Introdução ao reBot Arm B601-RS

![]()
![]()
![]()
![]()
Braço Robótico 6-DOF · Suporte a Múltiplos Motores · Solucionador de Cinemática · Planejamento de Trajetória · Totalmente Open Source
O projeto reBot Arm foi disponibilizado como open source no GitHub. Este guia irá conduzi-lo pelo início rápido do B601-RS, da montagem à operação. O conteúdo deste guia está chegando até você à velocidade da luz — fique ligado.
Aviso de Segurança e Notificação de Risco
Sobre a Fonte de Alimentação
- O braço robótico não é enviado com uma fonte de alimentação / não inclui uma fonte de alimentação por padrão. Você pode conectar uma bateria por conta própria ou adquirir nossa Fonte de Alimentação MeanWell 48V 12.5A open source ou pela Amazon. Por favor, não compre fontes de alimentação de fabricantes sem marca ou por canais inseguros. Quaisquer riscos ou consequências decorrentes disso serão de responsabilidade do indivíduo.
Se a tensão da sua residência for 220V, ajuste a chave seletora de tensão na lateral da fonte de alimentação para 230V. Se a tensão da sua residência for 110V, altere para 115V.
| 220V | 110V |
|---|---|
 |  |

-
Como alternativa, você pode escolher nosso gabinete open source para fonte de alimentação MeanWell 24V 14.6A para auto-montagem. As instruções em texto e a BOM estão em open source no repositório GitHub (recomendado apenas para desenvolvedores com experiência relevante em montagem de fontes de alimentação).
Vídeo de referência para montagem:
Etapa 1: Guia de Montagem
- Antes da montagem, leia atentamente as instruções a seguir. Para garantir um processo de montagem tranquilo e uma experiência prática completa, seja paciente, mantenha o foco e siga sempre estes pontos-chave:
- Este kit inclui numerosos parafusos e peças estruturais, alguns dos quais são semelhantes. Verifique cuidadosamente as especificações dos parafusos e os modelos das peças e confirme a orientação de instalação antes de apertar.
- O vídeo foi gravado no início de abril. Pode haver pequenos ajustes nas peças posteriormente, mas isso não afeta a qualidade da montagem ao seguir o vídeo. As peças finais são as que acompanham o envio.
- Para facilitar a instalação e remoção dos parafusos, a BOM open source especifica parafusos padrão. No entanto, os parafusos enviados com o kit têm trava-rosca aplicada. Você também pode usar suas próprias ferramentas preferidas ou uma chave de fenda elétrica (altamente recomendado ter uma à mão). Se usar uma ferramenta elétrica, certifique-se de ajustar o torque para um nível baixo a médio (3–6 kgf·cm) para evitar torque excessivo que possa espanar os parafusos, causando danos irreversíveis em que as peças não podem ser removidas. Se houver qualquer sinal de espanamento, substitua imediatamente o parafuso ou realinhe e tente novamente. Parafusos com trava-rosca espanados não podem ser removidos com extrator de parafusos e irão inutilizar toda a peça. Portanto, proceda com cautela.
- Priorize a segurança durante a montagem para evitar dedos presos ou lesões por esmagamento. Crianças devem concluir este projeto acompanhadas por um dos pais ou responsável.
Etapa 2: Calibrar o Braço Robótico e Começar
-
Explore nossa plataforma MotorBridge. Esta plataforma é uma solução abrangente tudo-em-um que oferece expansão contínua dos tipos de motores, cobrindo motores Damiao, motores Robstride, motores Hightorque, motores Myactuator, Hexfellow e mais. Ela também é compatível com produtos de braço robótico continuamente atualizados como o reBot. A plataforma é fácil de usar para iniciantes e também fornece um SDK em Python com funcionalidade totalmente consistente para desenvolvedores.
-
Experimente os novos recursos e detalhes do MotorBridge especificamente adaptados para o braço robótico reBot, incluindo calibração de ponto zero com um clique, gravação de parâmetros, controle de motor por arrastar e soltar via UI e uma interface integrada de visualização de modelo.
-
Esta ferramenta é totalmente compatível com os sistemas operacionais Windows, Ubuntu e macOS.
-
Foi verificado que o desempenho de máquinas virtuais é insuficiente para executar os demos e há problemas de configuração. Recomenda-se usar uma máquina física com Ubuntu para controlar o braço robótico.
-
(Versão Beta) Deixe um agente ajudar você a inicializar o braço robótico. Copie o conteúdo a seguir e envie para o agente:
Please follow the process in AGENTS.md (https://github.com/Welt-liu/reBot-B601-Agent-Guide/blob/main/en/AGENTS.md) to help the user complete the initialization of a new robotic arm.
Observação: Se você comprou um kit pré-montado, informe o agente durante a etapa de gravação do ID do motor: "I purchased a pre-assembled kit, please scan motors 1–7 to verify they are all online, do not rewrite the motor IDs."
- O agente usa comandos de CLI para concluir a gravação do ID do motor, enquanto o wiki usa um método de interação via interface web. Ambas as abordagens funcionam.
Você deve ter concluído a preparação preliminar para a montagem do braço robótico seguindo o vídeo. Em seguida, apresentaremos as etapas para gravar os IDs dos motores e calibrar o braço robótico.
Consulte o vídeo e o tutorial em texto. Antes de controlar o braço robótico, você precisa redefinir o ponto zero novamente.
1. Instalar o Miniforge (Recomendado) (Suporta Windows\Ubuntu\macOS\Jetson\Raspberry Pi)
- Instale o Miniforge e crie um ambiente virtual para evitar conflitos com outros pacotes de ambiente que possam causar falhas nos demos.
Ubuntu\Jetson\Raspberry Pi:
wget "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-$(uname)-$(uname -m).sh"
bash Miniforge3-$(uname)-$(uname -m).sh
ou macOS:
curl -L -O "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-MacOSX-$(uname -m).sh"
bash Miniforge3-MacOSX-$(uname -m).sh
ou Windows:
Abra a página de Release do Miniforge no seu navegador, encontre a versão mais recente de Miniforge3-Windows-x86_64.exe e clique para baixar:
https://github.com/conda-forge/miniforge/releases
- Crie um ambiente virtual Python 3.12:
Usuários de Git Bash: Se o comando conda não for encontrado, significa que o Git Bash não carregou o ambiente conda. Você precisa inicializá-lo primeiro:
# Temporary (current terminal only), replace <install_path> with the actual path
source <install_path>/etc/profile.d/conda.sh
# Permanent (write to bashrc, run once)
echo 'source <install_path>/etc/profile.d/conda.sh' >> ~/.bashrc
source ~/.bashrc
Para que o PowerShell ative automaticamente o ambiente conda:
conda init powershell
conda create -y -n rebot python=3.12
- Ative o ambiente virtual. Você precisa executar novamente este comando de ativação sempre que abrir um terminal para usar recursos relacionados ao reBot:
conda activate rebot
2. Instalar o Motorbridge
Após ativar o ambiente virtual do reBot, execute o seguinte comando para instalar o motorbridge:
Se você tiver taxas de quadros baixas durante a teleoperação no macOS, isso pode ser causado por uma versão desatualizada do driver WCH CH34x. Para macOS 10.14 e posteriores, o sistema inclui um driver interno AppleUSBCHC0M. Você pode desinstalar o driver antigo e alternar para o driver interno do macOS, o que deve melhorar efetivamente as taxas de quadros.
pip install motorbridge
3. PCAN-USB
Faça o dispositivo PCAN-USB funcionar no barramento CAN a 1 Mbps para comunicação com o braço robótico.
Ubuntu\Jetson\Raspberry Pi:
# The kit includes PCAN-USB, which should normally show up as can0 or can1
sudo modprobe peak_usb
ip -br link
# If can0 appears, set the bitrate
sudo ip link set can0 down 2>/dev/null
sudo ip link set can0 type can bitrate 1000000 restart-ms 100
sudo ip link set can0 up
ou macOS:
Se libPCBUSB.dylib não puder ser carregado, instale primeiro o PCBUSB:
curl -L -o macOS_Library_for_PCANUSB_v0.13.tar.gz \
https://raw.githubusercontent.com/tianrking/motorbridge/main/third_party/pcan/macos/macOS_Library_for_PCANUSB_v0.13.tar.gz
tar -xzf macOS_Library_for_PCANUSB_v0.13.tar.gz
cd PCBUSB
sudo ./install.sh
Configure DYLD_LIBRARY_PATH para garantir que o motorbridge-gateway consiga encontrar a biblioteca PCBUSB em tempo de execução. Crie um script de ativação no ambiente conda para que ele tenha efeito automaticamente sempre que você executar conda activate rebot:
mkdir -p "$CONDA_PREFIX/etc/conda/activate.d"
cat > "$CONDA_PREFIX/etc/conda/activate.d/env_vars.sh" << 'EOF'
export DYLD_LIBRARY_PATH="/usr/local/lib${DYLD_LIBRARY_PATH:+:$DYLD_LIBRARY_PATH}"
EOF
echo $DYLD_LIBRARY_PATH
Verifique se está pronto:
# Check Python package and CLI are ready
python3 -c "import motorbridge; print('motorbridge OK')"
motorbridge-cli --help
# Optional: Check if PCBUSB runtime is loadable
python3 -c "import ctypes; ctypes.CDLL('libPCBUSB.dylib'); print('PCBUSB load OK')"
ou Windows:
Acesse pcan-usb para instalar o driver PCAN-USB.
Se o PCAN-USB não for detectado no Gerenciador de Dispositivos após instalar o driver, expanda a seção abaixo, baixe o firmware PCAN e siga as etapas de recuperação.
Download do firmware PCAN e etapas de recuperação do driver
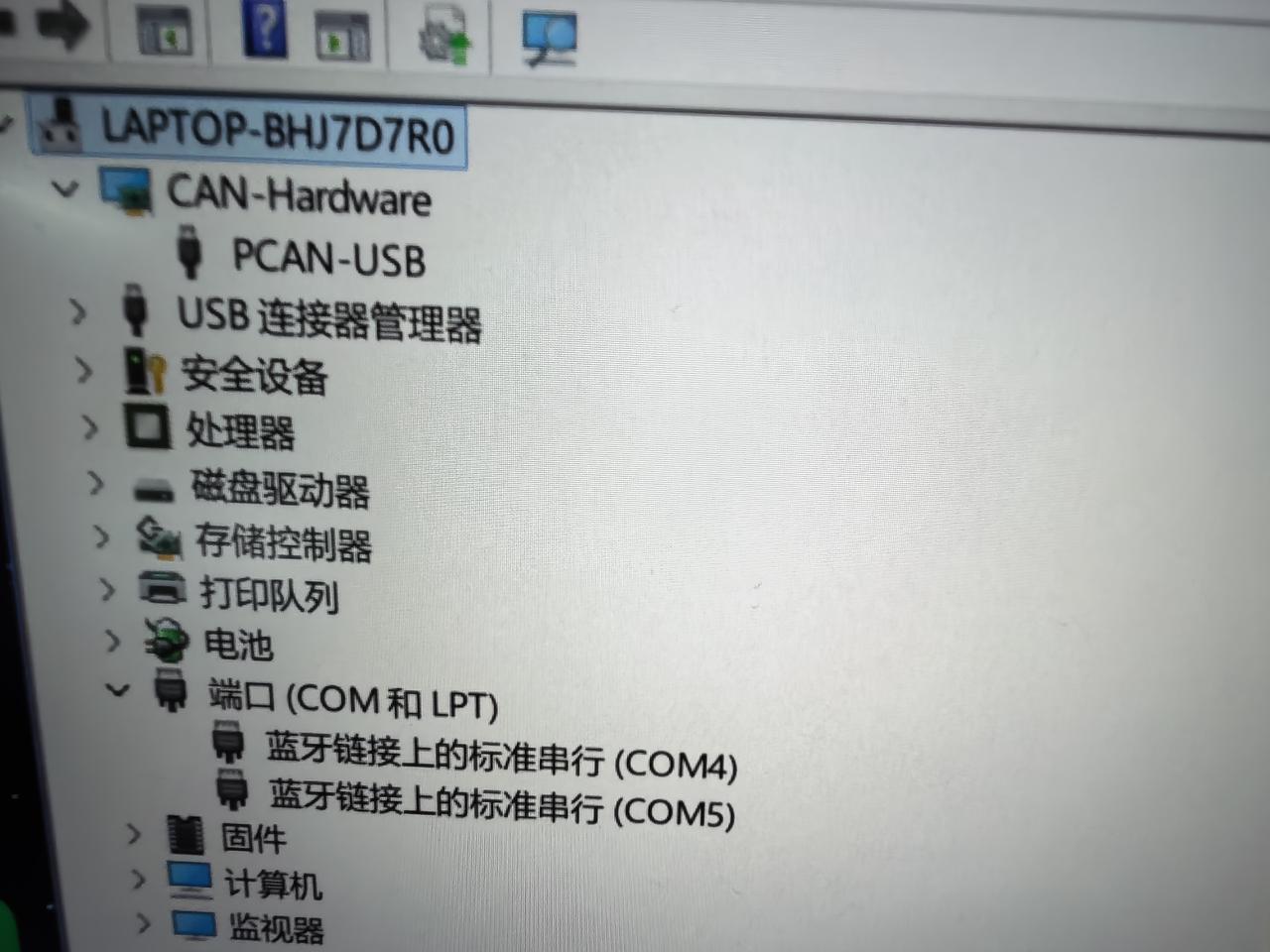
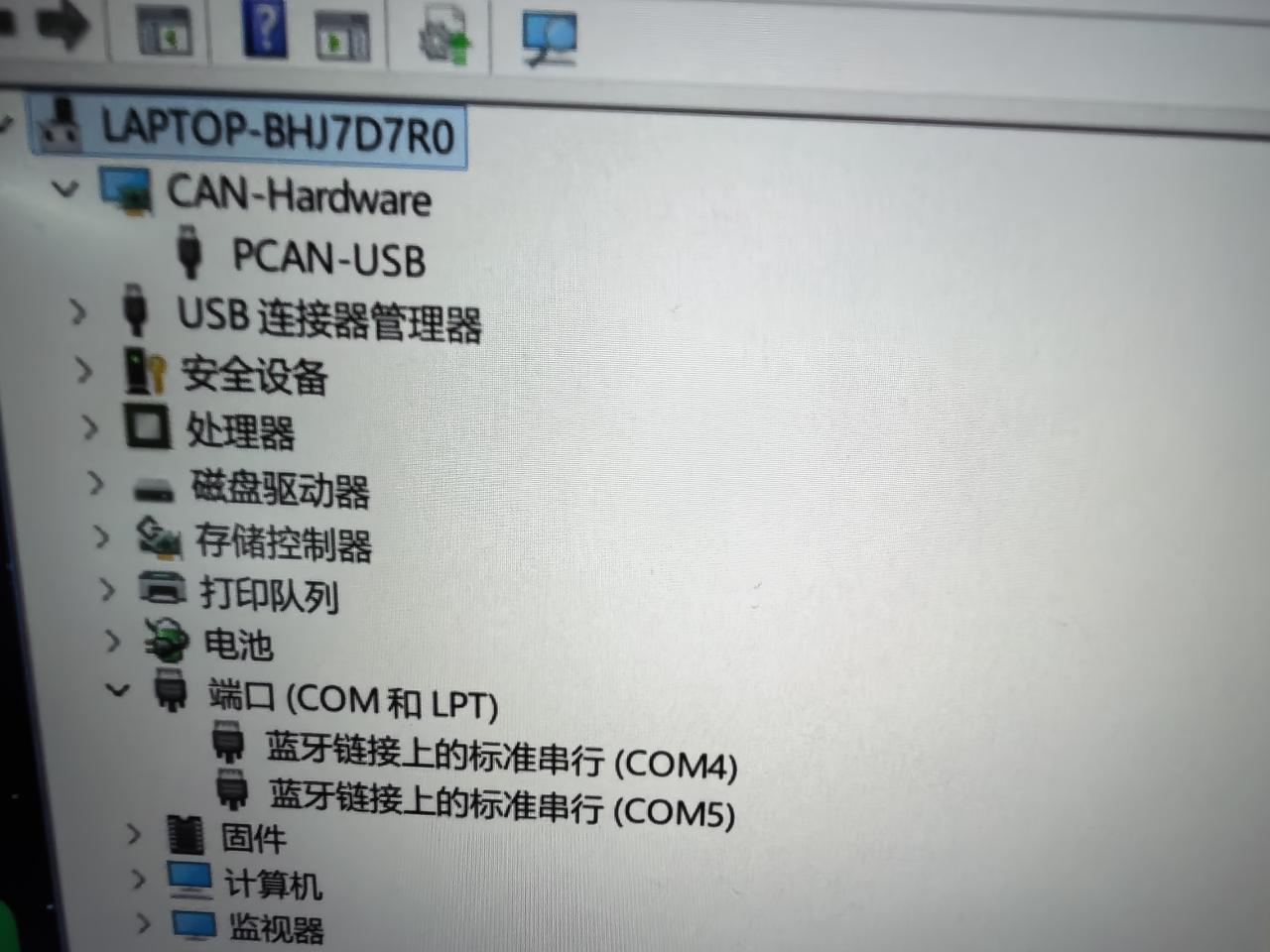
Se o PCAN-USB ainda não funcionar após instalar o driver e o Gerenciador de Dispositivos não mostrar o dispositivo PCAN-USB ilustrado abaixo, baixe o pacote de firmware PCAN e siga estas etapas para instalar o driver DFU e regravar o firmware.
Instalar o driver DFU
- Extraia o pacote baixado. Ele contém as pastas
Dfu toolepcan.
- Abra a pasta
Dfu toole execute o instalador.exe. Após a instalação, anote o caminho de instalação do driver, por exemplo:
C:\Program Files (x86)\STMicroelectronics\Software\DfuSe v3.0.6\Bin\Driver

- Ajuste a chave DIP no módulo USB2CAN para BOOT e, em seguida, conecte o módulo ao computador.

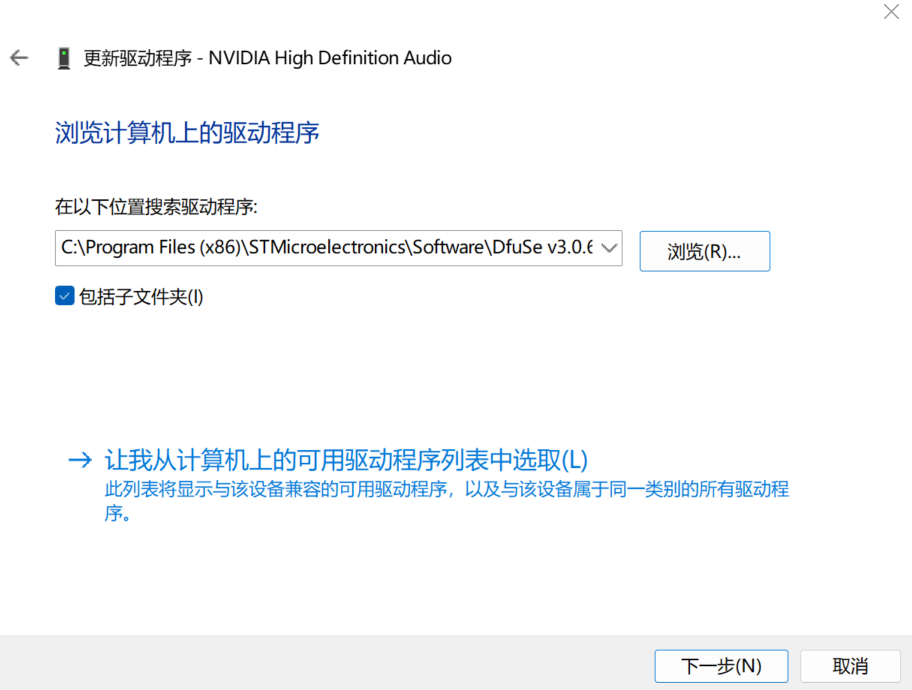
- Abra o Gerenciador de Dispositivos, localize Outros dispositivos → STM32 BOOTLOADER, clique com o botão direito, selecione Atualizar driver e, em seguida, selecione Procurar software de driver no computador.


- Cole o caminho do driver DfuSeDemo anotado anteriormente no campo de localização, selecione Incluir subpastas e clique em Avançar.
-
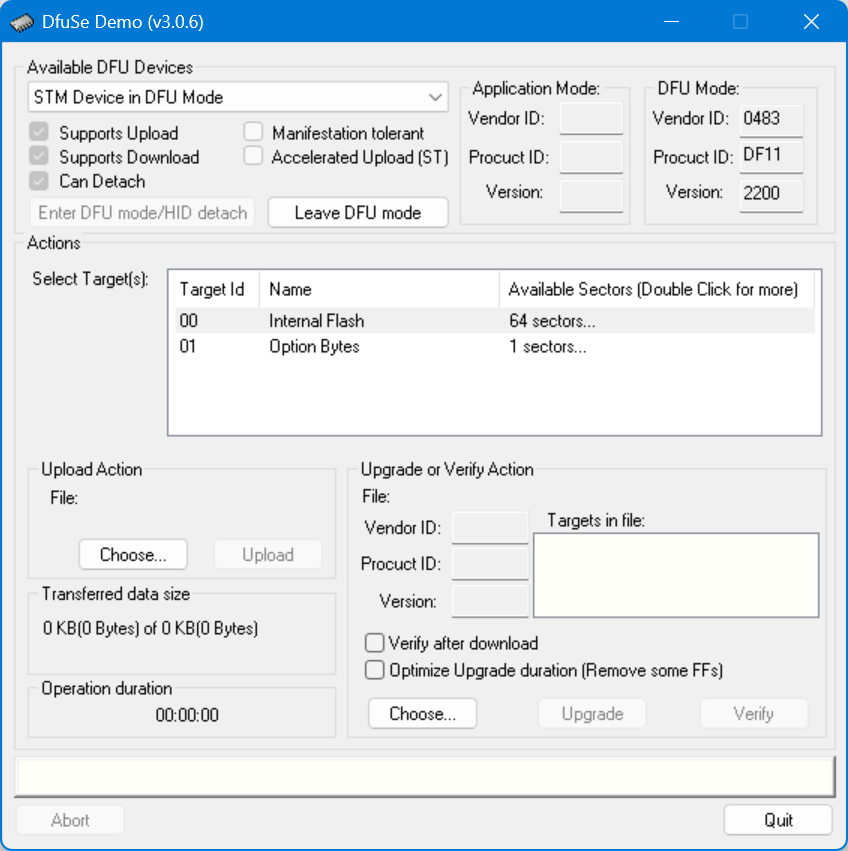
Desconecte e reconecte o módulo USB2CAN. Se ele agora for identificado como STM Device in DFU Mode, a atualização do driver foi bem-sucedida.
-
Abra o DfuSeDemo e confirme se ele detecta corretamente o módulo USB2CAN.
Gravar o firmware PCAN
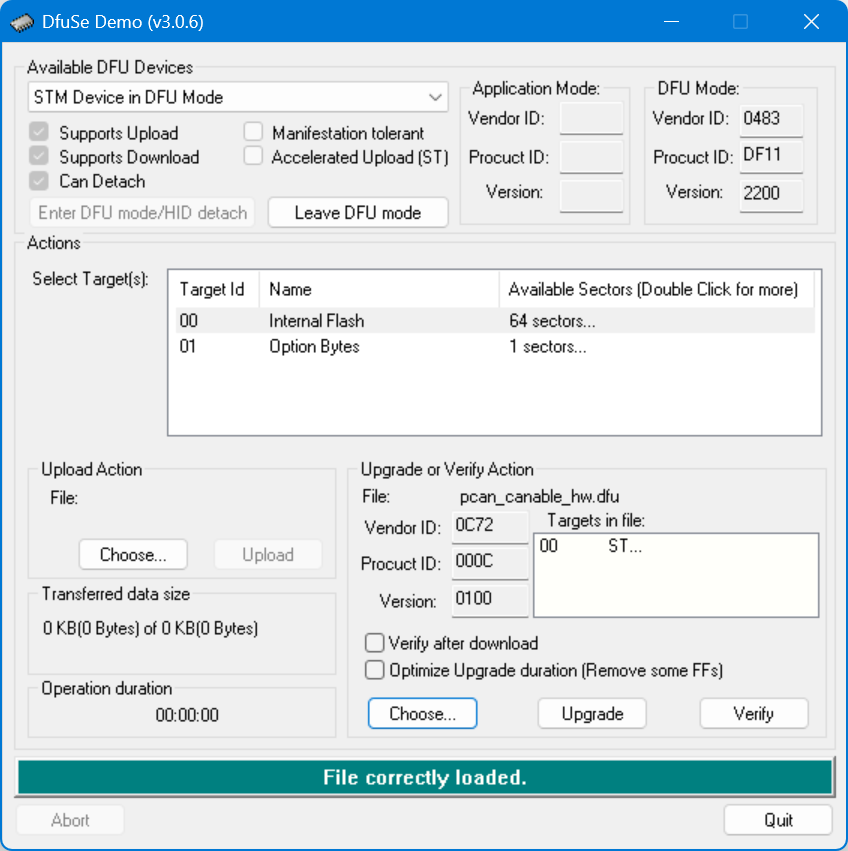
- No DfuSeDemo, clique em Upgrade or Verify Action → Choose... e selecione o firmware da pasta
pcanextraída. - Clique em Upgrade, clique em Yes na caixa de diálogo de confirmação e aguarde a conclusão do processo de gravação do firmware. Em seguida, você pode fechar o DfuSeDemo.

Restaurar e verificar o dispositivo
Desconecte o módulo USB2CAN, ajuste a chave DIP para 120R e reconecte-o ao computador. Abra o Gerenciador de Dispositivos. Se o dispositivo for identificado como PCAN-USB, o problema foi resolvido e você pode continuar com este guia.
Download de firmware PCAN e etapas de reparo de driver - Ubuntu
Usuários Ubuntu, consulte este guia
1.> 📦 Clique para baixar USB2CAN.zip
-
Mude o USB2CAN para BOOT
-
Extraia o USB2CAN.zip da etapa 1 e coloque
flash_pcan_ubuntu.shepcan_canable_hw.bin(de dentro do USB2CAN.zip) no mesmo diretório
Clique para baixar flash_pcan_ubuntu.sh
Se estiver transferindo de outro computador (por exemplo, scp):
scp flash_pcan_ubuntu.sh pcan_canable_hw.bin seeed@your_Ubuntu_IP:~/Downloads/
Ou simplesmente copie para um pen drive USB e conecte-o ao computador Ubuntu — desde que os arquivos terminem em ~/Downloads, no diretório atual ou em /tmp, o script os encontrará automaticamente.
- Execute:
bash flash_pcan_ubuntu.sh
Digite sua senha; aguarde a conclusão
Após a conclusão, mude de volta para "120R"
Reconecte o USB.
Download de firmware PCAN e etapas de reparo de driver - MAC
Usuários MAC, consulte este guia
1.> 📦 Clique para baixar USB2CAN.zip
-
Mude o USB2CAN para BOOT
-
Extraia o USB2CAN.zip da etapa 1 e coloque
flash_pcan_mac.shepcan_canable_hw.bin(de dentro do USB2CAN.zip) no mesmo diretório
Clique para baixar flash_pcan_mac.sh
Se estiver transferindo de outro computador (por exemplo, scp):
scp flash_pcan_mac.sh pcan_canable_hw.bin seeed@your_MAC_IP:~/Downloads/
Ou simplesmente copie para um pen drive USB e conecte-o ao MAC — desde que os arquivos terminem em ~/Downloads, no diretório atual ou em /tmp, o script os encontrará automaticamente.
- Execute:
bash /Users/"your_username"/Downloads/flash_pcan_mac.sh "/Users/"your_username"/Downloads/pcan_canable_hw.bin"
O comando acima pressupõe que os arquivos estejam colocados no caminho Downloads do Mac; ajuste de acordo com o seu caminho real
Digite sua senha; aguarde a conclusão
Após a conclusão, mude de volta para "120R"
Reconecte o USB.
4. Iniciar o MotorBridge-gateway para escrever pontos zero e depurar
Antes de redefinir o motor
Antes da configuração dos parâmetros do motor, observe as seguintes preparações e regras de segurança:
- Prepare 2 grampos de fixação (tamanho ≥3 polegadas) e uma fonte de alimentação chaveada de 48 V com saída XT30 (escolha uma marca confiável; não use fontes de alimentação de baixa qualidade).
- Durante a depuração e operação, mantenha uma distância segura de pelo menos 1 metro.
- Não conecte ou desconecte motores com o sistema energizado; desligue a fonte de alimentação antes de conectar/desconectar o conector XT30 2+2.
- Não sobrecarregue nem opere os motores em velocidade excessiva; verifique a fiação e os fixadores antes da partida; não use em ambientes úmidos, de alta temperatura ou empoeirados.
- Defina parâmetros de programa razoáveis e função de parada de emergência para evitar perda de controle do equipamento.
- Siga rigorosamente as regras acima. O vendedor não se responsabiliza por quaisquer riscos e perdas causados por operações em desacordo com as instruções ou por erro humano.
Escrita e depuração do ponto zero pela interface Web
Abra o endereço motorbridge-studio no seu navegador, clique na opção Help, copie o comando correspondente com base no seu sistema operacional e na sua placa de driver, verifique o endereço IP e o número da porta e, em seguida, pressione Enter no terminal para executá-lo.
motorbridge-gateway --bind 127.0.0.1:9002
macOS:
motorbridge-gateway --bind 127.0.0.1:9002
ou
DYLD_LIBRARY_PATH=/usr/local/lib motorbridge-gateway --bind 127.0.0.1:9002
Inicializar parâmetros de controle do motor RS
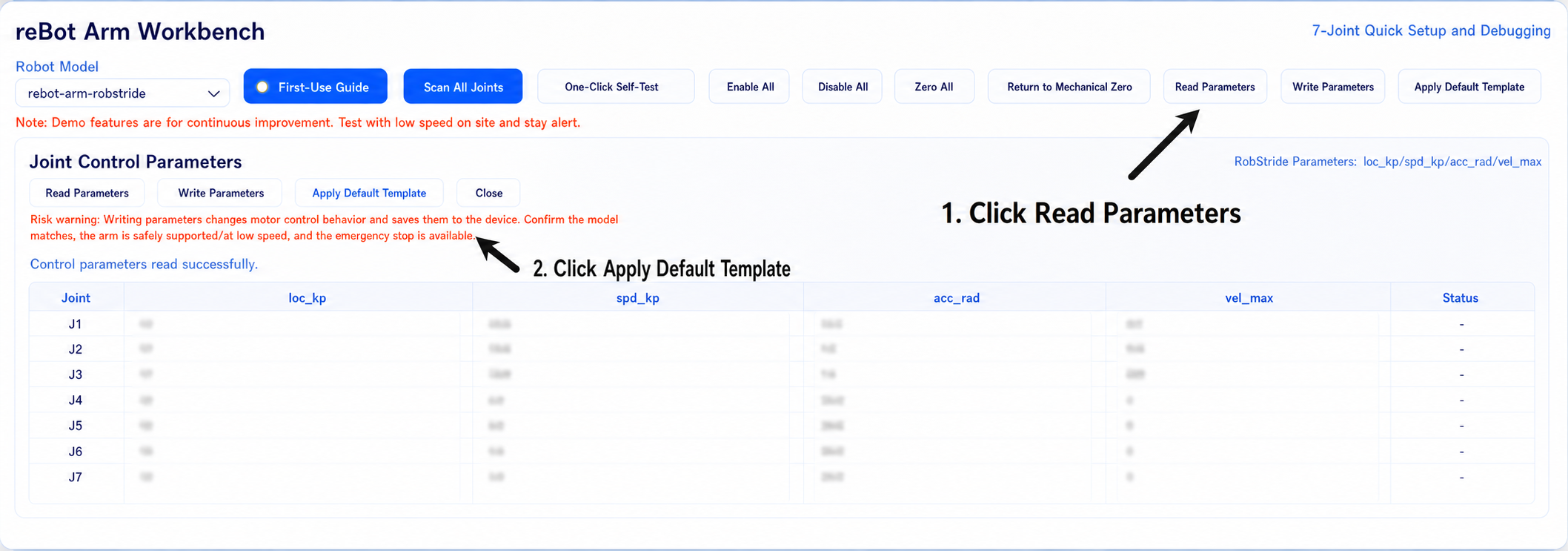
A maioria dos exemplos do reBot Arm B601-RS é executada no modo MIT. O modo Native Position (pos_vel) usa diretamente o ganho do loop de posição loc_kp e a velocidade máxima vel_max. Seu comportamento de movimento também é afetado pelo ganho do loop de velocidade spd_kp e pelo parâmetro de aceleração acc_rad. Se os parâmetros recomendados do B601-RS não tiverem sido inicializados ou se os parâmetros salvos em cada junta forem inconsistentes, o modo Position pode apresentar resposta, velocidade ou comportamento de aceleração e desaceleração anormais.
Primeiro selecione rebot-arm-robstride em Robot Model no MotorBridge Studio, faça a varredura e confirme que as Juntas 1-7 estão todas online e conclua a calibração de zero do braço robótico descrita acima. Em seguida, execute as seguintes etapas:
- Clique em Read Parameters para ler os parâmetros atualmente salvos em todas as juntas online. Esta operação apenas lê os dados e não modifica os motores. Aguarde até que a página informe que os parâmetros de controle foram lidos com sucesso e mantenha os valores atuais como registro.
- Clique em Apply Default Template e confirme que a página informa que o template de parâmetros padrão do reBot Arm RobStride foi aplicado às Juntas 1-7. Esta operação apenas carrega os valores recomendados na página; ela ainda não os grava nos motores.
- Clique em Write Parameters. Confirme que o braço robótico está apoiado com segurança e que não há pessoas ou obstáculos por perto e, em seguida, confirme a operação de gravação na caixa de diálogo. Não desconecte a alimentação nem conecte ou desconecte cabos do motor enquanto os parâmetros estiverem sendo gravados.
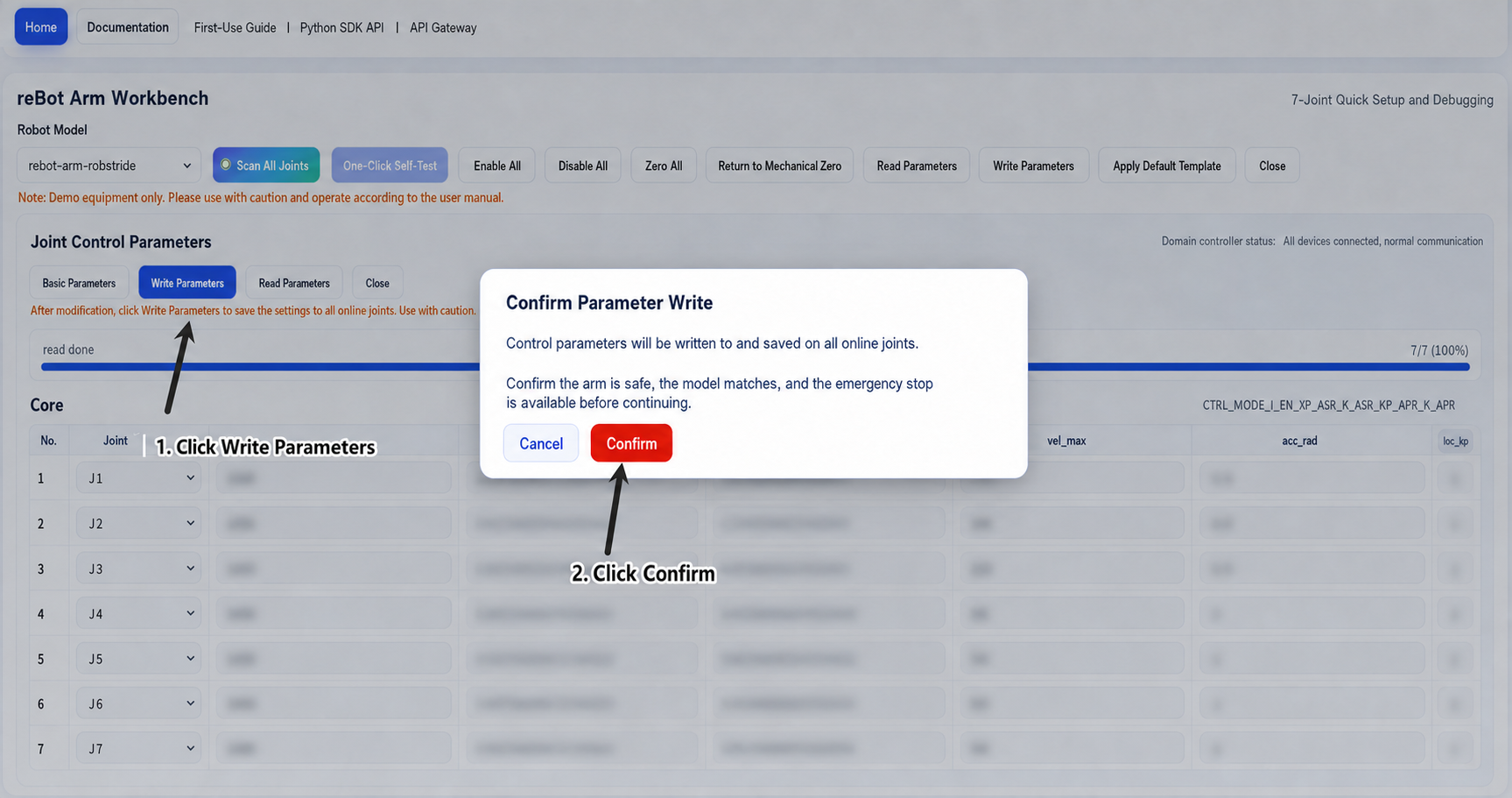
- Após a conclusão da gravação, o MotorBridge Studio lê automaticamente os parâmetros de volta. A inicialização será bem-sucedida quando a página informar que a verificação de leitura pós-gravação corresponde.