Introdução ao reBot Arm B601 × NVIDIA Jetson
Introdução
Uma plataforma de desenvolvimento de IA incorporada tudo-em-um para a nova era da IA Física. À medida que a IA generativa evolui de simplesmente “entender o mundo” para “interagir com o mundo” ativamente, o desenvolvimento em robótica está entrando em uma nova era: IA Física. Para ajudar desenvolvedores, pesquisadores e educadores a acelerar sua jornada em IA incorporada, a Seeed Studio combina o reBot Arm B601 totalmente open source com o avançado NVIDIA Jetson Developer Kit para criar um poderoso bundle de desenvolvimento de robótica de próxima geração.
Este bundle oferece não apenas capacidades precisas de manipulação robótica, mas também o enorme poder de computação de IA necessário para executar modelos de IA multimodais, modelos visão-linguagem (VLMs) e inferência robótica em tempo real localmente na borda. É uma plataforma completa para construir a próxima onda de robôs inteligentes — desde aprendizado e pesquisa até prototipagem rápida e implantação.
| reBot Arm B601 DM | reBot Arm B601 RS |
|---|---|
 |  |
| NVIDIA® Jetson AGX Thor™ Developer Kit | reComputer Classic J3011 |
 |  |
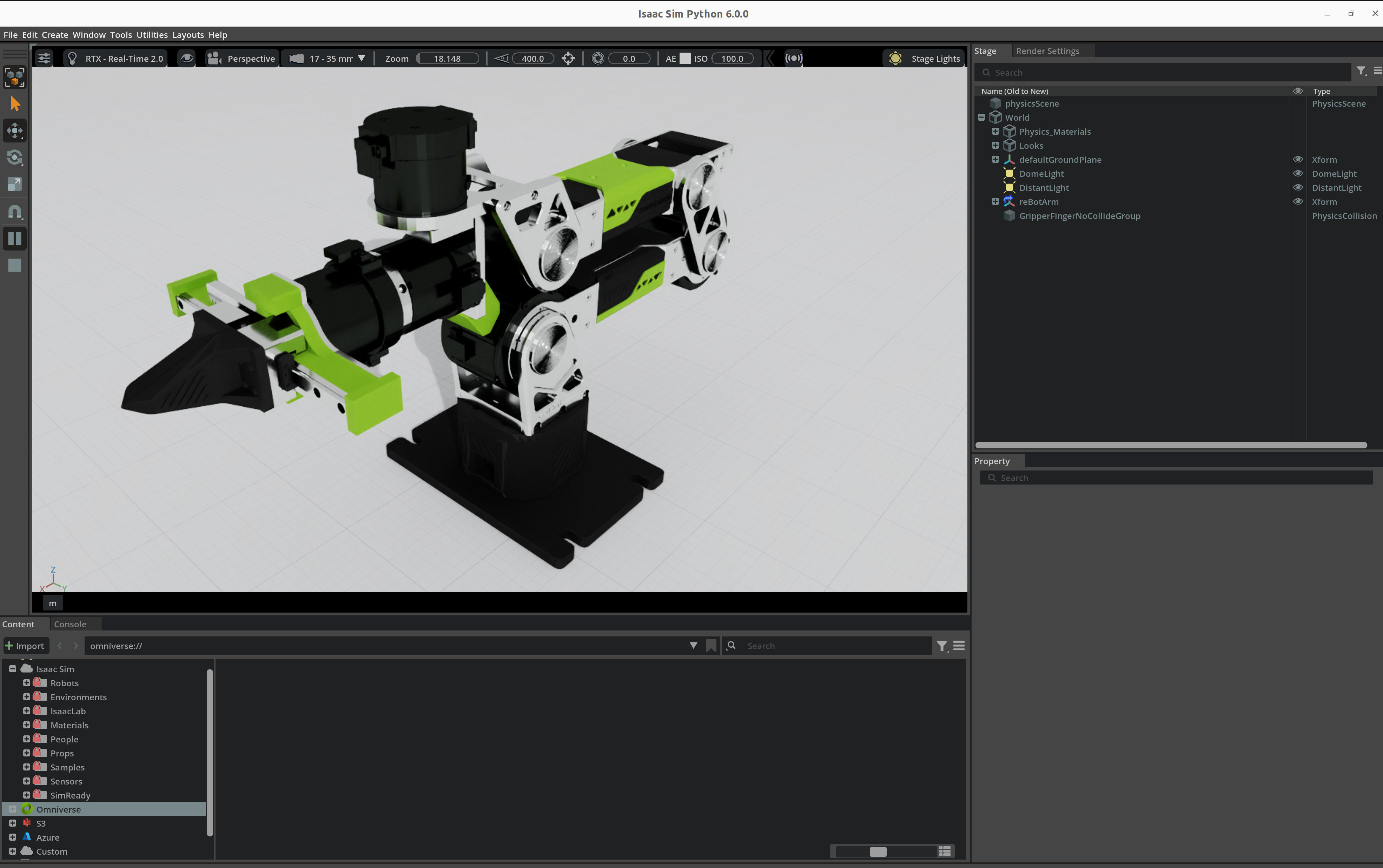
Aqui, usamos o NVIDIA Jetson Thor como exemplo para demonstrar como controlar rapidamente o braço robótico reBot Arm B601 com o Jetson. Você também pode escolher outros dispositivos Jetson com base em suas necessidades específicas.
Por que este bundle?
Uma plataforma completa de desenvolvimento de IA incorporada
O desenvolvimento tradicional em robótica geralmente apresenta várias limitações:
- Ecossistemas de hardware fechados
- Poder de computação de IA insuficiente
- Pilhas de software fragmentadas
- Altas barreiras de desenvolvimento
- Dificuldade em validar cenários reais de IA Física
O reBot Arm × Jetson Bundle foi projetado para resolver esses desafios.
Com este bundle, você obtém:
- Uma plataforma de braço robótico totalmente open source com 6+1 DoF
- A principal plataforma de computação de IA de borda da NVIDIA, alimentada por GPU
- Suporte nativo para ROS1, ROS2, Isaac Sim e LeRobot
- Pronto para fluxos de trabalho de IA multimodal e IA generativa
- Um ambiente unificado para educação, pesquisa e prototipagem em robótica com IA
Primeiros passos
Conexão de hardware
- Consulte este guia para montar o braço robótico.
- Use um adaptador USB-para-CAN para conectar o braço robótico ao NVIDIA Jetson pela interface Type-C.
Instalar driver do braço com um clique
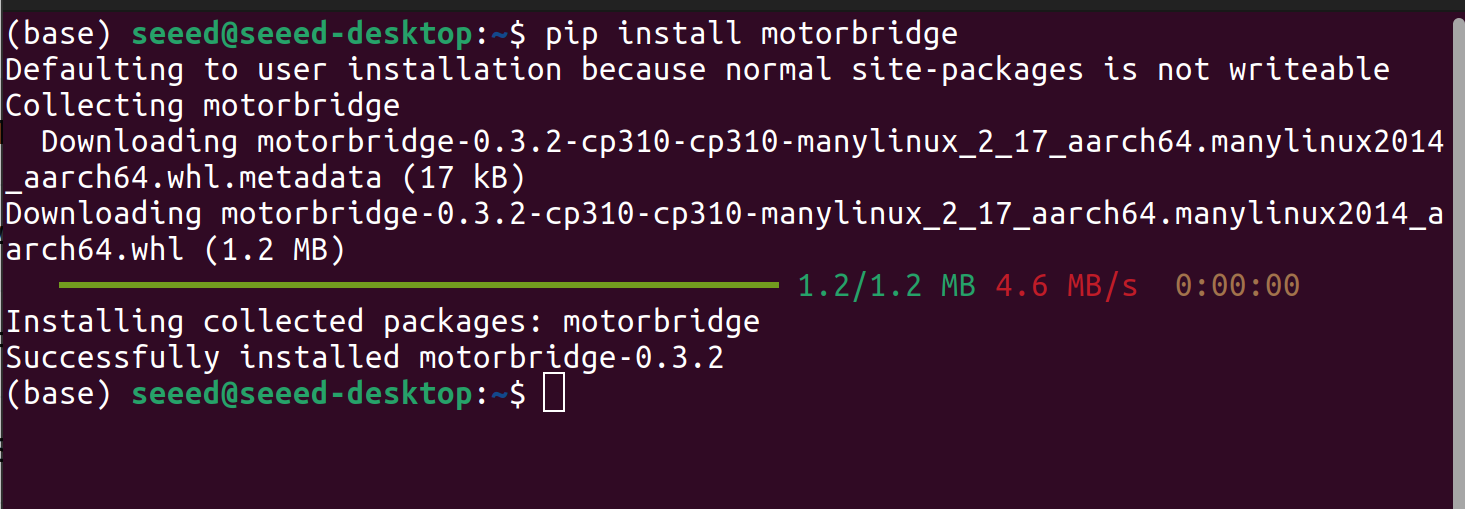
Abra a janela do terminal no Jetson e execute o seguinte comando.
uv pip install motorbridge
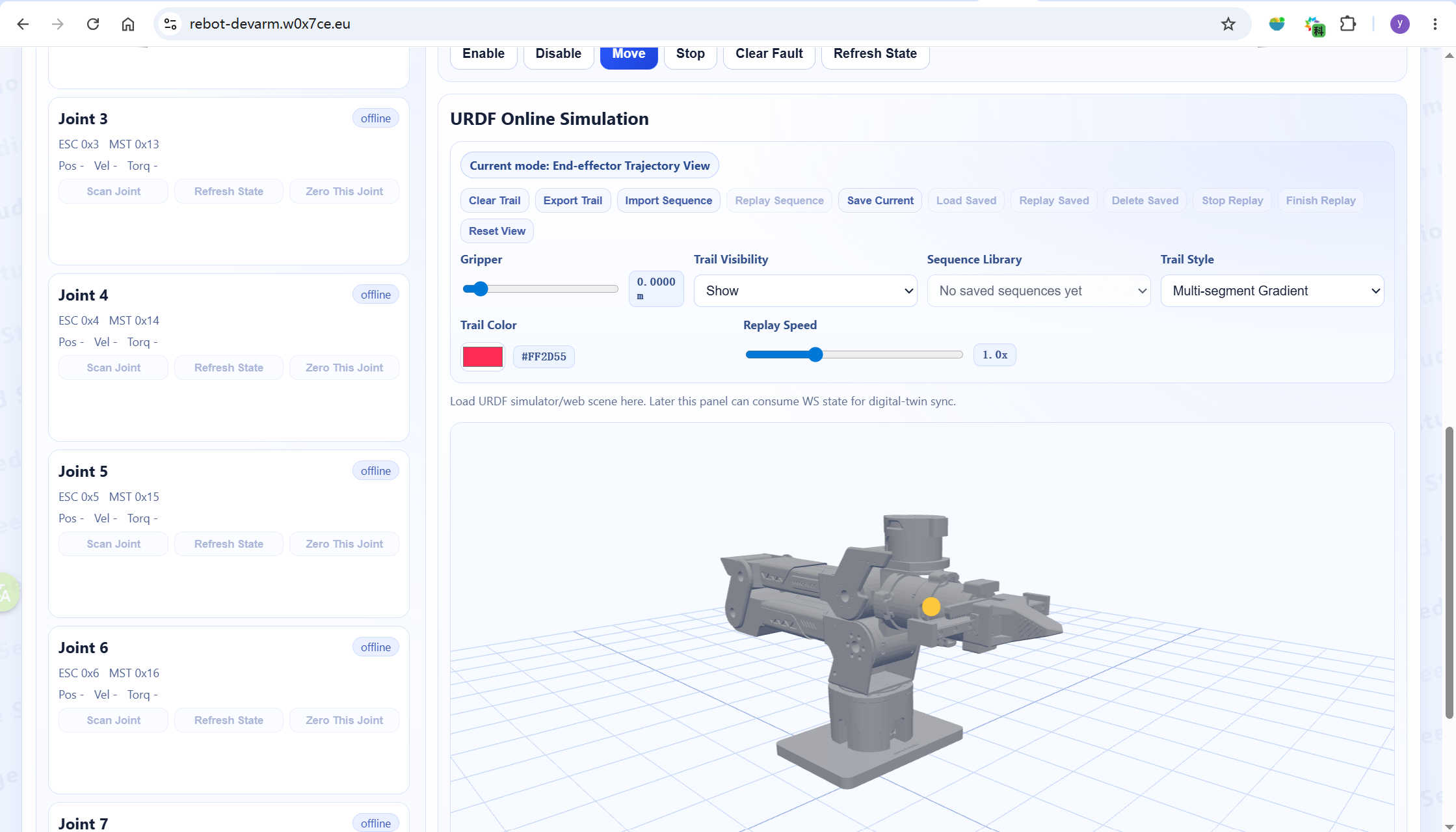
WebUI
execute este comando no Nvidia Jetson:
motorbridge-gateway --bind 127.0.0.1:9002 --vendor damiao --transport dm-serial --serial-port /dev/ttyACM0 --serial-baud 921600 --dt-ms 20
Em seguida, abra https://motorbridge.github.io/motorbridge-studio/ no seu navegador, e você verá a seguinte página. A partir dessa interface, você pode ajustar parâmetros do motor, verificar o status do braço robótico e realizar outras operações.
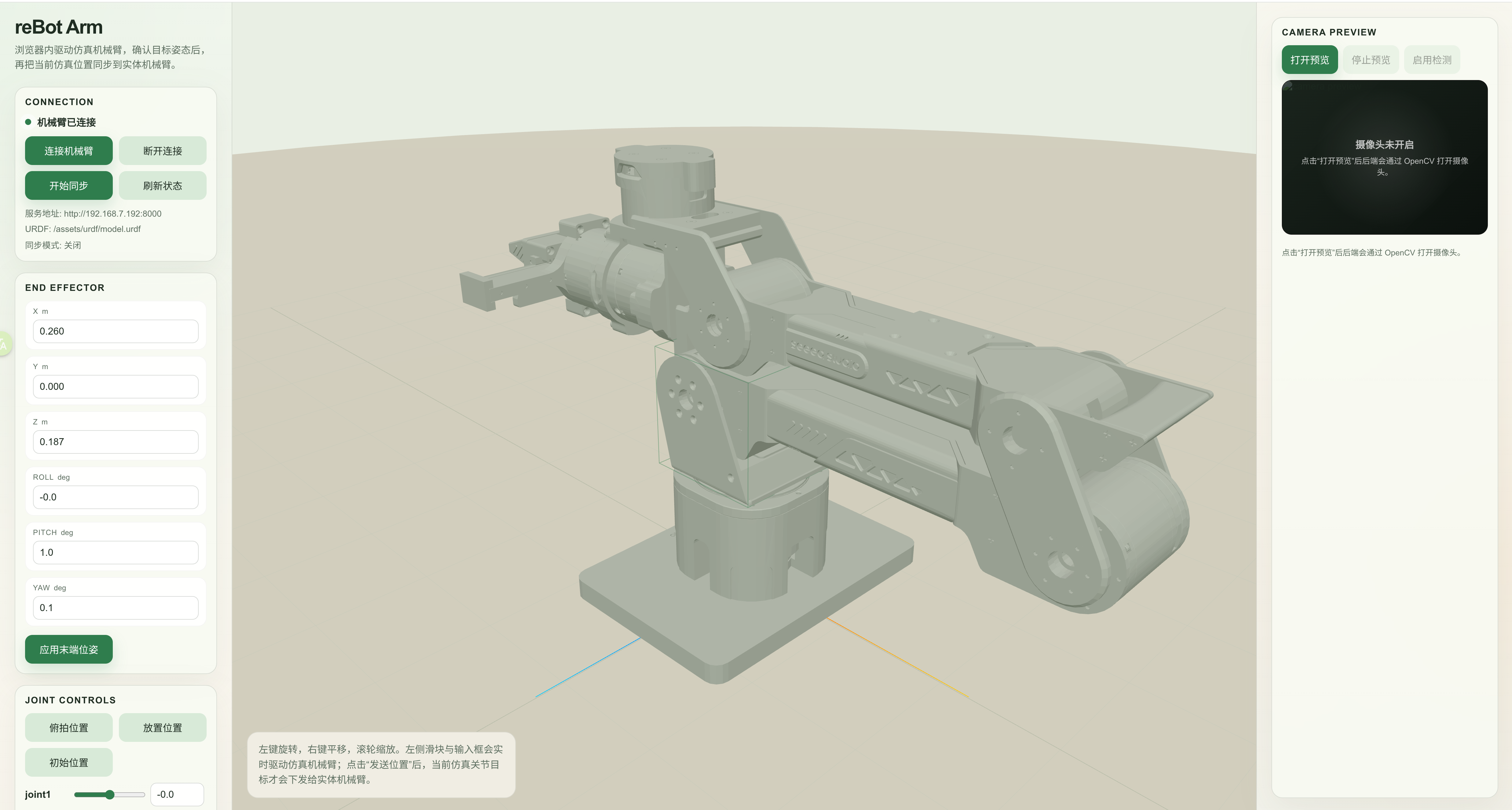
Aplicação



Suporte técnico e discussão sobre o produto
Obrigado por escolher nossos produtos! Estamos aqui para oferecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.