Começando com o reBot Arm B601-DM

![]()
![]()
![]()
![]()
Braço Robótico 6-DOF · Suporte a Múltiplos Motores · Solução de Cinemática · Planejamento de Trajetória · Totalmente Open Source
O conteúdo deste guia está chegando até você à velocidade da luz — fique ligado!
O projeto reBot Arm foi disponibilizado como open source no GitHub. Este guia irá conduzi-lo pelo início rápido do B601-DM, desde a montagem até a operação.
Se você comprou um kit pré-montado, pule diretamente para o vídeo tutorial no Passo 3 no final deste artigo e siga as instruções. Não é necessário gravar IDs dos motores nem calibrar as posições de zero.
Foi verificado que o desempenho de máquinas virtuais é insuficiente para executar os demos e há problemas de configuração. Recomenda-se usar uma máquina física com Ubuntu para controlar o braço robótico.
Opções de Compra
O reBot Arm B601-DM está disponível em várias configurações para atender às diferentes necessidades dos usuários.
Comparação das Opções
| Configuração | Corpo | Garra | Motores | Estrutura | Link de Compra |
|---|---|---|---|---|---|
| Kit Completo | ✅ | ✅ | ✅ | ✅ | Coming Soon |
| Apenas Garra | ❌ | ✅ | ❌ | ❌ | Coming Soon |
| Apenas Corpo (Estrutura) | ✅ | ❌ | ❌ | ✅ | Coming Soon |
| Apenas Corpo (Motores) | ✅ | ❌ | ✅ | ❌ | Coming Soon |
Aviso de Segurança e Notificação de Risco
Sobre a Fonte de Alimentação
- O braço robótico não é enviado com fonte de alimentação / não inclui fonte de alimentação por padrão. Você pode conectar uma bateria por conta própria ou adquirir nossa Fonte de Alimentação MeanWell 24V 14.6A Open Source ou pela Amazon. Não adquira fontes de alimentação de fabricantes sem marca ou por canais inseguros. Quaisquer riscos ou consequências decorrentes disso serão de responsabilidade do próprio indivíduo.
Se a tensão da sua residência for 220V, ajuste a chave seletora de tensão na lateral da fonte para 230V. Se a tensão da sua residência for 110V, ajuste-a para 115V.
| 220V | 110V |
|---|---|
 |  |

-
Como alternativa, você pode escolher nosso gabinete open source para fonte de alimentação MeanWell 24V 14.6A para montagem própria. As instruções em texto e a BOM estão em open source no repositório GitHub (recomendado apenas para desenvolvedores com experiência relevante em montagem de fontes de alimentação).
Vídeo de referência de montagem:
Passo 1: Guia de Montagem
Antes da Montagem:
-
Leia atentamente as instruções a seguir para garantir um processo de montagem tranquilo.
- Este kit inclui vários parafusos e peças com aparência semelhante. Verifique as especificações e a orientação antes de apertar.
- O vídeo foi gravado no início de abril. Podem existir pequenas atualizações, mas a montagem permanece a mesma. Considere as peças enviadas como referência final.
- Os parafusos enviados possuem trava química aplicada. Use ferramentas adequadas ou uma parafusadeira elétrica (recomendado). Ajuste o torque para (3–6 kgf·cm) para evitar espanar. Se ocorrer espanar, pare imediatamente e substitua ou realinhe o parafuso. Parafusos com trava química espanados são difíceis de remover e podem danificar as peças.
- Garanta a segurança durante a montagem. Evite beliscões ou ferimentos. Crianças devem estar sob supervisão.
dicaLembrete: O D4 * 7 entre o motor 5 e o motor 6 no vídeo de montagem não precisa ser instalado. Isso é um erro no vídeo. Se você comprou a versão DIY do reBot Arm B601-DM, os 7 parafusos D4 * 7 são suficientes para concluir a montagem.
Passo 2: Redefinir ID dos Motores
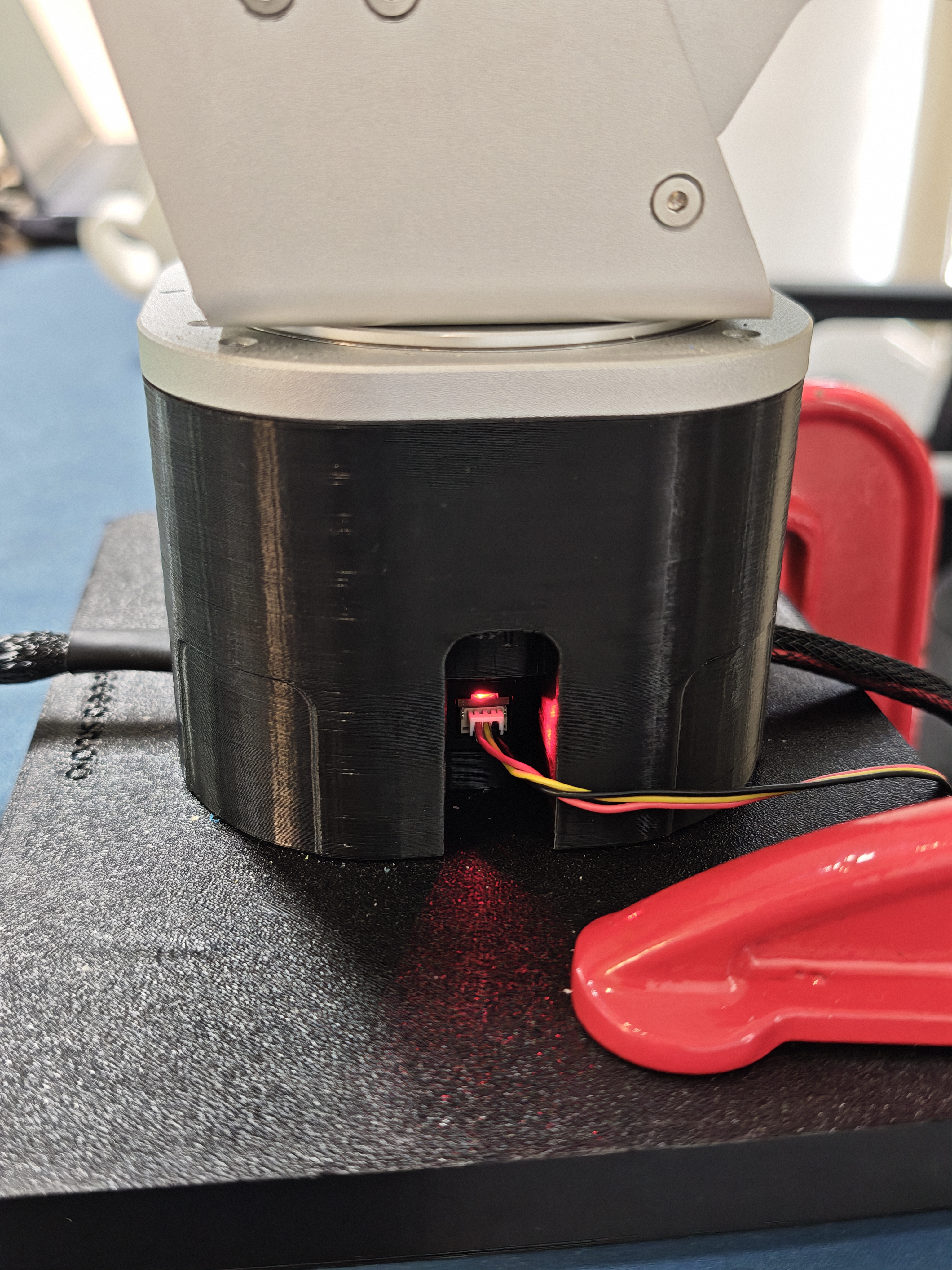
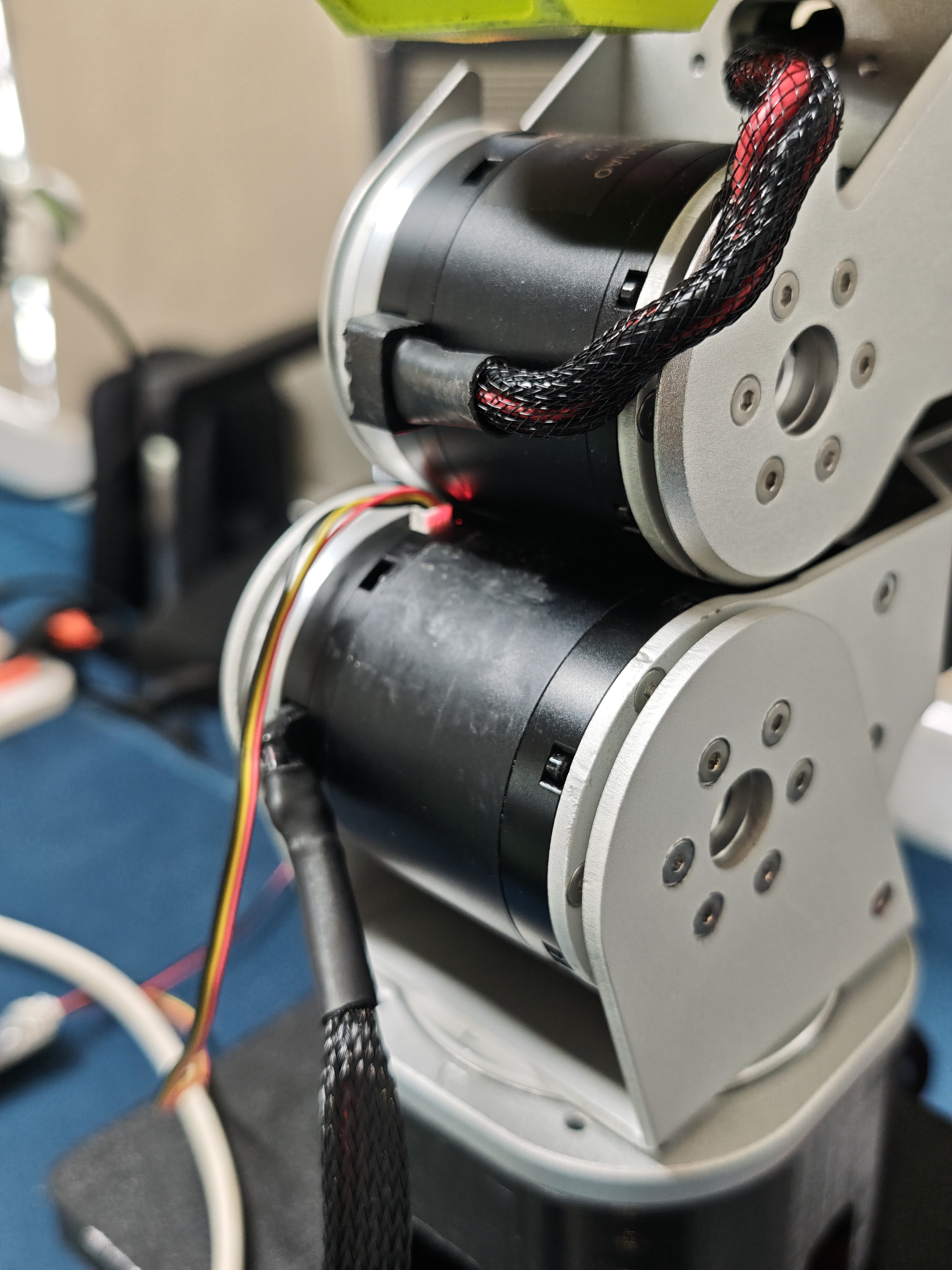
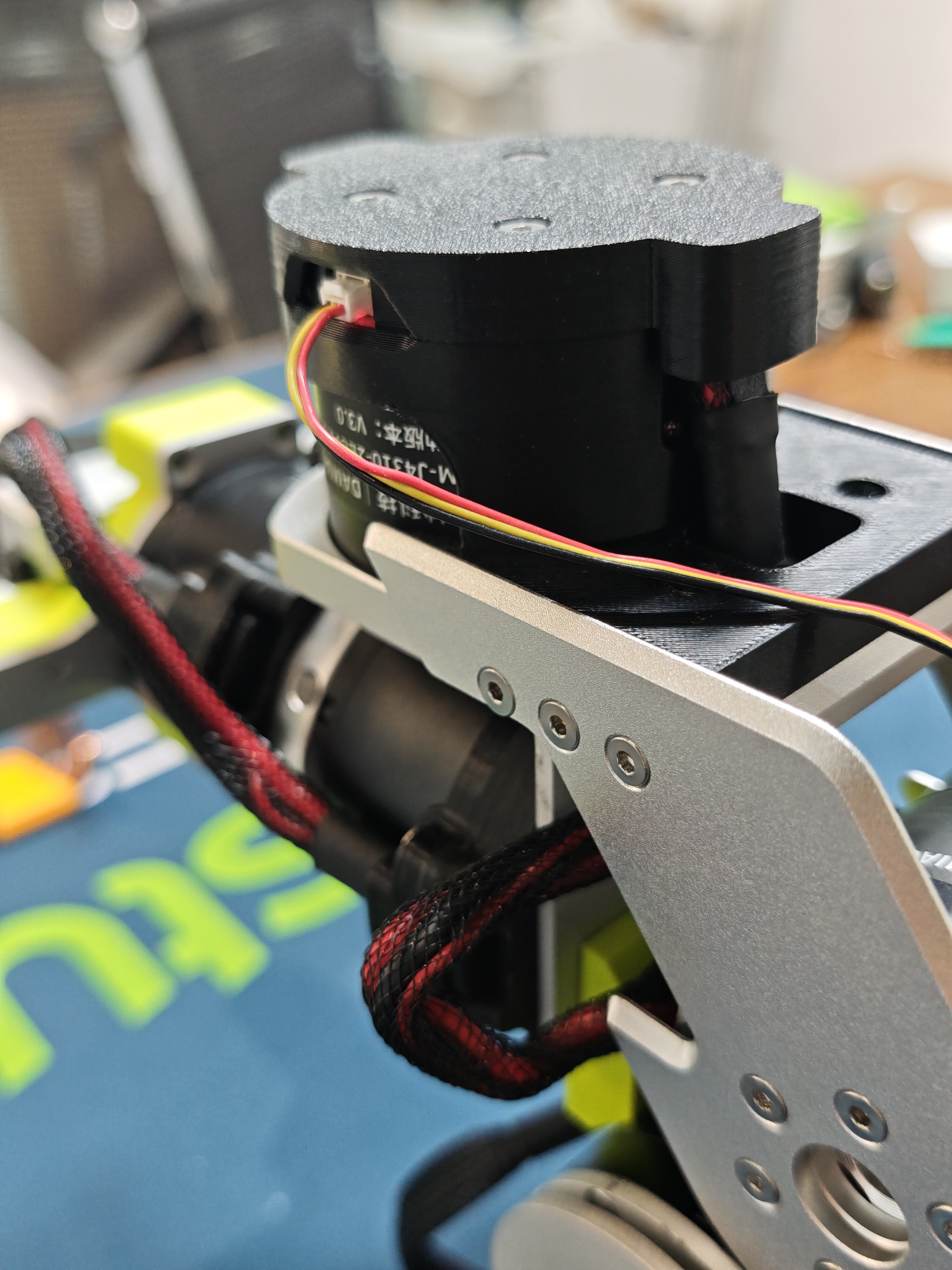
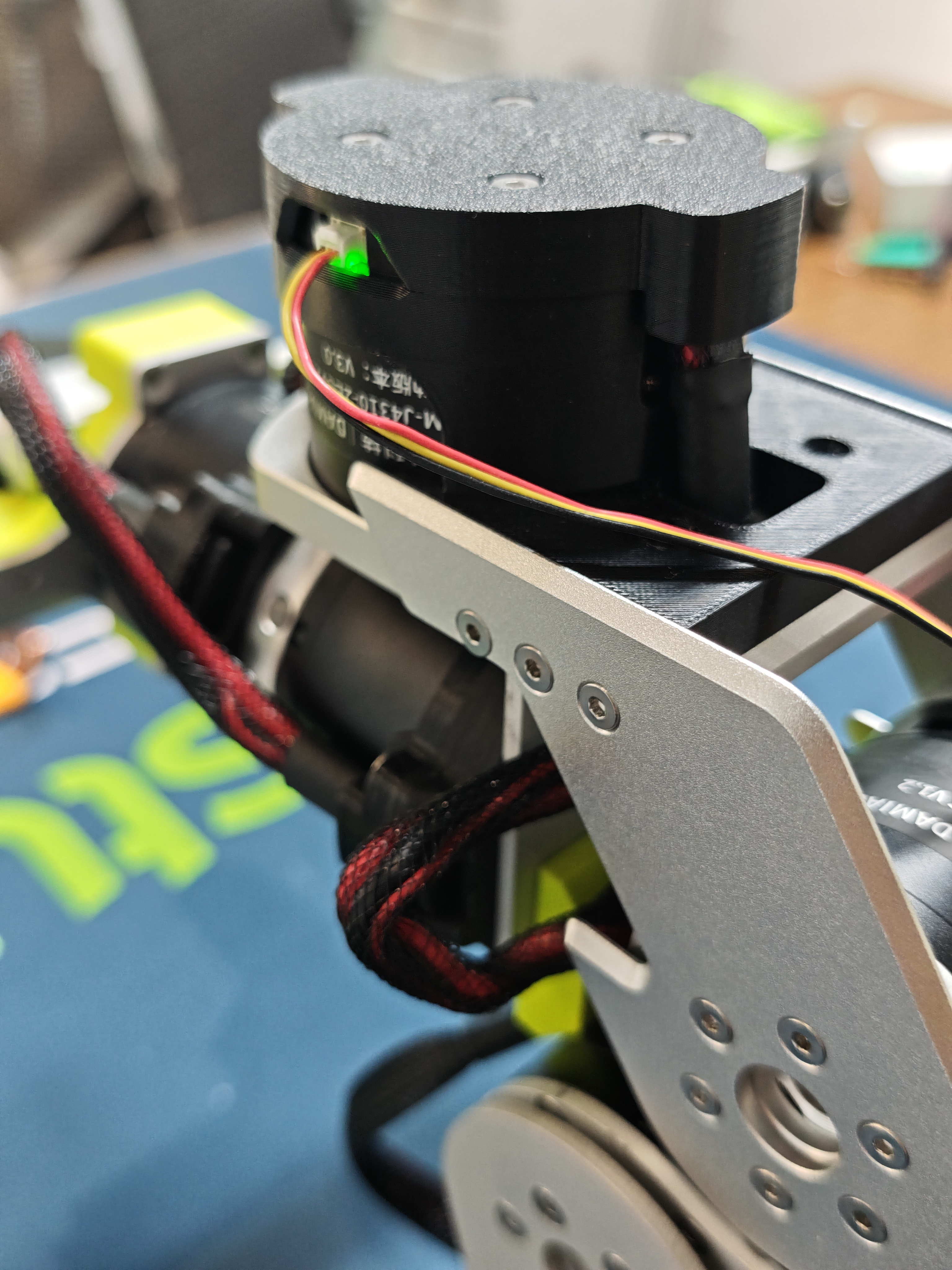
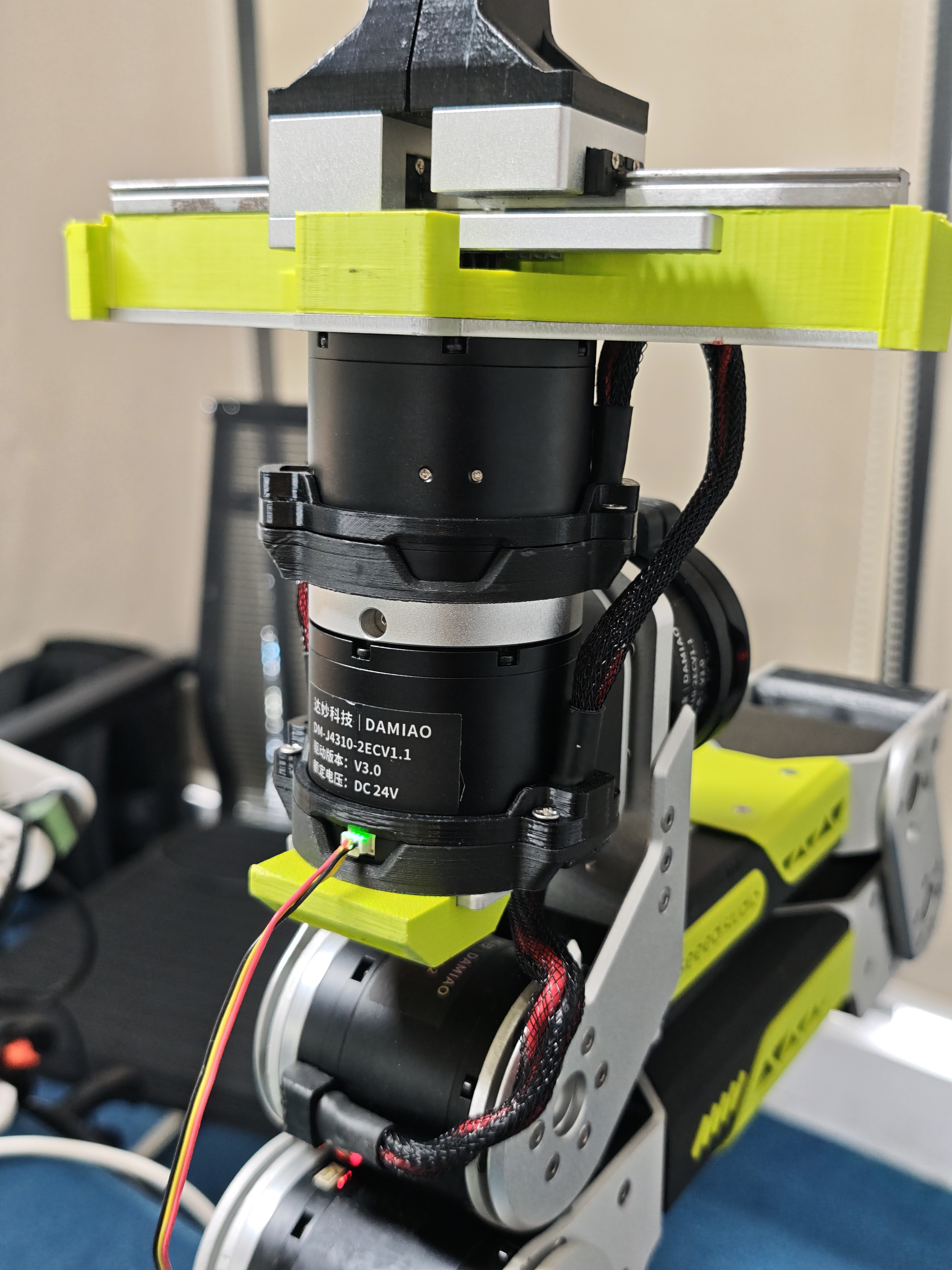
Ao montar o braço robótico, não se esqueça de conectar o chicote de cabos entre o Motor 1 e o Motor 2. A posição exata está destacada na imagem abaixo. Antes de alternar a conexão do cabo de 3 pinos, certifique-se de que o motor atual esteja desativado e a alimentação desligada para evitar hot-plug ou operação incorreta que possa causar parâmetros anormais no motor.

AI AGENT
Esta seção está em versão beta. Observe as precauções de segurança durante o uso. Se as sugestões da IA forem diferentes desta documentação, siga este guia e busque assistência de nossos engenheiros.
Deixe um AI AGENT ajudar você neste processo. Copie o prompt abaixo para o seu assistente de IA:
Please follow the workflow in AGENTS.md (https://github.com/Welt-liu/reBot-B601-RS-Skills/blob/main/en/AGENTS.md) to help me initialize the robotic arm.
Antes de Redefinir os Motores:
Antes da configuração dos parâmetros do motor, observe as seguintes preparações e regras de segurança:
- Compre 2 grampos de fixação (≥3 polegadas) e uma fonte de alimentação chaveada 24V 15A com saída XT30 (use marca confiável, sem produtos de baixa qualidade).
- Mantenha distância ≥1 m durante a depuração/operação.
- Não faça hot-plug dos motores; desligue a alimentação antes de conectar/desconectar a interface XT30 2+2.
- Não sobrecarregue/não exceda a velocidade; verifique a fiação e os fixadores antes da partida; evite ambientes úmidos/de alta temperatura/empoeirados.
- Defina parâmetros de programa razoáveis e parada de emergência para evitar perda de controle.
- Siga rigorosamente estas regras. O vendedor não é responsável por riscos/responsabilidades decorrentes de operação ilegal ou erros pessoais.
Lista de Preparação
Hardware
- Braço Robótico reBot Arm B601 DM × 1
- Placa Adaptadora USB-CAN × 1
- Placa de Separação de Sinal e Potência × 1
- Grampos de marcenaria × 2
- Cabo USB-C × 1
- Fonte de Alimentação 24V 15A (saída XT30) × 1
- Cabo de Alimentação-US \ Cabo de Alimentação-EU
Requisito de Computador
- Computador pessoal com dual boot (Windows + Ubuntu / macOS)
Software
Gravar ID do Motor e Testar Enable
Defina o CAN ID e o Master ID para cada motor de junta de acordo com os parâmetros na tabela abaixo:
| Número do Motor | CAN ID | Master ID |
|---|---|---|
| Motor 1 | 0x01 | 0x11 |
| Motor 2 | 0x02 | 0x12 |
| Motor 3 | 0x03 | 0x13 |
| Motor 4 | 0x04 | 0x14 |
| Motor 5 | 0x05 | 0x15 |
| Motor 6 | 0x06 | 0x16 |
| Motor 7 | 0x07 | 0x17 |
O seguinte é um exemplo de operação usando o Motor 1. Certifique-se de que o CAN ID e o Master ID de cada motor de junta estejam configurados corretamente de acordo com a tabela acima.
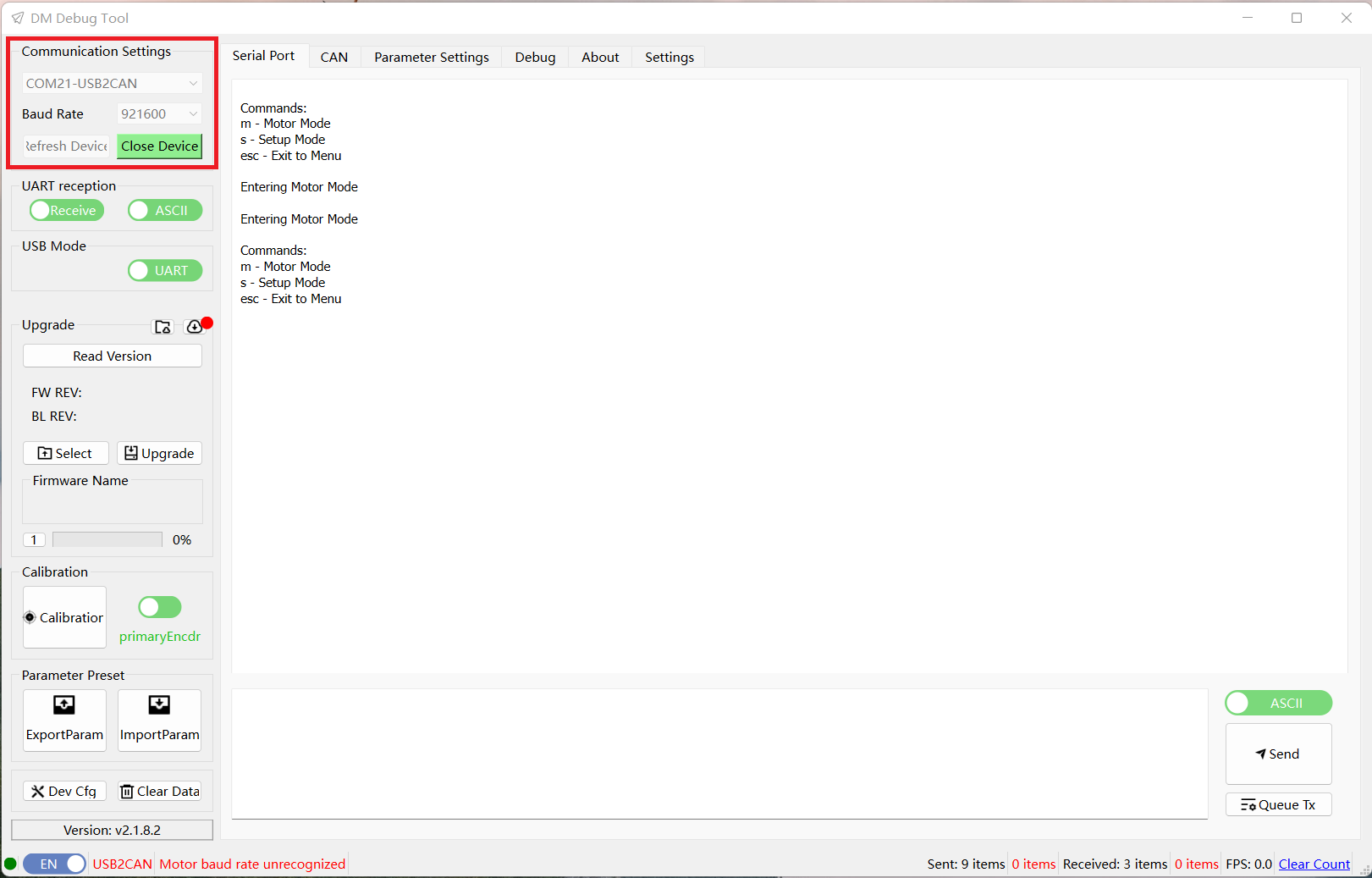
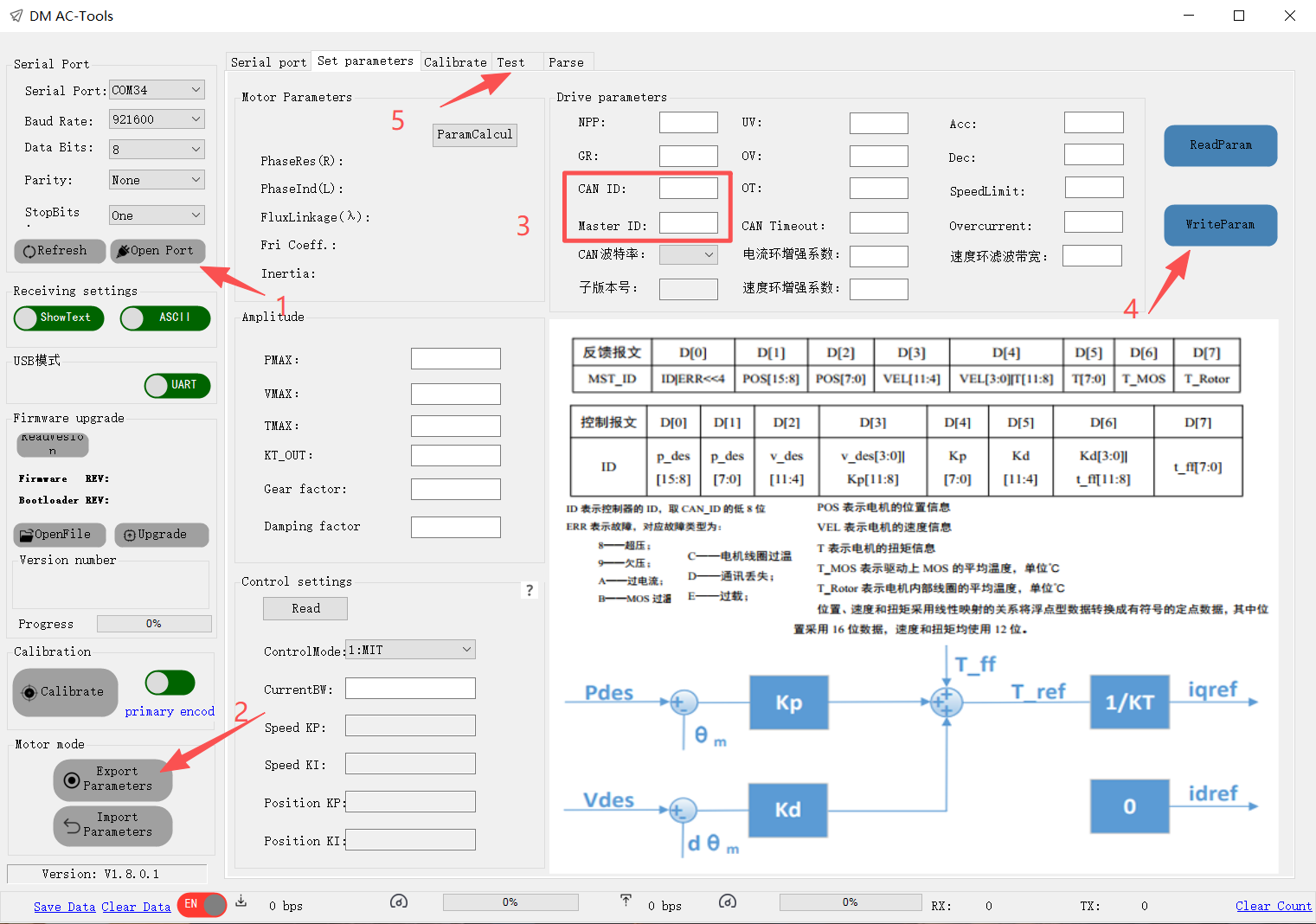
1.Abra o software host DM_Tools, selecione a porta USB COM correspondente e defina a taxa de baud para 921600. Após conectar com sucesso, as informações serão exibidas na interface Serial.
2.Use o cabo de 3 pinos para conectar o Motor 1 à placa adaptadora USB-CAN.
3.Após a conexão, acesse a interface Parameter Settings. Clique em Read Parameters para ler os parâmetros atuais e, em seguida, defina o CAN ID para 0x01 e o Master ID para 0x11.
4.Após a configuração, clique em Write Parameters para salvar os parâmetros.
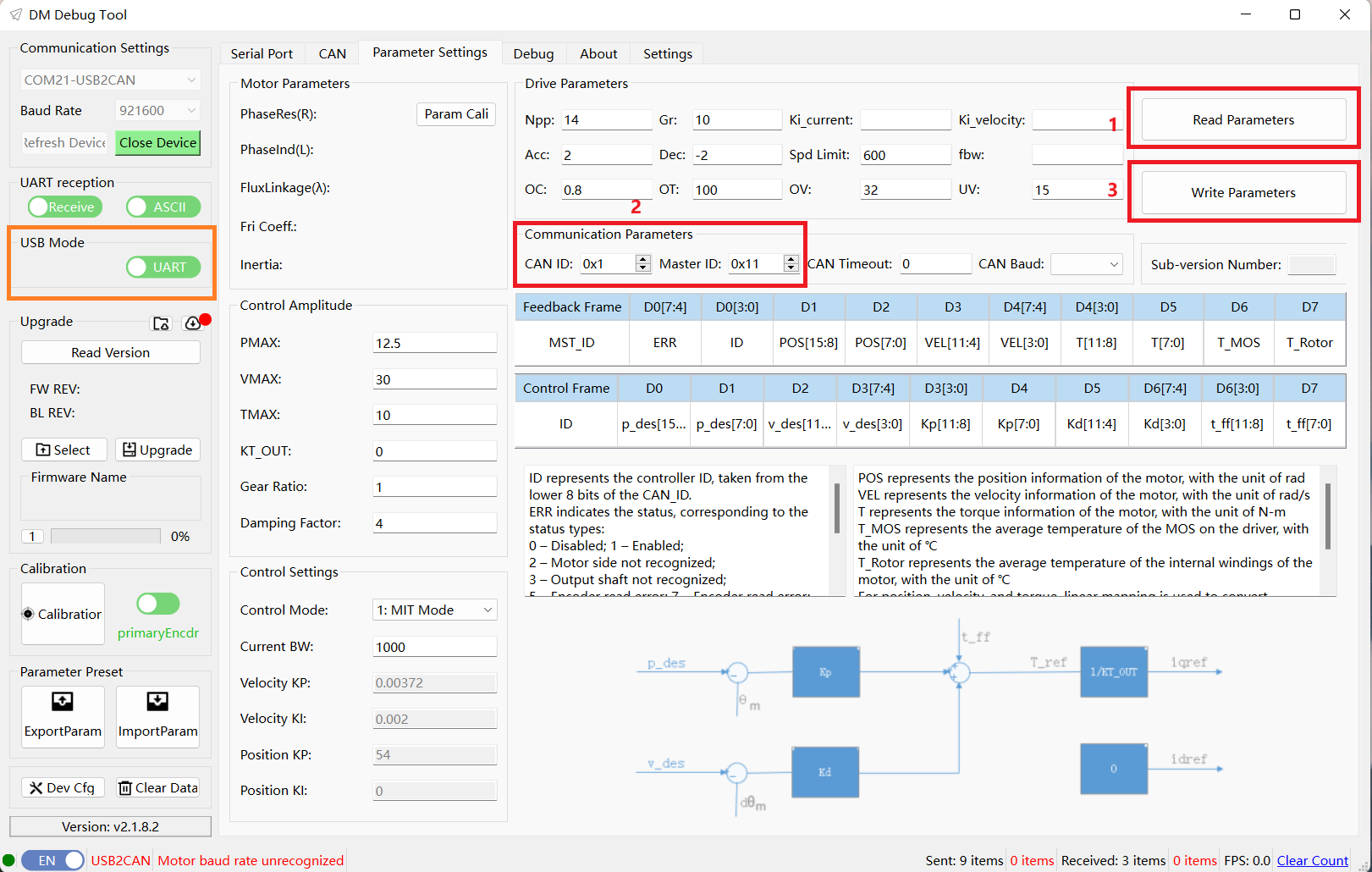
O modo USB na caixa laranja à esquerda representa o método usado ao ler e gravar parâmetros do motor na página de configurações atual.
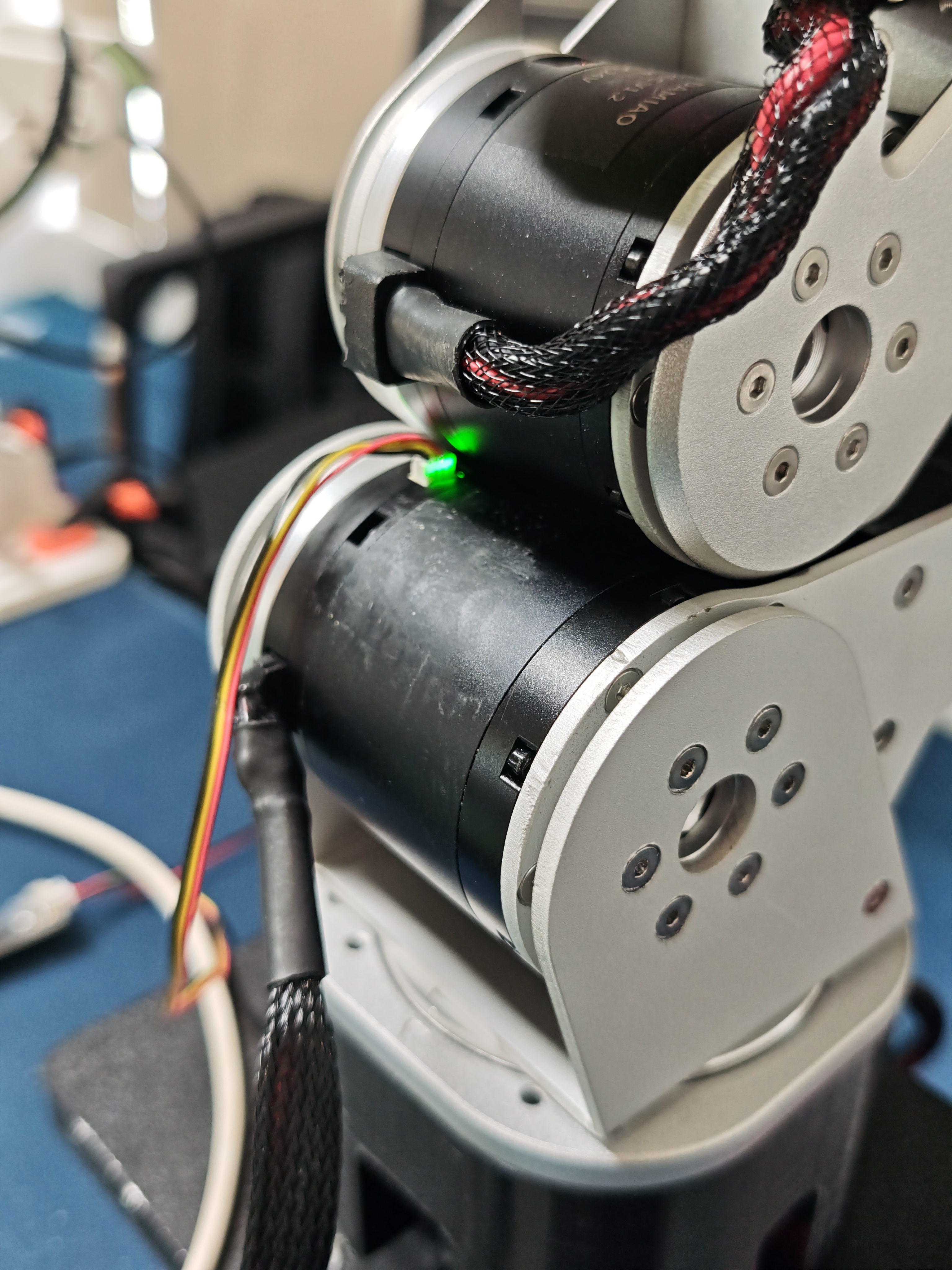
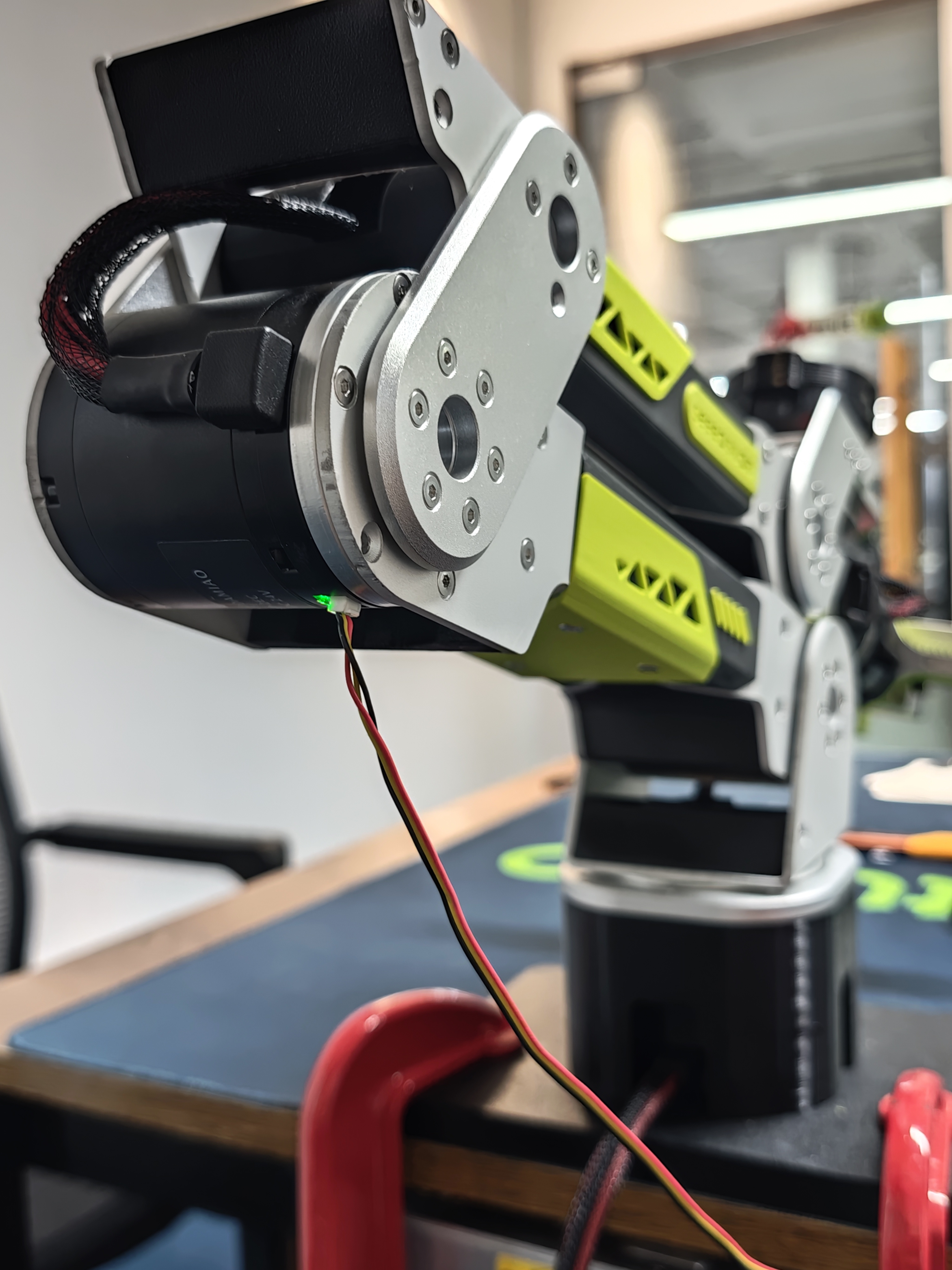
5.Navegue até a interface Debug. Depois de garantir que o CAN ID e o Master ID estejam configurados corretamente, clique em Enable. O indicador do motor ficará verde fixo, indicando que o motor está habilitado. O teste do Motor 1 está concluído.
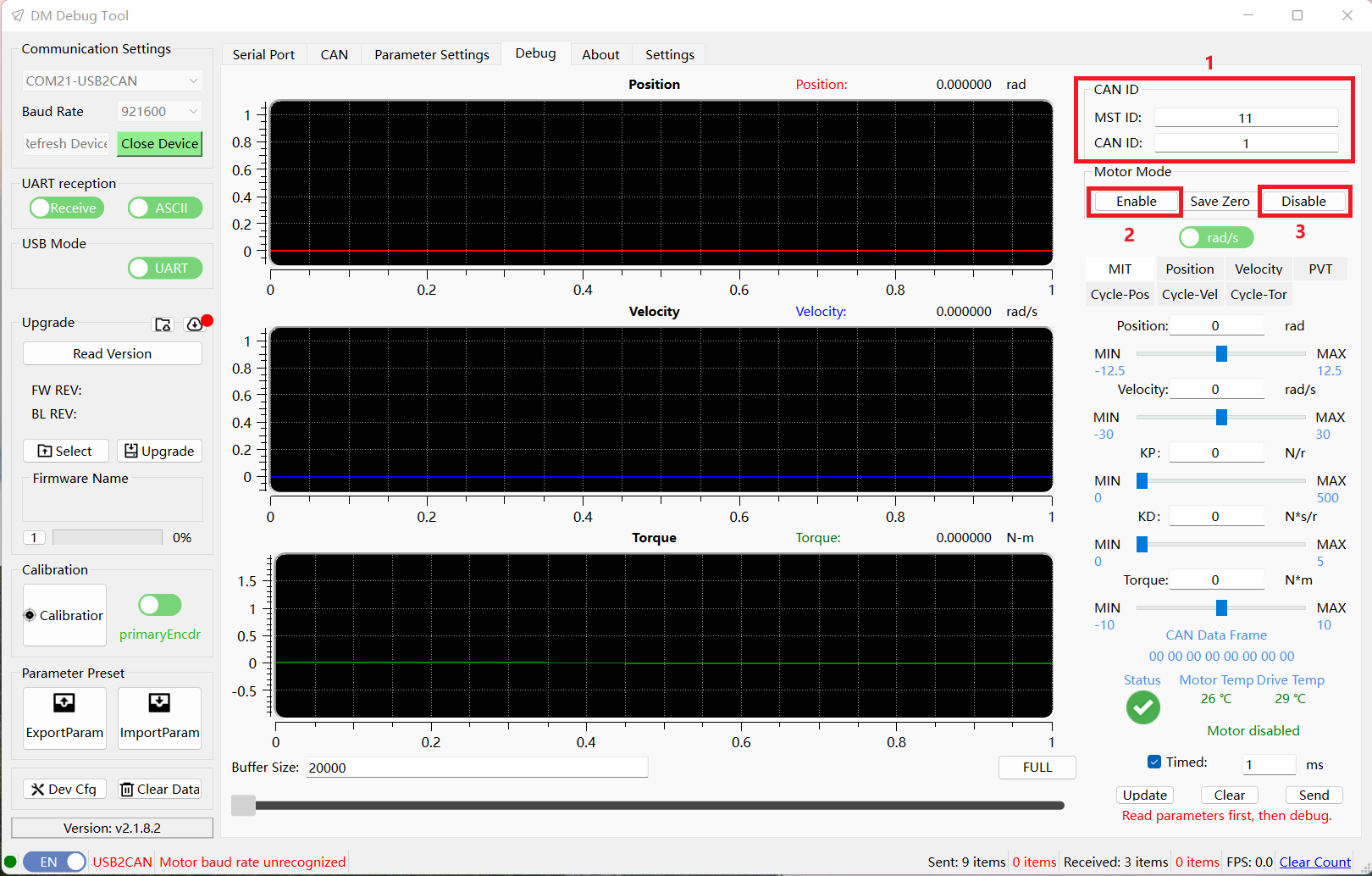
Após o teste, lembre-se de clicar em Disable para sair do estado habilitado.
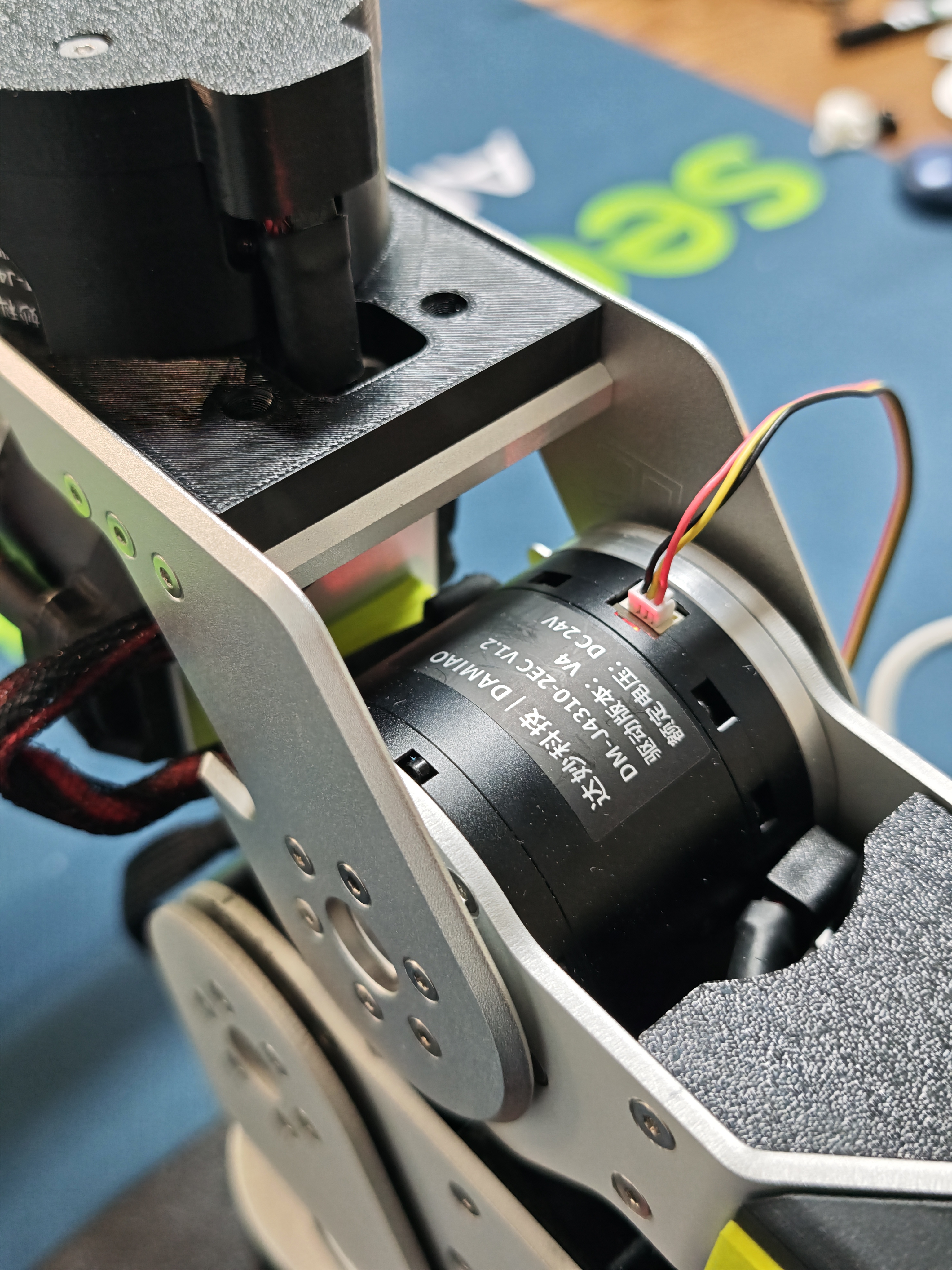
Pontos de conexão do cabo de 3 pinos e efeito de habilitação para cada motor
| Configuração do Motor 1 | Configuração do Motor 2 | Configuração do Motor 3 | Configuração do Motor 4 | Configuração do Motor 5 | Configuração do Motor 6 | Configuração do Motor 7 |
|---|---|---|---|---|---|---|
 |  |  |  |  |  |  |
| Motor 1 habilitado | Motor 2 habilitado | Motor 3 habilitado | Motor 4 habilitado | Motor 5 habilitado | Motor 6 habilitado | Motor 7 habilitado |
|---|---|---|---|---|---|---|
 |  |  |  |  |  |  |
Etapa 3: Calibrar o reBot Arm e primeiros passos
Confiamos que você concluiu a montagem do braço robótico, a inicialização do ponto zero, a configuração do ID dos motores e outras etapas de preparação seguindo o vídeo. Agora você está pronto para explorar oficialmente a série de tutoriais e ferramentas que lançamos.
Consulte o vídeo e o tutorial em texto. Antes de controlar o braço robótico, você precisa redefinir o ponto zero novamente.
-
Explore nossa plataforma MotorBridge, uma solução tudo-em-um que oferece suporte a uma lista crescente de motores, incluindo Damiao, Robstride, Hightorque, Myactuator, Hexfellow e outros. Ela também é compatível com braços robóticos continuamente atualizados, como o reBot. Projetada para iniciantes, também oferecemos um SDK em Python que implementa a mesma funcionalidade para desenvolvedores.
-
Experimente novos recursos e detalhes do MotorBridge para o braço robótico reBot, incluindo configuração de ponto zero com um clique, gravação de parâmetros, controle de motor via arrastar-e-soltar na interface gráfica e uma interface integrada de visualização de modelo.
-
Esta ferramenta é totalmente compatível com os sistemas operacionais Windows, Ubuntu e Mac.
Etapa 1: Instalar o Miniforge (no Windows\Ubuntu\macOS\Jetson\Pi)
Instale o Miniforge e crie um ambiente virtual para evitar interferência de outros pacotes de ambiente.
Ubuntu\Jetson\Pi:
wget "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-$(uname)-$(uname -m).sh"
bash Miniforge3-$(uname)-$(uname -m).sh
ou macOS:
curl -L -O "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-MacOSX-$(uname -m).sh"
bash Miniforge3-MacOSX-$(uname -m).sh
ou Windows:
Abra a página Miniforge Release no seu navegador, encontre o Miniforge3-Windows-x86_64.exe mais recente e faça o download:
https://github.com/conda-forge/miniforge/releases
Etapa 2: Configuração do ambiente
Crie um ambiente virtual com Python 3.12:
conda create -y -n rebot python=3.12
Em seguida, ative seu ambiente virtual; você deve fazer isso sempre que abrir um shell para usar o rebot:
conda activate rebot
Etapa 3: Instalar o motorbridge
Observação para usuários de macOS:
Se você tiver taxas de quadros baixas durante a teleoperação no macOS, isso pode ser causado por um driver WCH CH34x desatualizado. Para macOS 10.14 e posteriores, o sistema inclui um driver AppleUSBCHC0M integrado. Você pode desinstalar o driver antigo e mudar para o driver integrado do macOS, o que deve melhorar efetivamente as taxas de quadros.
Após ativar o ambiente virtual do reBot, execute o seguinte comando para instalar o motorbridge:
pip install motorbridge
Etapa 4: Conectar o rebot
Depois de conectar o braço robótico ao seu computador por meio de um cabo USB e ligar sua fonte de alimentação, você precisa configurar permissões de acesso 666 para a porta serial. (Sistemas Windows não exigem configuração de permissões; você pode pular esta etapa.)
sudo chmod 666 /dev/ttyACM*
Etapa 5: Abrir o motorbridge
Abra https://motorbridge.github.io/motorbridge-studio/ no seu navegador, depois clique em help, copie o comando adequado para o seu sistema e placa controladora, verifique o IP e a porta e então pressione Enter no terminal.
Por exemplo, no Windows:
motorbridge-gateway -- --bind 127.0.0.1:9002 --vendor damiao --transport dm-serial --serial-port COM3 --serial-baud 921600 --model 4340P --motor-id 0x01 --feedback-id 0x11 --dt-ms 20

FAQ
1. Ruído anormal alto ocorre imediatamente após a inicialização do motor
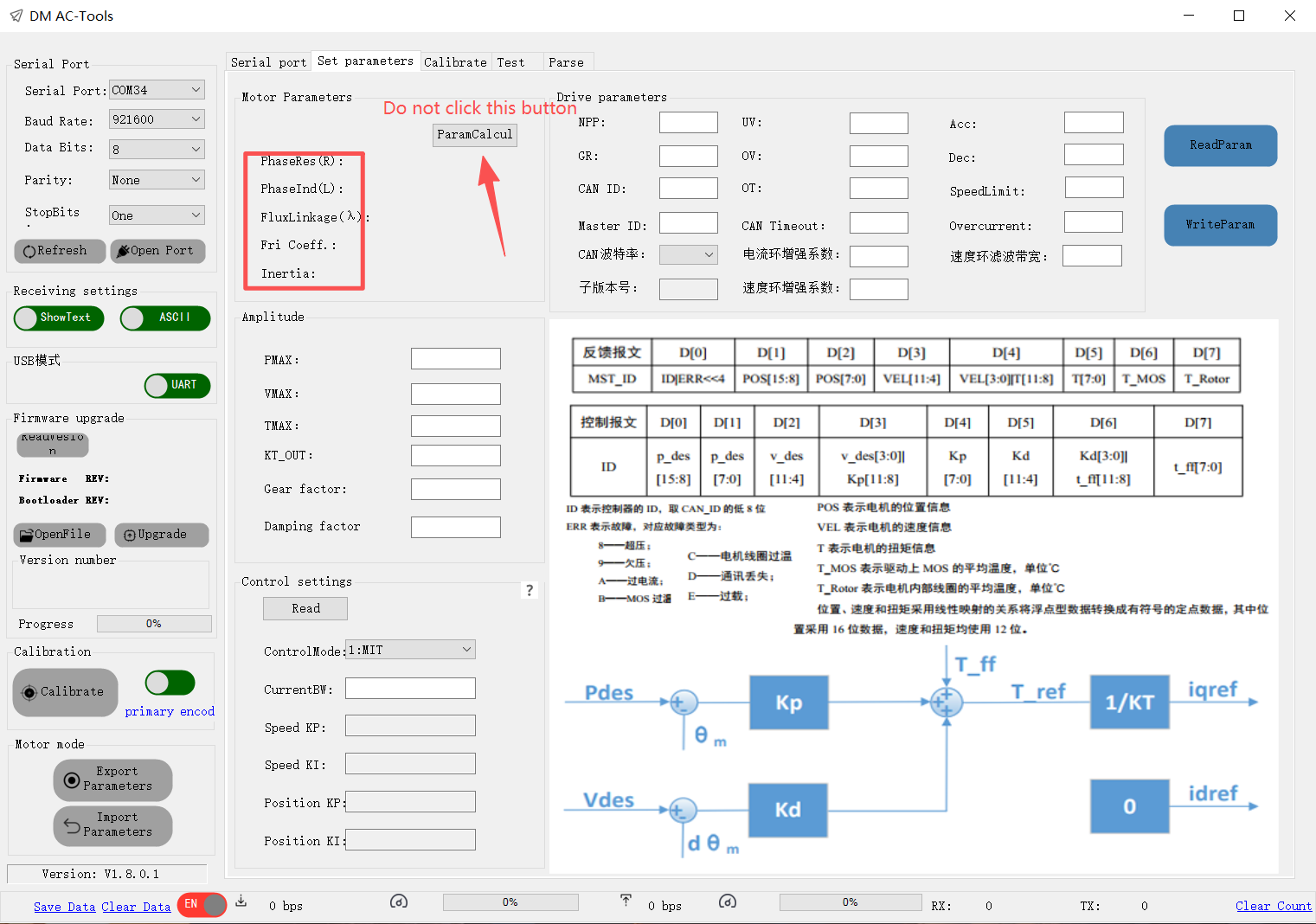
- Esse problema geralmente ocorre quando a calibração de parâmetros é acionada acidentalmente durante a configuração do ID, o que sobrescreve parâmetros predefinidos de fábrica, como a inércia do motor. Use DM_Tools_v.1.8.0.1.exe (apenas para Windows) disponível em: https://files.seeedstudio.com/wiki/robotics/projects/rebot_arm/DM_Tools_v1.8.0.1.exe Exporte os parâmetros completos de um motor intacto do mesmo modelo por meio do software host, importe esses parâmetros para a unidade com falha, atualize o respectivo CAN ID, salve os parâmetros gravados e, em seguida, prossiga com a calibração do ponto zero.
Parâmetros padrão do DM4310 Parâmetros padrão do DM4340P
2. Todos os motores compartilham IDs CAN idênticos
- Ao realizar a calibração do ponto zero por meio do DM_Tools_v.1.8.0.1.exe (apenas para Windows), evite clicar nos botões Read ou Set ao lado do campo CAN ID. A interface de depuração se comunica pelo barramento CAN; clicar em Set unificará o CAN ID de todos os motores conectados ao CANBUS.