Configurar reComputer Industrial R22xx
Visão geral
Aprenda como configurar e testar componentes de hardware na série reComputer Industrial R22xx após instalar os dispositivos. Este wiki abrange mapeamento de GPIO, teste do LED USER, comunicação SPI, varredura de Wi‑Fi e Bluetooth, LoRa®, 4G, 5G, Zigbee via Mini‑PCIe, RS485, RS232, CAN, teste de DI/DO, UPS para desligamento seguro e mais.

Consultar mapeamentos e offsets de GPIO
Para consultar mapeamentos e offsets de GPIO, siga estas etapas:
- Copie e cole o seguinte comando para consultar os mapeamentos de GPIO:
cat /sys/kernel/debug/gpio
Este comando exibirá os mapeamentos e offsets de GPIO, fornecendo informações essenciais para depurar ou configurar os pinos GPIO.
Teste do LED USER
Fornecemos LEDs em três cores — vermelho, azul e verde — para uso dos usuários. Você pode entrar no diretório /sys/class/leds/ para visualizar:
1. Navegue até o diretório do LED
cd /sys/class/leds/
ls

Use o seguinte comando para acender o LED da cor correspondente.
sudo su
echo 1 > /sys/class/leds/led-red//brightness
echo 1 > /sys/class/leds/led-blue/brightness
echo 1 > /sys/class/leds/led-green/brightness
Isso acenderá o LED correspondente.
3. Desligar LEDs (opcional)
Para desligar um LED específico, use:
sudo su
echo 0 > /sys/class/leds/led-red/brightness
echo 0 > /sys/class/leds/led-blue/brightness
echo 0 > /sys/class/leds/led-green/brightness
Testando a comunicação SPI
Para testar a comunicação SPI curto‑circuitando os pinos MISO e MOSI do módulo TPM, siga estas etapas:
- Clone o repositório spidev-test:
# Don't forget to connect to network before running command
git clone https://github.com/rm-hull/spidev-test.git
- Acesse o diretório spidev-test:
cd spidev-test
- Compile o arquivo spidev_test.c:
gcc spidev_test.c -o spidev_test
- Execute o programa spidev_test com o seguinte comando:
./spidev_test -D /dev/spidev10.0 -v -p hello
Este comando testa a comunicação SPI no dispositivo SPI especificado (/dev/spidev10.0) com saída detalhada (-v) e envia a mensagem "hello" (-p hello). Ao curto‑circuitar os pinos MISO e MOSI do módulo TPM, você está efetivamente criando um cenário de loopback, em que os dados enviados em MOSI são recebidos em MISO. Essa configuração permite testar a comunicação SPI sem um dispositivo real conectado.
Varredura de Wi‑Fi
Para listar as redes Wi‑Fi disponíveis e seus detalhes, execute:
sudo iwlist wlan0 scan
- Este comando faz a varredura de todas as redes Wi‑Fi próximas e exibe seus SSIDs, intensidade de sinal e tipo de criptografia.
Varredura de Bluetooth
Para procurar dispositivos Bluetooth, siga estas etapas:
Abra a interface de controle do Bluetooth:
sudo bluetoothctl
Este comando abrirá a interface de controle do Bluetooth. A partir daí, você pode executar comandos adicionais para procurar dispositivos Bluetooth próximos.
Habilite a varredura:
scan on
Este comando iniciará a varredura de dispositivos Bluetooth próximos. Você pode então usar outros comandos dentro da interface bluetoothctl para interagir com dispositivos Bluetooth, como parear ou conectar‑se a eles.
LoRa® via Mini‑PCIe
Configuração LoRa® SPI
Após instalar o LoRa® SPI no slot Mini‑PCIe 2, é possível configurar o LoRa® SPI seguindo estas etapas:
- Clone o repositório SX1302_HAL:
cd ~/
git clone https://github.com/Lora-net/sx1302_hal
- Acesse o diretório clonado:
cd sx1302_hal
- Modifique o arquivo de configuração:
Abra o arquivo de configuração do dispositivo I2C:
sudo nano ./libloragw/inc/loragw_i2c.h
Altere esta linha:
#define I2C_DEVICE "/dev/i2c-1"
Para:
#define I2C_DEVICE "/dev/i2c-2"
Altere #define I2C_DEVICE "/dev/i2c-1" para #define I2C_DEVICE "/dev/i2c-2". Pressione ctrl+x para sair, pressione y para salvar as alterações e, em seguida, pressione Enter para voltar à linha de comando.
- Adicione o arquivo packet_forwarder/reset_lgw.sh:
sudo nano packet_forwarder/reset_lgw.sh
Adicione o código de execução:
SX1302_RESET_PIN=632 # SX1302 reset
SX1302_POWER_EN_PIN=633 # SX1302 power enable
SX1261_RESET_PIN=634 # SX1261 reset (LBT / Spectral Scan)
# AD5338R_RESET_PIN=13 # AD5338R reset (full-duplex CN490 reference design)
O firmware oferece suporte nativo ao modelo SPI WM1302-SPI-US915-M. Se você quiser usar outros modelos, pode consultar a definição do RESET_PIN correspondente e modificá‑lo seguindo os comandos abaixo.
cat /sys/kernel/debug/gpio
Pressione ctrl+x para sair, pressione y para salvar as alterações e, em seguida, pressione Enter para voltar à linha de comando.
- Modifique o código de configuração:
cp ./tools/reset_lgw.sh ./packet_forwarder
- Comente as linhas 18, 29, 35, 42, 53 e 54, respectivamente:
nano ./packet_forwarder/global_conf.json.sx1250.US915
Altere "com_path": "/dev/spidev0.0" para "com_path": "/dev/spidev2.0".
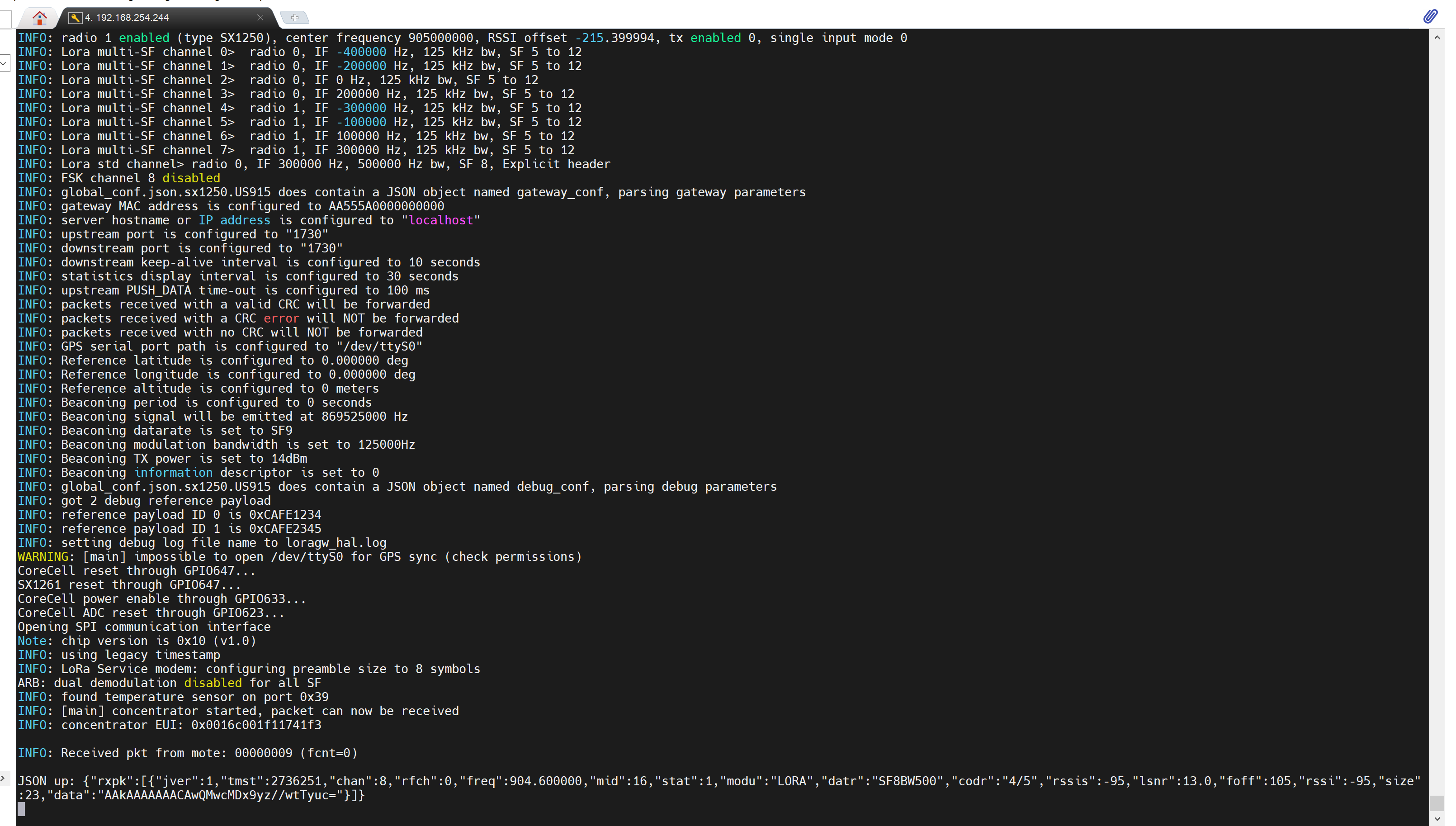
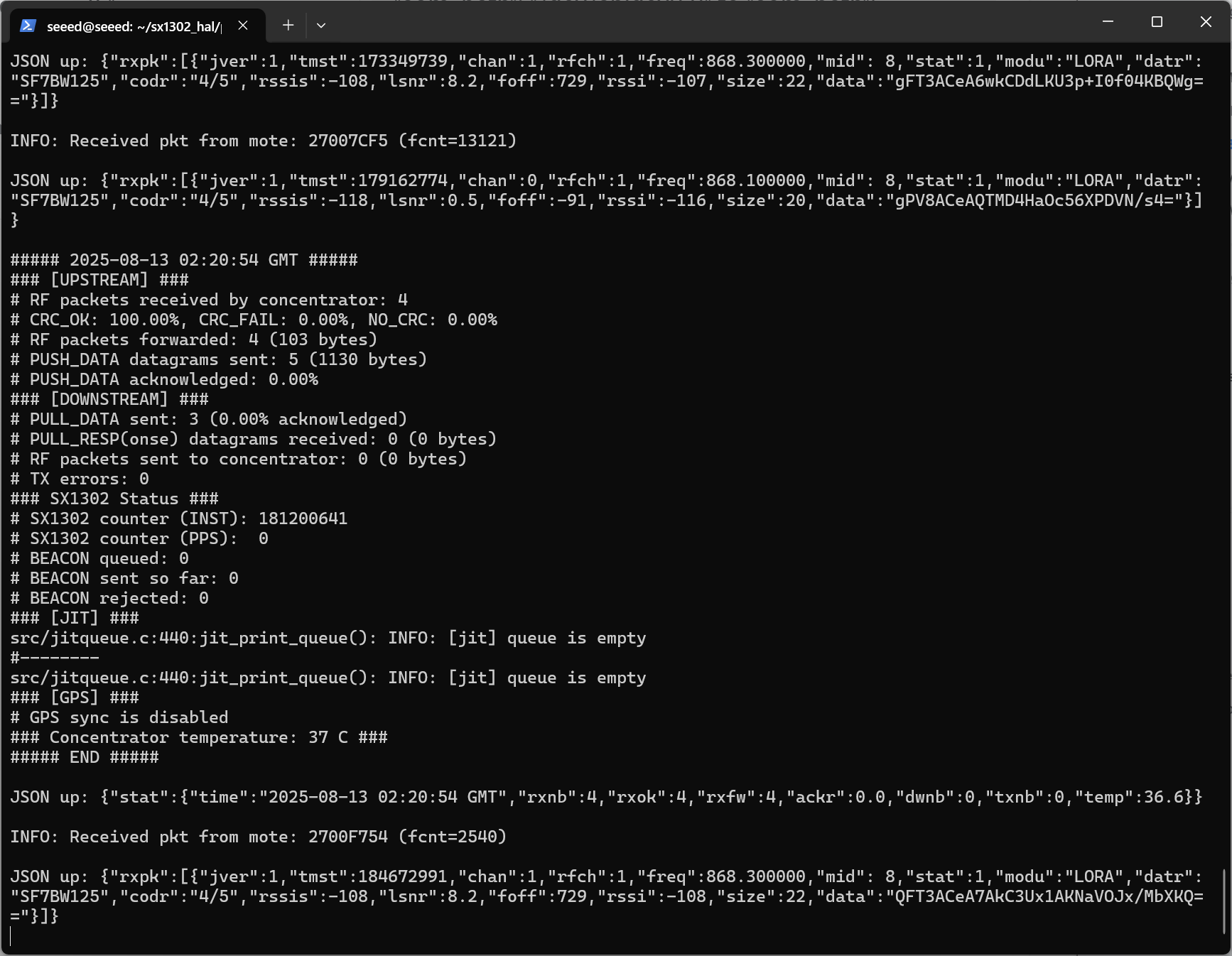
cd ./packet_forwarder
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.US915
Configuração LoRa® USB
Para LoRa® USB, os comandos anteriores permanecem os mesmos do LoRa® SPI. No entanto, o comando final precisa ser alterado para:
cho 632 > /sys/class/gpio/export
echo "out" > /sys/class/gpio/gpio632/direction
echo "1" > /sys/class/gpio/gpio632/value
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
Este comando especifica o arquivo de configuração a ser usado para LoRa® USB.
5G celular via M.2 B‑KEY
Para interagir com um módulo 5G/4G usando comandos AT via minicom, siga estas etapas:
- Crie um novo arquivo power_5g.sh:
nano power_5g.sh
Abra com sudo nano e insira o seguinte comando, depois pressione ctrl+x para salvar e sair.
#!/bin/bash
RESET_PIN=655
POWER_PIN=660
if [ ! -d "/sys/class/gpio/gpio$RESET_PIN" ]; then
echo $RESET_PIN > /sys/class/gpio/export
fi
if [ ! -d "/sys/class/gpio/gpio$POWER_PIN" ]; then
echo $POWER_PIN > /sys/class/gpio/export
fi
echo "out" > /sys/class/gpio/gpio$RESET_PIN/direction
echo "out" > /sys/class/gpio/gpio$POWER_PIN/direction
echo 1 > /sys/class/gpio/gpio$RESET_PIN/value
echo 1 > /sys/class/gpio/gpio$POWER_PIN/value
echo "Start to reboot 5g module"
echo 0 > /sys/class/gpio/gpio$RESET_PIN/value
sleep 0.05
echo 0 > /sys/class/gpio/gpio$POWER_PIN/value
echo "5g module reboot completed"
- Execute o arquivo:
sudo ./power_5g.sh
Após 10–15 segundos (leva algum tempo para o módulo ligar e enumerar o USB), verifique se o nó de dispositivo aparece:
ls /dev/ttyUSB*
Saída /dev/ttyUSB0, etc.:

Abra o minicom com a porta serial e taxa de baud apropriadas:
sudo apt update
sudo apt install minicom
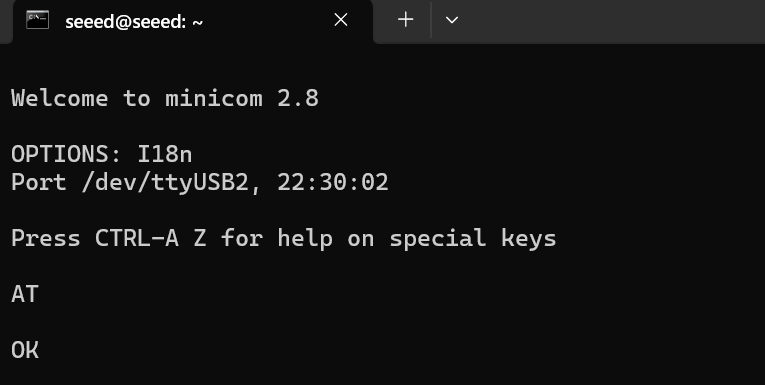
sudo minicom -D /dev/ttyUSB2 -b 115200
Este comando abre o minicom com a porta serial especificada (/dev/ttyUSB2) a uma taxa de baud de 115200.
- Quando o minicom estiver aberto, você poderá começar a enviar comandos AT para o módulo 4G. Por exemplo:
AT
Este comando verifica se o módulo está respondendo. Você deverá receber uma resposta "OK" se o módulo estiver funcionando corretamente.
- Para discar um número de telefone usando o módulo 4G, você pode usar o comando ATD seguido do número de telefone:
ATD<phone_number>;
Substitua phone_number pelo número de telefone desejado para discagem. Certifique‑se de incluir um ponto e vírgula ; no final do comando para indicar o fim do número de telefone.
4G celular via Mini‑PCIe
Crie um novo arquivo power_4g.sh:
sudo nano power_4g.sh
Abra com sudo nano e insira o seguinte comando, depois pressione ctrl+x para salvar e sair.
# SIM_MUX_SEL
echo 655 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio655/direction
echo 0 > /sys/class/gpio/gpio655/value
echo 660 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio660/direction
echo 1 > /sys/class/gpio/gpio660/value
Execute o arquivo:
sudo ./power_4g.sh
Entre no minicom para enviar comandos:
sudo apt install minicom -y
sudo minicom -D /dev/ttyUSB2 -b 115200
Pressione Ctrl+A, Z, E em sequência. Primeiro envie AT para testar se está conectado. Se aparecer OK, a conexão foi bem‑sucedida.
Após executar o comando a seguir, o módulo será reiniciado automaticamente. Se você não sair do minicom, poderá ver as informações de configuração correspondentes. Acesso à Internet por discagem ECM:
AT+QCFG="usbnet",1
Quando a última linha mostrar OK, terá sido bem‑sucedido.
Note O dispositivo precisa aguardar por um tempo e, em seguida, você poderá visualizar o endereço IP de usb0 em ifconfig.
Teste o status da rede e a comunicação:
# Check network status
ifconfig
# Test communication
ping www.baidu.com -I usb0
Zigbee via Mini-PCIe
Para testar a comunicação Zigbee entre dois módulos Zigbee, siga estas etapas:
- Verificar portas seriais disponíveis
Use o seguinte comando para verificar as portas seriais disponíveis:
cat /dev/ttyUSB*
Instalar uma ferramenta de comunicação serial
- Instale a ferramenta de comunicação serial:
sudo apt-get install cutecom
- Abrir porta serial para o Coordenador (primeiro módulo Zigbee):
- Abra a ferramenta cutecom e configure-a para a primeira porta serial:
- Taxa de baud: 115200
- Marque a opção "Hex output" na parte inferior da interface.
- Siga estas etapas para configurar o primeiro módulo Zigbee:
- Definir como coordenador: Envie o comando ‘55 04 00 05 00 05’, espere a resposta ‘55 04 00 05 00 05’.
- Reiniciar dispositivo: Pressione o botão de reset ou envie o comando ‘55 07 00 04 00 FF FF 00 04’.
- Formação de rede: Envie o comando ‘55 03 00 02 02’.
- Abrir porta serial para o Roteador (segundo módulo Zigbee): Abra outra instância do cutecom e configure-a para a segunda porta serial com as mesmas configurações de antes. Siga estas etapas para configurar o segundo módulo Zigbee:
- Definir como roteador: Envie o comando ‘55 04 00 05 01 04’, espere a resposta ‘55 04 00 05 00 05’.
- Reiniciar dispositivo: Pressione o botão de reset ou envie o comando ‘55 07 00 04 00 FF FF 00 04’.
- Formação de rede: Envie o comando ‘55 03 00 02 02’.
- Verificar status do dispositivo: Envie o comando ‘55 03 00 00 00’ para verificar o status do dispositivo. Espere uma resposta semelhante a ‘55 2a 00 00 00 01 XX XX XX XX’, onde ‘XX’ representa informações do dispositivo.
- Entrar no modo transparente: Se a formação da rede for bem-sucedida, entre no modo transparente enviando o comando 55 07 00 11 00 03 00 01 13. Ambos os módulos devem estar em modo transparente para comunicação direta. Para sair do modo transparente, envie "+++".
- Observações adicionais:
- Se a configuração do roteador falhar, o dispositivo pode já ser um coordenador. Saia da rede usando o comando '55 07 00 04 02 xx xx xx'.
- Teste a potência de transmissão usando os comandos '55 04 0D 00 00 0D' (consulta) e '55 04 0D 01 XX XX' (configuração). Certifique-se de substituir /dev/ttyUSB pela porta serial correta para cada módulo Zigbee. Siga cuidadosamente estas etapas para testar com sucesso a comunicação Zigbee entre os dois módulos.
Teste de RS485
O reComputer Industrial R21xx inclui 2x portas RS485. Abaixo estão suas correspondentes portas COM e arquivos de dispositivo:
| Número de portas RS485 | Porta COM | Rótulo de serigrafia | Arquivo de dispositivo |
|---|---|---|---|
| RS485-2 | COM2 | A2/B2/GND3 | /dev/ttyACM1 |
| RS485-3 | COM3 | A3/B3/GND4 | /dev/ttyACM2 |
Para testar a função RS485, você pode seguir as etapas abaixo (tomando RS485_1 e RS485_2 como exemplos):
- Conecte os sinais A e B de RS485_1 e RS485_2.
- Abra o minicom em duas janelas de terminal, respectivamente:
sudo minicom -D /dev/ttyACM1
sudo minicom -D /dev/ttyACM2
Se houver uma placa de expansão, o número precisa ser deslocado uma posição para trás, por exemplo /dev/ttyAcM2, /dev/ttyAcM3.
- As seguintes operações precisam ser executadas em ambos os ACMs abertos:
-
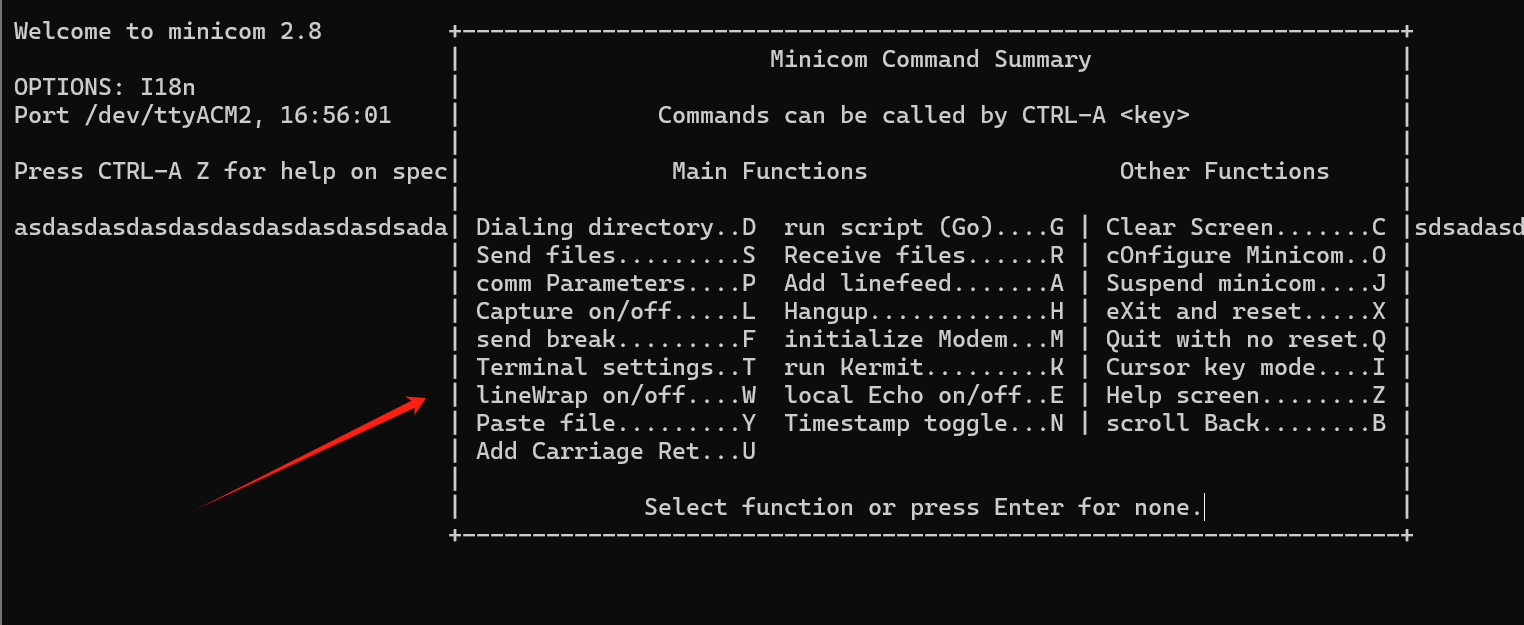
Pressione Ctrl+A, depois pressione Z, e a interface Minicom Command Summary aparecerá:
-
Pressione O novamente para abrir a configuração, selecione Serial port setup e pressione Enter; Abra todas as interfaces relacionadas a RS485, pressione H/I/J/K/L em sequência para abrir;
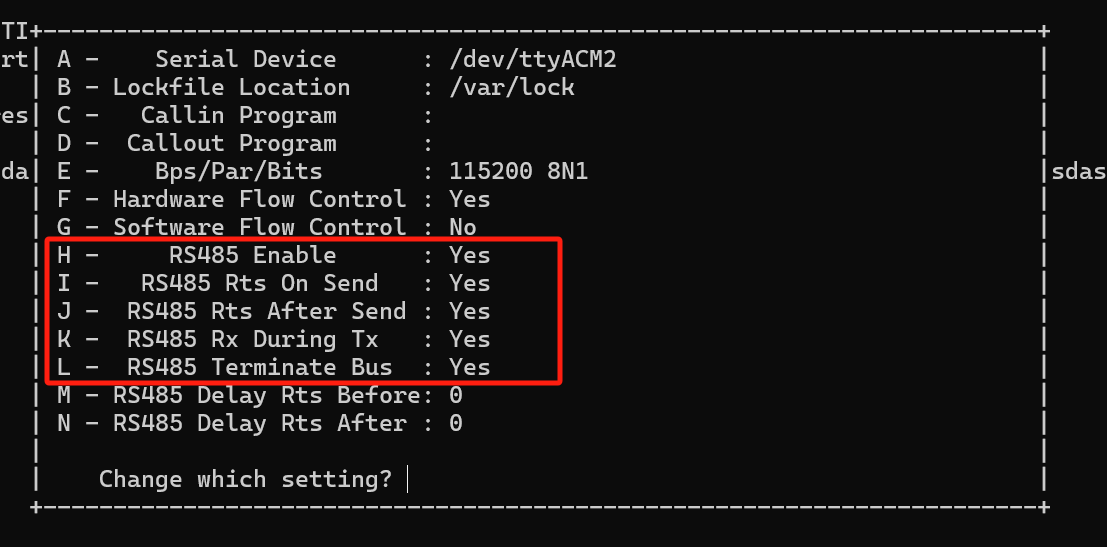
-
Depois que todos os "YES" forem exibidos, pressione Enter para voltar e, em seguida, selecione Exit para sair.
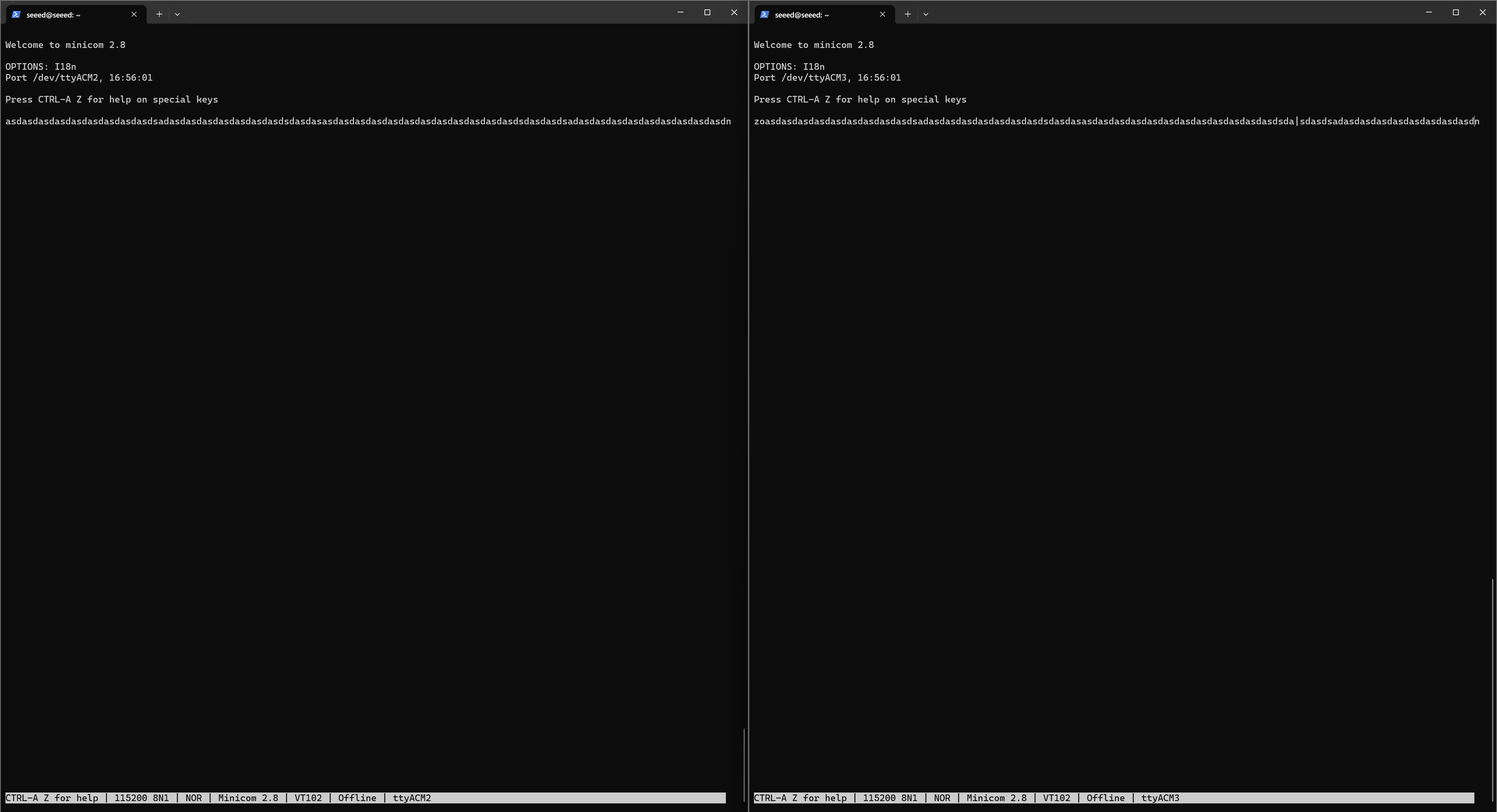
Tomando ACM2 e ACM3 como exemplo: Se você quiser enviar de ACM2 para ACM3, ACM2 precisa ser configurado novamente: ctrl+A, depois pressione Z e depois E, e então inicie o comando de escrita da porta serial. Neste momento, você pode imprimir strings em ACM2 à vontade, e poderá ver o conteúdo de ACM2 em ACM3 ao mesmo tempo; Por outro lado, se você quiser enviar de ACM3 para ACM2, ACM3 precisa ser configurado novamente: ctrl+A, depois pressione Z e depois E, e então inicie o comando de escrita da porta serial. Neste momento, você pode imprimir strings em ACM3 à vontade, e poderá ver o conteúdo de ACM3 em ACM2 ao mesmo tempo. Como mostrado na figura.
Teste de RS232
O reComputer Industrial R21xx inclui 2x portas RS232, e as correspondentes portas COM e arquivos de dispositivo são os seguintes:
| Número de portas RS232 | Porta COM | Rótulo de serigrafia | Arquivo de dispositivo |
|---|---|---|---|
| RS232-1 | COM1 | RX1/TX1/GND1 | /dev/ttyACM0 |
| RS232-2 | COM2 | RX2/TX2/GND2 | /dev/ttyACM1 |
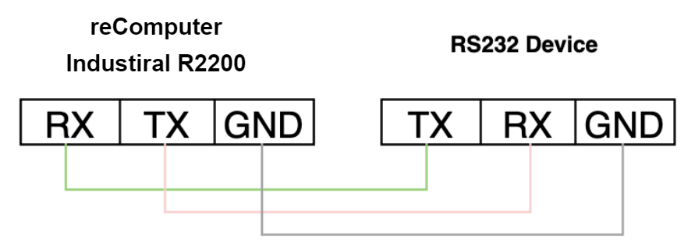
Como o RS232 é comunicação full-duplex, faça um curto-circuito diretamente entre TX e RX do RS232 para realizar um teste de loopback.
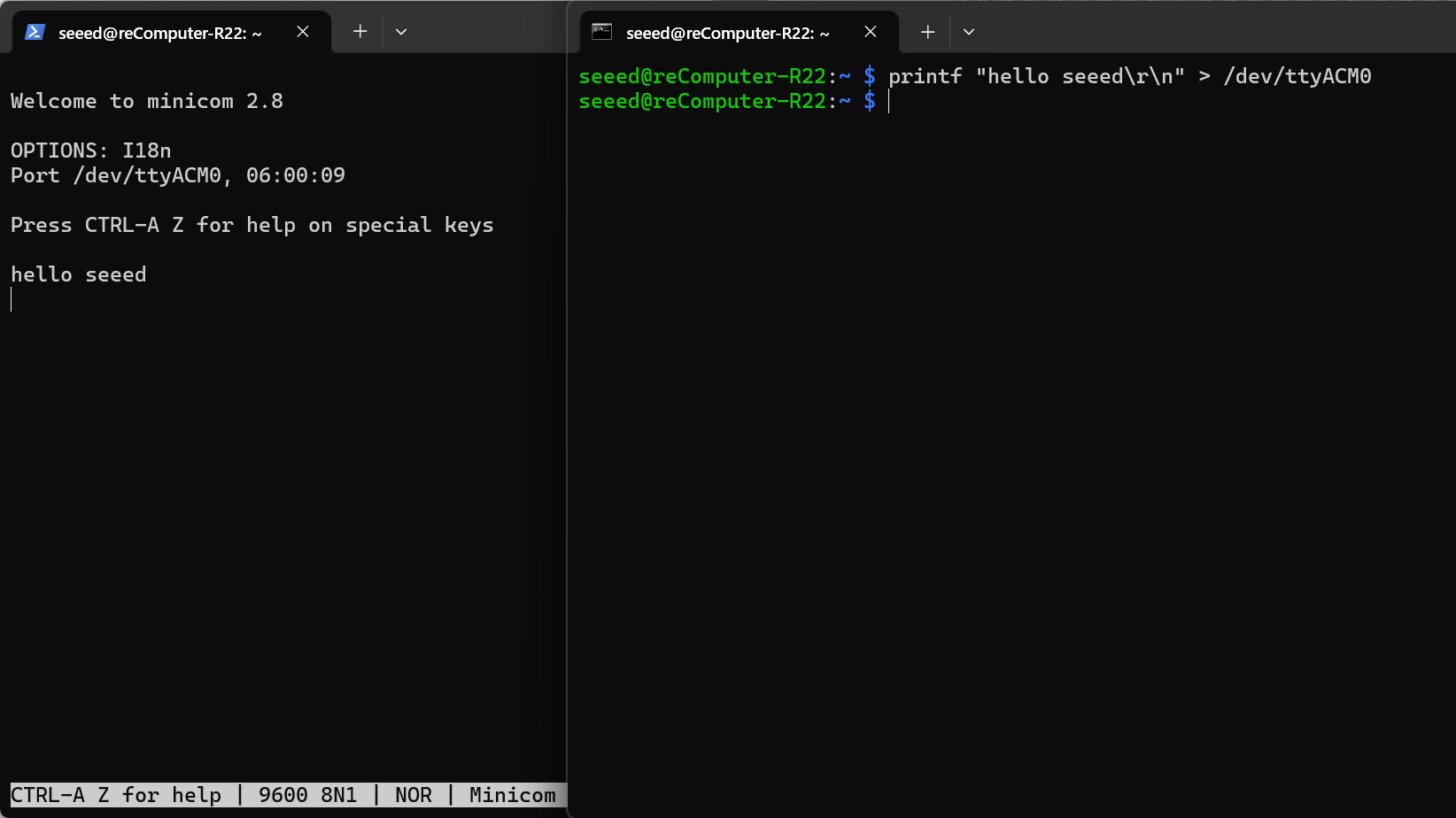
Você precisa abrir dois terminais, ACM1 se a placa de expansão estiver conectada, e ACM2 se a placa de expansão não estiver conectada: Terminal 1:*
sudo minicom -D /dev/ttyACM1 -b 9600
Se a placa de expansão não estiver conectada, você precisa alterar /dev/ttyACM1 para /dev/ttyACM0 .
Terminal 2:
printf "hello seeed\r\n" > /dev/ttyACM1
O Terminal 1 exibirá o conteúdo solicitado pelo Terminal 2 para ser impresso.
Teste de DI (Entrada Digital)
O reComputer Industrial R21xx contém 4x portas DI, o usuário pode configurar essas portas de acordo com as necessidades reais.
| Número de portas | Portas DI | GPIO estendido correspondente |
|---|---|---|
| 4 | DI1 | GPIO588 |
| DI2 | GPIO589 | |
| DI3 | GPIO590 | |
| DI4 | GPIO595 |
O tipo de entrada das portas DI é PNP. Ele suporta tensão de entrada de 5VDC~24VDC, corrente - 1000mA. Para testar a funcionalidade de DI, você pode seguir estas etapas para testá-la:
- A conexão entre a porta DI do reComputer Industrial R21xx e a carga externa foi concluída.
- Digite o seguinte comando para obter o status do GPIO:
echo 588 > /sys/class/gpio/export
echo in > /sys/class/gpio/gpio588/direction
cat /sys/class/gpio/gpio588/value
- Quando o nível externo é alto, o valor de /sys/class/gpio/gpio588/value é 0; quando o nível externo é baixo, /sys/class/gpio/gpio588/value é 1.
DO (Saída Digital)
O reComputer Industrial R21xx contém 4x portas DO, o usuário pode configurar essas portas de acordo com as necessidades reais.
| Número de portas | Portas DI | GPIO estendido correspondente |
|---|---|---|
| 4 | DO1 | GPIO638 |
| DO2 | GPIO637 | |
| DO3 | GPIO590 | |
| DO4 | GPIO636 | |
| DO5 | GPIO635 |
O tipo de saída das portas DO é transistor. Ele suporta tensão de saída - abaixo de 60 VDC, capacidade de corrente - 500 mA. Para testar a funcionalidade de DO, você pode seguir estas etapas para testá-la:
- A conexão entre a porta DO do reComputer Industrial R21xx e a carga externa foi concluída.
- Digite o seguinte comando para definir a saída para nível alto ou nível baixo:
echo 638 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio638/direction
echo 1 > /sys/class/gpio/gpio638/value
echo 0 > /sys/class/gpio/gpio638/value
- Quando o nível externo é alto, o valor de /sys/class/gpio/gpio638/value é 0; quando o nível externo é baixo, /sys/class/gpio/gpio638/value é 1.
Teste de CAN
Teste de loopback
| Número de portas | Portas DI | GPIO estendido correspondente |
|---|---|---|
| 2 | CAN_H/CAN_L | can0 |
Como o reComputer Industiral R22xx está equipado com apenas uma única interface CAN, ele não pode realizar testes de loopback independentes. Para verificar sua funcionalidade de comunicação, é necessário um dispositivo par externo ou um adaptador USB-para-CAN. Para este teste, o reComputer Industiral R21xx (com duas interfaces CAN) servirá como o nó par para estabelecer uma conexão com o reComputer Industiral R22xx. Consulte o seguinte tutorial para esquemas específicos de conexão e etapas de configuração:
- Use dois fios DuPont para fazer um curto-circuito entre H-H e L-L de can0 e can1 para formar um teste de loop mínimo.
CAN_H─────●───── CAN-H
CAN_L─────●───── CAN-L
G_CAN_H─────●───── G_CAN
- Confirme que as duas interfaces de rede can0 e can1 realmente aparecem no sistema para evitar que o driver não seja carregado:
# should print can0 can1
ls /sys/class/net | grep can
# should see "successfully initialized"
dmesg | grep -i can
- Configure as duas interfaces CAN para 500 kbit/s e coloque-as online, prontas para enviar e receber dados (defina-as para nível baixo por segurança): R22xx:
sudo ip link set can0 down
sudo ip link set can0 up type can bitrate 500000
R21xx:
sudo ip link set can1 down
sudo ip link set can1 up type can bitrate 500000
- Teste de comunicação (unidirecional) Use can-utils para enviar e receber dados.
Etapa A: R21xx (CAN1) envia → R22xx (CAN0) recebe
-
R22xx: candump can0
-
R21xx: cansend can1 123#DE.AD.BE.EF.CA.FE.00.11
Etapa B: R22xx (CAN0) envia → R21xx (CAN1) recebe
-
R21xx: candump can1
-
R22xx: cansend can0 555#1122334455667788
Teste do hub USB
Para testar o hub USB, você pode usar as seguintes etapas:
- Verifique se o hub USB é detectado executando o comando lsusb. Este comando lista todos os dispositivos USB conectados, incluindo hubs.
lsusb
A execução deste comando deve exibir informações sobre os dispositivos USB conectados ao seu sistema, incluindo quaisquer hubs USB presentes. Se o hub USB estiver funcionando corretamente, você deverá ver seus detalhes listados na saída do comando lsusb. Se ele não estiver listado, pode haver um problema com o hub ou com sua conexão ao sistema. Nesses casos, talvez seja necessário solucionar problemas do hub USB ou de suas conexões.
Teste do RTC (Relógio de Tempo Real)
Para testar a funcionalidade do Relógio de Tempo Real (RTC), siga estas etapas:
- Desative a sincronização automática de horário:
sudo systemctl stop systemd-timesyncd
sudo systemctl disable systemd-timesyncd
- Defina a hora: Defina o RTC para uma data e hora específicas:
sudo hwclock --set --date "2025-10-23 16:00:00"
- Sincronize a hora do RTC com o sistema Atualize a hora do sistema para corresponder à hora do RTC:
sudo hwclock --hctosys
- Verifique a hora do RTC:
sudo hwclock -r
Este comando irá ler e exibir a hora armazenada no RTC.
- Desconecte a fonte de alimentação do RTC, aguarde alguns minutos, depois reconecte-a e verifique novamente a hora do RTC para ver se ele manteve a hora correta.

Teste do temporizador watchdog
Para realizar um teste de watchdog, siga estas etapas:
- Instale o software de watchdog:
sudo apt install watchdog
- Edite o arquivo de configuração do watchdog:
# make sure you install vim already, if haven't, can install by the command below
sudo apt-get install vim
sudo vim /etc/watchdog.conf
Modifique a configuração da seguinte forma:
watchdog-device = /dev/watchdog
# Uncomment and edit this line for hardware timeout values that differ
# from the default of one minute.
watchdog-timeout = 120
# If your watchdog trips by itself when the first timeout interval
# elapses then try uncommenting the line below and changing the
# value to 'yes'.
#watchdog-refresh-use-settimeout = auto
# If you have a buggy watchdog device (e.g. some IPMI implementations)
# try uncommenting this line and setting it to 'yes'.
#watchdog-refresh-ignore-errors = no
# ====================== Other system settings ========================
#
# Interval between tests. Should be a couple of seconds shorter than
# the hardware time-out value.
interval = 15
max-load-1 = 24
#max-load-5 = 18
#max-load-15 = 12
realtime = yes
priority = 1
Você pode ajustar outras configurações conforme necessário.
- Certifique-se de que o serviço de watchdog está em execução:
sudo systemctl start watchdog
- Para testar a funcionalidade do watchdog, execute o seguinte comando para simular um travamento do sistema:
sudo su
echo 1 > /proc/sys/kernel/sysrq
echo "c" > /proc/sysrq-trigger
Este comando aciona um crash do kernel e deve fazer com que o watchdog reinicie o sistema.
- Monitore o sistema para confirmar que ele reinicia após o período de tempo limite especificado. Essas etapas ajudarão você a testar e garantir a funcionalidade do temporizador watchdog em seu sistema.

Controlando o buzzer via GPIO
O GPIO correspondente ao buzzer é o gpio627. Insira o seguinte script para ligar/desligar o buzzer:
- Ligar o buzzer:
echo 627 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio627/direction
echo 1 > /sys/class/gpio/gpio627/value
- Desligar o buzzer :Turn off the buzzer :
echo 627 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio627/direction
echo 0 > /sys/class/gpio/gpio627/value
TPM 2.0
Se você conectar o módulo TPM 2.0 ao dispositivo, o código a seguir pode ajudar a verificar a conexão do TPM.
ls /dev | grep tpm
Interpretando a saída:
Se você vir tpm0 e tpmrm0 na saída, isso significa que os dispositivos TPM (Trusted Platform Module) foram detectados e estão disponíveis em seu sistema. Isso indica que o hardware TPM foi reconhecido e está acessível, o que é um bom sinal. Você pode prosseguir usando funcionalidades ou aplicativos relacionados a TPM sabendo que os dispositivos estão presentes e acessíveis.
ATECC608A
Para interagir com o dispositivo ATECC608A e gerar um número de série aleatório, siga estas etapas:
- Clone o repositório atecc-util:
curl -LJO https://github.com/wirenboard/atecc-util/releases/download/v0.4.12/atecc-util_0.4.12_arm64.deb
- Extraia o conteúdo do pacote .deb para o diretório atual:
dpkg -x ./atecc-util_0.4.12_arm64.deb .
- Navegue até o diretório atecc:
cd usr/bin
- Gere um número de série aleatório:
./atecc -b 10 -s 192 -c 'serial'
Este comando instrui o utilitário ATECC a usar o slot 10 (-b 10), definir o tamanho do número de série para 192 bits (-s 192) e gerar um número de série aleatório (-c 'serial'). A saída será o número de série gerado, como "01235595d3d621f0ee". Esse processo permite que você interaja com o dispositivo ATECC608A e execute várias operações, como gerar números de série aleatórios.
Interagindo com a EEPROM
Aqui estão os comandos para interagir com uma EEPROM (Electrically Erasable Programmable Read-Only Memory):
- Conceda permissões completas (leitura, gravação e execução) ao arquivo de dispositivo da EEPROM:
sudo chmod 777 /sys/bus/i2c/devices/10-0050/eeprom
- Grave a string "This is a test string" no dispositivo EEPROM:
echo "This is a test string" > /sys/bus/i2c/devices/10-0050/eeprom
- Leia o conteúdo do dispositivo EEPROM e exiba-o em formato hexadecimal usando o utilitário hexdump:
cat /sys/bus/i2c/devices/6-0050/eeprom | hexdump -C
Verificando a detecção do SSD
Para listar os discos, incluindo o SSD, você pode usar o comando fdisk -l. Veja como:
sudo fdisk -l
Este comando exibirá uma lista de todos os discos conectados ao seu sistema, incluindo o SSD se ele for detectado corretamente. Procure por entradas que representem o seu SSD. Elas normalmente começam com /dev/sd seguido por uma letra (por exemplo, /dev/sda, /dev/sdb, etc.). Depois de identificar a entrada correspondente ao seu SSD, você pode prosseguir com o particionamento ou formatação conforme necessário.
UPS para desligamento seguro
Um GPIO6 entre a CPU e a entrada de alimentação DC é usado para alertar a CPU quando a fonte de alimentação é desligada. Em seguida, a CPU deve executar algo urgente em um script antes que a energia do supercapacitor se esgote e executar um "$ shutdown". Outra maneira de usar essa função é iniciar um desligamento quando o pino GPIO mudar. O pino GPIO fornecido é configurado como uma tecla de entrada que gera eventos KEY_POWER. Esse evento é tratado pelo systemd-logind iniciando um desligamento.
- Conexão de hardware.
Certifique-se de que o pino 'CM5_UPS_DET' do dispositivo UPS esteja conectado ao pino GPIO16 do dispositivo R21xx.
- Modifique o arquivo de configuração.
- Abra o terminal.
- Execute o seguinte comando para editar o arquivo de configuração:
sudo nano /boot/firmware/config.txt
- Adicione o seguinte conteúdo ao final do arquivo:
dtoverlay=gpio-shutdown,gpio_pin=GPIO16,active_low=1
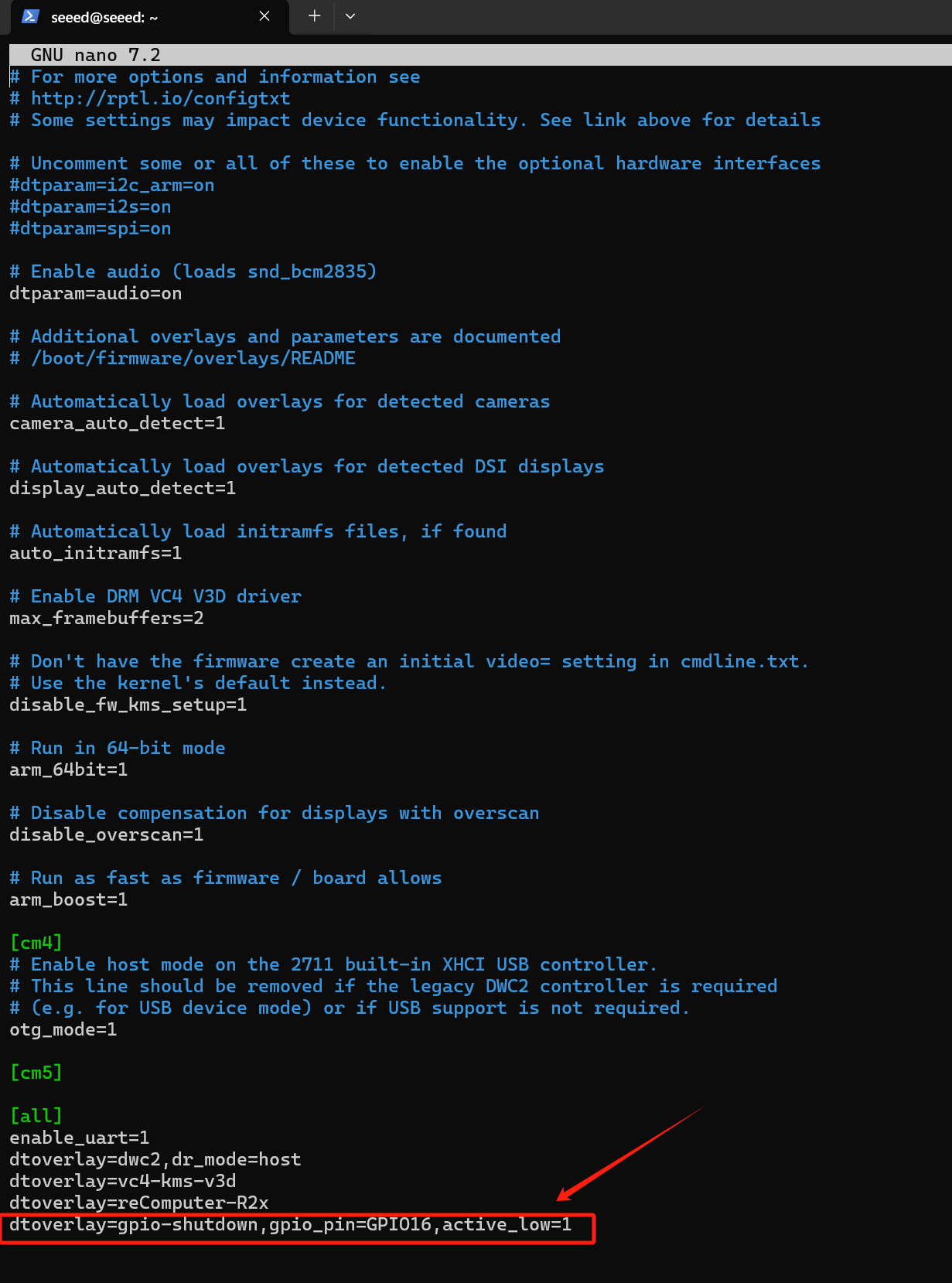
Salve e saia do editor (pressione Ctrl+O para salvar, Enter para confirmar e Ctrl+X para sair).
- Prepare o script em Python
- Crie um novo arquivo de script Python:
cd ~
sudo nano ups_shutdown.py
- Copie e cole o seguinte código no arquivo:
import RPi.GPIO as GPIO
import time, os
num = 0
GPIO.setmode(GPIO.BCM)
# Set GPIO16 to input mode
# Add 500ms anti-shake time to stabilize the software
GPIO.setup(16, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(16, GPIO.FALLING, bouncetime=500)
while True:
if GPIO.event_detected(16):
print("...External power off...")
print("")
# Sync data to disk
os.system('sync')
print("...Data saving...")
print("")
# Sleep for 3 seconds
time.sleep(3)
# Synchronize data again
os.system('sync')
# Countdown 5 seconds
while num < 5:
print('----------')
s = 5 - num
print('---' + str(s) + '---')
num = num + 1
time.sleep(1)
print('----------')
# Execute shutdown command
os.system('sudo shutdown -h now')
Salve e saia do editor (pressione Ctrl+O para salvar, Enter para confirmar e Ctrl+X para sair).
- Execute o script.
- Abra o terminal.
- Execute o seguinte comando para rodar o script:
sudo python3 ups_shutdown.py
Use sudo para garantir que o script tenha permissões suficientes para executar o comando de desligamento.
- Simular teste de falha de energia
- Corte a alimentação de energia externa.
- Observe se o sistema salva os dados automaticamente e desliga.
- Verificar o resultado
- Reconecte a alimentação de energia.
- Verifique se os dados do sistema estão completos e se a inicialização ocorre normalmente.
- Para a função de UPS, entre em contato conosco para mais informações.
- O sinal de alarme é ativo em nível BAIXO.
Acelerador de IA
O slot M.2 M-KEY 2240 no reComputer Industrial R21xx é projetado para acomodar um Acelerador de IA M.2 PCIE. E a série R21xx-12 vem pré-instalada com um módulo Hailo-8 M.2 de Aceleração de IA de até 26TOPS. Se você adquiriu o produto da série R21xx-10, será necessário adquirir o módulo NPU da Hailo para habilitar a funcionalidade de IA. O dispositivo vem pré-instalado com o driver do acelerador Hailo, então você pode usá-lo diretamente e executar o caso de teste:
- Navegue até o diretório do caso de teste
cd /mnt/hailo-rpi5-examples/
- Inicie o ambiente virtual
source ./setup_env.sh
- Execute o exemplo simples de detecção
python basic_pipelines/detection_simple.py
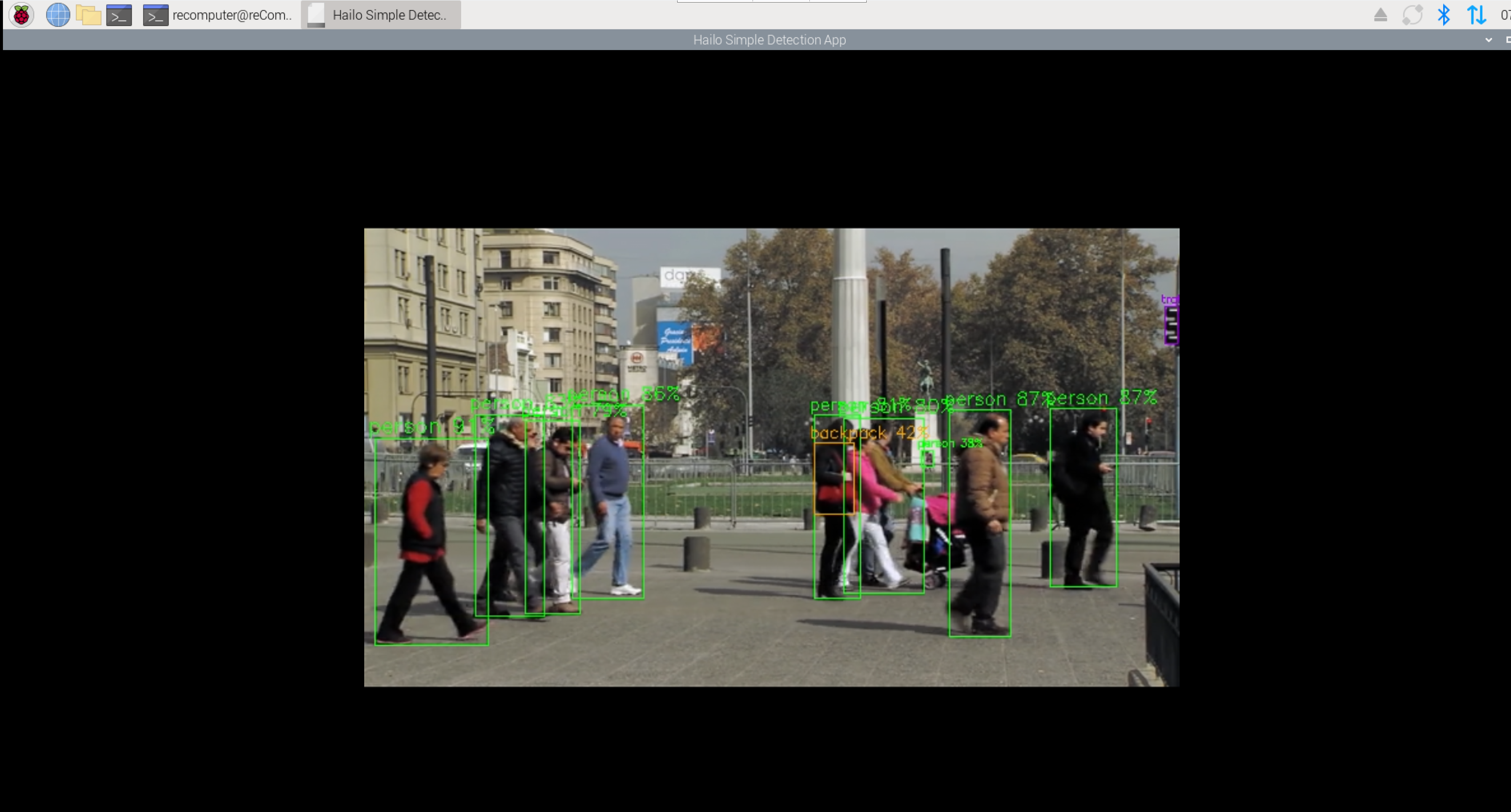
Para fechar o aplicativo, pressione Ctrl+C .
Esta é uma versão leve do exemplo de detecção, focada principalmente em demonstrar o desempenho da Hailo enquanto minimiza a carga da CPU. O pipeline interno de processamento de vídeo do GStreamer é simplificado, minimizando as tarefas de processamento de vídeo, e o modelo YOLOv6 Nano é utilizado.
Se o reComputer que você adquiriu não inclui o Hailo-8 e você está considerando adquirir um dispositivo Hailo para integração, consulte a documentação oficial da Hailo (https://github.com/hailo-ai) para configurar o firmware e o ambiente, e execute os exemplos para verificar se o dispositivo pode ser usado normalmente.
Câmera IP PoE
A série reComputer Industrial R22xx é projetada para fluxos de vídeo IP de alta densidade e automação industrial. Ela possui 5 portas físicas Gigabit Ethernet com uma arquitetura de barramento híbrida para garantir largura de banda máxima e estabilidade.
Distribuição do barramento interno:
- eth0 (Nativo): Conectado diretamente ao SoC. Oferece a menor latência e é recomendado como Uplink Primário (WAN) ou Porta de Gerenciamento.
- eth1 (Extensão USB): A porta independente localizada ao lado da porta nativa. É estendida via barramento USB 3.0 e suporta saída PoE.
- eth2, eth3, eth4 (Extensão PCIe): As três portas consecutivas. São estendidas via barramento PCIe e suportam saída PoE.
- Especificações técnicas
| Categoria | Especificação | Observações |
|---|---|---|
| Total de portas | 1 (Nativa) + 4 (Estendidas) | 5x RJ45 Gigabit Ethernet |
| Modo PoE | Alternativa A (Modo A) | Energia fornecida pelos pares de dados (1/2, 3/6) |
| Saída PoE por porta | 12W (Máx.) | Otimizado para câmeras IP padrão |
| Saída PoE paralela | Todas as 4 portas suportam 12W simultaneamente | Requer entrada de energia do sistema suficiente |
| Faixa de entrada de energia | 9V - 36V DC | Circuito interno de elevação aumenta para 48V para PoE |
| Recursos de segurança | Proteção contra sobrecorrente e subtensão | Hot-plug é estritamente proibido |
- Diretrizes críticas de segurança
- NÃO FAÇA HOT-PLUG:
AVISO: Conectar ou desconectar cabos Ethernet enquanto a alimentação PoE estiver ativa (GPIO em nível alto) pode causar surtos transitórios que podem danificar os chips LAN7800 ou as pontes PCIe. Sempre siga o princípio "Conectar primeiro, energizar depois".
- Recomendações de fonte de alimentação:
Embora o dispositivo suporte entrada de 9V, recomendamos o uso de uma fonte de alimentação industrial de 24V com pelo menos 72W (3A) de capacidade para garantir alta eficiência de conversão quando todas as 4 portas PoE estiverem em carga total (4 × 12W).
- Etapas de configuração
- Etapa 1: Desabilitar serviços conflitantes
Para evitar que gerenciadores de rede de desktop sobrescrevam as configurações de IP estático industriais, desabilite o
NetworkManager.
# Switch to systemd-networkd
sudo systemctl disable --now NetworkManager
sudo systemctl mask NetworkManager
sudo systemctl enable --now systemd-networkd
- Etapa 2: Habilitar alimentação automática para PoE (GPIO)
Adicione os seguintes comandos a
/etc/rc.localantes da linhaexit 0para garantir que a alimentação PoE seja habilitada na inicialização.
# Export and set PoE Enable Pin (Example: GPIO 532)
echo 652 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio652/direction
echo 1 > /sys/class/gpio/gpio652/value
- Etapa 3: Implantação de IP multi-interface
Atribua sub-redes independentes a cada porta e use RouteMetric para garantir que
eth0permaneça o gateway padrão para acesso à internet.
# Configure eth0 (WAN/DHCP) - Highest Priority
sudo bash -c 'cat > /etc/systemd/network/10-eth0.network <<EOF
[Match]
Name=eth0
[Network]
DHCP=yes
[DHCPv4]
RouteMetric=10
EOF'
# Configure eth1-eth4 (Static IP Segments)
for i in {1..4}; do
sudo bash -c "cat > /etc/systemd/network/20-eth$i.network <<EOF
[Match]
Name=eth$i
[Network]
Address=10.0.$((i+2)).10/24
[IPv4]
RouteMetric=$((100+i))
EOF"
done
- Verificação e solução de problemas
- Verificar conectividade do barramento
Use
lspcielsusbpara verificar se todos os controladores são reconhecidos pelo sistema:
- Portas estendidas PCIe (eth2-4): Execute
lspci | grep Ethernet - Porta estendida USB (eth1): Execute
lsusb -te procure pelo driverlan78xx.
- FAQ
- P: Por que minha câmera continua reiniciando?
- R: Verifique se o consumo de energia da câmera excede 12W. Câmeras PTZ de alta potência ou aquelas com iluminadores IR potentes podem exceder esse limite.
- P: Posso usar entrada de 12V DC para PoE?
- R: Sim. O circuito interno elevará 12V para 48V. No entanto, certifique-se de que sua fonte de alimentação de 12V possa suportar alta corrente, pois a perda de conversão é maior em tensões de entrada mais baixas.
- P: O nome da interface não é eth1-4.
- R: Use
ip linkpara encontrar o nome real do kernel (por exemplo,enp1s0) e atualize o campoName=em seus arquivos.network.
- R: Use
- Status de suporte para câmera PoE de 4 canais:
reComputer R22 & reCamera
Este guia fornece um passo a passo para conectar uma reCamera — uma câmera de IA modular e open-source alimentada pela plataforma RISC-V e projetada para implantação rápida de Edge AI — ao reComputer R22 via PoE. Ele abrange a implantação de um stream RTSP usando Node-RED e a visualização do feed ao vivo no R22.
- Conexão de hardware e inicialização
- Modelos compatíveis: série reCamera (versão PoE, por exemplo, LH-AR01).
- Conexão física: Conecte a reCamera a qualquer porta PoE (eth1-eth4) no R22 usando um cabo Ethernet padrão.
- Habilitar alimentação PoE:
Execute os seguintes comandos no terminal do R22 para habilitar a saída de 48V:
# Enable GPIO 652
echo 652 > /sys/class/gpio/export
echo out > /sys/class/gpio/652/direction
echo 1 > /sys/class/gpio/652/value

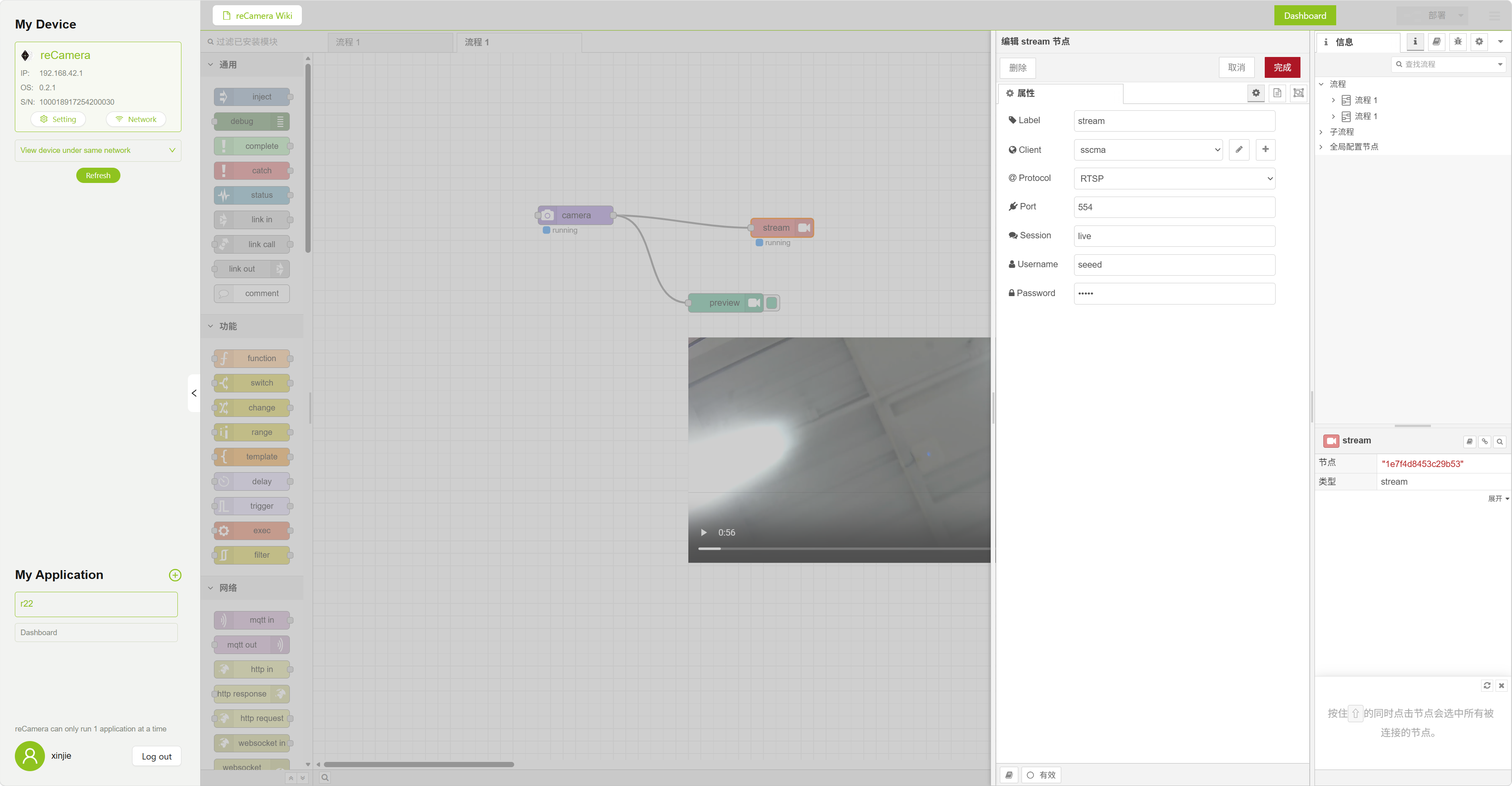
- Configuração da reCamera (Importação Node-RED com um clique)
Use o flows.json pré-configurado para implantar rapidamente um stream RTSP autenticado.
- Acessar o painel: Abra o navegador e vá para
http://10.0.3.200:1880(IP padrão da reCamera). - Importar configuração:
- Clique no ícone de menu
≡no canto superior direito -> Import. - Envie o arquivo flows.json e clique em Import.
- Clique no ícone de menu
- Autenticação personalizada (Obrigatório):
- Clique duas vezes no nó
RTSP Outputno fluxo. - Na seção Authentication, defina suas credenciais:
- Username:
seeed - Password:
seeed
- Username:
- Clique duas vezes no nó
- Deploy: Clique no botão vermelho Deploy no canto superior direito.
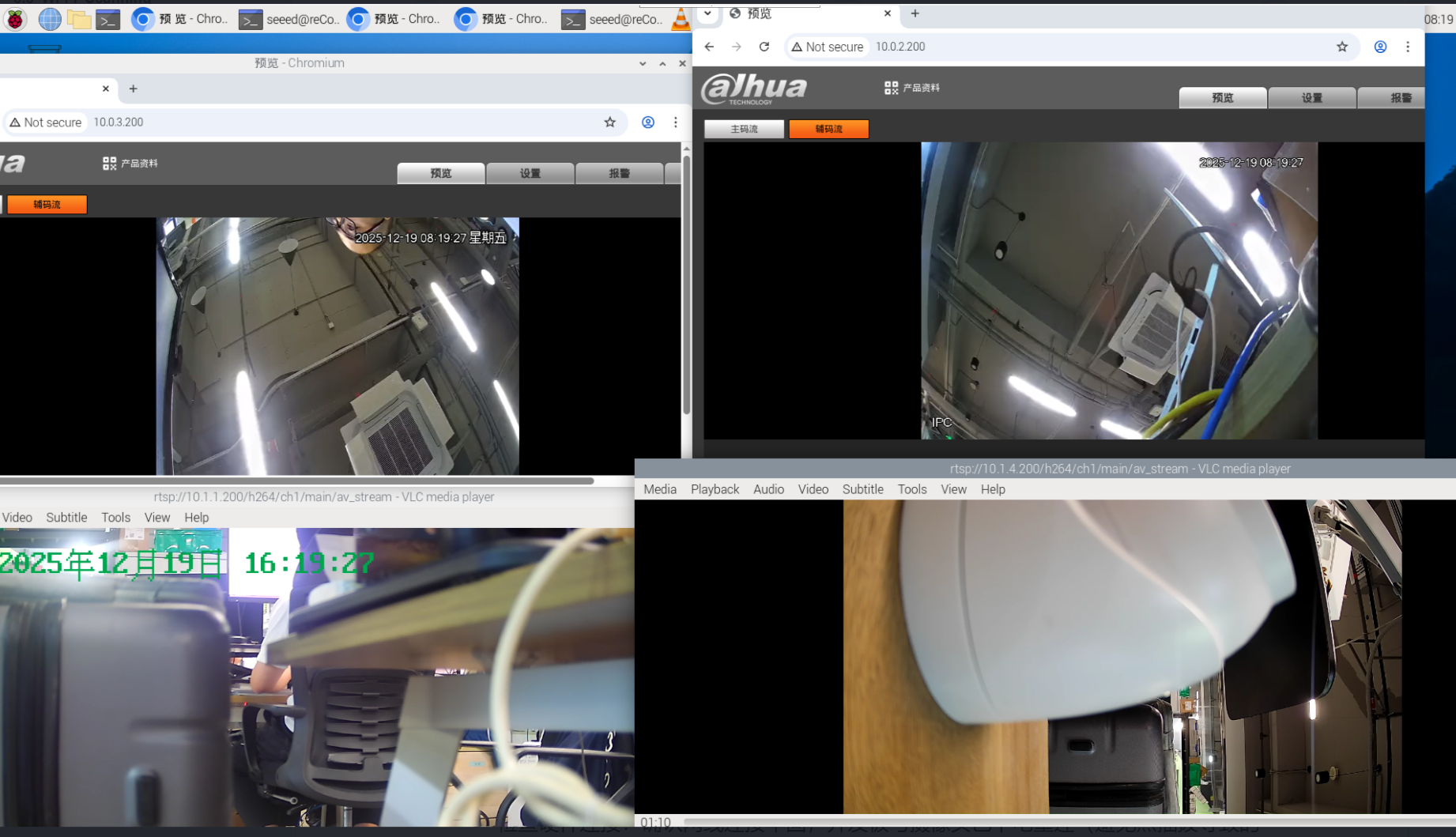
- Visualizando o stream de vídeo no R22
Como o R22 (baseado em CM4/CM5) suporta decodificação por hardware, recomendamos usar VLC ou FFplay para verificação.
- Opção A: Usando a interface gráfica do VLC (Recomendado)
- Digite
vlcno terminal do R22 para abrir o player. - Vá em Media -> Open Network Stream.
- Insira a URL RTSP autenticada:
rtsp://seeed:[email protected]:554/live - Clique em Play.
- Opção B: Usando a linha de comando (Teste rápido)
Copie e execute diretamente o seguinte comando:
ffplay -fflags nobuffer -flags low_delay rtsp://seeed:[email protected]:554/live
- Solução de problemas
| Problema | Causa potencial | Solução |
|---|---|---|
| Não é possível dar ping em 10.0.3.200 | Conflito de IP interno do R22 | Verifique se eth3/eth4 estão ambos usando 10.0.3.10. Altere um manualmente. |
| reCamera não inicializa | Alimentação PoE não habilitada | Certifique-se de que o GPIO 652 esteja definido como 1 e que a entrada de energia seja > 12V/3A. |
| Atraso/latência de vídeo | Problemas de rede ou MTU | Certifique-se de que não haja tráfego intenso de broadcast entre o R22 e a reCamera. |
Suporte técnico e discussão de produtos
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.