Visão Geral do reCamera Gimbal
O reCamera Gimbal Série 2002 é o primeiro sistema de controle de câmera de código aberto com câmera de IA de 1TOPS (reCamera) e gimbal de 2 eixos. Seus motores brushless duplos permitem 360° de guinada e 180° de inclinação para cobertura total.
Recursos
- Ecossistema totalmente de código aberto em hardware e software
- Configuração rápida e movimento de precisão
- Suporte a pacote de montagem tipo Lego
- Rotação de guinada 360° com cobertura total e alcance de inclinação de 180° do chão ao teto
- Precisão do motor brushless: precisão de passo de 0,01° para rastreamento suave de alvos.
- Controle de movimento com IA
- Modelos de IA personalizados prontos: YOLO11 integrado com licença comercial, suporte a Roboflow e SenseCraft AI.
- Rastreamento inteligente: a IA ajusta automaticamente o movimento do gimbal.
- Desenvolvimento flexível para todos os níveis de habilidade
- Node-RED integrado para customização de fluxo low-code do movimento do gimbal.
- SDK em C++ suportado para desenvolvimento mais aprofundado.
Especificações
Sistema de Processamento
| Parâmetro | Valor |
|---|---|
| SOC | SG2002 |
| CPU | C906@1GHz + C906@700MHz |
| Desempenho de IA | 1 Tops @ Int8 |
| MCU | 8051 @ 8KB SRAM |
| Sistema Operacional | Linux |
| Memória | 256 MB |
| Codificador de Vídeo | 5MP @ 30Fps |
Básico
| Parâmetro | Valor |
|---|---|
| eMMC | 8GB / 64GB |
| Fonte de Alimentação | Conector Jack DC 12V para conector XT30 |
| Consumo de Energia | 12V, 185mA (estático) |
Câmera
| Parâmetro | Valor |
|---|---|
| Sensor | OV5647 |
| Resolução | 5M (2592×1944) Pixels |
| Chip | Sensor CMOS 1/4" |
| Tamanho de Pixel | 1.4μm |
| Formato de Saída | RAW 10 |
| Taxa Máx. de Quadros | Tamanho total: 15fps |
| Abertura | F2.8 |
| Distância Focal Equivalente | 3.46mm |
| Campo de Visão | 65° |
| Distorção | <1% |
| Estrutura da Lente | 5P |
Interface
| Parâmetro | Valor |
|---|---|
| USB | USB 2.0 Tipo-C |
| Sem Fio | Wi-Fi 2.4G/5G Bluetooth 4.2/5.0 |
| Botão | 1 × Botão de Reinício, 1 × Botão de Usuário |
| LEDs de Iluminação | 4 × 0.3W Luz Branca |
| LED | 1 × Indicador de Energia, 2 × Indicadores programáveis de IO |
| Mic | Mic on-board |
| Alto-falante | Alto-falante externo |
Especificação do Motor
| Parâmetro | MS3008 | MS3506 |
|---|---|---|
| Voltas | 54 | 60 |
| Tensão Nominal (V) | 12 | 12 |
| Velocidade Máx. (rpm) | 2000 | 2100 |
| Torque Nominal (N·m) | 0.04 | 0.05 |
| Velocidade Nominal (rpm) | 1160 | 1250 |
| Corrente Nominal (A) | 0.64 | 0.79 |
| Potência Máx. (W) | 4.6 | 6.4 |
| Pólos do Motor | 14 | 14 |
| Temperatura de Operação (℃) | -25~60 | -25~60 |
| Peso (g) | 49 | 63 |
| Tensão de Entrada de Drive (V) | 6~16 | 6~16 |
| Comunicação | CAN | CAN |
| Frequência de Comunicação | CAN@1Mbps:2KHz | CAN@1Mbps:2KHz |
| Encoder | Encoder Magnético de 15 bits | Encoder Magnético de 15 bits |
| Taxa de Baud CAN | 100K、125K、250K、500K、1M | 100K、125K、250K、500K、1M |
| Modo de Controle | Open Loop(24KHz) / Speed Loop(4KHz) / Position Loop(2KHz) | Open Loop(24KHz) / Speed Loop(4KHz) / Position Loop(2KHz) |
Especificação do Gimbal
| Parâmetro | Valor |
|---|---|
| Faixa de Inclinação (Pitch) | 0~180° |
| Faixa de Guinada (Yaw) | 0~360° |
Condições Ambientais
| Parâmetro | Valor |
|---|---|
| Temperatura de Operação | -20~50 ℃ |
| Umidade de Operação | 0~90% |
Mecânico
| Parâmetro | Valor |
|---|---|
| Dimensão (L × A × P) | 68×112×71mm |
| Gabinete | Poliamida (PA) Nylon |
| Peso (Líquido) | 230g |
Outros
| Parâmetro | Valor |
|---|---|
| Garantia | 1 ano |
Visão Geral do Hardware

Placa Principal-C101
Clique para baixar o arquivo PCBA de 8GB
Clique para baixar o arquivo PCBA de 64GB
| Vista Superior | Vista Inferior |
|---|


Diagrama de Blocos

Placa de Sensor-S101
Clique para baixar o arquivo PCBA
| Vista Superior | Vista Inferior |
|---|


Placa de Base-B401
Clique para baixar o arquivo PCBA
| Vista Superior | Vista Inferior |
|---|


Diagrama de Blocos

Placa de Fonte de Alimentação
Esta placa de fonte de alimentação fornece funções duplas de fornecimento estável de energia e proteção contra sobretensão. Ela suporta entrada DC de 12 V para alimentar tanto os motores quanto os sistemas reCamera.
Limiares de Proteção Contra Sobretensão:
- Tensão Máxima de Desarme: 25,66 V
- Tensão de Operação Normal: 25,54 V
- Tensão Mínima Segura: 25,4 V
Clique para baixar o arquivo de PCBA
Diagrama de Blocos

Interface de Hardware
Luz
Há 3 indicadores na recamera, as luzes vermelha e azul são indicadores programáveis, e o indicador verde é o indicador de energia, que não é programável. Vermelho é o indicador de status da CPU e azul é o indicador de status de leitura da eMMC do sistema.
Status dos Indicadores de Luz:
| LED(cor) | Status | Descrição |
|---|---|---|
| LED1 - Verde | LIGADO | Energia Ligada |
| LED2 - Vermelho | Piscando | CPU em Funcionamento(definido pelo usuário) |
| LED3 - Azul | Piscando | Leitura/Gravação da eMMC |
Exemplo 1: Use o comando linux para alterar o brilho do LED vermelho para zero
echo 0 | sudo tee /sys/class/leds/red/brightness
Exemplo 2: desligar completamente a luz vermelha
echo none | sudo tee /sys/class/leds/red/trigger
Existem quatro luzes brancas, que são as luzes de preenchimento da câmera. O interruptor das luzes de preenchimento pode ser controlado pelas instruções a seguir.
echo 1 > /sys/devices/platform/leds/leds/white/brightness //light on
echo 0 > /sys/devices/platform/leds/leds/white/brightness //light off
Microfone e Alto-falante
A recamera possui um microfone e um alto-falante. Você pode invocar o microfone e o alto-falante com o seguinte comando. A recamera pode reproduzir arquivos de áudio no formato wav.
sudo arecord -D hw:0,0 -r 16000 -f S16_LE -c 1 -d 5 /home/recamera/test.wav //Record five seconds of audio
sudo aplay -D hw:1,0 /home/recamera/test.wav //Playing audio
Arquivos de áudio mp3 locais podem ser convertidos em arquivos wav para reprodução na recamera usando Convert audio online. O formato padrão do player é: taxa de bits de 16 bits; A taxa de amostragem é 16.000

Wi-Fi
A versão 2002w da reCamera possui o módulo Wi-Fi em hardware. O Wi-Fi é de modo duplo AP+STA, que pode ser usado para configurar a rede do dispositivo ou configurar o dispositivo no modo AP.
O SSID do Wi-Fi em modo AP é: reCamera_+ the last six bits of MAC.
A Senha do Wi-Fi em modo AP é: 12345678.
O ssid e a senha do WiFi_AP podem ser configurados no arquivo /etc/hostapd_2g4.conf no sistema da recamera.

O arquivo de configuração STA da reCamera está em /etc/wpa_supplicant.conf, onde você configura a conta e a senha do Wi-Fi ao qual deseja se conectar. No modo STA, conecte-se ao Wi-Fi na banda 5G.

No terminal, você pode escanear e conectar-se ao Wi-Fi com o seguinte comando:
wpa_cli -i wlan0 scan #Start a scan
wpa_cli -i wlan0 scan_results #Returns wifi scan results
wpa_cli add_network # Adding a new network,Returns a network ID
wpa_cli set_network ID ssid "your_wifi_name" # set network SSID
wpa_cli set_network ID psk "your_wifi_password" # set network passwd
wpa_cli enable_network ID # enable network and connect
wpa_cli status # Checking connection status

Botão
Botão do Usuário
O Botão 10 do Usuário está localizado na placa reCamera Gimbal Board-B401. Se você quiser redefinir o dispositivo, como, por exemplo, ao esquecer o código de acesso do dispositivo, você pode manter o Botão do Usuário pressionado e então conectar o dispositivo à alimentação. Quando a luz vermelha do dispositivo permanecer constantemente acesa em vez de piscar, solte o Botão do Usuário.
Se você quiser restaurar o firmware do seu dispositivo para uma versão específica, visite os version control.
Botão de Reinicialização
O Botão 11 de Reinicialização está localizado na placa reCamera Gimbal Board-B401. Quando o botão é pressionado, o sistema será reiniciado.
Motor
Há um script Gimbal na reCamera Gimbal que pode ser usado para depurar e controlar os motores do Gimbal. Para ver o script do gimbal em ação, execute o seguinte comando:
gimbal --help
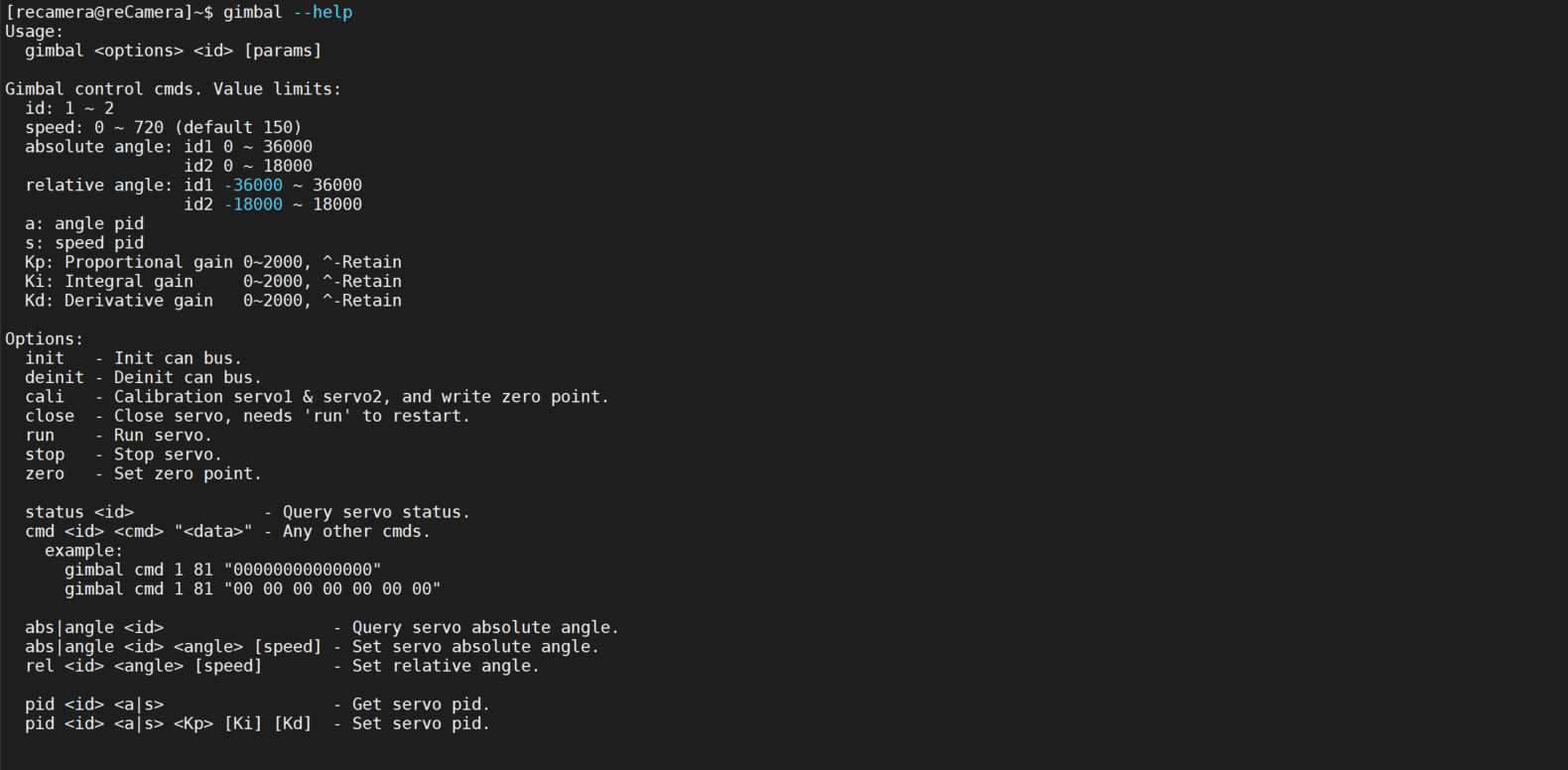
gimbal é um script bash; você pode visualizá-lo e modificá-lo para atender às suas necessidades de desenvolvimento secundário. A localização do script é:
cd /usr/bin
cat gimbal

CAN
Use o comando ifconfig para visualizar a interface can0:

Use o comando cansend can0 can_id#9C.00.00.00.00.00.00.00 para enviar mensagens CAN:

Use o comando candump can0 para receber mensagens CAN:

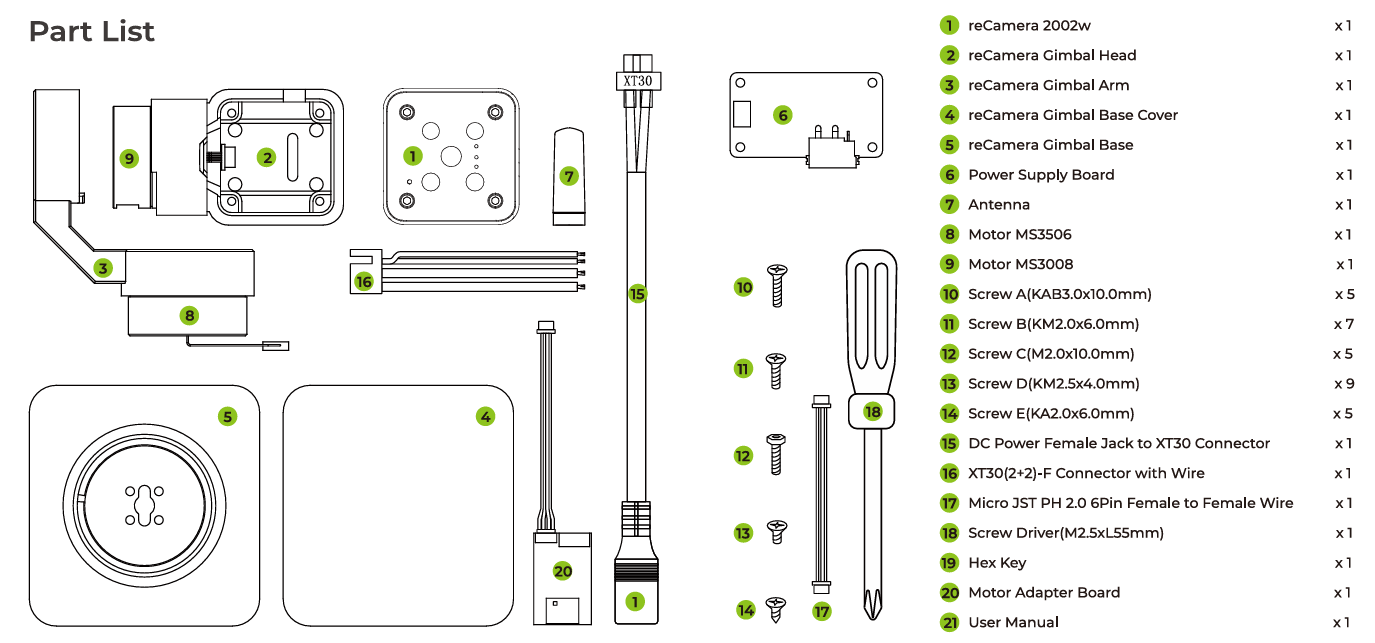
Lista de Peças
Suporte Técnico e Discussão sobre o Produto
Obrigado por escolher nossos produtos! Estamos aqui para lhe fornecer diferentes formas de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.