Primeiros passos com o reCamera Gimbal

Introdução
Bem-vindo ao reCamera Gimbal! A série reCamera gimbal 2002 é o primeiro sistema de controle de câmera de código aberto, composto por uma pequena câmera de IA - reCamera 2002w 8GB/64GB, e uma base de gimbal de 2 eixos compatível com 2 motores sem escova. Ele é alimentado por um SoC RISC-V, fornecendo 1 TOPS de desempenho de IA com codificação de vídeo em 5MP @ 30 FPS. Oferece um pacote de auto montagem estilo Lego e integra a plataforma de IA Sensecraft e a plataforma Node-RED para programação gráfica contínua e construção de pipelines, permitindo auto treinamento rápido, conversão de modelos e implantação de modelos de IA como Yolo v5/v8/11.
Este guia ajudará você a configurar rapidamente seu dispositivo e começar a usá-lo para desbloquear poderosos recursos de visão com IA. Seja você iniciante ou usuário experiente, este passo a passo o guiará pela instalação, configuração e primeiro uso.
Pré-requisitos
- reCamera Gimbal
- Manual do usuário (dentro da caixa)
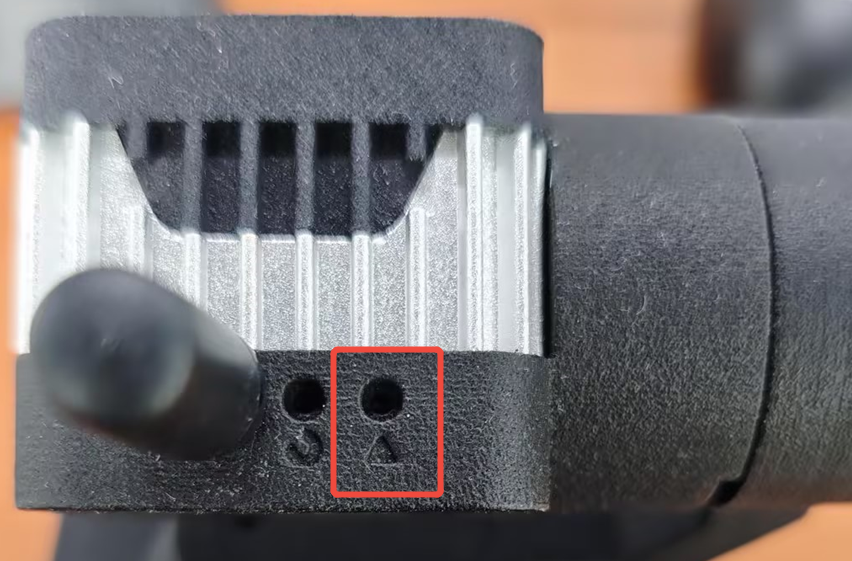
- Fonte de alimentação DC 12V para conector DC 5521 (Purchase link)
- USB Tipo C (Purchase lini)
- Conexão Wi-Fi
- Chave de fenda elétrica (opcional para uma melhor experiência de montagem)
Desembalagem
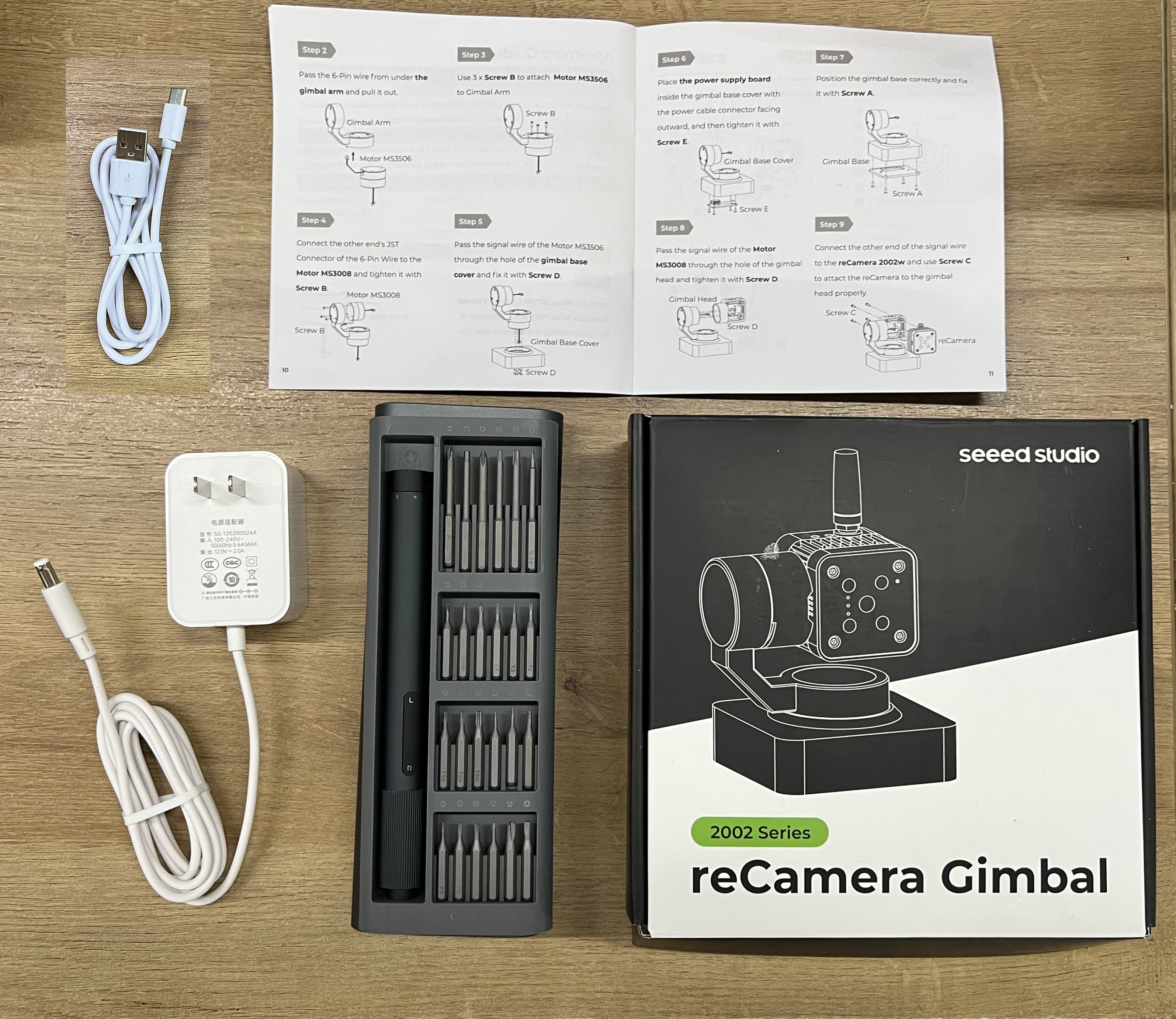
Comece desempacotando seu reCamera Gimbal. Dentro da caixa, você deve encontrar:
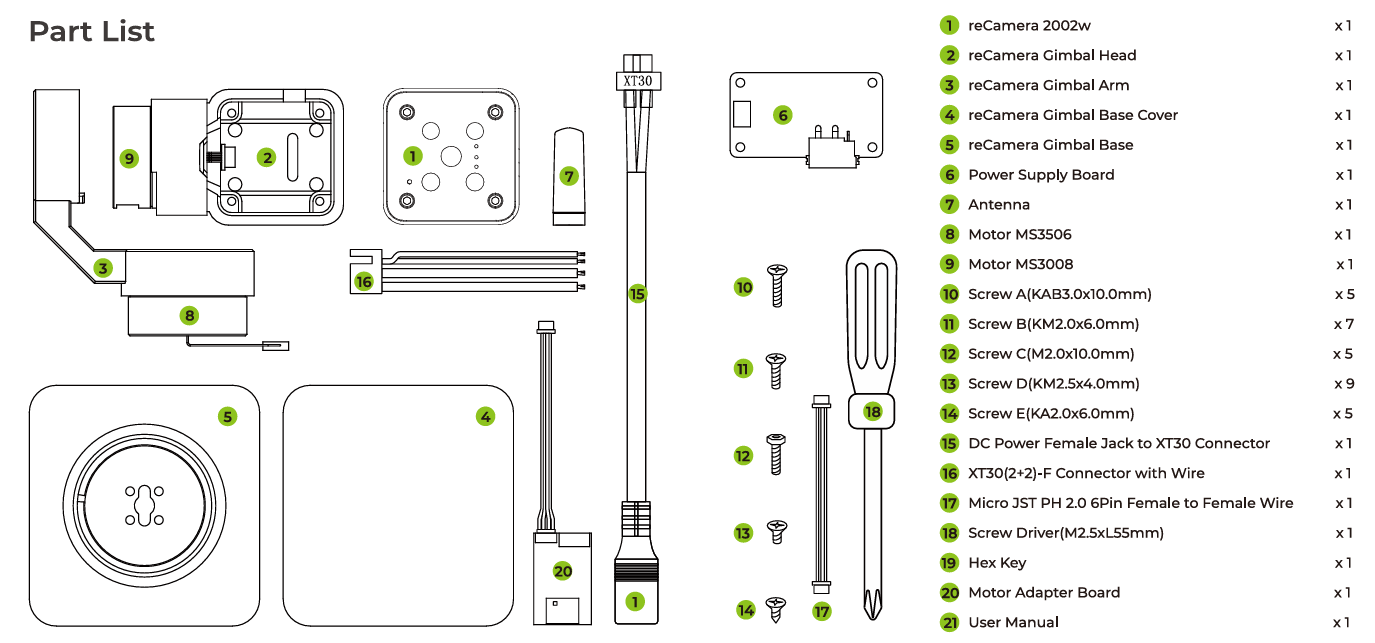
Certifique-se de que todas as partes estejam incluídas.
Montagem de hardware
Monte o reCamea Gimbal de acordo com as instruções de montagem na caixa ou no manual do usuário.
Certifique-se de que todos os parafusos estejam bem apertados, caso contrário isso afetará o funcionamento do motor.
Configurar o dispositivo e fazer login
Passo 1: Após montar o Gimbal, conecte o cabo USB do reCamera Gimbal ao seu PC. Acesse 192.168.42.1 no navegador e altere a senha padrão. Se você estiver usando o modo de configuração WiFi AP, acesse em vez disso 192.168.16.1
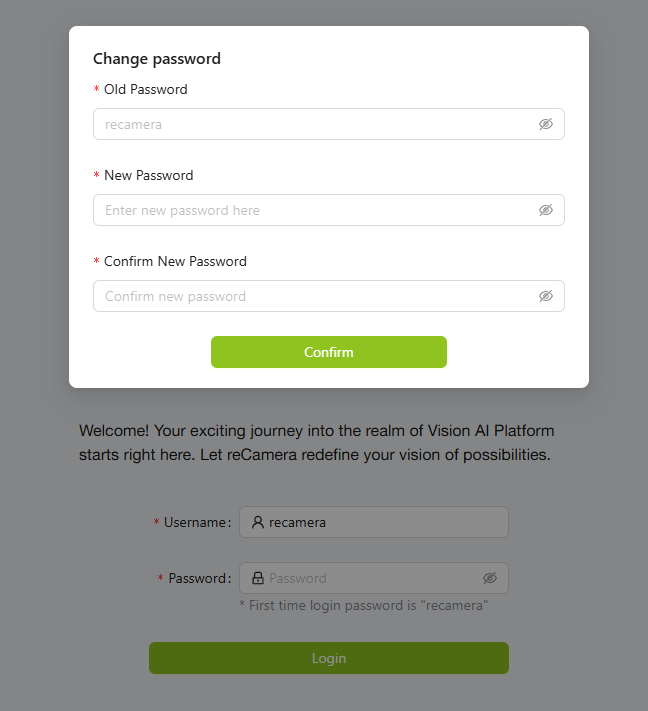
Lembre-se da sua senha, caso contrário todos os logs serão apagados para redefinir seu dispositivo. Se você esquecer a senha, por favor faça o reset de fábrica do seu dispositivo.
O nome de usuário e a senha padrão são ambos recamera. Se você realizar um reset de fábrica ou estiver usando um dispositivo novo (não configurado), estes são o nome de usuário e a senha a serem usados.
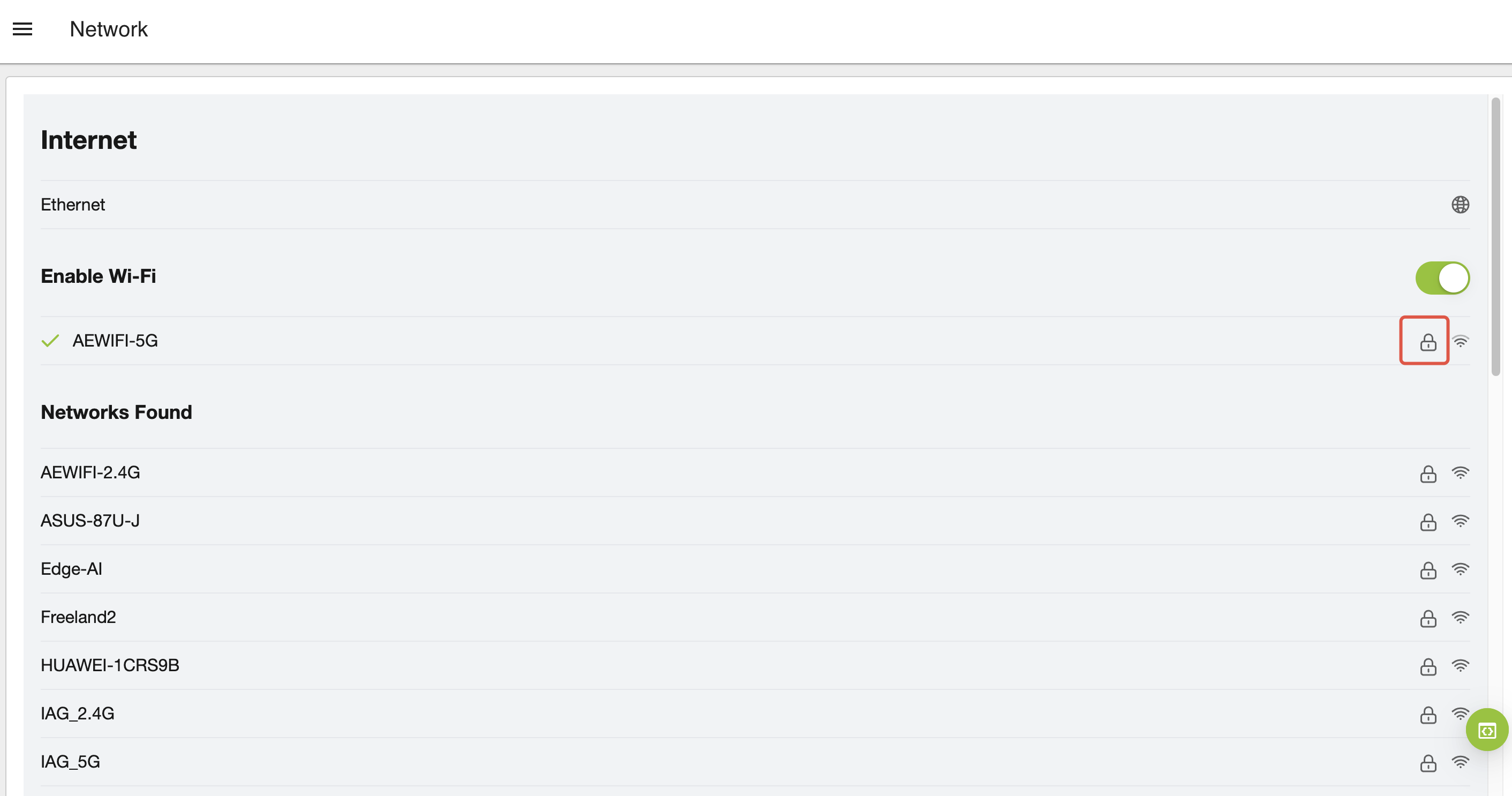
Passo 2: Aqui você será levado ao Dashboard de Pré-visualização do Gimbal. Antes de experimentar alguns movimentos do motor com os controles no Dashboard, por favor vá para Network para configurar o Wi-Fi.
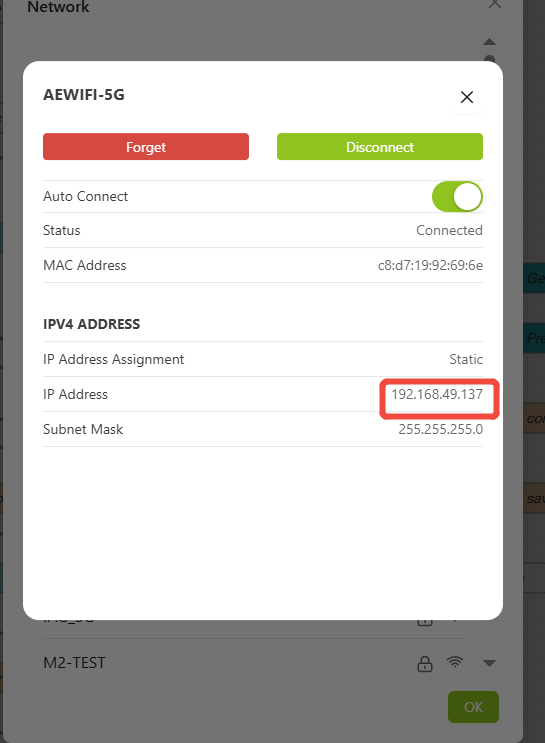
Passo 3: Conecte-se ao seu Wi-Fi. Após conectar-se com sucesso ao Wi-Fi, clique no lock icon para ver o endereço IP do dispositivo.
Passo 4: Abra uma nova aba do navegador e use esse endereço IP para acessar o dispositivo.
Passo 6: Conecte primeiro a energia à base e, em seguida, remova o cabo USB tipo C para obter os melhores movimentos do motor.
Deve ser conectada a fonte de alimentação com tensão de 12V.

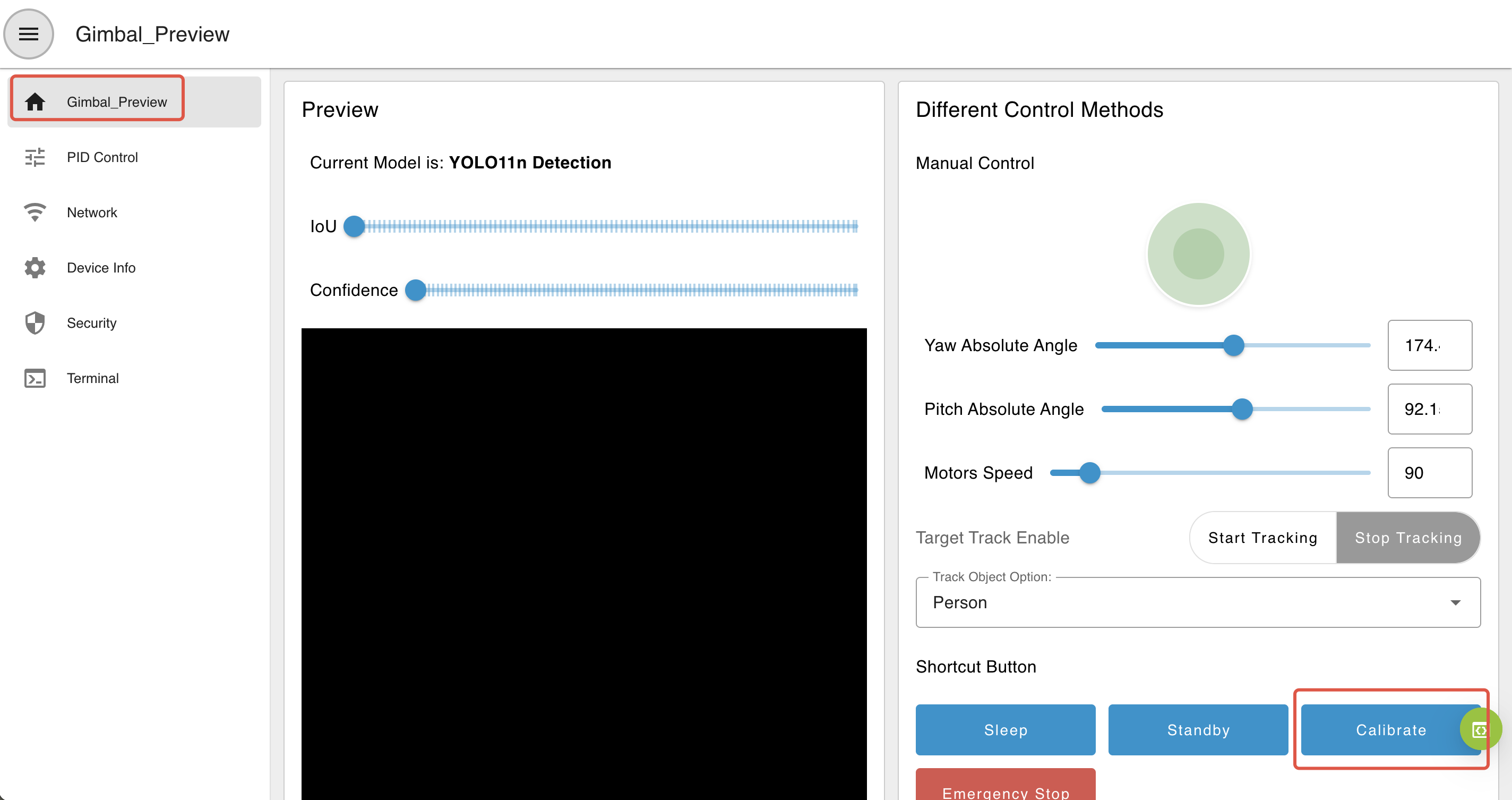
Passo 7: Volte ao navegador com o seu ip address para visitar o dashboard, então clique no Calibrate button no lado direito para que o seu Gimbal se calibre sozinho.
Durante a calibração, evite interferir na operação do dispositivo, pois isso pode resultar em falha na calibração. A calibração é realizada automaticamente cada vez que o gimbal é ligado.
Comportamento de calibração
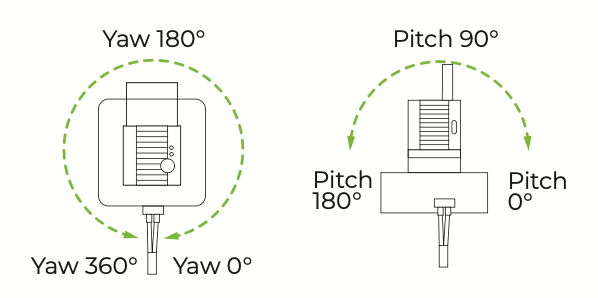
O eixo de guinada (yaw) tem uma faixa de movimento de 0–360°, embora a faixa mecânica real seja limitada a aproximadamente 345° devido a restrições estruturais. No entanto, a cobertura de visão permanece em 360°. O eixo de inclinação (pitch) suporta uma faixa de movimento de 0–180°.
Ao ligar, o gimbal iniciará sua sequência de calibração automática:
-
Eixo de guinada (Yaw): O gimbal primeiro girará no sentido horário em direção ao seu limite mecânico (posicionado acima do cabo de alimentação), depois girará no sentido anti-horário até o limite oposto. Após alcançar ambas as extremidades, ele retornará à posição central.
-
Eixo de inclinação (Pitch): O gimbal irá inclinar-se para cima até a posição de 0°, depois para baixo até alcançar o limite de 180° e, por fim, retornará ao centro.

Essa sequência conclui o processo de auto calibração do gimbal.
Você também pode calibrar digitando este comando no terminal
gimbal cali
Solução de problemas de calibração
Se o gimbal não executar corretamente a sequência de calibração, pode haver várias causas potenciais:
-
Verificar as limitações mecânicas: Verifique manualmente o gimbal para garantir que a faixa de movimento não esteja obstruída ou limitada de forma incorreta.
-
Verificar a resistência de peças impressas em 3D: Sinta se há alguma resistência quando o motor se move. Se a resistência for excessiva, talvez seja necessário ajustar as configurações PID do motor para aumentar a força do motor. Você pode ver como ajustar o PID aqui. Como alternativa, reduza o atrito lixando quaisquer peças ou afrouxando levemente os parafusos para melhorar o movimento.
Acesso Web básico
URLs da Web:
-
Página de pré-visualização:
ip_address/#/dashboard -
Página inicial:
ip_address/#/init -
Workspace:
ip_address/#/workspace -
Configuração de rede:
ip_address/#/network -
Segurança:
ip_address/#/security -
Terminal:
ip_address/#/terminal -
Sistema:
ip_address/#/system -
Energia:
ip_address/#/power -
Node-RED original:
ip_address:1880
Início rápido com o Dashboard do Gimbal
Controle dos motores
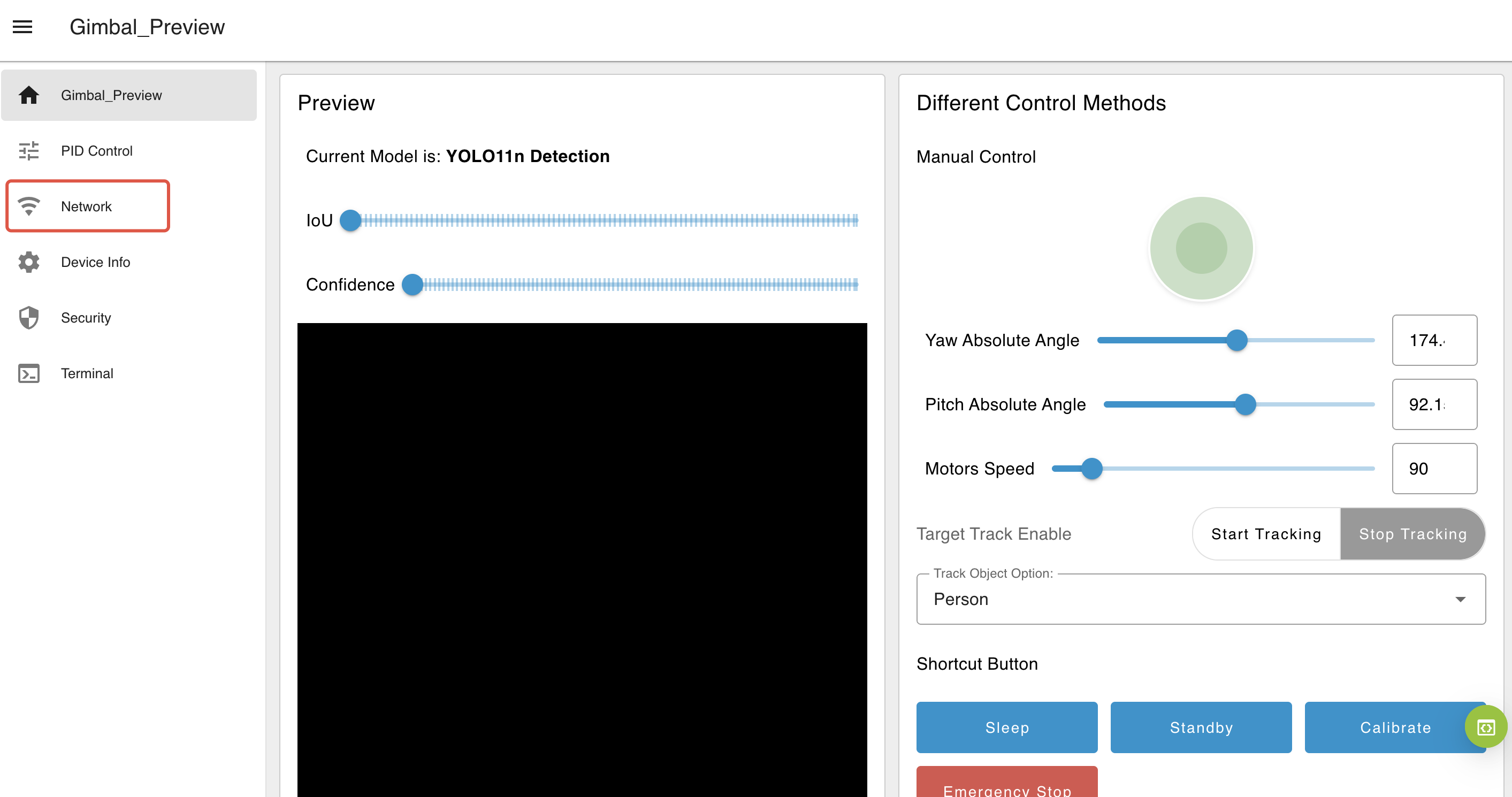
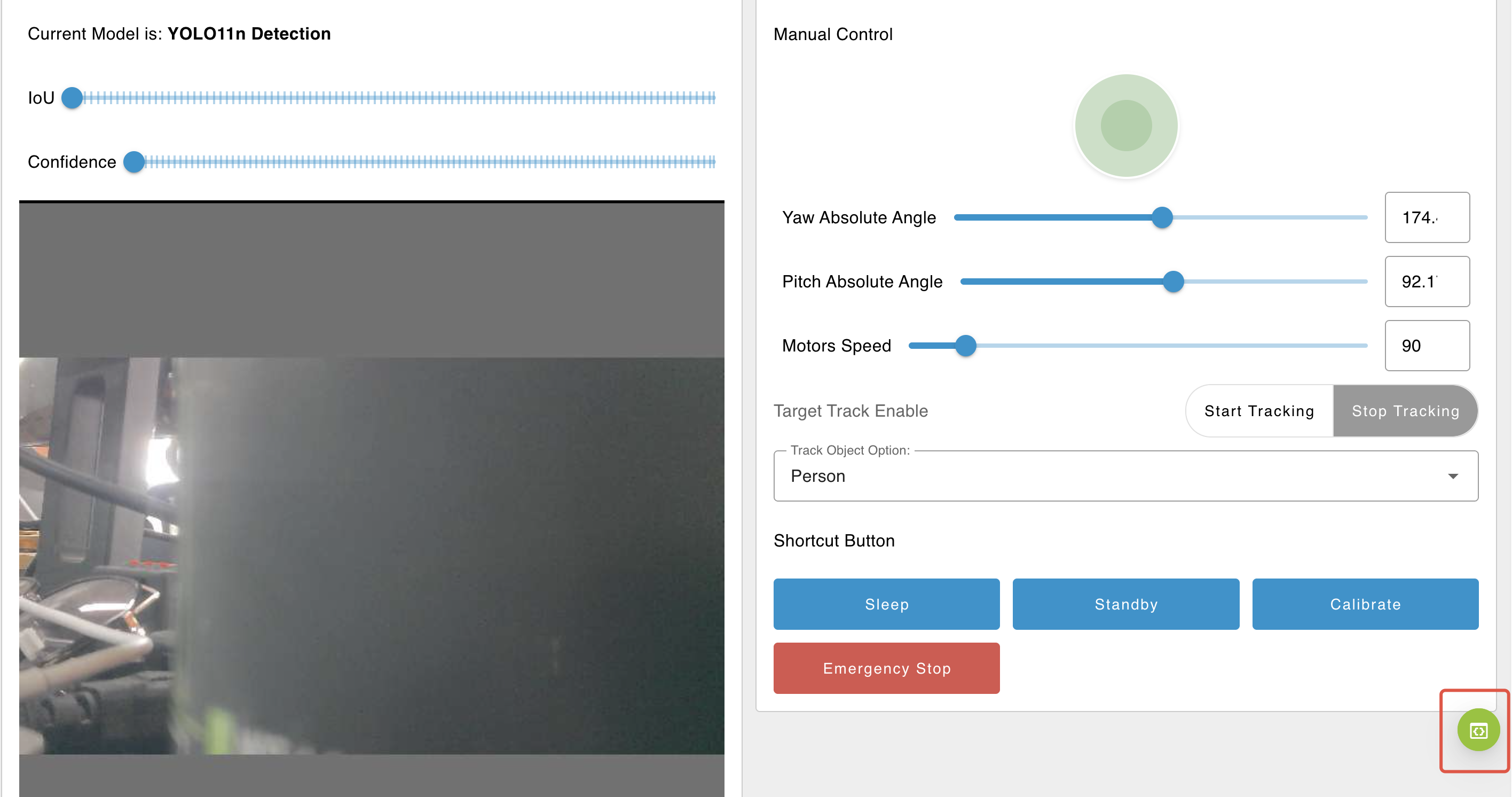
Após a conclusão da configuração e calibração, você pode controlar o gimbal usando as opções disponíveis no dashboard. Visite ip_address/#/dashboard ou ip_address para acessar o dashboard de pré-visualização do Gimbal feito com nós do Node-RED:
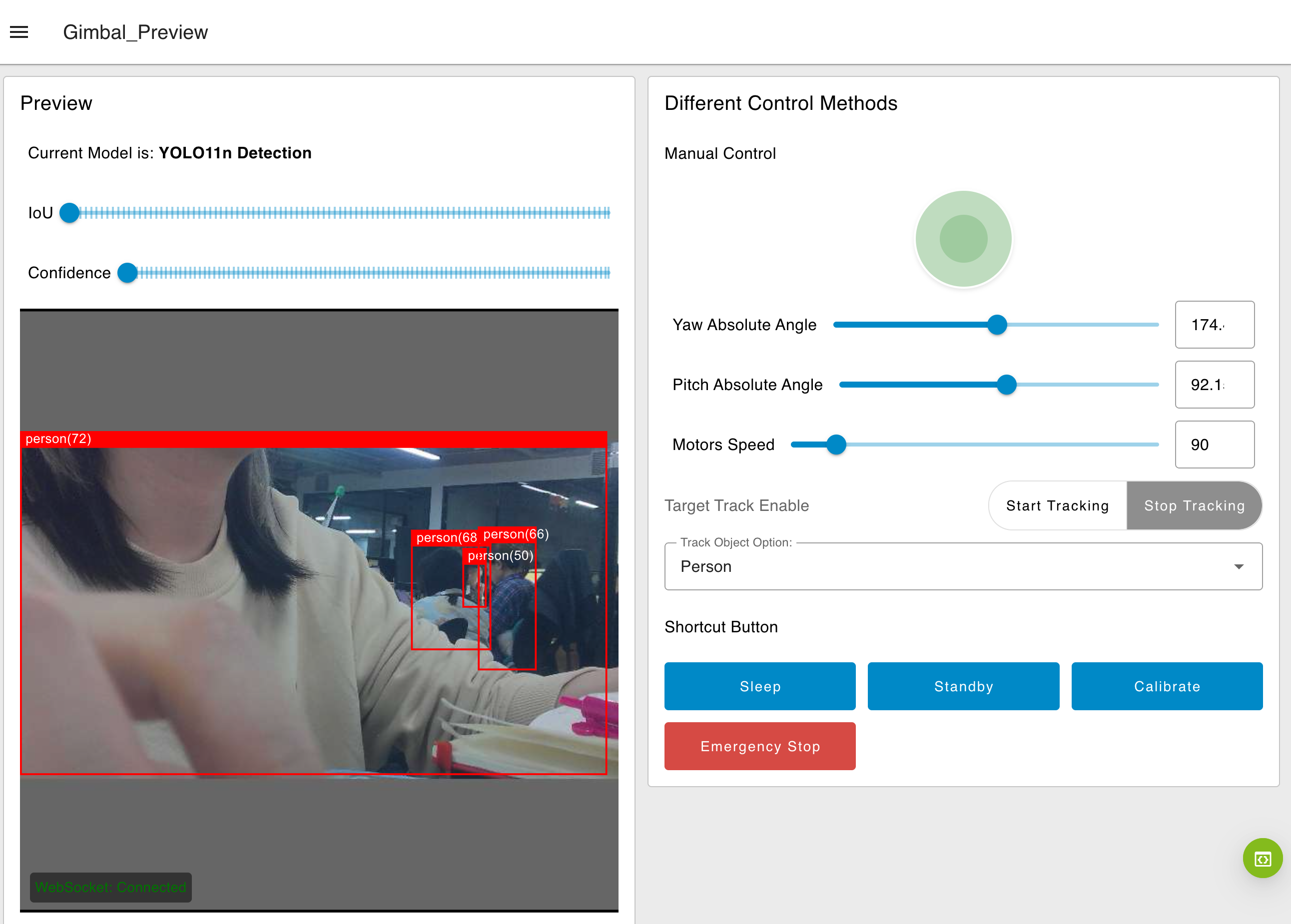
- Joystick: Controla a direção do campo de visão da câmera. Por exemplo, arrastar o joystick para a direita faz com que a imagem se mova para a direita de forma correspondente.
- Sliders:
-
Sliders de yaw e pitch: Movem o gimbal para um ângulo absoluto especificado.
Faixa de yaw: 0–360°
Faixa de pitch: 0–180°
-
Devido a restrições estruturais, a faixa de yaw é limitada a 0–345° e a faixa de pitch é limitada a 0–180°. Quaisquer valores inseridos fora dessas faixas serão ajustados para o limite mais próximo. Por exemplo, se você inserir 360° para yaw, o sistema executará automaticamente o movimento como 345°.
-
Slider de velocidade: Ajusta a velocidade de ambos os motores simultaneamente.
Faixa de velocidade: 0–720°/s (graus por segundo)
-
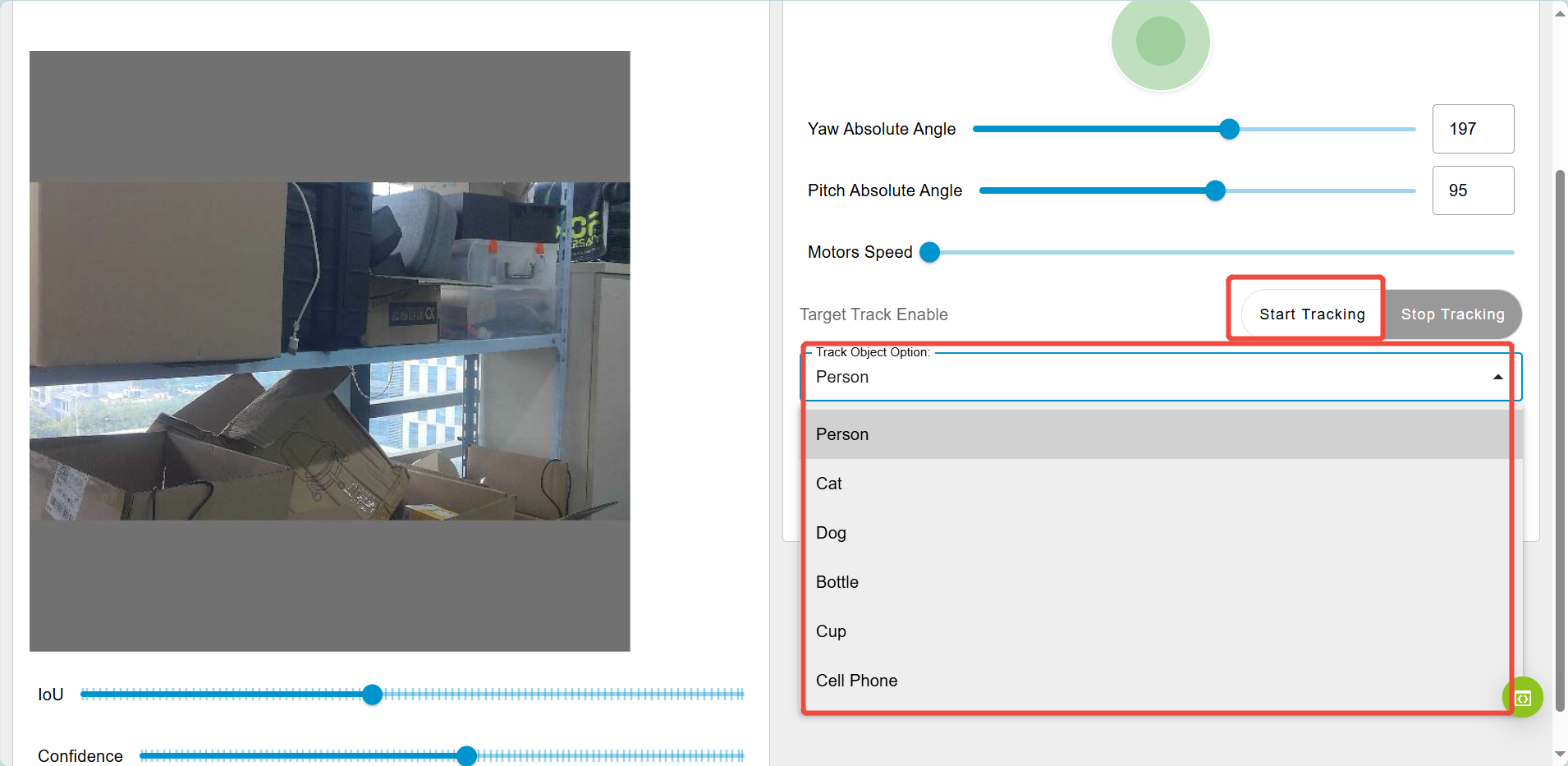
Auto-Tracking: Selecione um objeto-alvo no menu suspenso (por exemplo, pessoa, carro, gato, cachorro, garrafa) e clique em
Start Trackingpara iniciar o rastreamento automático de objeto. Clique emStop Trackingpara encerrar o rastreamento.
- Botão Sleep: Move o gimbal para uma posição absoluta de (Yaw: 180°, Pitch: 180°).
O botão Sleep não ativa um modo de baixo consumo de energia. Ele simplesmente reposiciona a câmera para ficar voltada para baixo.
-
Botão Standby: Move o gimbal para uma posição absoluta de (Yaw: 180°, Pitch: 90°).
-
Botão Calibrate: Inicia o processo de calibração do gimbal.
-
Botão Emergency Stop: Desativa imediatamente ambos os motores durante o movimento.
⚠️ Nota: Isto não interromperá o processo de calibração.
Parâmetros do modelo de IA
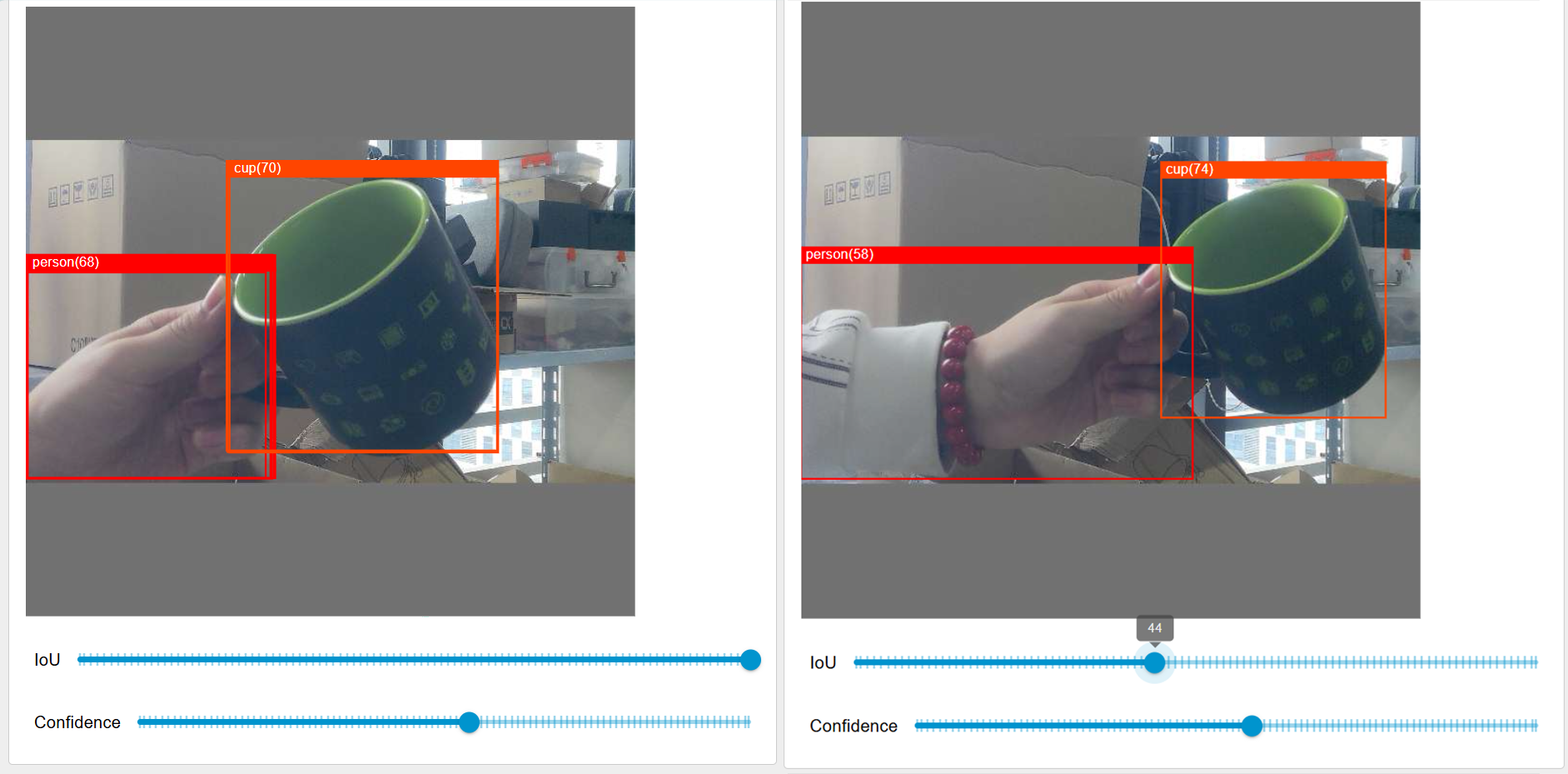
Confidence: A confiança no modelo YOLO representa a probabilidade de que uma bounding box prevista contenha um objeto e o quão precisa é a previsão. É um valor entre 0 e 100.
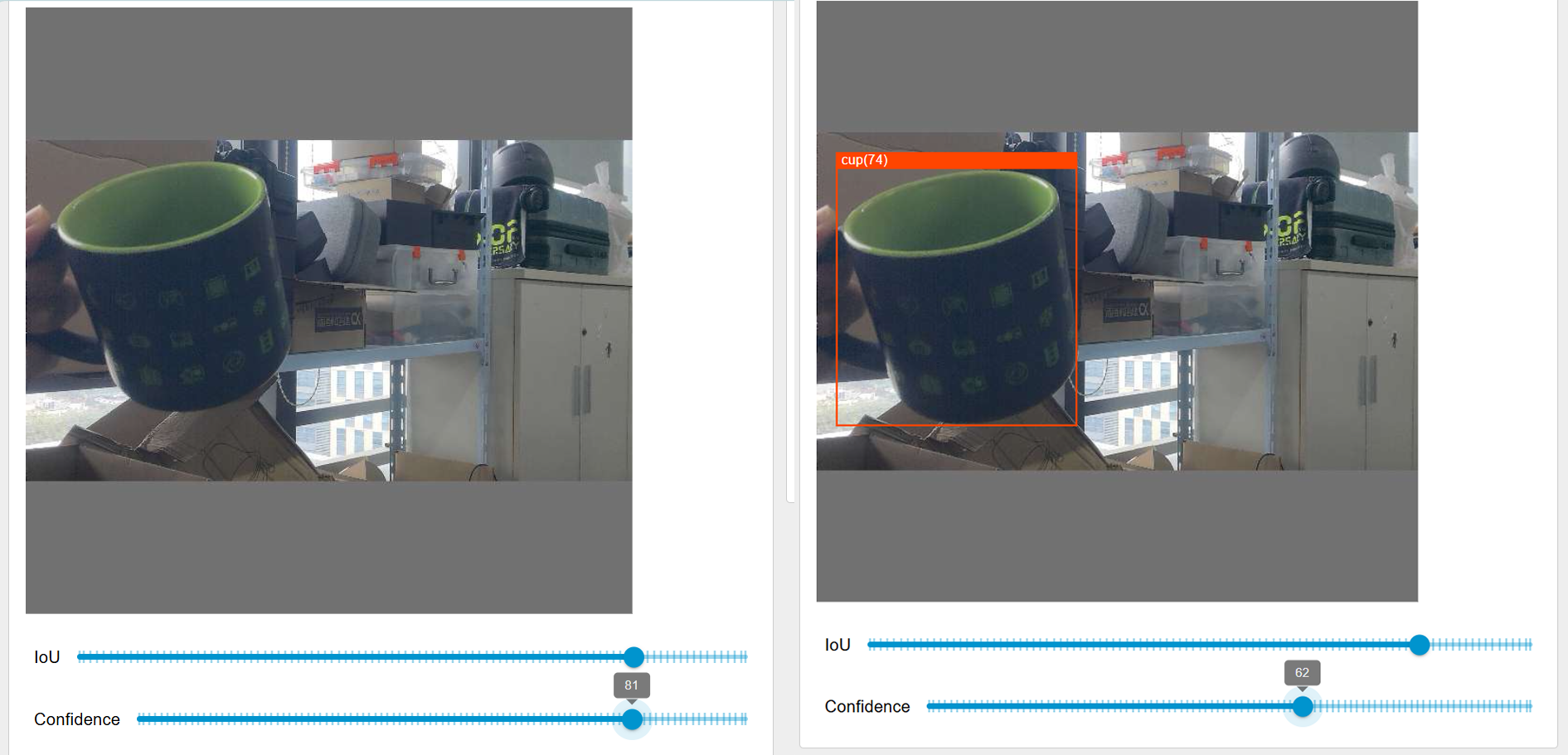
Intersection over Union (IoU): IoU é uma métrica usada para avaliar a sobreposição entre a bounding box prevista e a bounding box de referência (ground truth). É calculada como a razão entre a área de interseção das duas caixas e a área de união das duas caixas. O valor de IoU é tipicamente no intervalo de 0 a 1. Nós o padronizamos para uma escala de 0 - 100; um valor de IoU de 0 representa nenhuma sobreposição entre a caixa prevista e a caixa de referência. Um valor de 100 indica uma correspondência perfeita, significando que as duas caixas se sobrepõem completamente.
Introdução rápida ao fluxo do painel do Gimbal
Se você quiser saber como o painel é feito com nós do Node-RED, clique no canto inferior direito ou visite ip_address/#/workspace para acessar o workspace Node-RED do Gimbal
Em seguida, você verá o fluxo padrão do painel do gimbal; você pode dar um clique duplo em cada nó para ver o detalhe do nó. O fluxo do painel ficará assim:
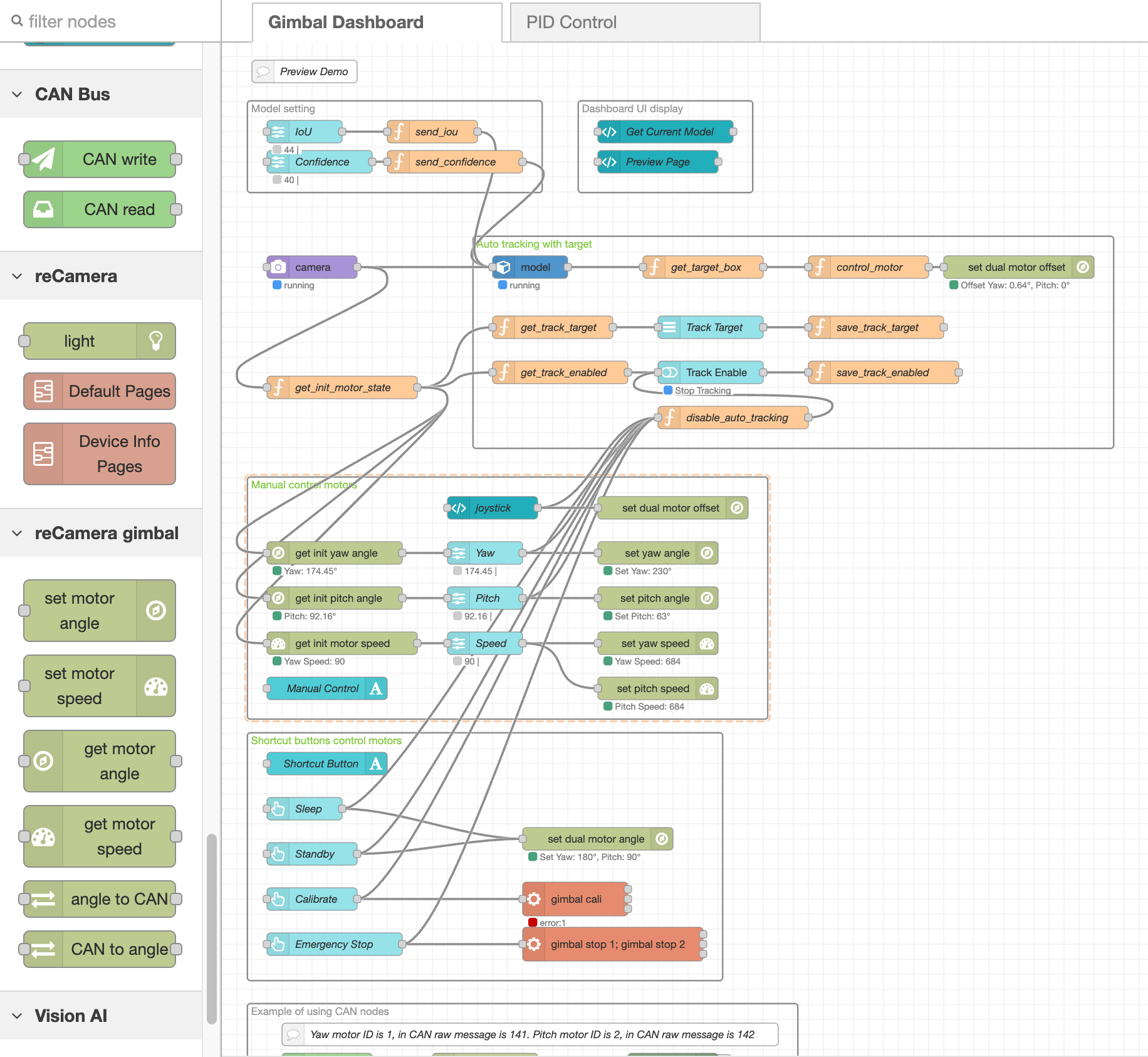
Configurações do Modelo:
- Nós de controle deslizante permitem que você ajuste o IoU (Intersection over Union) e o limite de confiança para o modelo de IA YOLO.
Exibição da Interface do Painel:
- O nó de modelo de interface de usuário exibe um texto mostrando as configurações atuais do modelo.
- Ele também renderiza a imagem em base64 da câmera, incluindo caixas de detecção para objetos identificados pelo YOLO.
Rastreamento Automático com Alvo:
-
Nós de função obtêm informações sobre o objeto alvo (por exemplo, largura, altura, coordenadas) e processam esses dados usando um algoritmo de rastreamento.
-
O nó de função do algoritmo calcula o desvio do centro da caixa do alvo em relação ao centro da visão e envia esse desvio para o nó de definição de ângulo do motor para mover o gimbal para a posição desejada.
Controle Manual do Motor:
-
Use nós de controle deslizante para definir manualmente os ângulos do motor, movendo o gimbal por um grau específico.
-
Como alternativa, o nó de interface de usuário do joystick permite o controle manual ajustando a posição do gimbal em pequenos incrementos (desvio por desvio).
Botões de Atalho:
-
Nós de botão da interface de usuário enviam posições específicas para o nó de definição de ângulo do motor, acionando comportamentos como Sleep ou Standby.
-
Esses botões também podem acionar nós
execque executam scripts bash comogimbal calipara calibração ougimbal stop 1; gimbal stop 2para uma parada de emergência.
Subfluxo Básico de Iframe Web:
-
Um subfluxo de iframe exibe páginas web básicas como configurações de rede, informações do sistema e informações do dispositivo.
-
Observe que isso pode consumir recursos de CPU, pois renderiza a página com vários nós. Ele pode ser excluído se não for necessário.
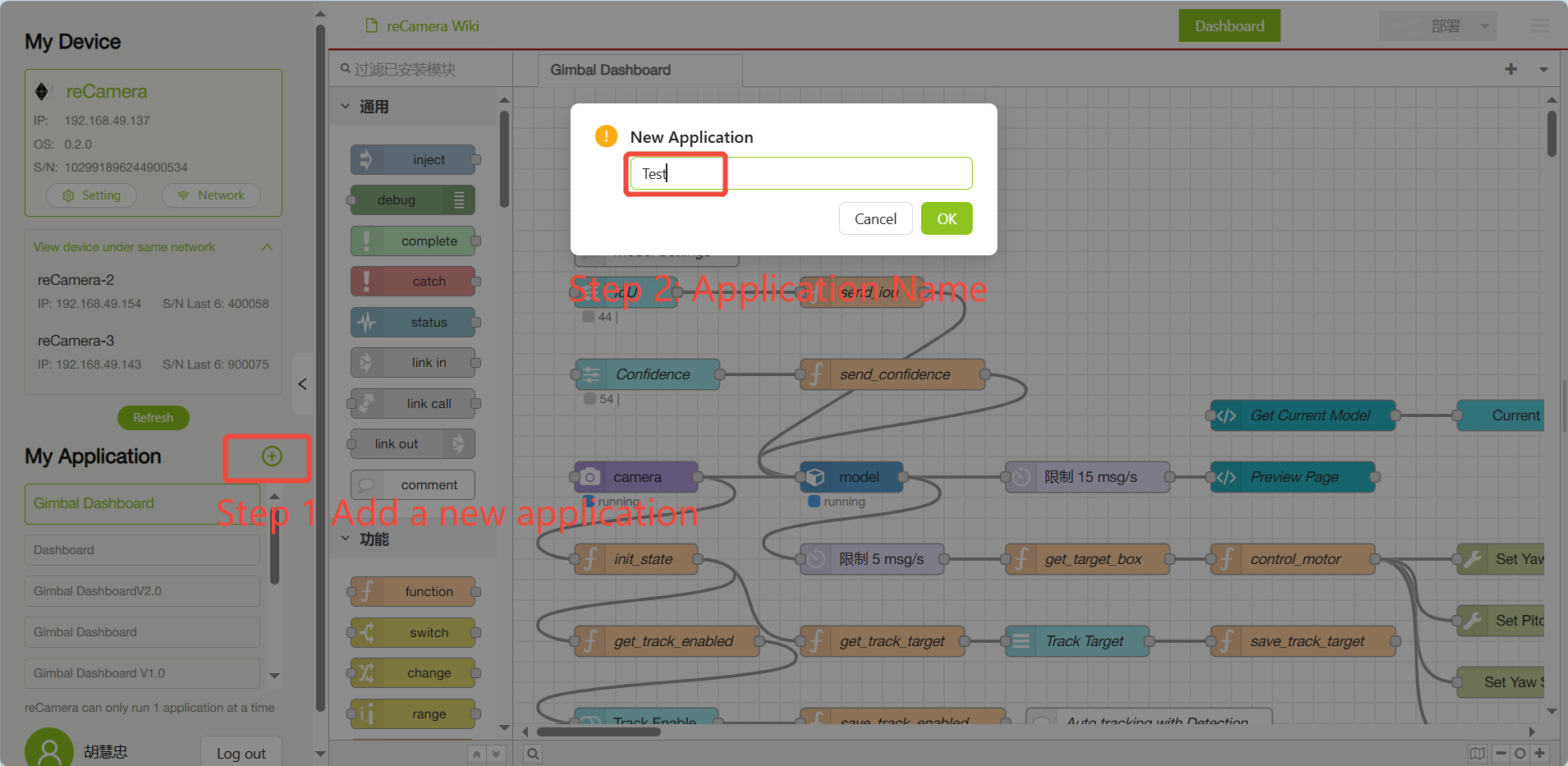
Aplicar gerenciamento em nuvem e backup
Se você quiser criar um novo aplicativo ou salvar aplicativos no serviço em nuvem SenseCraft, você pode fazer login na conta sensecraft no canto inferior esquerdo e, em seguida, clicar no ícone + para adicionar um novo aplicativo. Depois disso, você pode começar a trabalhar no seu fluxo.
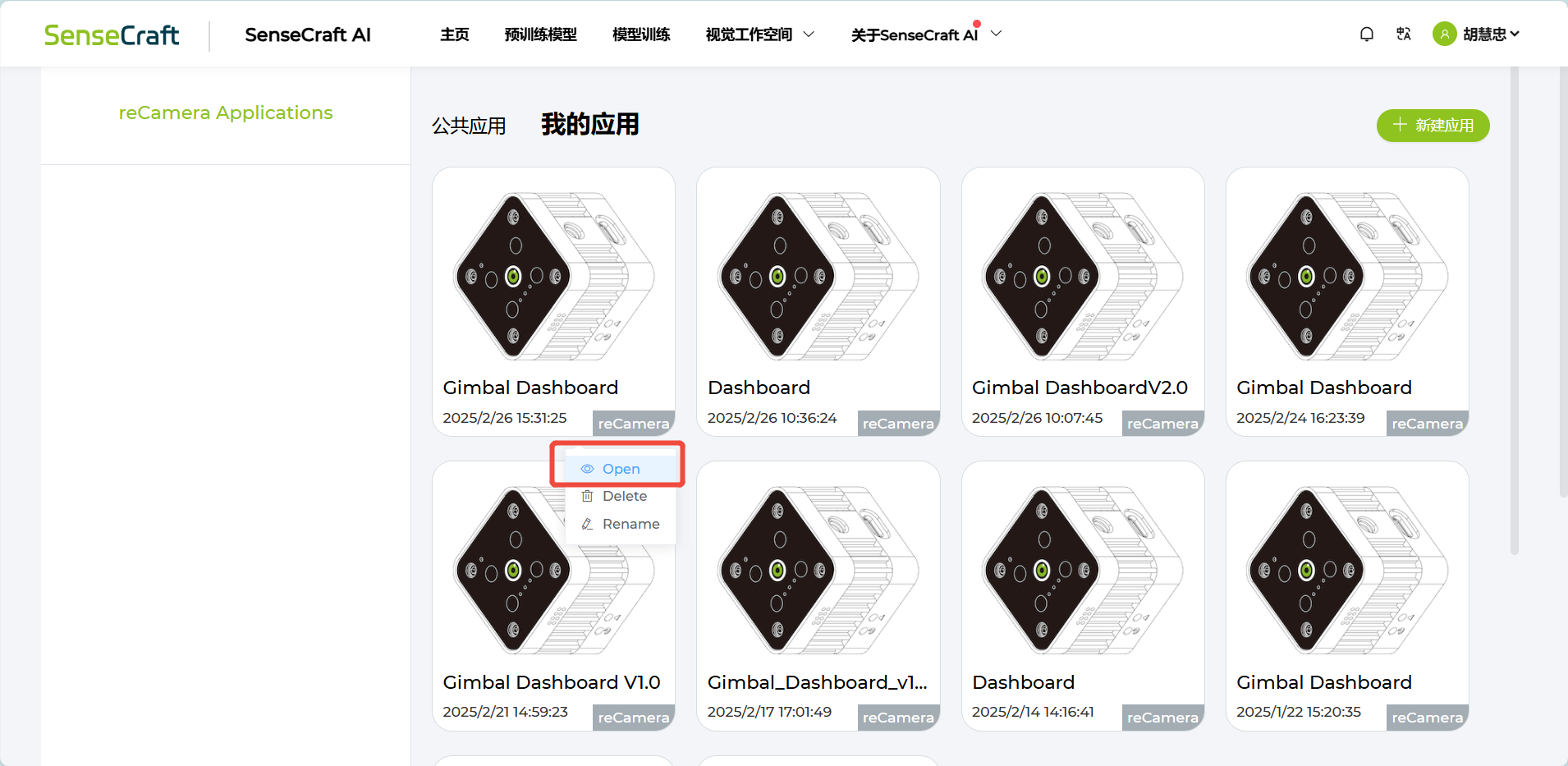
Você pode visualizar e gerenciar seus apps em reCamera - SenseCraft AI.
Você precisa registrar uma conta antes de fazer login pela plataforma para sincronizar seus aplicativos.
Lista de Portas
A seguir são listadas as portas usadas pelo reCamera Gimbal:
- Porta 22: Utilizada para login remoto por SSH e está aberta.
- Porta 53: Associada à resolução de nomes de domínio DNS e é essencial para o redirecionamento web. Ela é aberta por padrão.
- Porta 80: Serve como interface do painel web para exibição HTTP da aplicação Node-RED.
- Porta 554: Empregada para streaming de vídeo RTSP.
- Porta 9090: Destinada ao acesso ao terminal web, que requer uma senha para login.
- Porta 1880: Dedicada às operações do Node-RED.
Atualização de SO via OTA
Consulte as Instruções de Atualização OTA.
Restauração de Fábrica
Se você quiser redefinir o dispositivo, por exemplo, ao esquecer o código de acesso do dispositivo, você pode manter pressionado o botão User e então conectar o dispositivo à energia. Quando a luz vermelha do dispositivo estiver constantemente acesa em vez de piscando, solte o botão User.
Recursos
Suporte Técnico & Discussão sobre o Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.