Introdução ao Node-RED para Gimbal
Este wiki fornece orientações passo a passo sobre como usar nós do Node-RED para operar e controlar os motores do gimbal. O fluxo padrão no Dispositivo é um exemplo mais abrangente de como você pode usar nós de UI com nós do gimbal, mas vamos detalhar os nós um por um para explicar como você pode usá‑los.
Se você é novo em Node-RED ou se tem interesse em aprender como integrar Vision AI com o controle do gimbal, consulte esta página.
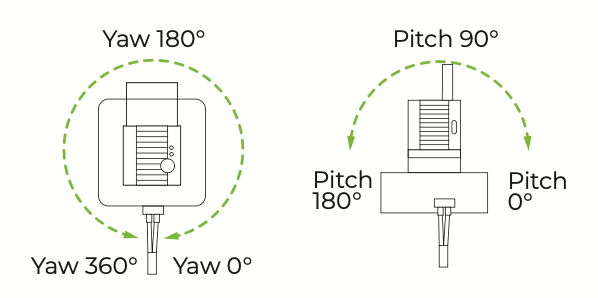
Também fique atento ao alcance dos eixos do Gimbal, conforme mostrado na imagem abaixo:
Nós
Definir ângulo do motor
Este nó permite definir o gimbal para um ângulo específico passando valores de destino para os motores. Quando um ângulo é fornecido, o gimbal se moverá de acordo para realizar o posicionamento desejado.
Exemplo: Usar um nó inject para mover o motor de yaw para 50°

Configuração
- Name: Nome personalizado para o nó.
- Input: analisar livremente o valor do ângulo por msg, variável de flow ou global.
- Unit: Formato do valor de entrada:
- Input em decimal: Os valores de entrada estão em graus decimais (por exemplo, 180.23°)
- Input em inteiro: Os valores de entrada estão em formato inteiro representando centésimos de grau (por exemplo, 18023 = 180.23°)
- Motor Selection: Escolha qual motor controlar e o modo de controle:
-
Eixo de Yaw (Esquerda e Direita): Movimento horizontal
-
Eixo de Pitch (Cima e Baixo): Movimento vertical
-
Posição Absoluta: Define o motor para um ângulo específico
-
Deslocamento Relativo: Move o motor por uma quantidade relativa
-
- Definir eixo duplo ao mesmo tempo: Controla ambos os motores com um único comando
- Posição Absoluta: Define ambos os motores para ângulos específicos
- Deslocamento Relativo: Move ambos os motores por deslocamentos relativos
Entrada
Para controle de eixo único, a entrada é um número que representa o valor do ângulo.
Para controle de dois eixos, a entrada deve ser um objeto JSON com esta estrutura:
{
"yaw_angle": value, // Horizontal angle in degrees
"yaw_speed": speed_value, // Optional: 0-720
"pitch_angle": value, // Vertical angle in degrees
"pitch_speed": speed_value // Optional: 0-720
}
Saída
Este nó não produz mensagens de saída. Ele apenas define o ângulo do motor e atualiza sua exibição de status para refletir o resultado da operação.
Exibição de Status
O nó exibe a operação atual em seu status:
- Processing: Ponto azul com o texto
Processingquando o comando está sendo enviado - Success: Ponto verde com detalhes sobre a operação quando concluída com êxito:
- Exemplo para eixo simples:
Set Yaw: 90°ouOffset Pitch: 10° - Exemplo para dois eixos:
Set Yaw: 90°, Pitch: 45°ouOffset Yaw: 5°, Pitch: 10°
- Exemplo para eixo simples:
- Error: Anel vermelho com mensagem de erro se a configuração falhar
- Busy: Anel amarelo com o texto
Busyse o nó já estiver processando um comando
Definir velocidade do motor
O nó define o valor de velocidade para o motor de yaw (horizontal) ou de pitch (vertical). Esta configuração de velocidade é armazenada no contexto global e usada por outros nós de controle de motor ao enviar comandos de movimento usando SocketCAN.
Exemplo: usar um nó slider para ter um controle deslizante de UI para ajustar a velocidade do motor de Yaw.

O dashboard é feito pelo seguinte fluxo:

Neste exemplo, queremos garantir que definimos o intervalo para 1-720, que é o intervalo de velocidade do motor. Também é necessário garantir qual msg você está analisando para o próximo nó. Aqui escolhemos msg.topic.

Como no nó slider escolhemos msg.topic, precisamos garantir que estamos recebendo de msg.topic para responder com o slider.

Configuração
Você pode especificar de onde obter o valor de entrada:
- msg: Uma propriedade da mensagem de entrada (por exemplo, payload)
- flow: Uma variável de contexto do fluxo
- global: Uma variável de contexto global
Seleção do Motor:
- Eixo de Yaw (Esquerda e Direita): Define a velocidade para o motor de movimento horizontal
- Eixo de Pitch (Cima e Baixo): Define a velocidade para o motor de movimento vertical
Entrada
A entrada deve ser um valor numérico que represente a velocidade desejada do motor. O valor padrão da velocidade é 90 se nenhuma velocidade personalizada tiver sido definida. O valor pode ser fornecido nos seguintes formatos:
- Número: 90
- String contendo um número: "45"
Unidades de Velocidade: O valor de velocidade é medido em dps/LSB (graus por segundo / Least Significant Bit), que é a resolução do controle de velocidade do motor. O intervalo válido é de 0 a 65535, com valores típicos entre 50 e 720 para o gimbal.
Valores de referência de velocidade:
- Movimento lento: 1-120
- Movimento médio: 120-360
- Movimento rápido: 360-720
Saída
Este nó não produz mensagens de saída. Ele apenas atualiza as seguintes variáveis de contexto global:
- Motor de Yaw: can$$currentYawSpeed
- Motor de Pitch: can$$currentPitchSpeed
O valor de velocidade é armazenado em formato hexadecimal (por exemplo, 5A.00 para velocidade 90) no contexto global.
Os nós de controle de motor recuperam esses valores ao enviar comandos pelo barramento CAN.
Exibição de Status
O nó exibe a configuração de velocidade atual em seu status:
-
Ponto verde com
Yaw Speed: XouPitch Speed: Xquando definido com sucesso -
Anel vermelho com mensagem de erro se a configuração falhar. O nó relatará erros nos seguintes casos:
- Valor de entrada inválido (não é um número)
- Valor de entrada vazio
Obter ângulo do motor
O nó obtém a posição atual do motor de yaw (horizontal) ou de pitch (vertical) e fornece o ângulo. Isso é útil para monitorar a orientação atual da câmera ou para implementar lógica baseada em posição nos seus fluxos.
Exemplo: Usando um botão para obter a posição atual do ângulo do motor de yaw

O dashboard é feito pelo seguinte fluxo:
O button UI node irá acionar o get motor angle node, depois analisar o resultado para o text UI node.
Você também pode importar o JSON abaixo em um fluxo vazio para obter este exemplo:
[{"id":"24bca102bda2cc7b","type":"ui-button","z":"4c965edca3cbeb30","group":"e339fda5d481fc57","name":"","label":"Get Angle","order":0,"width":0,"height":0,"emulateClick":false,"tooltip":"","color":"","bgcolor":"","className":"","icon":"","iconPosition":"left","payload":"","payloadType":"str","topic":"topic","topicType":"msg","buttonColor":"","textColor":"","iconColor":"","enableClick":true,"enablePointerdown":false,"pointerdownPayload":"","pointerdownPayloadType":"str","enablePointerup":false,"pointerupPayload":"","pointerupPayloadType":"str","x":180,"y":200,"wires":[["254d3292e774ea35"]]},{"id":"e339fda5d481fc57","type":"ui-group","name":"get angle","page":"d682a21c64a5b02a","width":"6","height":"1","order":1,"showTitle":true,"className":"","visible":"true","disabled":"false","groupType":"default"},{"id":"d682a21c64a5b02a","type":"ui-page","name":"Page 1","ui":"a6b81038728cf4fb","path":"/page1","icon":"home","layout":"grid","theme":"d7858d0ba6eee558","breakpoints":[{"name":"Default","px":0,"cols":3},{"name":"Tablet","px":576,"cols":6},{"name":"Small Desktop","px":768,"cols":9},{"name":"Desktop","px":1024,"cols":12}],"order":1,"className":"","visible":"true","disabled":"false"},{"id":"a6b81038728cf4fb","type":"ui-base","name":"My Dashboard","path":"/dashboard","appIcon":"","includeClientData":true,"acceptsClientConfig":["ui-notification","ui-control"],"showPathInSidebar":false,"headerContent":"page","navigationStyle":"default","titleBarStyle":"default","showReconnectNotification":true,"notificationDisplayTime":1,"showDisconnectNotification":true},{"id":"d7858d0ba6eee558","type":"ui-theme","name":"Default Theme","colors":{"surface":"#ffffff","primary":"#0094CE","bgPage":"#eeeeee","groupBg":"#ffffff","groupOutline":"#cccccc"},"sizes":{"density":"default","pagePadding":"12px","groupGap":"12px","groupBorderRadius":"4px","widgetGap":"12px"}}]
Configuração

Seleção do Motor:
- Eixo de Yaw (Esquerda e Direita): Obtém o ângulo do motor de movimento horizontal
- Eixo de Pitch (Cima e Baixo): Obtém o ângulo do motor de movimento vertical
Unidade:
- Saída em decimal: Fornece o valor do ângulo em graus decimais (por exemplo, 180.23°)
- Saída em inteiro: Fornece o valor do ângulo em formato inteiro representando centésimos de grau (por exemplo, 18023 = 180.23°)
Entrada
Qualquer mensagem de entrada acionará o nó para ler o ângulo atual do motor. O conteúdo da mensagem de entrada não é utilizado.
Saída
O nó fornece o valor do ângulo atual na propriedade msg.payload:
// With "Output in decimal" selected
{
"payload": 90.5
}
// With "Output in integer" selected
{
"payload": 9050
}
Unidades:
- Valor Inteiro Bruto: Unidades do motor (centésimos de grau, 0-36000 para yaw, 0-18000 para pitch)
- Valor decimal convertido: Graus (0° a 360° para yaw, 0° a 180° para pitch)
Exibição de Status
O nó exibe o ângulo atual em seu status:
- Ponto azul com
Readingenquanto consulta o motor - Ponto verde com
Yaw: X°ouPitch: X°quando recuperado com sucesso - Anel amarelo com
Busyse outra consulta já estiver em andamento - Anel vermelho com mensagem de erro se a leitura falhar
- Erro de comunicação com o motor
- Resposta inválida do motor
- Solicitações concorrentes (mostrará o status
Busy)
Obter velocidade do motor
O nó lê o valor de velocidade atual armazenado no contexto global para o motor de guinada (horizontal) ou de inclinação (vertical). Esse valor de velocidade é usado por outros nós de controle de motor ao enviar comandos de movimento usando SocketCAN.
Exemplo: Use um injection node para obter a velocidade do motor e enviar para a janela de depuração

Clicando no nó inject, você verá a velocidade atual do motor de guinada na janela de depuração.
Configuração
- Eixo de Guinada (Esquerda e Direita): Recupera a configuração de velocidade para o motor de movimento horizontal
- Eixo de Inclinação (Cima e Baixo): Recupera a configuração de velocidade para o motor de movimento vertical
- O valor de velocidade é medido em
dps/LSB(graus por segundo / Least Significant Bit), que é a resolução do controle de velocidade do motor. O intervalo válido é de 0 a 65535, com valores típicos entre 50 e 720 para gimbal.
Entrada
Qualquer mensagem de entrada fará com que o nó leia a velocidade atual do motor a partir do contexto global. O conteúdo da mensagem de entrada não é usado.
Saída
O nó gera o valor de velocidade atual na propriedade msg.payload:
{
"payload": 90
}
Exibição de Status
O nó exibe o valor de velocidade atual em seu status:
- Ponto verde com
Speed: Xquando recuperado com sucesso - Anel vermelho com mensagem de erro se a recuperação falhar
Ângulo para CAN
O nó recebe um valor numérico de ângulo como entrada e gera um objeto de mensagem CAN que pode ser enviado diretamente para uma interface de barramento CAN ou para um nó CAN Write.
Exemplo: Use inject nodes para fazer o eixo de guinada girar 30 graus no sentido horário ou anti-horário. O nó angle to CAN converterá o número em comando CAN, e usará CAN Write para executar o comando.

Você pode definir o payload da mensagem no nó inject como abaixo:


e configurar o nó angle to CAN para deslocamento relativo:

Para CAN write, basta adicionar o cliente padrão e selecioná-lo.
Configuração
- Seleção de Motor: Escolha qual motor controlar e o modo de controle:
-
Eixo de Guinada (Esquerda e Direita): Movimento horizontal
-
Eixo de Inclinação (Cima e Baixo): Movimento vertical
-
Posição Absoluta: Define o motor para um ângulo específico
-
Deslocamento Relativo: Move o motor por uma quantidade relativa
-
- Unidade: Formato do valor de entrada:
- Entrada em decimal: Os valores de entrada estão em graus decimais (por exemplo, 180,23°)
- Entrada em inteiro: Os valores de entrada estão em formato inteiro representando centésimos de grau (por exemplo, 18023 = 180,23°)
Entrada
Especifique a fonte do valor do ângulo:
- msg.xxx: Usa o valor em msg
- flow.xxx: Usa um valor do contexto de fluxo
- global.xxx: Usa um valor do contexto global
A entrada deve ser um valor numérico representando o ângulo de destino (para posicionamento absoluto) ou deslocamento de ângulo (para movimento relativo de ângulo).
Exemplos:
90.5 - Mover para 90,5 graus (ao usar graus decimais) 9050 - Mover para 90,5 graus (ao usar unidades do motor) -10 - Mover 10 graus no sentido anti-horário (ao usar deslocamento relativo) 10 - Mover 10 graus no sentido horário (ao usar deslocamento relativo)
Saída
O nó gera um objeto de mensagem CAN que pode ser enviado diretamente a um barramento CAN:

{
"payload": {
"id": 0x141, // Motor ID in hex format (0x141 for Yaw, 0x142 for Pitch)
"data": [0xA4, 0x00, 0x5A, 0x00, 0x10, 0x27, 0x00, 0x00] // Command data as byte array
}
}
Nota: 321 é o formato hexadecimal do motor de guinada (ID 141), 322 é o formato hexadecimal do motor de inclinação (ID 142).
Formato de Comando
A mensagem CAN de saída segue este formato, para mais detalhes, visite o latest motor manual:
Comando de Posição Absoluta
- Byte 0: Tipo de comando (0xA4)
- Byte 1: Direção (0x00)
- Byte 2-3: Velocidade (2 bytes, little-endian)
- Byte 4-7: Ângulo (4 bytes, little-endian)
Comando de Deslocamento Relativo
- Byte 0: Tipo de comando (0xA8)
- Byte 1: Direção (0x00)
- Byte 2-3: Velocidade (2 bytes, little-endian)
- Byte 4-7: Deslocamento (4 bytes, little-endian)
Limites de Ângulo
- Guinada: -180° a +180°
- Inclinação: -90° a +90°
Valores fora desses intervalos serão automaticamente limitados ao intervalo permitido.
Exibição de Status
O nó exibe o ângulo atual em seu status:
- Ponto verde com
command ID+motor ID+move degrees
Can Write
O nó CAN Write permite enviar quadros de comando para dispositivos de barramento CAN e receber seus quadros de resposta. É particularmente útil para consultar o status do dispositivo, enviar comandos de controle e monitorar respostas de dispositivos no barramento CAN.
O exemplo de uso é mostrado acima com o nó angle to CAN.
Configuração
- Name: Nome opcional para o nó
- Client: Selecione a configuração de barramento CAN a ser usada (deve ser configurada em um nó CAN-config)
Entrada
A entrada suporta dois formatos:
Formato 1: Formato de String (Recomendado)
Uma string no formato: ID#DATA onde ID é o identificador CAN em hexadecimal e DATA são bytes hexadecimais separados por ponto.
Exemplo: 141#c1.0a.64.00.00.00.00.00
Formato 2: Formato de Objeto
Um objeto com a seguinte estrutura:
{
"id": "141",
"data": ["A4", "00", "2C", "01", "50", "46", "00", "00"]
}
Onde:
- id: O identificador CAN como string (em hexadecimal sem o prefixo 0x)
- data: Array de bytes de dados em hexadecimal (sem o prefixo 0x)
Saída
O nó gera um objeto com a seguinte estrutura: (Para detalhes de cada comando CAN, visite o latest motor manual)
{
"payload": "141#90.00.AB.02.3C.4C.91.49",
"details": {
"id": "141",
"data": ["90", "00", "AB", "02", "3C", "4C", "91", "49"],
"raw": "90.00.AB.02.3C.4C.91.49"
},
"timestamp": 1632048172456,
"topic": "can-response"
}
Onde:
- payload: String no formato
ID#DATA - details: Objeto contendo informações detalhadas:
- ID: O identificador CAN (igual ao da requisição)
- data: Array de bytes de resposta em hexadecimal
- raw: String dos bytes de resposta separados por ponto
- timestamp: Hora em que a resposta foi recebida
- topic: Definido como "can-response"
Exemplo
Requisição (String de entrada):
141#90.00.00.00.00.00.00.00
Resposta (Saída):
{
"payload": "141#90.00.AB.02.3C.4C.91.49",
"details": {
"id": "141",
"data": ["90", "00", "AB", "02", "3C", "4C", "91", "49"],
"raw": "90.00.AB.02.3C.4C.91.49"
},
"timestamp": 1632048172456,
"topic": "can-response"
}
Tratamento de Resposta
O nó aguarda uma resposta do dispositivo CAN e filtra automaticamente os quadros de resposta para garantir que você receba a resposta relevante para o seu comando específico.
Timeout
Se nenhuma resposta for recebida dentro do período de timeout configurado, o nó irá gerar uma mensagem de erro.
Tratamento de Erros
O nó reportará erros nos seguintes casos:
- Formato de entrada inválido
- Erro de comunicação no barramento CAN
- Timeout de resposta
CAN para Ângulo
O nó recebe um objeto de mensagem CAN como entrada e extrai o ID do motor, o tipo de comando e o valor de ângulo/deslocamento. Ele suporta comandos de posição absoluta (A4), comandos de deslocamento relativo (A8) e comandos de consulta de status (94).

Configuração
O campo Input permite que você especifique a propriedade da mensagem, o contexto de fluxo ou a variável de contexto global que contém o objeto de mensagem CAN. Por padrão, ele usa msg.payload.
Entrada
A entrada deve ser um objeto de mensagem CAN com a seguinte estrutura:
{
"id": 0x141, // Motor ID in hex format (0x141 for Yaw, 0x142 for Pitch)
"data": [...] // Byte array containing the command data (8 bytes)
}
Exemplo:
{
"id": 0x141,
"data": [0xA4, 0x00, 0x5A, 0x00, 0x10, 0x27, 0x00, 0x00]
}
Validação de Comando
O nó inclui validação avançada para garantir que apenas comandos de dados significativos sejam processados:
- Comandos 94: NÃO devem ter todos os bytes restantes como zero (o que indicaria uma consulta, não uma resposta)
- Comandos A4/A6: O segundo byte deve ser 0x00 ou 0x01 para ser considerado válido (exclui respostas ACK como 0x2F)
- Comandos A8: O segundo byte deve ser 0x00 para ser considerado válido
Essas regras de validação evitam o processamento de respostas ACK e comandos de consulta que resultariam em cálculos de ângulo incorretos.
Unidade
- Saída em decimal: Gera valores de ângulo em graus decimais (por exemplo, 180,23°)
- Saída em inteiro: Gera valores de ângulo em formato inteiro representando centésimos de grau (por exemplo, 18023 = 180,23°)
Saída
O nó gera um objeto JSON com as informações decodificadas:
Para comandos de posição absoluta (A4) com "Saída em decimal" selecionado:
{
"payload": {
"motorId": 0x141,
"angle": 90.5
}
}
Para comandos de posição absoluta (A4) com "Saída em inteiro" selecionado:
{
"payload": {
"motorId": 0x141,
"angle": 9050
}
}
Para comandos de deslocamento relativo (A8) com "Saída em decimal" selecionado:
{
"payload": {
"motorId": 0x142,
"offset": 5.0
}
}
Para comandos de consulta de status (94) com "Output in decimal" selecionado:
{
"payload": {
"motorId": 0x141,
"status": true,
"angle": 90.5
}
}
IDs dos motores
- Motor de yaw (horizontal):
0x141 - Motor de pitch (vertical):
0x142
Tipos de comando
0xA4: comando de posição absoluta0xA8: comando de deslocamento relativo0x94: comando de consulta de status
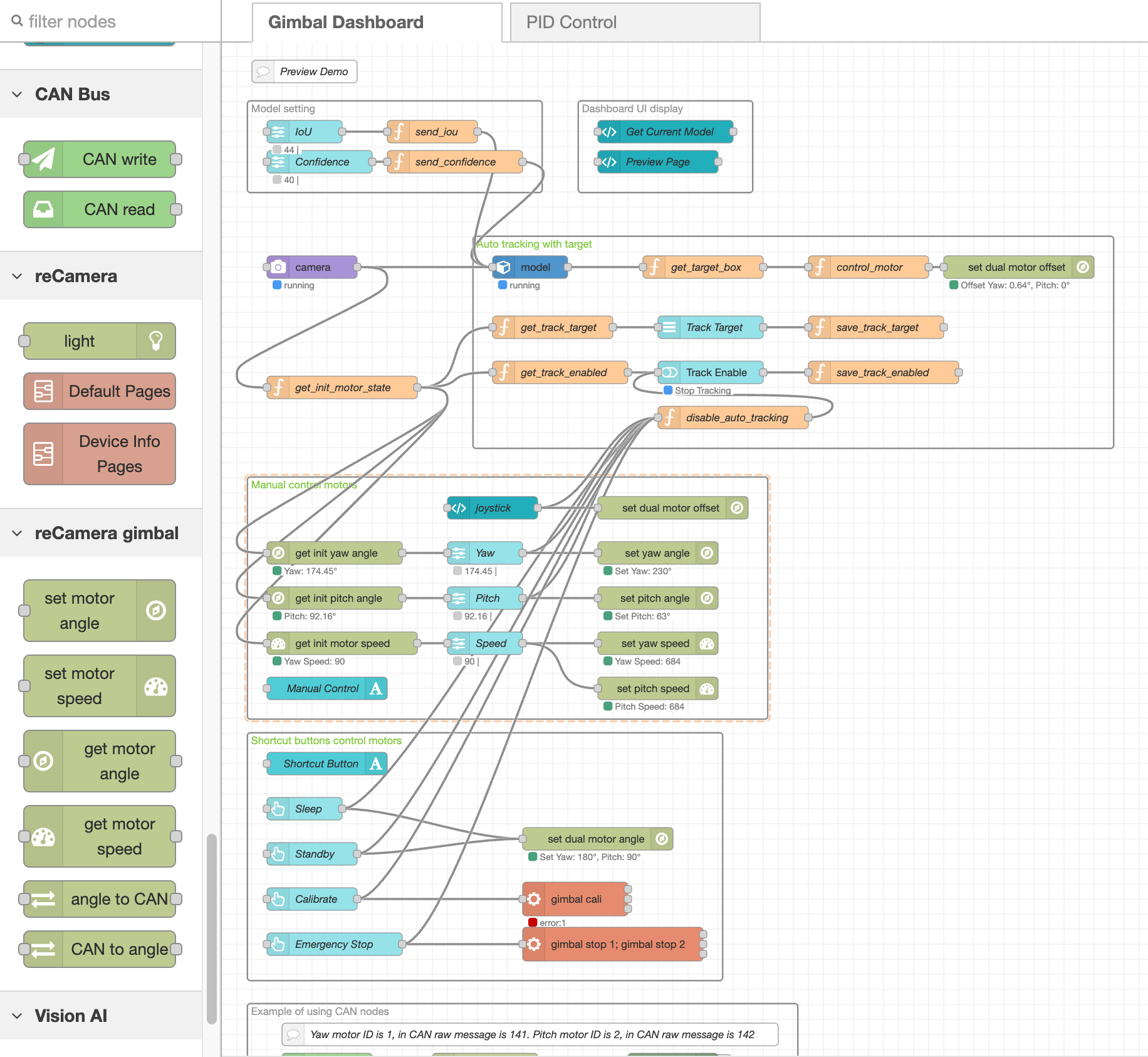
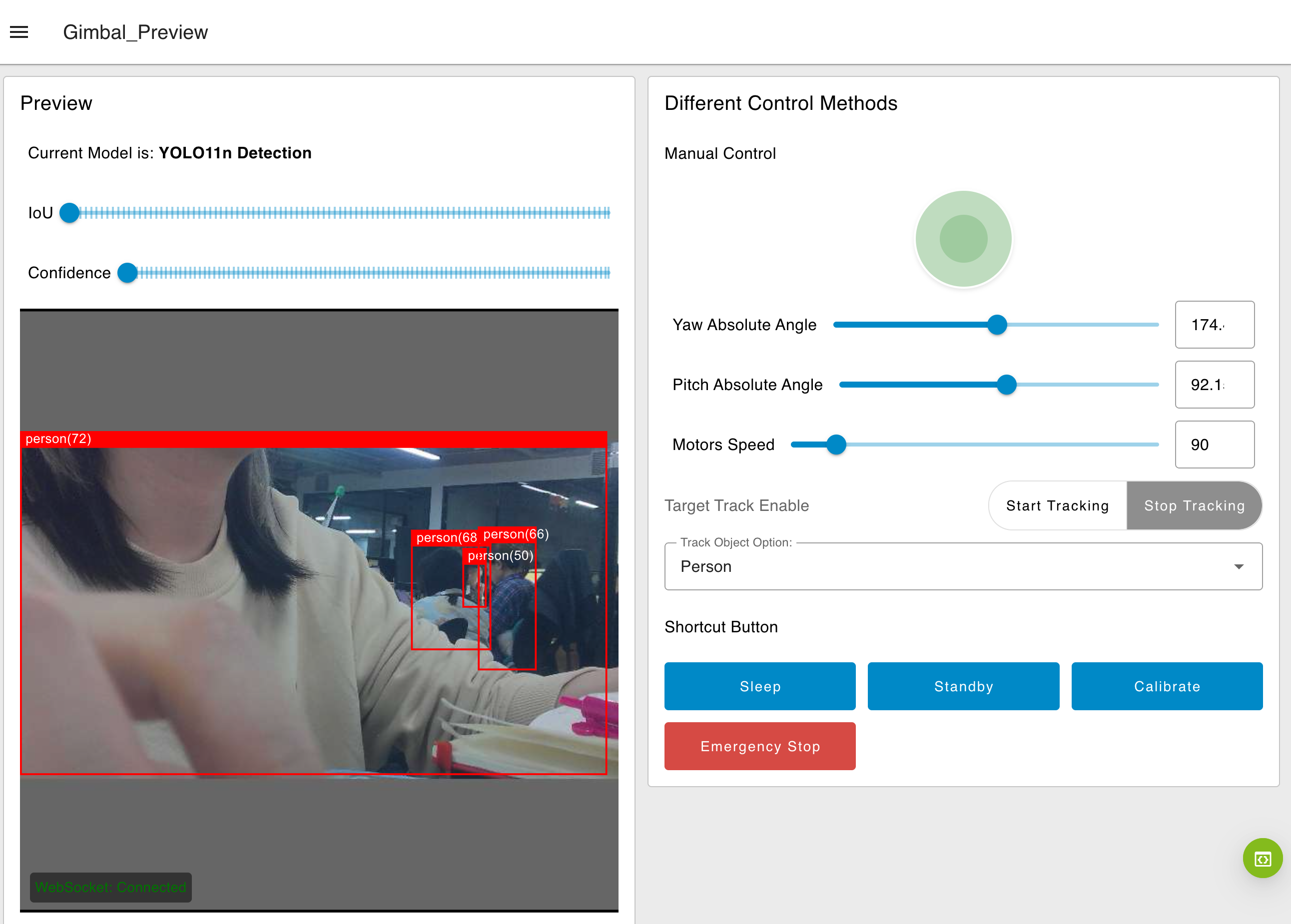
Explicação do fluxo padrão
O fluxo padrão é um exemplo de como você pode usar o palette de UI do dashboard, o palette de visão de IA e o palette da reCamera para formar um dashboard que pode pré-visualizar a câmera, rastrear objetos específicos e controlar motores. O dashboard se parece com isto:
Nós iremos detalhar cada função individual para ajudar você a entender melhor este fluxo.
Rastreamento automático
Esta seção do fluxo lida com a funcionalidade de rastreamento automático.
-
Model Node: executa o modelo YOLO e gera resultados de detecção como x, y, w, h, ID do objeto da caixa de detecção. -
Function get_target_box Node: o nó de função extrai apenas as informações das bounding boxes para o objeto desejado. O algoritmo seleciona a maior bounding box, tipicamente o alvo mais próximo ou mais relevante para rastrear. -
Function control_motor Node: calcula o deslocamento entre o centro desta bounding box e o centro do frame da câmera. -
Set motor offset Node: recebe o valor de deslocamento e então interpreta o comando CAN para os motores para manter o alvo centralizado no frame. -
Function get_track_target Node: faz a correspondência entre o ID do objeto no algoritmo Yolo e o nome real do objeto e atualiza a variável globaltrackTarget. -
Dropdown List UI Node:fornece a UI de lista suspensa no dashboard. Os usuários podem selecionar o TrackTarget em tempo real. -
Function save_track_target Node: atualiza o TrackTarget a partir da interação com a lista suspensa. -
Function get_track_enable Node: obtém o status da variável globaltrackEnabled. -
Track Enable Button Group Node: fornece o botão de alternância na UI do dashboard para os usuários habilitarem ou desabilitarem o rastreamento automático. -
Function save_track_enabled Node: atualiza se a variável globaltrackEnabledestá habilitada ou não.
Controle manual
O fluxo de controle manual permite que os usuários movam os motores do gimbal interagindo com sliders de UI.

-
Joystick Node: usou o nó de UI de template para desenhar um joystick de interação, que irá analisar os dados de movimento para o próximo nó. -
Set dual motor anle Node: selecione a configuração set dual axis at the same time. Usa o JSON analisado a partir do Joystick para controlar o movimento do motor ao mesmo tempo. Observe que isto controla o movimento da imagem em vez da orientação real do gimbal físico. -
Get motor angle Node: recupera as posições iniciais dos motores de yaw e pitch quando o dispositivo é ligado e sincroniza com o nó de slider da UI.
-Get motor speed Node: recupera a velocidade inicial do motor de yaw quando o dispositivo é ligado e sincroniza com o nó de slider da UI.
-
Slider UI Node: fornece um slider de UI no dashboard para o usuário interagir com os motores. Observe que usamos apenas um slider de velocidade aqui para controlar a velocidade de ambos os motores ao mesmo tempo. Você pode usar 2 nós para atribuir velocidades diferentes para dois motores. -
Set motor angle Node: recebe dados do nó de slider da UI e interpreta o comando CAN para executar o motor até uma determinada posição. -
Set motor speed Node: recebe dados do nó de slider da UI e atualiza a variável global para a velocidade do motor para estar pronta para ser enviada com um comando de posição.
Botões de atalho

Button UI Node: fornece botões de UI no dashboard para o usuário interagir com o gimbal. Ao clicar, o nó enviará o valor atribuído:-
Sleep:
{"yaw_angle":180, "yaw_speed":360, "pitch_angle":175, "pitch_speed":360} -
Standby:
{"yaw_angle":180, "yaw_speed":360,"pitch_angle":90, "pitch_speed":360} -
Calibrate: aciona o nó exec
-
Emergency Stop: aciona o nó exec
-
Ao clicar nesses botões, o trackEnabled também será atualizado para desabilitado para parar o rastreamento automático (se ele estiver ligado).
Exec Node: executa um comando de sistema e retorna sua saída. Você pode executar qualquer script bash para o gimbal com este nó:-
Calibrate:
gimbal cali -
Emergency Stop:
gimbal stop 1; gimbal stop 2Você pode ver todos os scripts disponíveis se digitar
gimbalno terminal.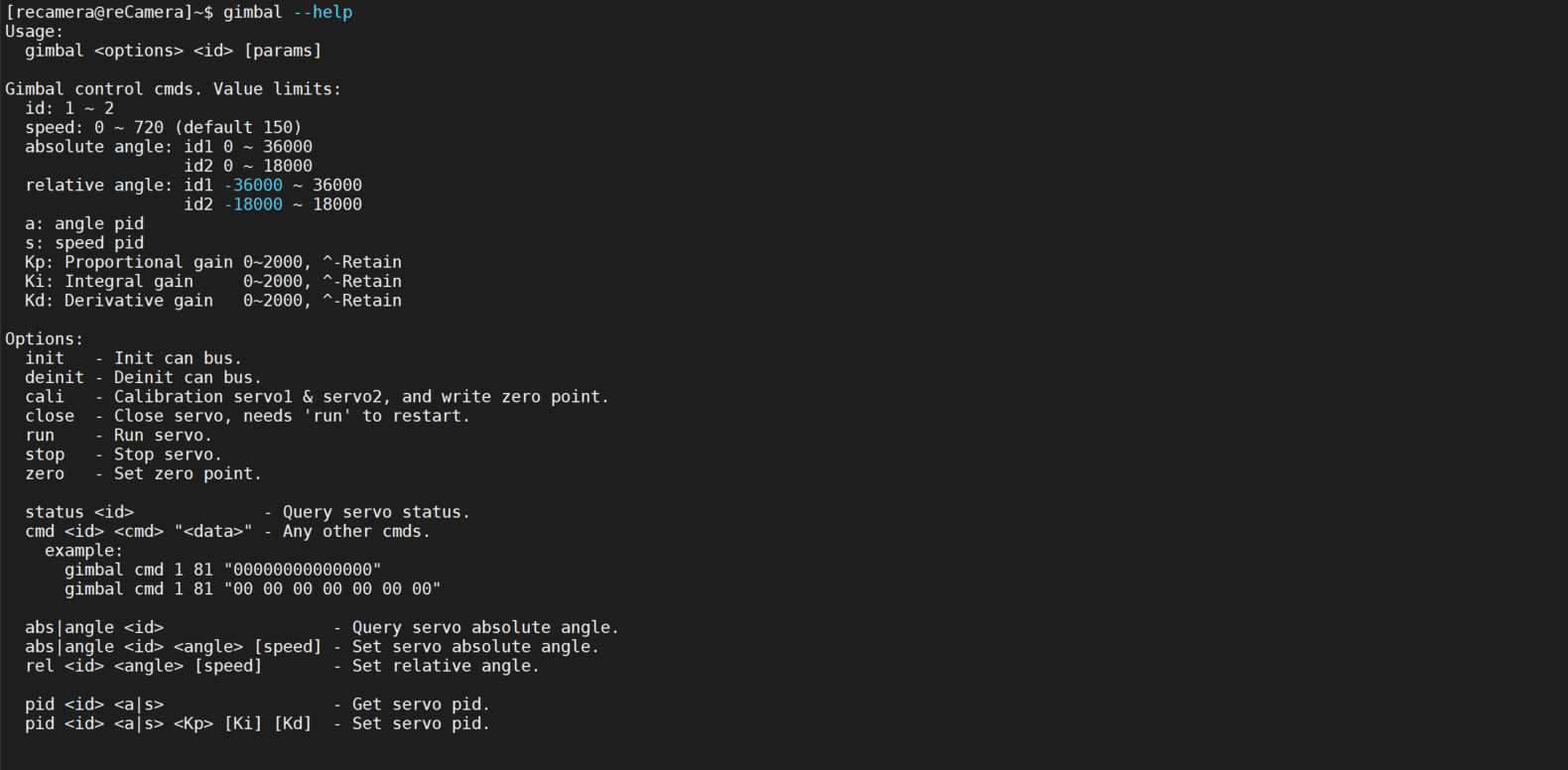
-
Nós CAN
Este exemplo não é mostrado no dashboard, pois não possui nenhum nó de UI. É um exemplo no workspace para demonstrar como usar os seguintes nós.

-
CAN read Node: escuta continuamente mensagens CAN na interface configurada e as gera em um formato padronizado. -
CAN to angle: decodifica e converte os dados brutos lidos do CANbus para valores angulares. -
Inject Node: interpreta30graus para o nóangle to CANpara mover o motor. -
angle to CAN: recebe um valor de ângulo numérico (30 neste caso) como entrada e gera um objeto de mensagem CAN que pode ser enviado diretamente para uma interface de barramento CAN ou para um nó CAN Write. -
CAN Write: envia quadros de comando para dispositivos de barramento CAN e recebe seus quadros de resposta. Neste caso ele irá interpretar"payload": {
"id": 0x141, // Motor ID in hex format (0x141 for Yaw, 0x142 for Pitch)
"data": [0xA8, 0x00, 0x5A, 0x00, 0xb8, 0xb, 0x00, 0x00] // Command data as byte array
}para o comando CAN para girar 30 graus no sentido anti-horário.
Controle PID
Por favor, veja o documento aqui sobre nós PID.
Suporte Técnico e Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.