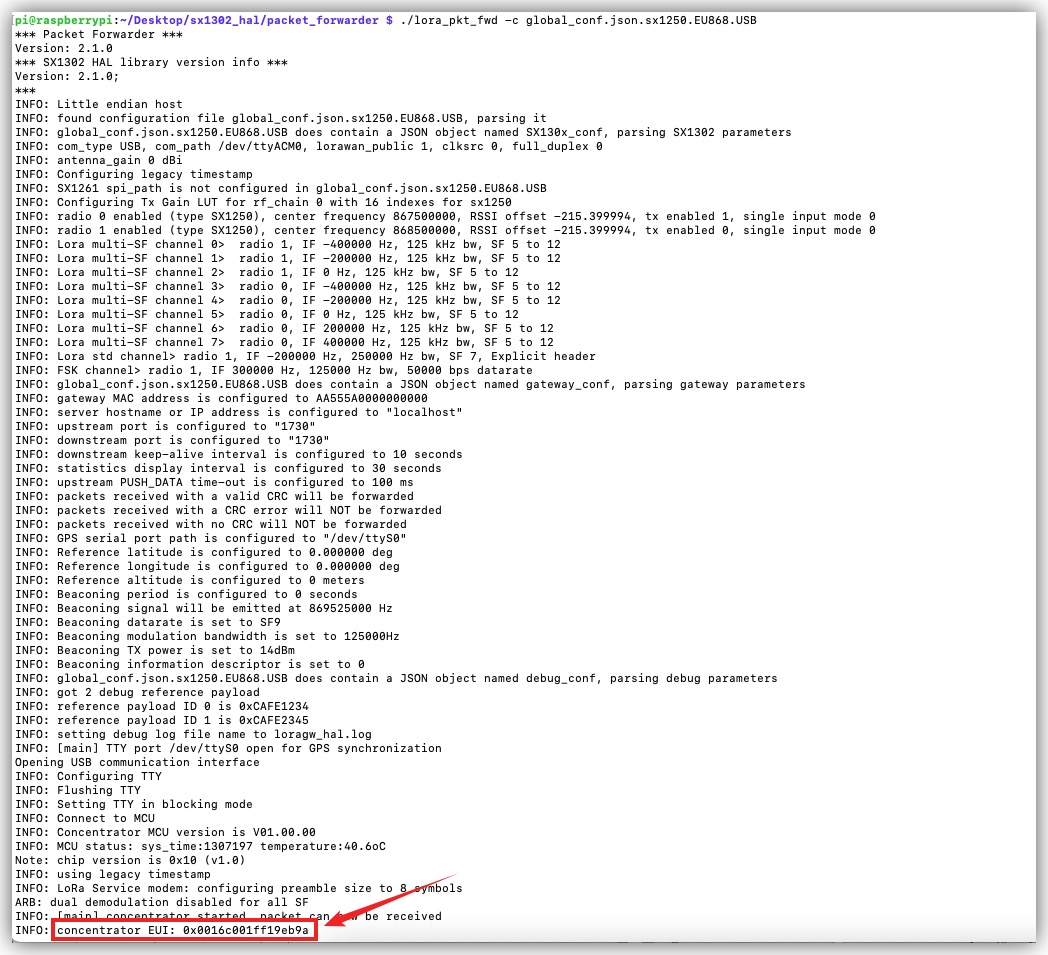
Em seguida, execute o seguinte teste de código de acordo com a sua versão do WM1302.
USB version
$ cd packet_forwarder
$ sudo nano reset_lgw.sh
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
SPI version
$ cd packet_forwarder
$ sudo nano reset_lgw.sh
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868
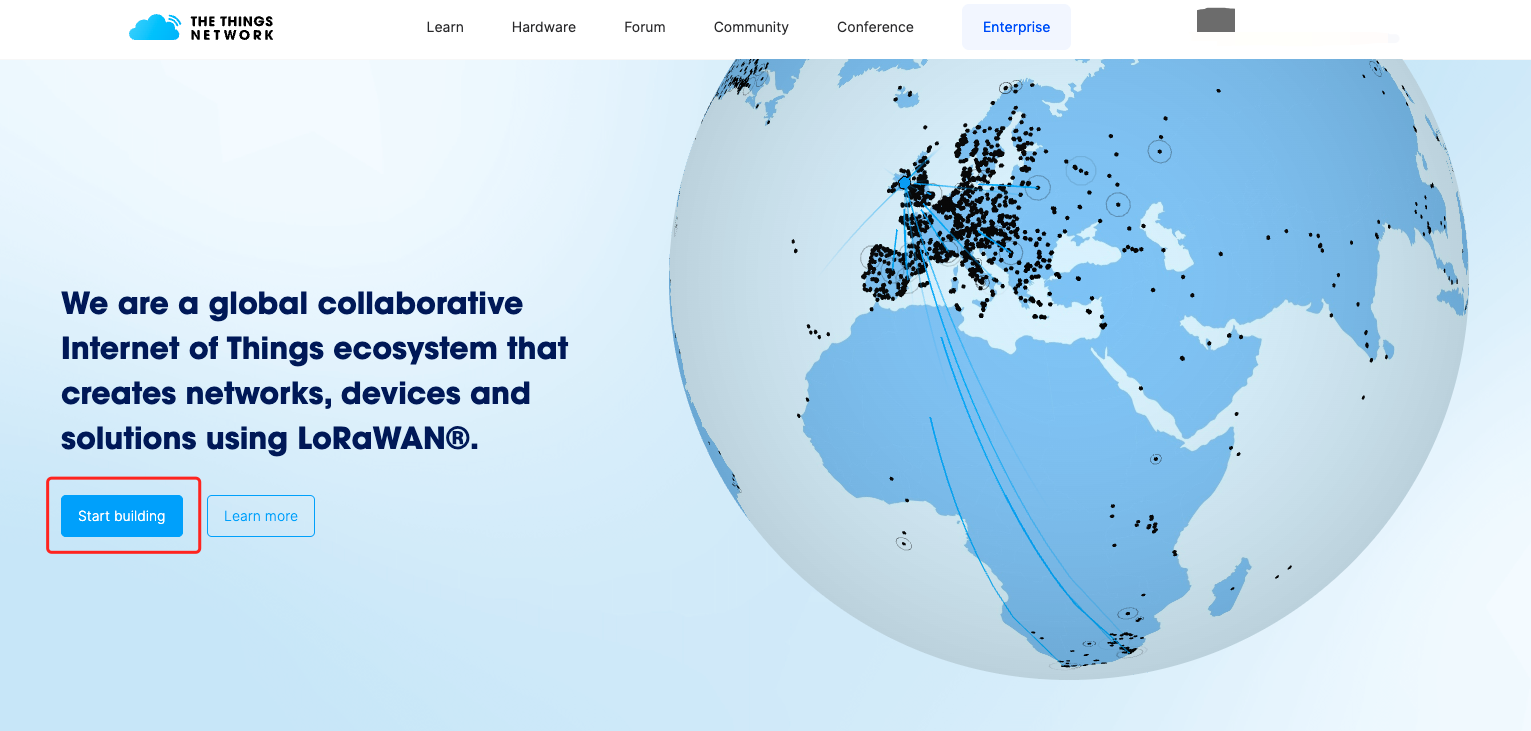
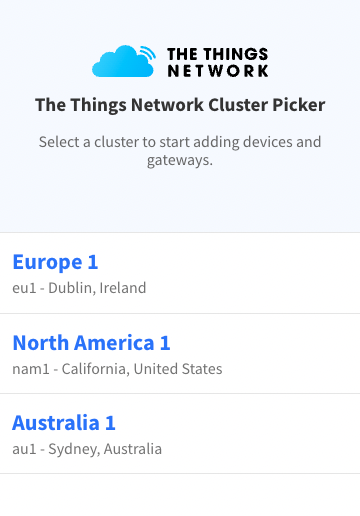
Passo 5. Registre-se no site TTN e faça login na sua conta. Se você não tiver uma, registre-se. Então entre na interface de Gateway e clique em "Get Starting"
Selecione sua região.
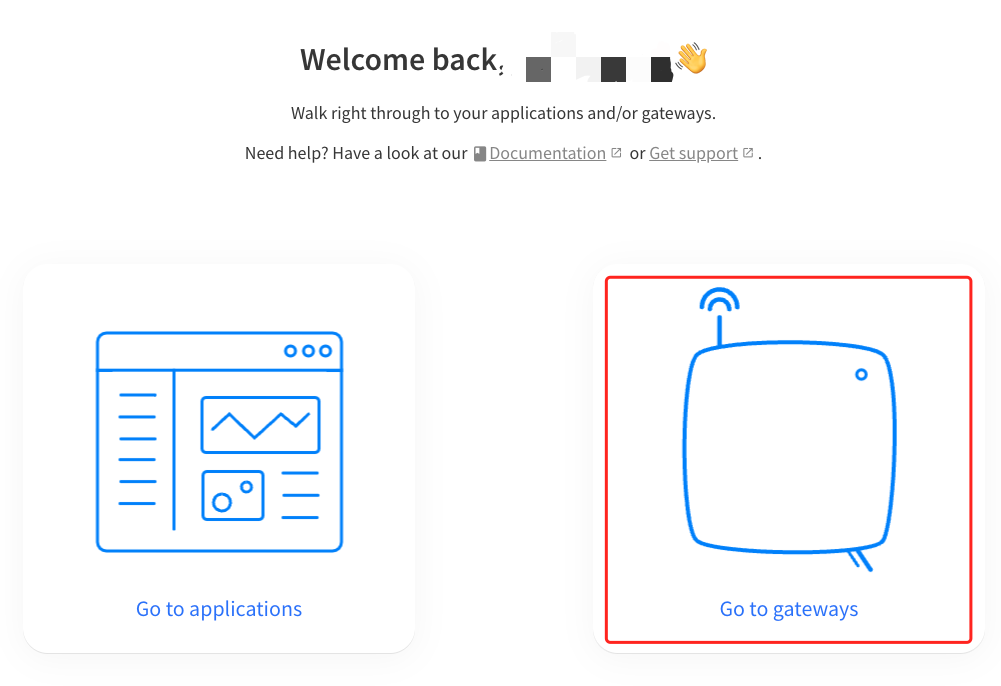
Escolha "Go to gateways"
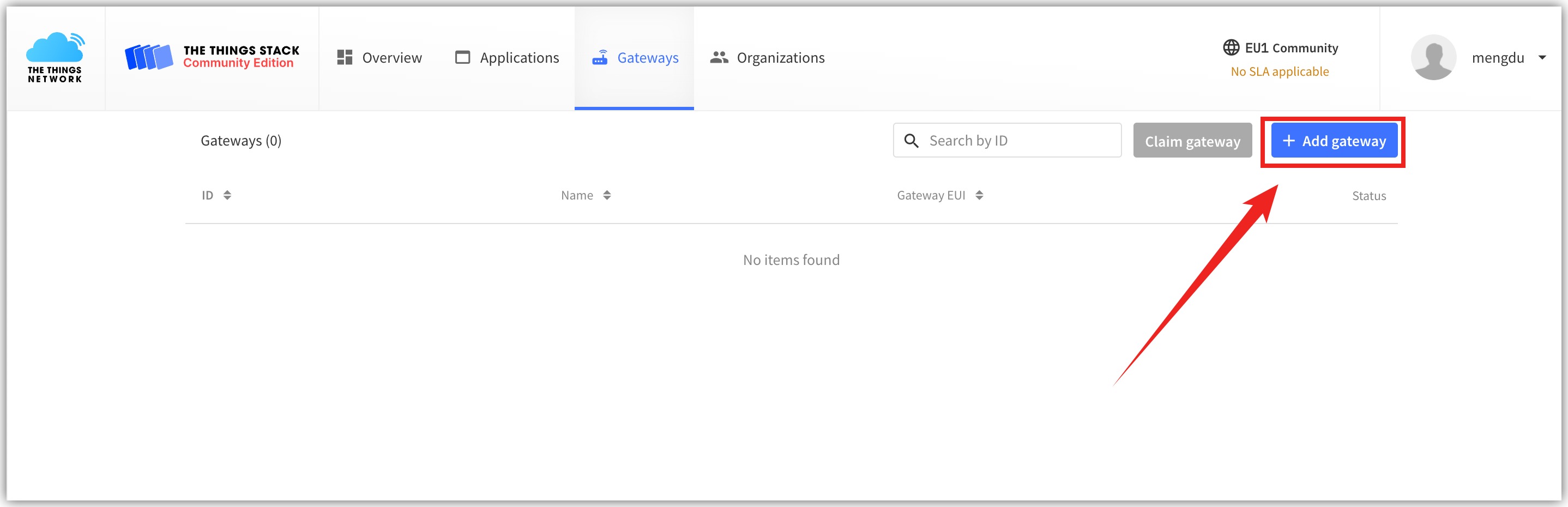
Clique em Add gateway para adicionar o dispositivo:
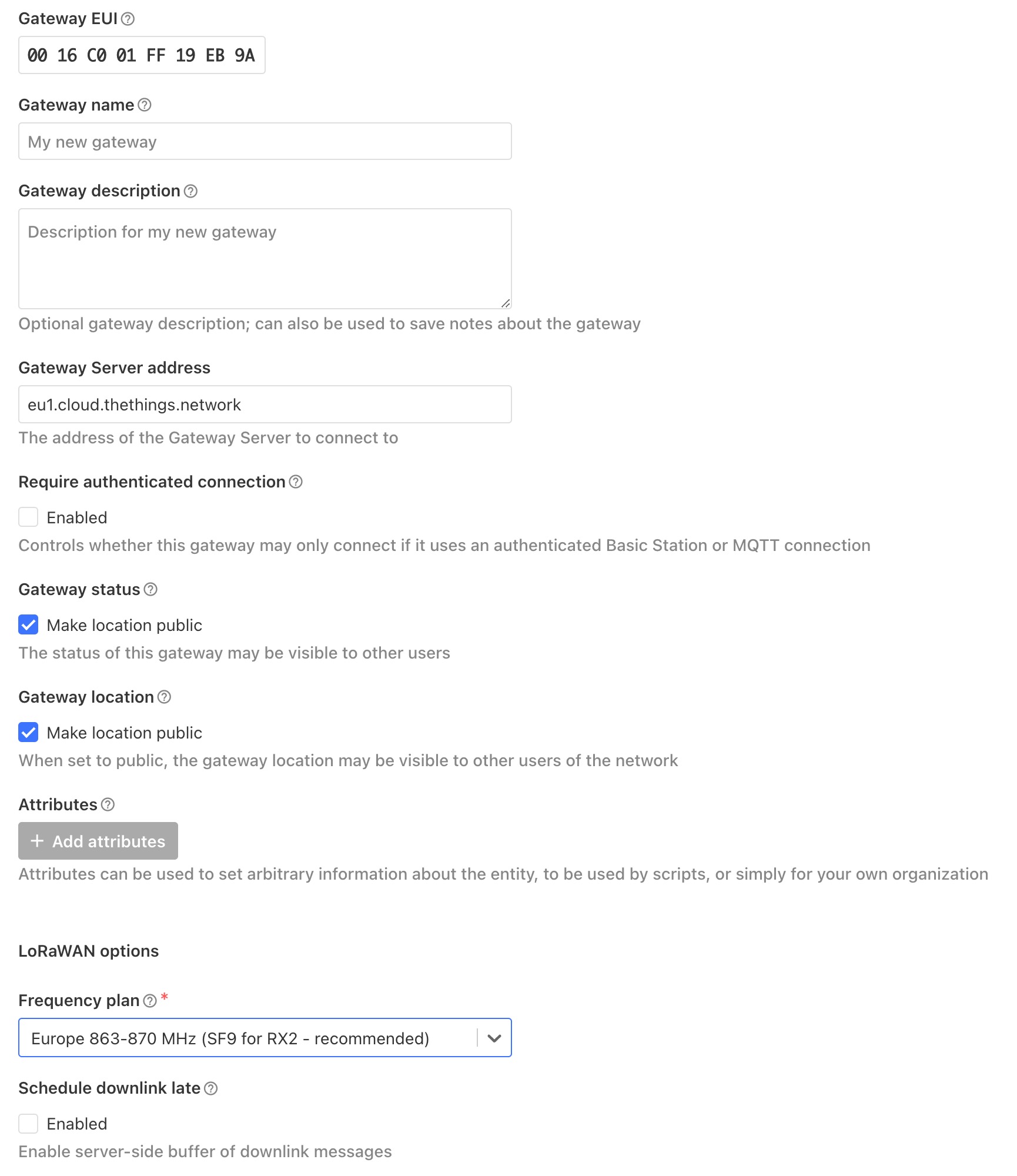
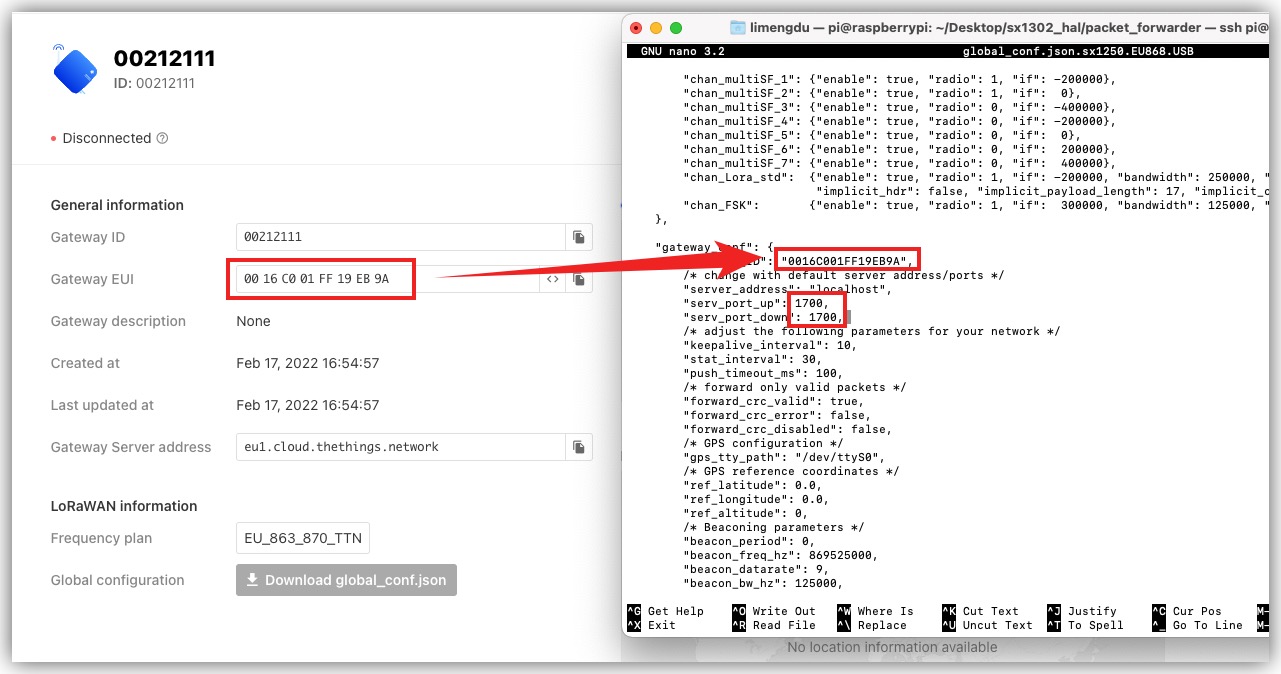
Entre eles, o valor de Gateway EUI será exibido no log quando o teste for executado no passo 4. O Frequency plan em Lora options (tomando a versão europeia como exemplo) selecione Europe 863-870 MHz (SF9 for RX2 - recommended). Em seguida, clique em Create gateway.
Passo 6. (Tomando a versão europeia como exemplo) Se for versão SPI, edite global_conf.json.sx1250.EU868 em sx1302_hal/packet_forwarder.
Se for versão USB, edite global_conf.json.sx1250.EU868.USB em sx1302_hal/packet_forwarder.
Procure por gateway_conf no arquivo correspondente.
-
Em seguida, altere o gateway_ID para o Gateway EUI preenchido na página da web.
-
server_address é modificado para o Gateway Server address na página da web.
-
Tanto serv_port_up quanto serv_port_up são modificados para 1700.
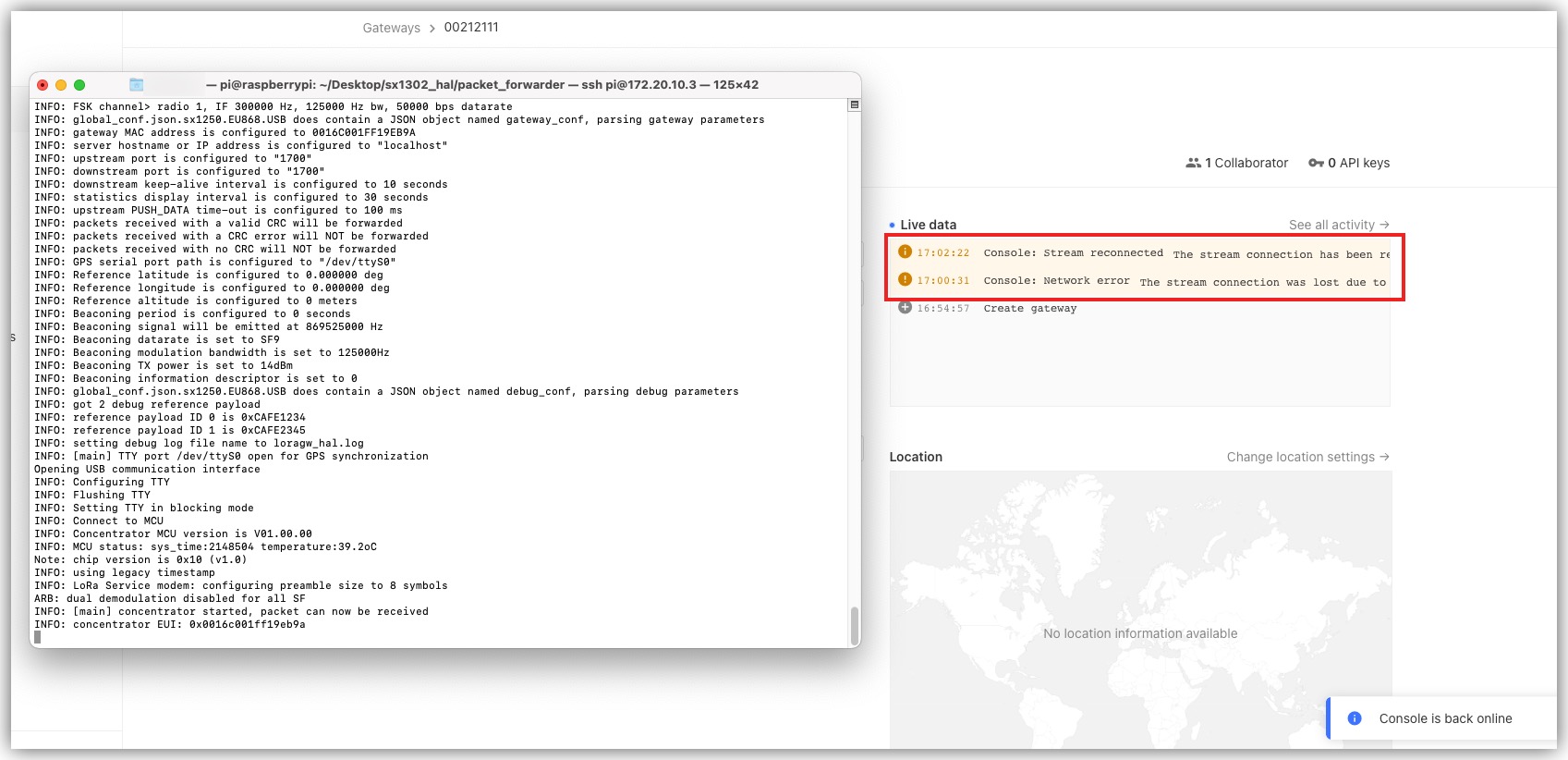
Passo 7. Execute novamente o comando do passo 4 e você poderá ver as informações de conexão do dispositivo na página da web depois.
USB version
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
SPI version
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868
O tutorial acima é baseado na versão europeia do WM1302. Se você estiver usando a versão dos EUA do WM1302, os passos são geralmente os mesmos, mas os arquivos a serem modificados e executados no tutorial serão diferentes. O nome do arquivo se refere à versão que você comprou e às páginas a seguir.
Expansão de Disco Rígido
Materiais Necessários
- reTerminal x1
- reTerminal E10-1 x1
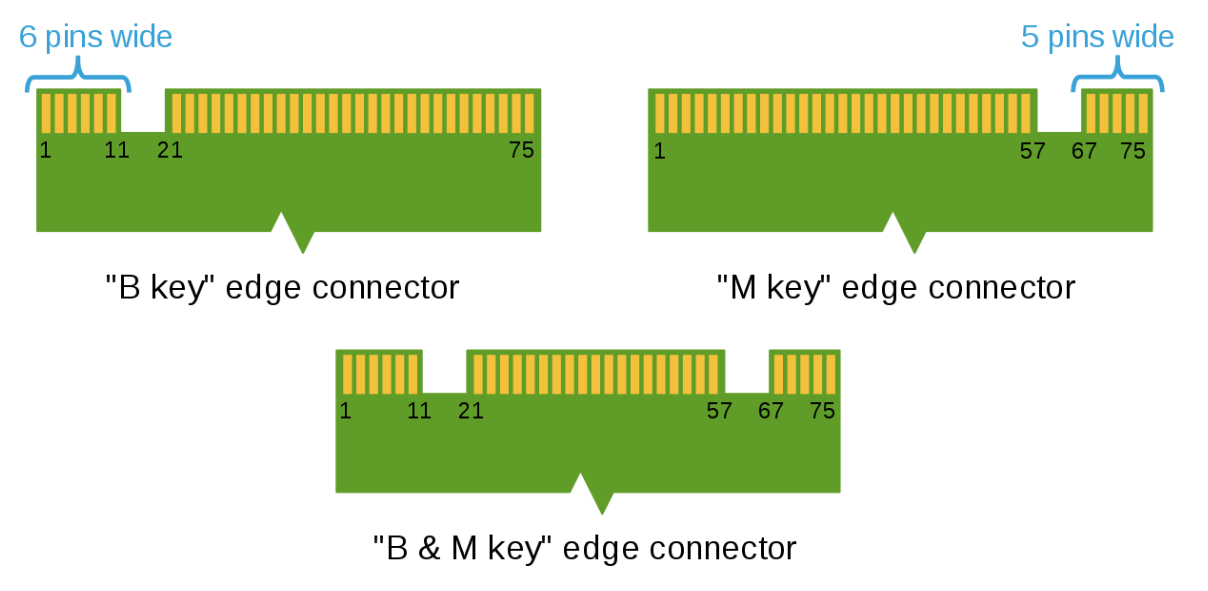
- Conector M.2 chave B x1
Este exemplo apresenta como instalar e verificar o funcionamento do disco rígido no reTerminal E10-1.
Passo 1. Abra a tampa traseira do reTerminal E10-1, insira o M.2 SSD no Conector Mini-PCIe e fixe-o com parafusos. Feche a tampa traseira, conecte o reTerminal e ligue-o.
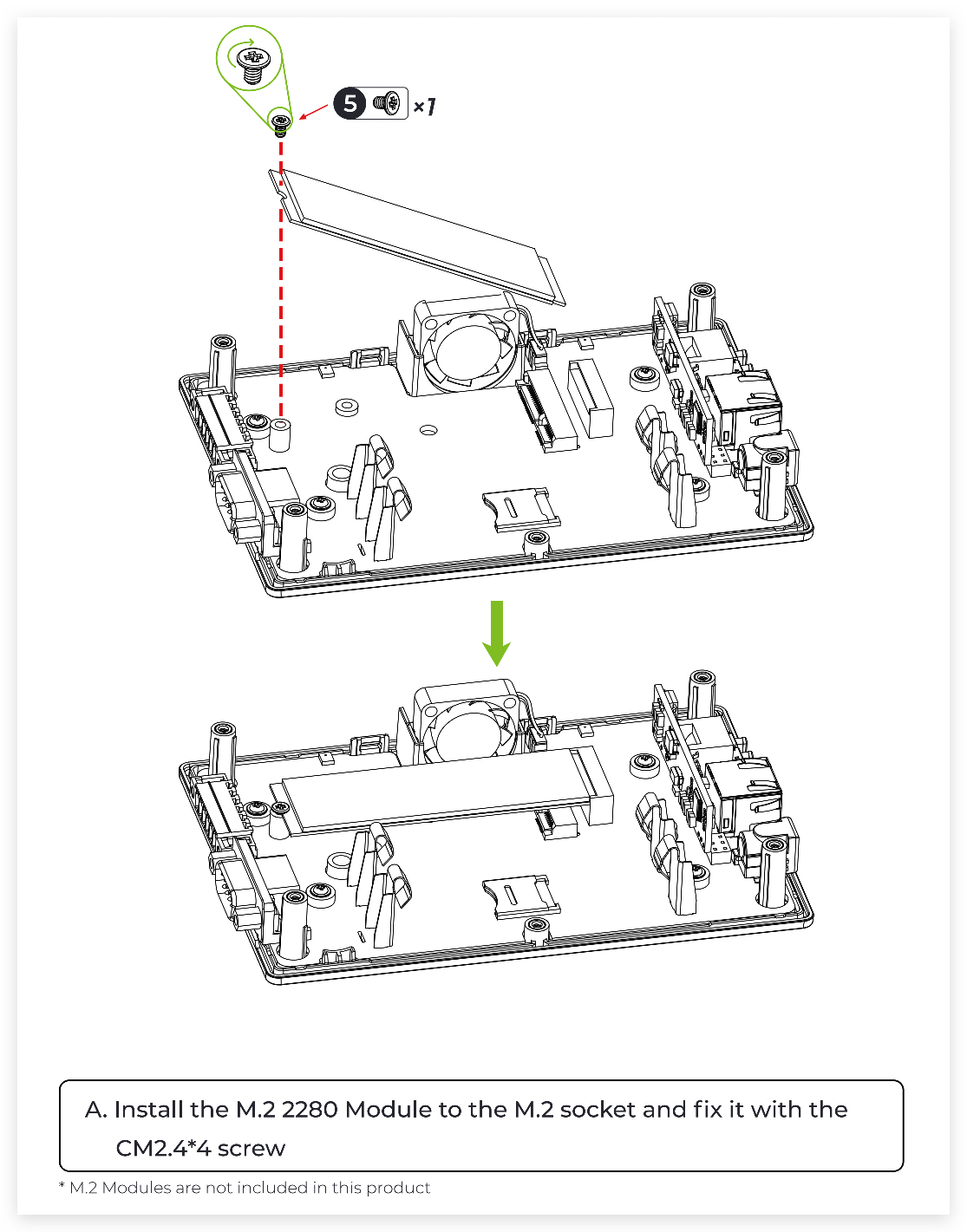

Em seguida, gire o botão ao lado do ventilador para M.2.

Passo 2. Insira o comando para ver se o dispositivo de armazenamento SSD foi detectado.
sudo fdisk -l
Passo 3. Também podemos usar o comando dd para testar a velocidade de leitura e gravação do disco rígido.
Read
$ sudo dd if=/dev/sda3 of=/dev/null bs=512k count=500
Write
$ sudo dd if=/dev/zero of=/dev/sda3 bs=512k count=500
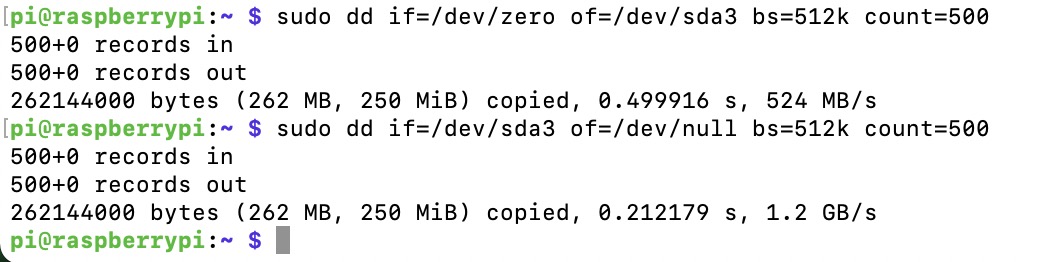
Certifique-se de que você está usando M.2 chave B.
Formatar Disco Rígido
A etapa a seguir apagará todos os seus dados do SSD que você conectou ao reTerminal E10-1, e também se você tiver selecionado a mídia de unidade errada, portanto, certifique-se de ter seguido cuidadosamente as etapas abaixo e de entender o propósito de cada uma delas.
- Ferramentas de Software usadas:
lsblk,fdisk,mkfs,mount,umount
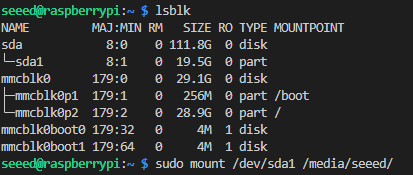
Passo 1. Encontre o Nome do dispositivo SSD Depois de conectar o seu SSD no reTerminal E10-1 e anexá-lo ao reTerminal, abra o terminal quando o sistema tiver sido ligado e digite o seguinte comando:
lsblk
você deverá ver algo semelhante:
Passo 2. Usando fdisk para particionar seu SSD
Você perderá os dados no SSD que anexou ao reTerminal E10-1 após seguir esta etapa.
Seguindo os passos acima, digite o seguinte comando no terminal, observe o /dev/sdX onde o X é o Nome do dispositivo SSD que você escolheu para ser formatado, certifique-se de que não há outras unidades USB conectadas ao reTerminal, a menos que você tenha certeza do nome correto do dispositivo.
sudo fdisk /dev/sdX
Por exemplo, no meu caso:
sudo fdisk /dev/sda
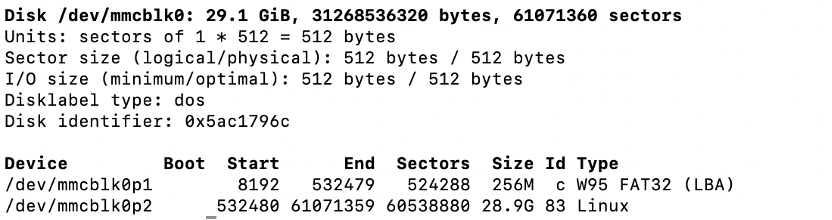
você deverá ver algo semelhante ao mostrado abaixo:
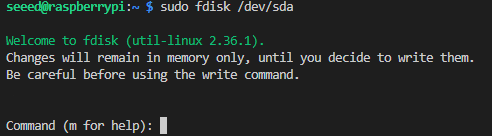
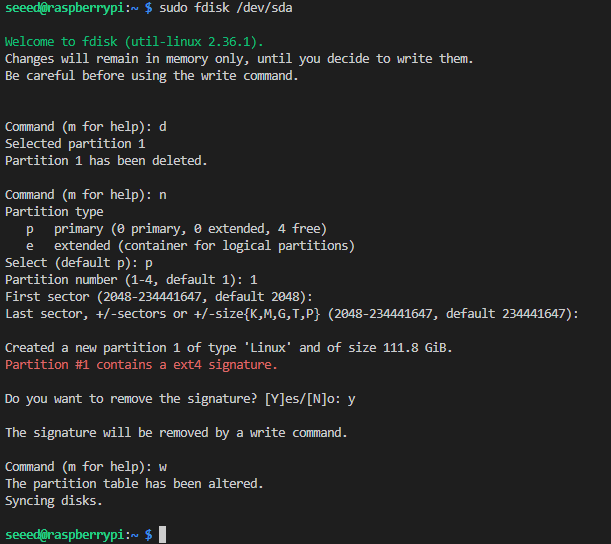
No prompt do fdisk:
Welcome to fdisk (util-linux 2.36.1).
Changes will remain in memory only, until you decide to write them.
Be careful before using the write command.
Command (m for help):
Primeiro digite d para excluir as partições no dispositivo SSD.
Em seguida, digite n para criar uma nova partição no dispositivo SSD.
Depois disso você deve ver a seguinte mensagem:
Partition type
p primary (0 primary, 0 extended, 4 free)
e extended (container for logical partitions)
Digite p para criar uma partição primária, seguido de 1.
Então, para o primeiro setor, você pode pressionar ENTER para o padrão de usar o setor inicial da unidade, ou você pode especificar onde iniciar a partição 1 no seu SSD em um local de setor específico. No meu caso eu apenas pressionei Enter para o valor padrão.
Em seguida, selecione o último setor para a partição 1, se você quiser utilizar todo o espaço da unidade para a partição 1 apenas pressione ENTER, ou você pode digitar o local de setor específico para o final da partição 1, isso também significa o tamanho de armazenamento da partição 1 que você está criando.
Depois pressione Y para remover a assinatura.
Em seguida, pressione w para gravar as alterações e sair do prompt do fdisk.
Aqui está um exemplo do processo:
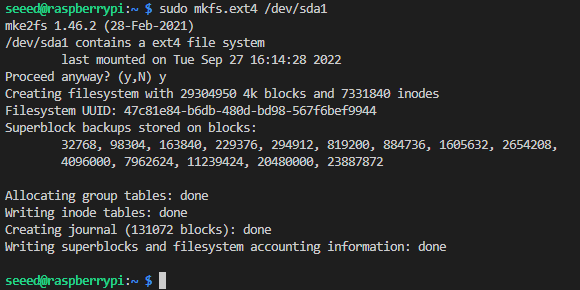
Passo 3. Formatar sua partição SSD para o formato ext4 Agora que você criou uma(s) partição(ões) para o seu SSD, você precisa formatar a(s) partição(ões) para o formato ext4 para poder montá-la(s) e usá-la(s). Para fazer isso usando o mkfs.ext4:
sudo mkfs.ext4 /dev/sdXX
de forma semelhante, onde sdXX é o nome do dispositivo do seu SSD, no meu caso eu usei /dev/sda1 assim:
sudo mkfs.ext4 /dev/sda1
e em Proceed anyway? (y,N) digite y e ENTER, depois aguarde alguns segundos até que o processo termine.
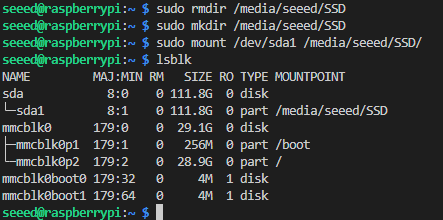
Passo 4. Montar a partição Agora você pode montar o SSD para usar como disco externo para armazenamento extra.
sudo mkdir /media/"YOUR USER NAME"/"THE NAME YOU WANT TO MOUNT THE DRIVE"
sudo mount /dev/sdXX /media/"YOUR USER NAME"/"THE NAME YOU WANT TO MOUNT THE DRIVE"
onde "YOUR USER NAME" é o nome de usuário do seu sistema reTerminal e "THE NAME YOU WANT TO MOUNT THE DRIVE" é o nome que você cria para montar sua unidade, o /dev/sdXX é o nome do dispositivo da partição SSD que você quer montar.
por exemplo, no meu caso:
sudo mkdir /media/seeed/SSD
sudo mount /dev/sda1 /media/seeed/SSD/
Para verificar se o SSD foi montado com sucesso:
lsblk
você deve ver uma saída semelhante à minha, onde o /dev/sda1 está montado em /media/seeed/SSD:
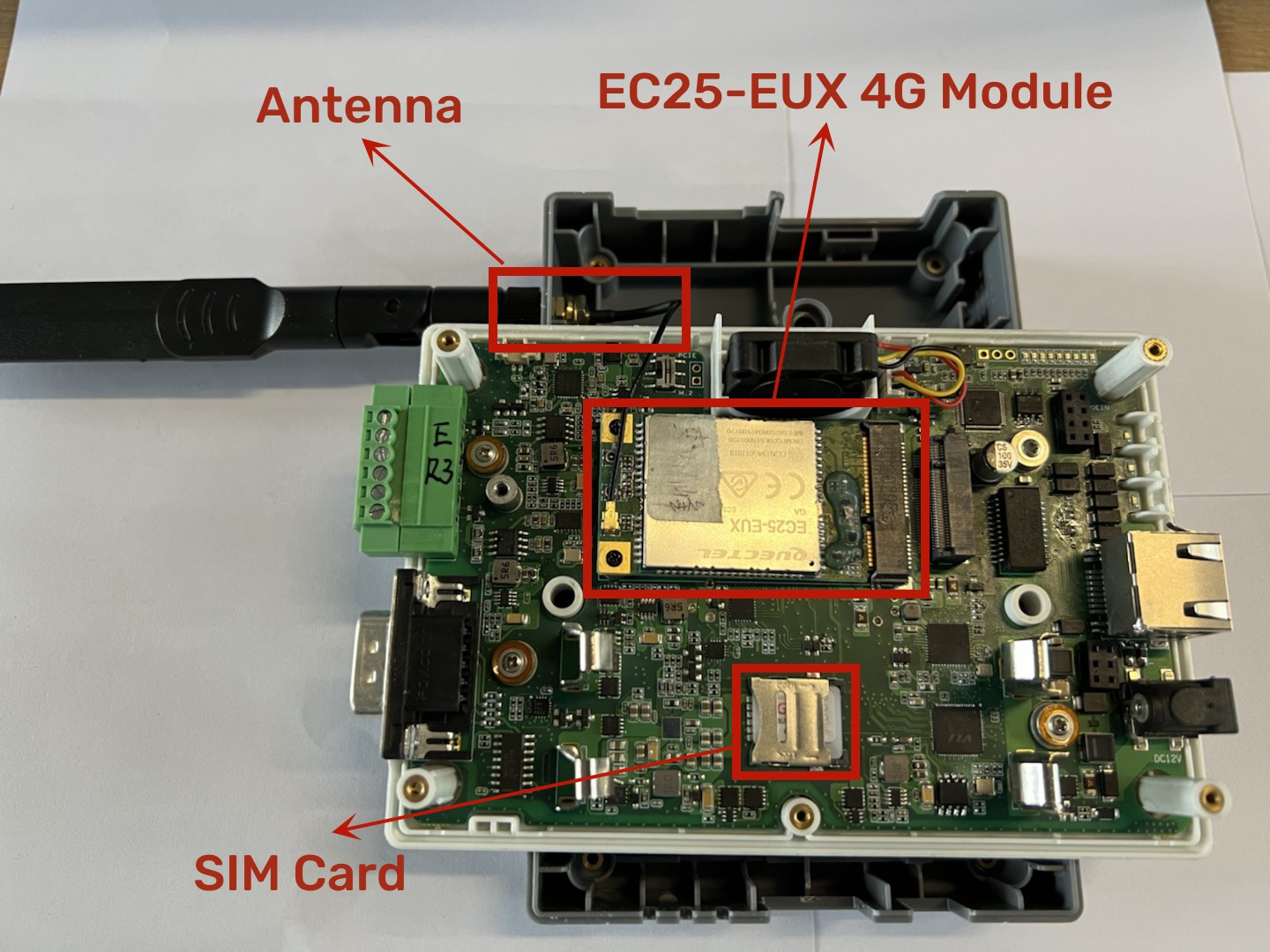
Módulo 4G EC25-EUX
Materiais Necessários
- reTerminal x1
- reTerminal E10-1 x1
- Módulo 4G EC25-EUX x1
- Cartão SIM x1
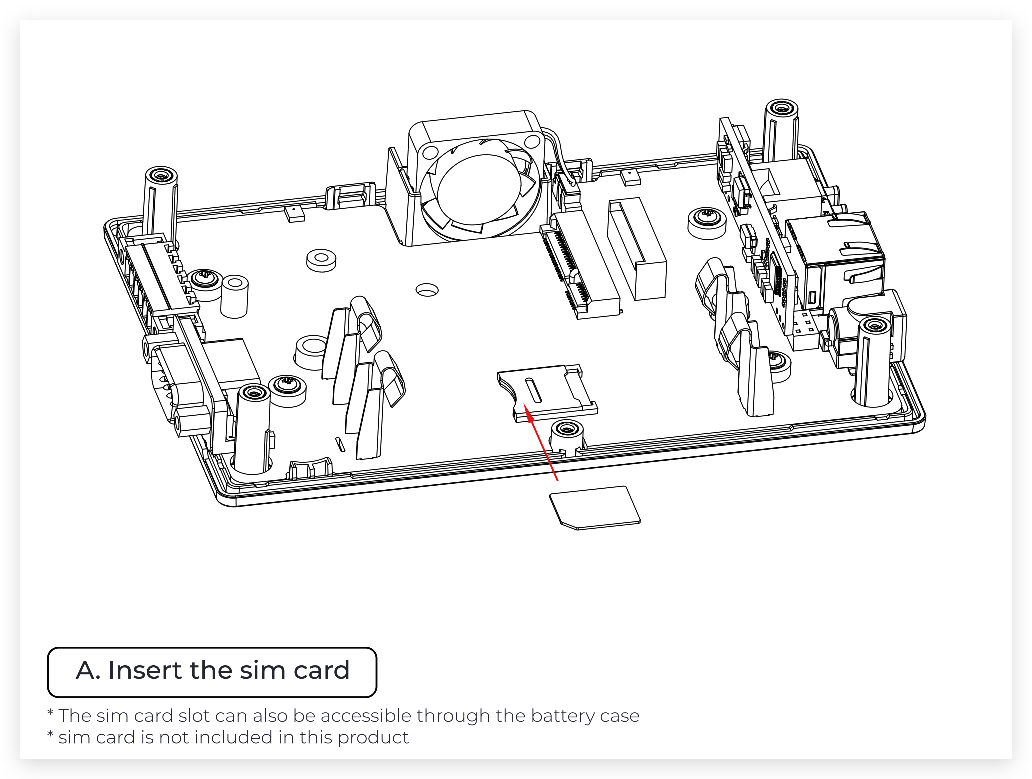
Passo 1. Abra a tampa traseira do reTerminal E10-1 e, em seguida, instale o EC25-EUX e o cartão SIM no reTerminal E10-1.
Em seguida, gire o botão ao lado do ventilador para PCIE.
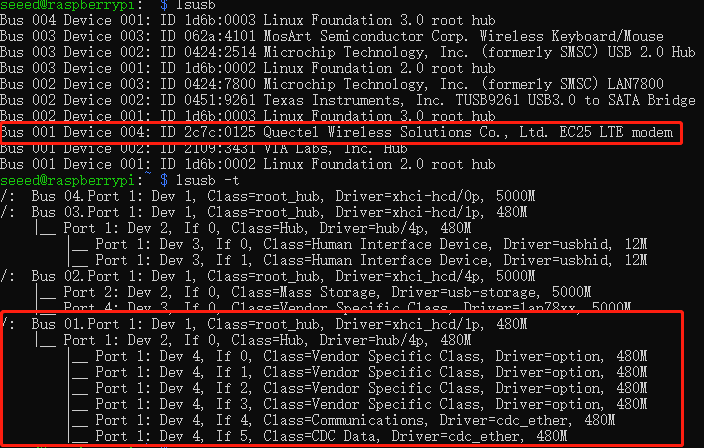
Passo 2. Verifique se o EC25-EUX foi detectado usando lsusb
lsusb
lsusb -t
Passo 3. Instalar a ferramenta de comunicação serial minicom.
sudo apt install minicom
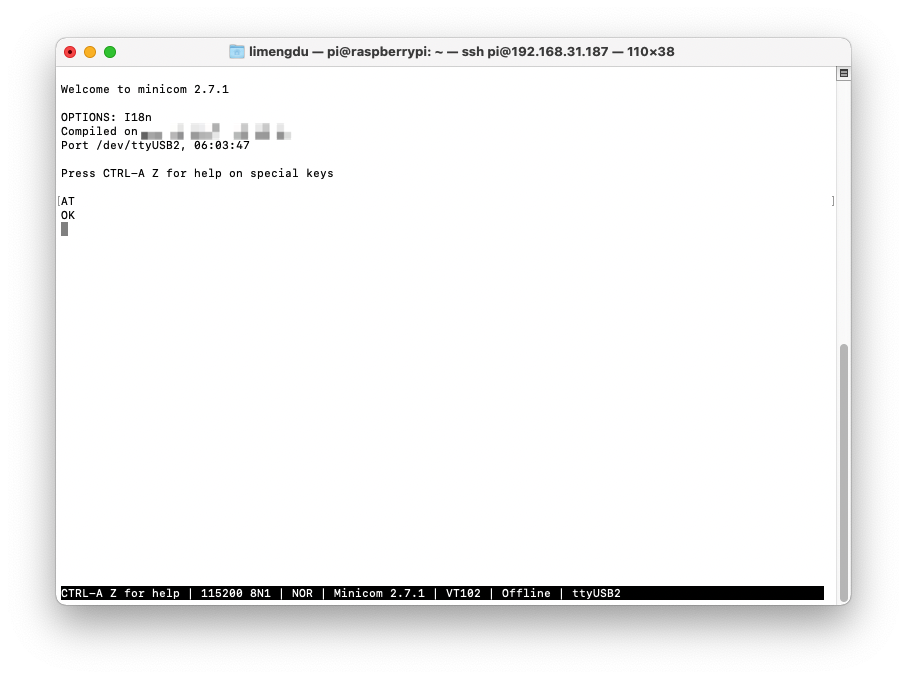
Passo 4. Conectar o módulo 4G EC25-EUX através do minicom.
sudo minicom -D /dev/ttyUSB2 -b 1152008n1
uma vez que a conexão serial for aberta, digite AT e pressione 'Enter', e você deverá ver OK.
Passo 5. Habilitar o módulo 4G para se conectar à rede 4G
Por favor, insira o cartão SIM habilitado para 4G no slot do cartão SIM no suporte da bateria Li-Po, onde o slot do cartão SIM suporta cartão micro SIM, então, se você tiver um cartão nano SIM, precisará encontrar um adaptador de cartão micro SIM para converter para micro SIM.
Na mesma janela serial do minicom, por favor digite:
AT+QCFG="usbnet"
Ele retornará algo como +QCFG: "usbnet",0, mas precisamos que isso esteja definido como 1 (modo ECM), então insira o seguinte comando:
AT+QCFG="usbnet",1
Em seguida, insira o seguinte comando para forçar o modem a reiniciar:
AT+CFUN=1,1
Então você pode reiniciar ou esperar um pouco para o módulo obter internet da sua operadora de cartão SIM.
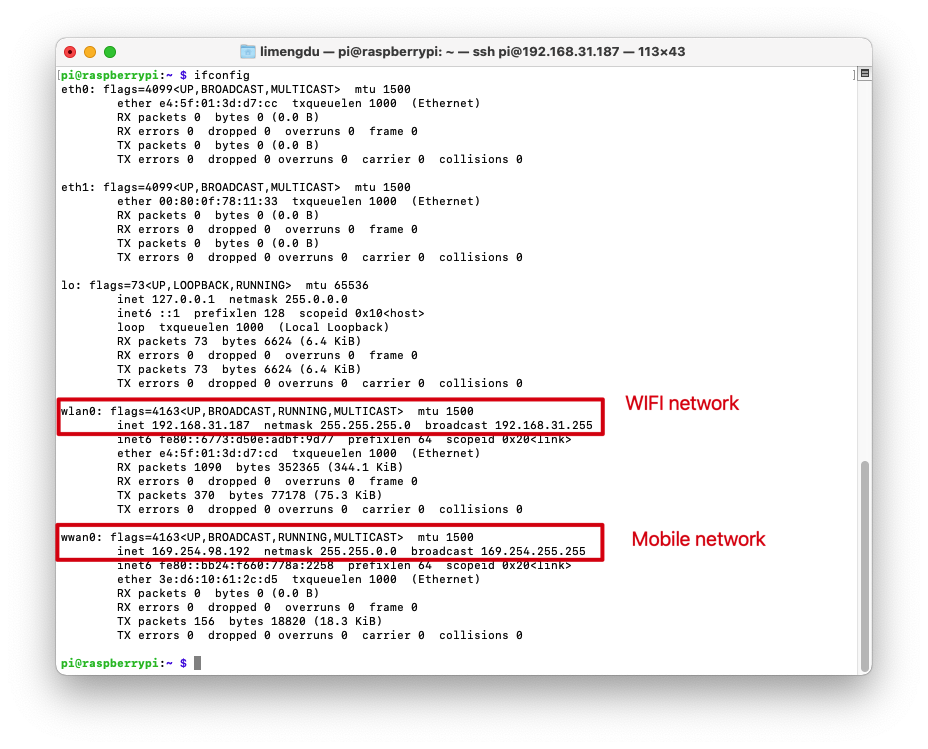
Você também pode usar o comando ifconfig para consultar o status de rede do reTerminal.
Áudio
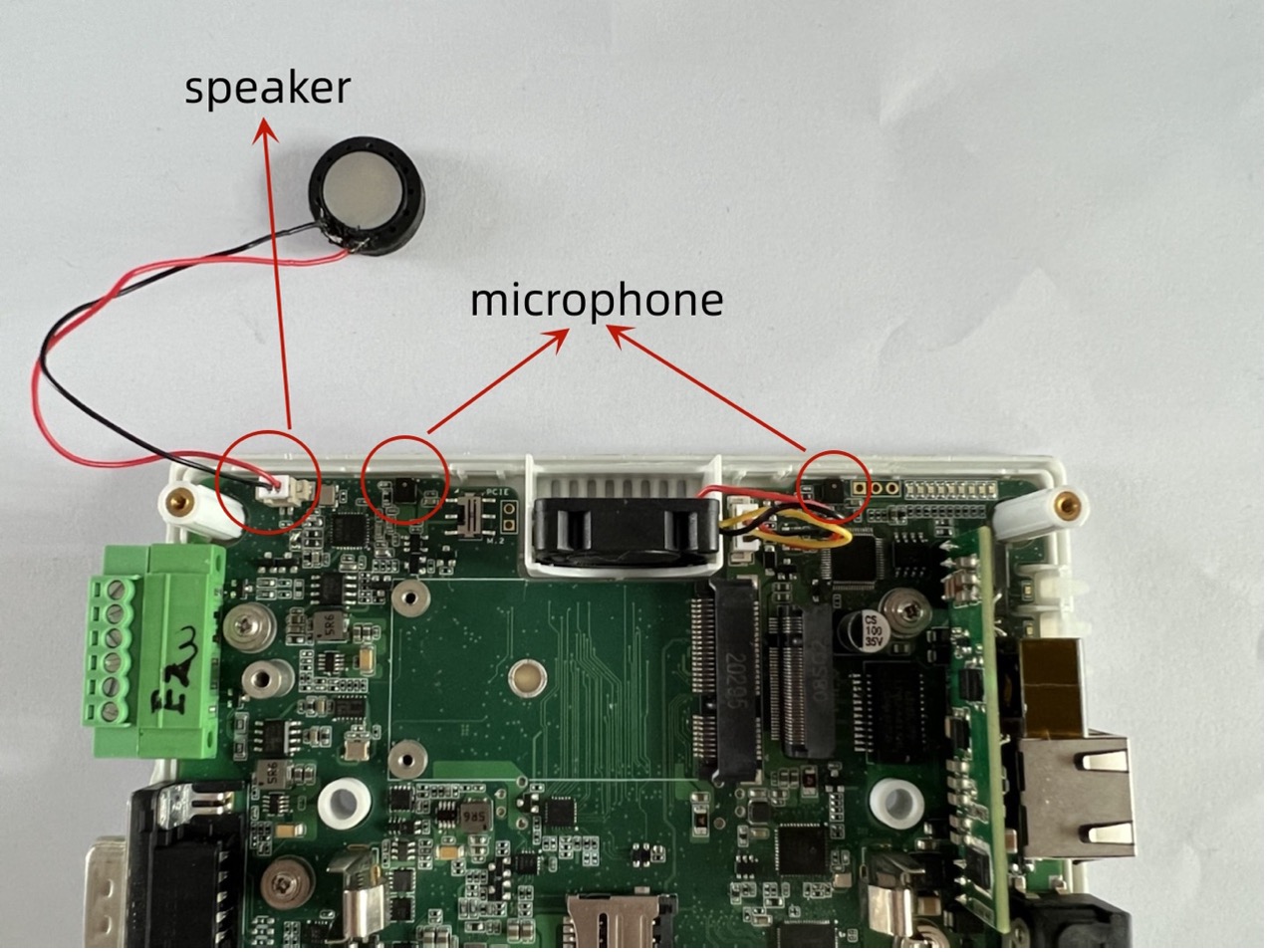
Para atender às necessidades multimídia de diferentes usuários, um módulo de alto-falante e dois módulos de microfone são instalados dentro do reTermnal E10-1 para atender às necessidades de reprodução de som e gravação.
Materiais Necessários
- reTerminal x1
- reTerminal E10-1 x1
Passo 1. Baixar e instalar o driver.
git clone https://github.com/Seeed-Projects/seeed-voicecard.git
cd seeed-voicecard
sudo ./install.sh
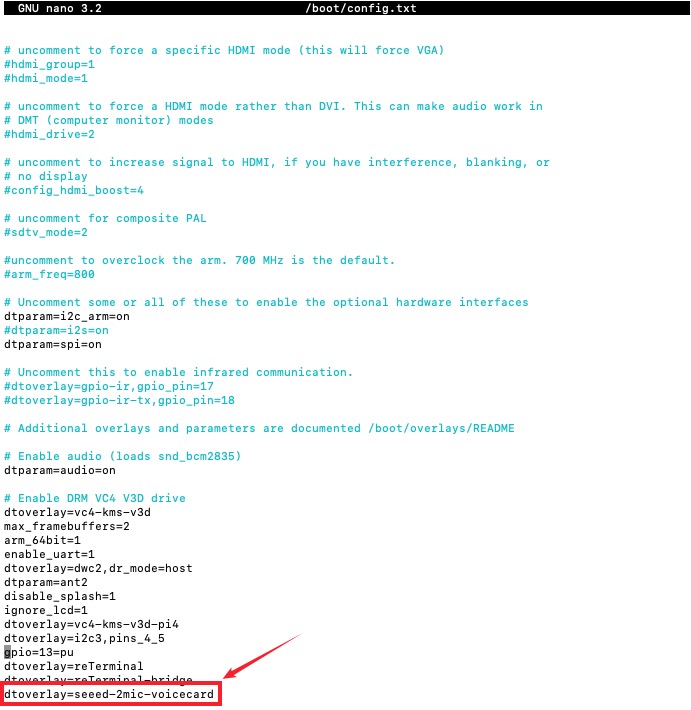
Passo 2. Adicionar itens de configuração. Adicione dtoverlay=seeed-2mic-voicecard ao /boot/config.txt. Em seguida, reinicie o dispositivo.
sudo sed -i '$s/$/\ndtoverlay=seeed-2mic-voicecard/' /boot/config.txt
para verificar se você modificou o /boot/config.txt você pode usar o editor de texto nano para abrir o arquivo e rolar até a última linha para verificar:
nano /boot/config.txt
Depois que isso for adicionado ao /boot/config.txt você pode reiniciar agora:
sudo reboot
Após esperar pela reinicialização, use o comando arecord -l para visualizar o dispositivo de gravação.
arecord -L

Como mostrado na figura acima, card 0 device 0 é o dispositivo que precisamos usar para gravar.
Passo 3. De acordo com as informações acima, use o comando para realizar a operação de gravação e salvamento.
arecord -Dhw:0,0 -d 10 -f cd -r 44100 -c 2 -t wav test.wav
Análise dos Parâmetros
- -D especifica o dispositivo de gravação, 0,0 significa card 0 device 0, que é bcm2835-i2s-wm8960-hifi wm8960-hifi-0.
- -d especifica a duração da gravação, em segundos.
- -f especifica o formato de gravação, suporta apenas cd, cdr, dat.
- -r especifica a taxa de amostragem em Hz.
- -c especifica o número de canais.
- -t especifica o formato de arquivo gerado.
Passo 4. Verificar o dispositivo de reprodução.
aplay -l
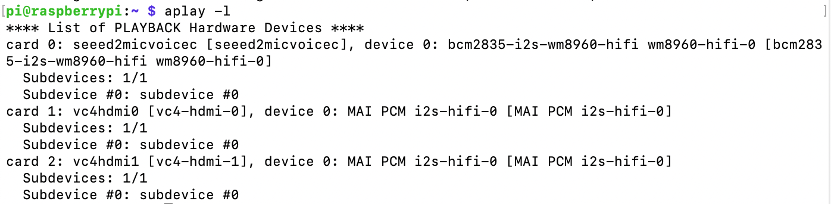
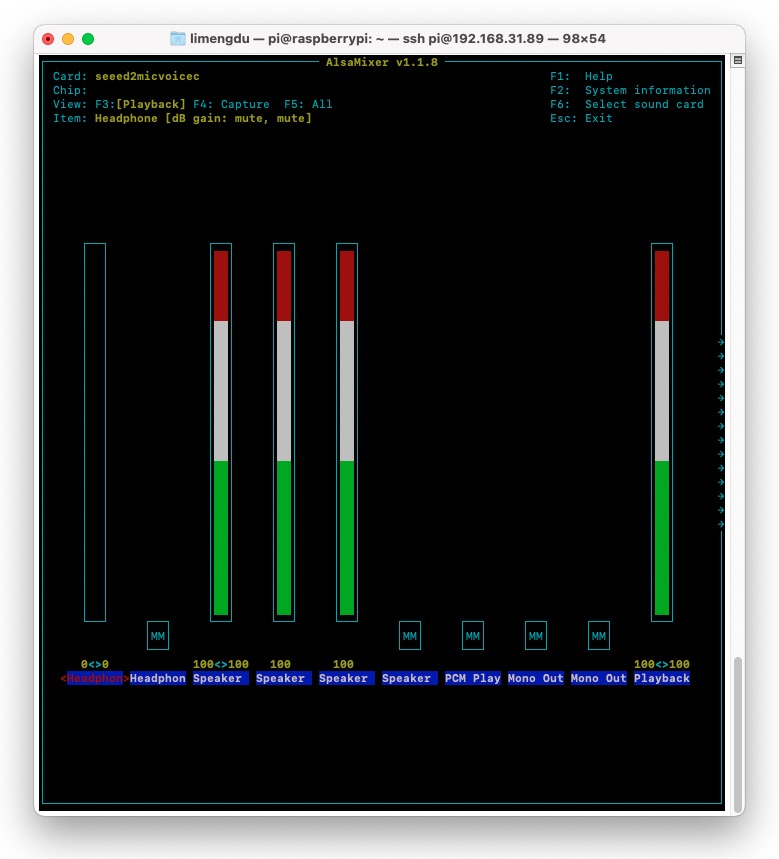
Passo 5. Ajustar o volume apropriado para reproduzir o som.
sudo alsamixer
sudo aplay -Dhw:0 test.wav

FAQ
- Que tipo de baterias 18650 são compatíveis?
Resposta: Panasonic NCR18650B 3.6V 3400mAh é recomendada.
- As baterias precisam ter sua própria proteção contra sobrecorrente/subtensão/sobretensão?
Resposta: Não, porque o reTerminal E10-1 possui circuito de proteção da bateria
- Qual modelo de controladora CAN e RS485 é usado?
Resposta:
- Controladora 485: TP485E
- Controladora CAN: MCP2518FDT-E/QBB
- Instalei o E10 ontem, a informação da bateria (nível de carga) está correta? mostra em vermelho (0%) mesmo se eu acabei de tirá-las do carregador.
Kernel: 5.10.103-v8+ aarch64 bits: 64 Console: tty 0 Distro: Debian GNU/Linux 10
Recurso de exibição de energia: ainda não desenvolvido, mas sua opinião foi ouvida e vamos programar o desenvolvimento desse recurso
- A extensão reTerminal fornece outra porta ethernet (separada) --> então temos duas portas ethernet?
Essas duas portas podem ser usadas simultaneamente sem afetar uma à outra.
- Os RS232 e RS485 são independentes/separados (às vezes, em alguns hardwares, você só pode usar um ...)
Você só pode usar RS232 ou RS485 de cada vez.
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.