Placa carrier Robotics J401 – Hardware e Primeiros Passos
A reComputer Robotics J401 é uma placa carrier de IA de borda compacta e de alto desempenho, projetada para robótica avançada. Compatível com módulos NVIDIA Jetson Orin Nano/Orin NX nos modos Super/MAXN, ela oferece até 157 TOPS de desempenho de IA. Equipada com amplas opções de conectividade — incluindo duas portas Gigabit Ethernet, slots M.2 para módulos 5G e Wi‑Fi/BT, 6 portas USB 3.2, CAN, GMSL2 (via expansão opcional), I2C e UART — ela funciona como um poderoso cérebro robótico capaz de processar dados complexos de vários sensores. Pré-instalada com JetPack 6 e Linux BSP, garante uma implantação contínua.
Com suporte a frameworks como NVIDIA Isaac ROS, Hugging Face, PyTorch e ROS 2/1, a reComputer Robotics J401 conecta a tomada de decisão orientada por grandes modelos de linguagem ao controle físico de robôs, como planejamento de movimento e fusão de sensores. Ideal para o desenvolvimento rápido de robôs autônomos, ela acelera o tempo de lançamento com interfaces prontas para uso e frameworks de IA otimizados.

Visão geral da placa carrier reComputer Jetson Robotics J401
| Vista superior |
|---|
 |
| Vista superior |
 |
| Vista superior |
 |
Lista de componentes
- Placa carrier reComputer Robotics J401 x 1
- Fonte de alimentação e placa de expansão JST x 1
- Cabo XT30 para DC x 1
- Cabo USB, Tipo A para Tipo C x 1
- Dissipador de calor para placa de expansão x 1
- Pino roscado (M3*30) x 5
- Porca sextavada M3 x 5
- Parafuso (CM2.5*L.4) para módulo Jetson e M.2 Key M x3
- Parafuso (CM2*3.0) para M.2 Key E x1
- Pino roscado (M2*2.0) para M.2 Key B x1
- Parafuso (CM3*4.0) para M.2 Key B x1
- Manual do Usuário x 1
- Ao utilizar fonte de alimentação de alta tensão e em temperatura de operação elevada, projete uma solução robusta de dissipação de calor de acordo com o Guia de Projeto Térmico.
- Fixe o dissipador de calor no módulo para obter melhor desempenho.
- Durante a operação com entrada de alta tensão e alta carga, não toque no dissipador de calor para evitar queimaduras.
- Recomendação de adaptador de energia para validação: use o adaptador de energia recomendado no site oficial da Seeed.
- Adaptador de energia tipo barril 5525 19V/4.74A
- Certifique-se de que os requisitos máximos de consumo de energia sejam atendidos.
- Compatibilidade do cabo de alimentação AC
- Compre cabos de alimentação AC tipo trevo específicos para a sua região, de acordo com sua localização.
- Compatibilidade de acessórios
- Use apenas acessórios oficialmente recomendados (por exemplo, módulos sem fio, câmeras, periféricos) para desempenho e compatibilidade ideais.
Especificações
Especificações da placa carrier
| Categoria | Item | Detalhes |
|---|---|---|
| Armazenamento | M.2 KEY M PCIe | 1x M.2 KEY M PCIe (inclui SSD M.2 NVMe 2280 de 128G) |
| Rede | M.2 KEY E | 1x M.2 Key E para módulo WiFi/Bluetooth |
| M.2 KEY B | 1x M.2 Key B para módulo 5G | |
| Ethernet | 2x RJ45 Gigabit Ethernet | |
| I/O | USB | 6x USB 3.2 Tipo-A (5Gbps); 1x USB 3.0 Tipo-C (Host/DP 1.4); 1x USB 2.0 Tipo-C (Modo Device/Depuração) |
| Câmera | 1x 4 em 1 GMSL2 (mini fakra) (placa opcional) | |
| CAN | 2x CAN0 (XT30(2+2)); 3x CAN1 (conector GH 4 pinos 1,25) | |
| Display | 1x DP1.4 (Tipo C Host) | |
| UART | 1x UART conector GH 4 pinos 1,25 | |
| I2C | 2x I2C conector GH 4 pinos 1,25 | |
| Ventoinha | 1x conector de ventoinha 4 pinos (PWM 5V); 1x conector de ventoinha 4 pinos (PWM 12V) | |
| Porta de expansão | 1x conector de expansão de câmera (para placa GMSL2) | |
| RTC | 1x RTC 2 pinos; 1x soquete RTC | |
| LED | 3x LED (PWR, ACT e LED de usuário) | |
| Botão de agulha | 1x PWR; 1x RESET | |
| Chave DIP | 1x REC | |
| Orifício para antena | 5x orifício para antena | |
| Alimentação | 19-54V XT30(2+2) (inclui cabo XT30 para conector DC 5525) | |
| Versão do Jetpack | Jetpack 6 | |
| Mecânico | Dimensões (L x P x A) | 115mm x 115mm x 38mm |
| Peso | 200g | |
| Instalação | Sobre a mesa, Montagem em parede | |
| Temperatura de operação | -20℃~60℃ (Modo 25W); -20℃~55℃ (Modo MAXN); (com dissipador de calor reComputer Robotics com ventoinha) | |
| Garantia | 2 anos | |
| Certificação | RoHS, REACH, CE, FCC, UKCA, KC | |
Gravar o sistema JetPack OS
Módulo compatível
- NVIDIA® Jetson Orin™ Nano Module 4GB
- NVIDIA® Jetson Orin™ Nano Module 8GB
- NVIDIA® Jetson Orin™ NX Module 8GB
- NVIDIA® Jetson Orin™ NX Module 16GB
Pré-requisitos
- PC host com Ubuntu
- Placa carrier Robotics J401
- Módulo NVIDIA® Jetson Orin™ Nano/NX
- Ventoinha ativa para módulo Nano/NX
- SSD interno NVMe M.2 2280
- Cabo de transmissão de dados USB Tipo-C
Recomendamos que você use dispositivos físicos host com Ubuntu em vez de máquinas virtuais. Consulte a tabela abaixo para preparar a máquina host.
| Versão do JetPack | Versão do Ubuntu (Computador Host) | ||
| 18.04 | 20.04 | 22.04 | |
| JetPack 6.x | ✅ | ✅ | |
Preparar a imagem do Jetpack
Aqui, precisamos baixar a imagem do sistema para nosso PC Ubuntu, correspondente ao módulo Jetson que estamos usando:
| Versão do Jetpack | Módulo Jetson | GMSL | Link de download 1 | SHA256 |
|---|---|---|---|---|
| 6.2 | Orin Nano 4GB | ✅ | Download | c63d1219531245abecc7bbdcafc73d3 4f75547454c7af85de40f08396a87e5ee |
| Orin Nano 8GB | ✅ | Download | 5d1f3cd28eb44ca60132c87ccce5aca f806ee945b486df9061a34de73fbb582b | |
| Orin NX 8GB | ✅ | Download | e7f0c8e6b578d411f81122879f92c76 66adfada5ed493a4cc458dc169ca8c1b7 | |
| Orin NX 16GB | ✅ | Download | b08cbdad8ab6e50222146d3175a9d2 627d499bf1d67cfaf69cc737b5bfa9e33a |
O arquivo de imagem do Jetpack 6 tem aproximadamente 14,2 GB e o download deve levar cerca de 60 minutos. Aguarde até que o download seja concluído.
Para verificar a integridade do firmware baixado, você pode comparar o valor de hash SHA256.
Em uma máquina host Ubuntu, abra o terminal e execute o comando sha256sum <File> para obter o valor de hash SHA256 do arquivo baixado. Se o hash resultante corresponder ao hash SHA256 fornecido no wiki, isso confirma que o firmware que você baixou está completo e íntegro.
Entrar no modo Force Recovery
Antes de prosseguirmos para as etapas de instalação, precisamos garantir que a placa esteja em modo force recovery.
Passo a passo
Passo 1. Altere a chave para o modo RESET.

Passo 2. Ligue a placa carrier conectando o cabo de alimentação.
Passo 3. Conecte a placa ao PC host Ubuntu com um cabo USB Tipo‑C de transmissão de dados.
Passo 4. No PC host Linux, abra uma janela do Terminal e digite o comando lsusb. Se o conteúdo retornado tiver uma das seguintes saídas de acordo com o Jetson SoM que você usa, então a placa está em modo de recuperação forçada.
- Para Orin NX 16GB: 0955:7323 NVidia Corp
- Para Orin NX 8GB: 0955:7423 NVidia Corp
- Para Orin Nano 8GB: 0955:7523 NVidia Corp
- Para Orin Nano 4GB: 0955:7623 NVidia Corp
A imagem abaixo é para Orin Nano 8GB

Gravar no Jetson
Passo 1: Extraia o arquivo de imagem baixado:
cd <path-to-image>
sudo tar xpf mfi_xxxx.tar.gz
# For example: sudo tar xpf mfi_recomputer-robo-orin-nano-8g-j401-gmsl-6.2-36.4.3-2026-02-06.tar.gz
Passo 2: Execute o seguinte comando para gravar o sistema JetPack no SSD NVMe:
cd mfi_xxxx
# For example: cd mfi_recomputer-orin-robotics-j401
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
Você verá a seguinte saída se o processo de gravação for bem-sucedido

O comando de gravação pode levar de 2 a 10 minutos.
Passo 3: Conecte o Robotics J401 a um monitor usando o adaptador PD para HDMI para conectar a um monitor que suporte entrada HDMI, ou conecte diretamente a um monitor que suporte entrada PD usando o cabo PD e finalize a configuração inicial:

Conclua a Configuração do Sistema de acordo com suas necessidades.
Uso das Interfaces
A seguir serão apresentadas as várias interfaces da placa Robotics J401 e como usá‑las.
M.2 Key M
M.2 Key M é projetado para SSDs NVMe de alta velocidade, proporcionando transferência de dados ultrarrápida para aplicações de robótica.
SSDs compatíveis são os seguintes
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
Conexão de Hardware

Instruções de Uso
Abra o terminal no dispositivo Jetson e digite o seguinte comando para testar a velocidade de leitura e gravação do SSD.
#You need to create a blank test file first
sudo touch /ssd/test
dd if=/dev/zero of=/home/seeed/ssd/test bs=1024M count=5 conv=fdatasync

Execute o comando sudo rm /home/seeed/ssd/test para excluir os arquivos de cache após a conclusão do teste.
M.2 Key B
O slot M.2 Key B é para expansão de Módulo 5G, permitindo conectividade celular de alta velocidade para cenários de robótica e IA de borda.
Conexão de Hardware

Instruções de Uso
Passo 1. Verificar Reconhecimento de Hardware
lsusb
Este comando exibe uma lista de todos os dispositivos USB conectados ao sistema, juntamente com seu fabricante (ID), tipo e outras informações. Por exemplo, a saída pode mostrar um dispositivo da Quectel Wireless Solutions Co., Ltd. EM12-G, indicando que o módulo 5G está presente.

Passo 2. Confirmar Carregamento do Driver É essencial garantir que o driver option, que é necessário para o módulo 5G, esteja carregado. Podemos usar o comando lsmod para verificar.
lsmod | grep option
Se o driver option for carregado com sucesso, informações relevantes sobre o driver serão exibidas na saída.

Passo 3. Configurar o ModemManager ModemManager é uma ferramenta para gerenciar dispositivos modem, e precisa ser instalado e reiniciado.
sudo apt install modemmanager
sudo systemctl restart ModemManager
O comando apt install é usado para instalar o pacote ModemManager, enquanto systemctl restart reinicia o serviço ModemManager para garantir que as novas configurações entrem em vigor.
Passo 4. Verificar Identificação do Módulo Podemos usar o comando mmcli -L para verificar se o ModemManager consegue identificar corretamente o módulo 5G.
mmcli -L
Se o módulo 5G for reconhecido, uma saída semelhante a /org/freedesktop/ModemManager1/Modem/0 será exibida, indicando o caminho para o dispositivo modem detectado.

Passo 5. Definir o APN APN (Access Point Name) é crucial para conectar um dispositivo móvel à rede. Usaremos o comando nmcli para criar um perfil de portador. Tomando a China Mobile como exemplo, podemos criar um arquivo de configuração com os seguintes comandos:
sudo nmcli con add type gsm ifname "*" apn "CMNET" ipv4.method auto
Este comando adiciona uma nova conexão do tipo GSM (Global System for Mobile Communications), especificando o APN como "CMNET" e usando configuração IPv4 automática.

Passo 6. Ativar a Conexão Após criar o perfil de portador, precisamos ativar a conexão.
sudo nmcli con up "gsm"
Este comando ativa a conexão GSM e, se for bem-sucedido, uma mensagem de confirmação será exibida.
Passo 7. Reverificar Identificação do Módulo Execute novamente o comando mmcli -L para garantir que o módulo continua reconhecido após a configuração do APN.
mmcli -L
Passo 8. Verificar o Status do Módulo Por fim, podemos usar o comando mmcli -m 0 para ver informações detalhadas sobre o módulo, como alocação de IP, operadora e status da conexão de rede.
mmcli -m 0
Este comando fornece detalhes abrangentes sobre o módulo 5G, incluindo seu fabricante, modelo, tecnologias de rede suportadas e atuais, status do dispositivo e operadoras de rede conectadas.

M.2 Key E
A interface M.2 Key E é um conector M.2 padrão usado principalmente para conectar módulos sem fio, como Wi‑Fi e Bluetooth, para expandir as capacidades de comunicação sem fio.
Conexão de Hardware

Instruções de Uso
Para testar o desempenho do Wi‑Fi, use o seguinte comando (substitua o endereço IP pelo do seu servidor de teste):
iperf3 -c 192.168.6.191

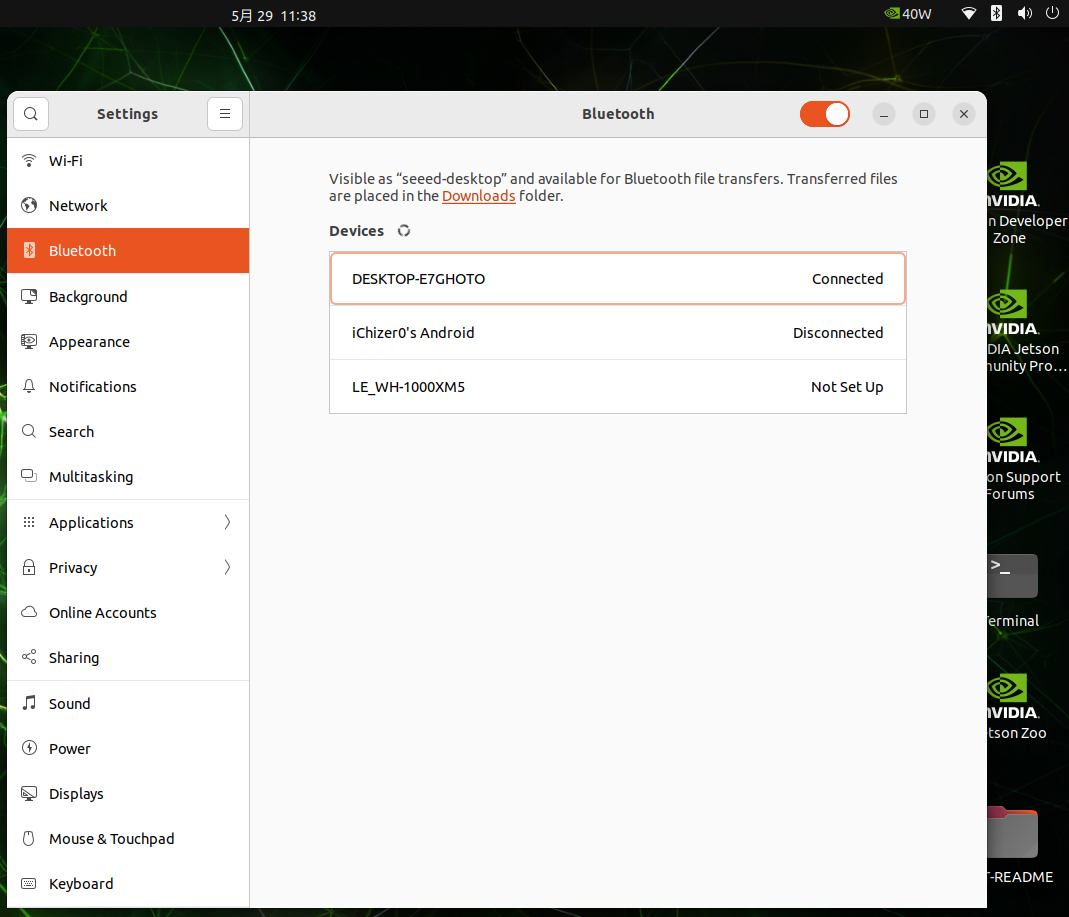
A funcionalidade Bluetooth está disponível por meio do slot M.2 Key E.
Ethernet
A placa carrier Robotics j401 possui 2 portas Ethernet RJ45 de 1Gbps para conectividade de rede cabeada em alta velocidade.

Para testar a velocidade da porta Ethernet, use iperf3 da seguinte forma:
iperf3 -c <server_ip> -B <bind_ip>
<server_ip> é o endereço IP do servidor iperf3. O cliente se conectará a esse servidor para realizar um teste de largura de banda.
<bind_ip> vincula o endereço IP local especificado como a origem do tráfego de teste.

LED
O reComputer Jetson Robotics J401 possui 3 indicadores LED (PWR, ACT e User LED) que fornecem feedback claro de status para energia, atividade do sistema e funções definidas pelo usuário.

Instruções de Uso
O User LED é um LED RGB que pode exibir cores diferentes para indicar vários estados, precisando ser definido pelo usuário.
Aqui está um script de teste para controlar o LED RGB:
touch rgb_test
chmod +x rgb_test
vi rgb_test
Cole o seguinte conteúdo:
#!/bin/bash
# RED ON
gpioset --mode=time --sec=1 2 0=1
sleep 2
# RED OFF
gpioset --mode=time --sec=1 2 0=0
# Blue ON
gpioset --mode=time --sec=1 2 1=1
sleep 2
# Blue OFF
gpioset --mode=time --sec=1 2 1=0
# Green ON
gpioset --mode=time --sec=1 2 2=1
sleep 2
# Green OFF
gpioset --mode=time --sec=1 2 2=0
Execute o script para testar o LED RGB.

USB
A placa carrier Robotics j401 está equipada com uma variedade de portas USB, incluindo 6 portas USB 3.2 Tipo‑A (5Gbps), uma porta USB 3.0 Tipo‑C com DP 1.4 (modo Host) e uma porta USB 2.0 Tipo‑C para modo dispositivo/depuração, oferecendo opções de conectividade versáteis.
Teste de Velocidade USB
Crie um script para testar a velocidade do dispositivo USB:
sudo vim test_usb
Cole o seguinte conteúdo:
#!/bin/bash
sudo dd if=/dev/zero of=/dev/$1 bs=1000M count=2 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
sudo dd if=/dev/$1 of=/dev/null bs=1000M count=2
Torne o script executável:
sudo chmod +x test_usb
Execute o script com o nome do seu dispositivo USB como argumento.
Porta USB 2.0 Type-C
Usando esta porta serial, via o cabo de dados USB C, você pode monitorar as informações de depuração de entrada e saída no lado do PC.
Passo 1. Coloque a chave na posição de modo de depuração.

Passo 2. Conecte o PC por meio de um cabo de dados USB, baixe o CP210X Driver no seu PC.

Passo 3. Conecte o PC por meio de um cabo de dados USB, extraia o arquivo baixado e instale o driver no seu PC.

Passo 4. Abra o Gerenciador de Dispositivos no seu PC com Windows e verifique o número da porta COM atribuída ao reComputer Super. Ele deve aparecer em "Ports (COM & LPT)" como "Silicon Labs CP210x USB to UART Bridge (COMX)", onde X é o número da porta COM.

Passo 5. Abra a ferramenta de porta serial (aqui usamos a ferramenta MobaXterm como exemplo), crie uma nova sessão.

Passo 6. Selecione a ferramenta Serial.

Passo 7. Selecione a porta serial correspondente, defina a taxa de transmissão para 115200 e clique em "OK".

Passo 8. Faça login no seu reComputer Super com o nome de usuário e a senha.

Câmera USB
Usando uma câmera USB através das portas USB 3.2 Type-A, instale e execute guvcview:
sudo apt-get install guvcview
guvcview -d /dev/video0

Ventoinha
O reComputer Jetson Robotics J401 é equipado com dois tipos de conectores de ventoinha para atender a diferentes necessidades de tensão e resfriamento:
-
1x Conector de Ventoinha de 4 Pinos (5V PWM): projetado para ventoinhas silenciosas de baixa tensão e baixa potência, este conector suporta controle de velocidade por PWM, permitindo ajuste inteligente da velocidade da ventoinha com base na temperatura do sistema para melhorar a eficiência energética e reduzir o ruído.
-
1x Conector de Ventoinha de 4 Pinos (12V PWM): compatível com ventoinhas PWM padrão de 12V, também suporta controle preciso de velocidade, sendo ideal para necessidades de resfriamento de alto desempenho.
Conexão de Hardware

Para mais informações, verifique aqui.
Crie um script para definir a velocidade da ventoinha:
cat test_fanSpeedSet
Cole o seguinte conteúdo:
#!/bin/bash
sudo systemctl stop nvfancontrol
sleep 2
echo "000000" | sudo -S chmod 777 /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
echo $1 > /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
Observação: Para Jetson Nano 4G, o caminho da ventoinha é
/sys/devices/platform/pwm-fan/hwmon/hwmon0/pwm1.
Além disso, podemos definir manualmente a velocidade da ventoinha usando a ferramenta jtop.
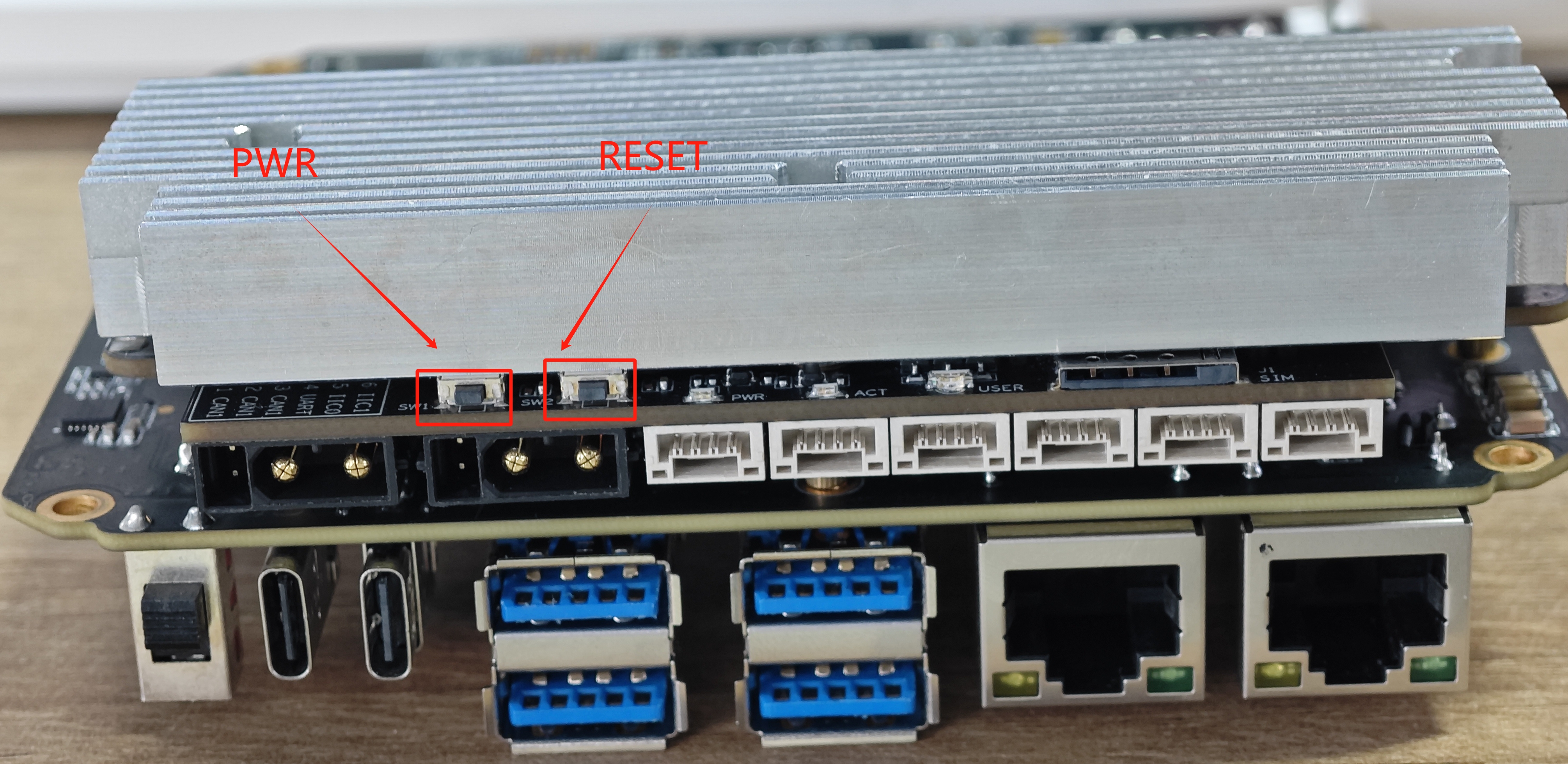
Botão de Pinhole
A placa-mãe Robotics J401 possui um Botão de Pinhole para interação do usuário, incluindo um botão de Energia (PWR) e um botão de Redefinição (RESET). Esses botões são essenciais para ligar/desligar o dispositivo e realizar reinicializações do sistema, respectivamente.
CAN
CAN (Controller Area Network) é um padrão robusto de barramento veicular que permite que microcontroladores e dispositivos se comuniquem entre si sem um computador host. O Robotics J401 oferece uma interface CAN0 integrada ao conector de alimentação XT30 (2+2) para transmissão conveniente de energia e dados. Além disso, oferece 3 interfaces CAN1 por meio de dois conectores JST padrão de 4 pinos para conectividade flexível ao barramento CAN.
Comunicação CAN
No datasheet, você pode encontrar o diagrama de fiação para a interface CAN0/CAN1, conforme mostrado abaixo:

Aqui demonstraremos como realizar comunicação de dados usando a interface CAN1, utilizando o USB to CAN Analyzer Adapter.
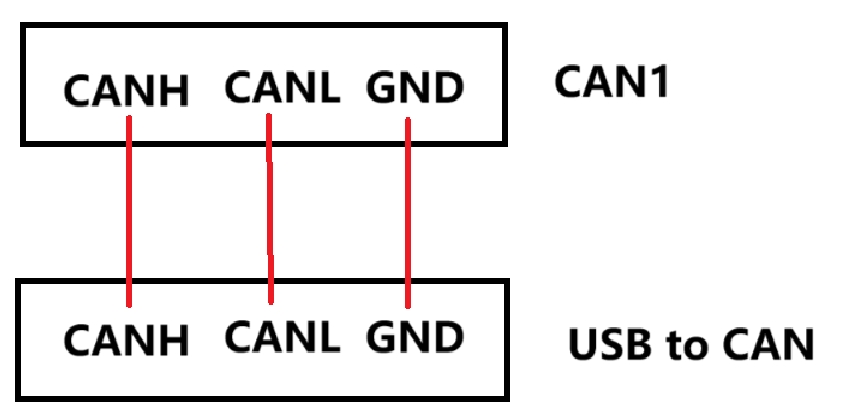
Conexão de Hardware
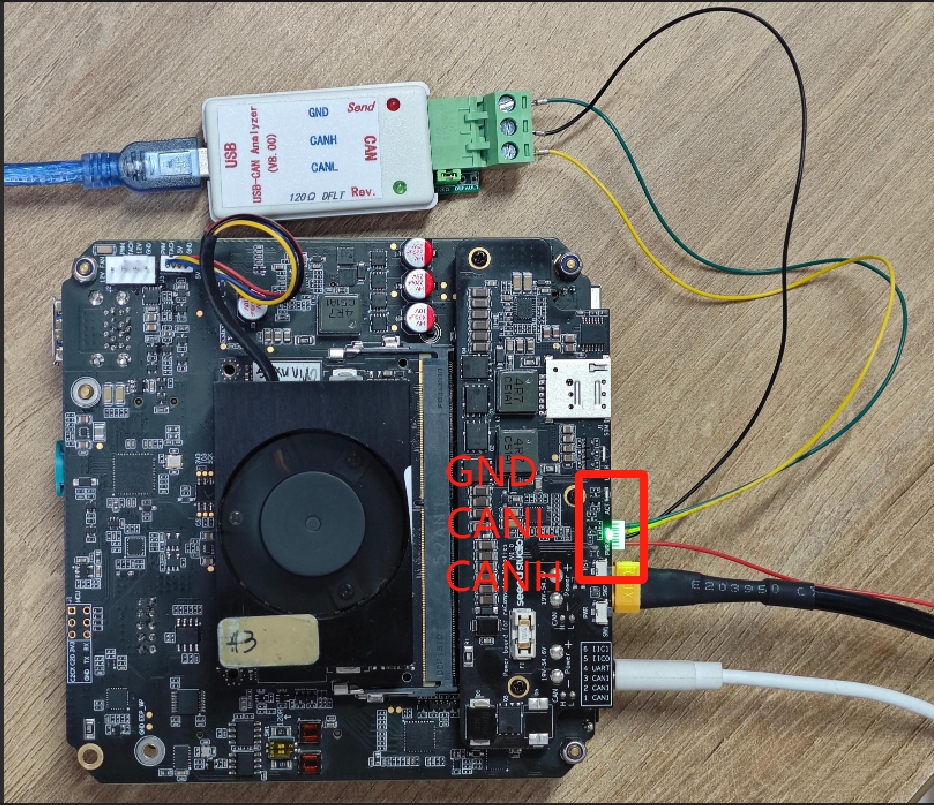
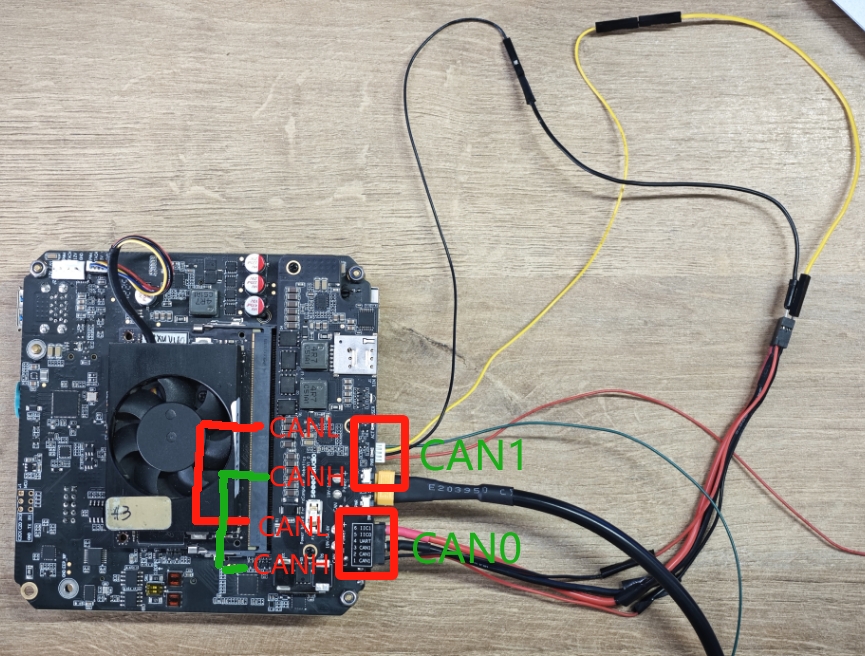
De acordo com o método de conexão mostrado na figura abaixo, conecte o CANL, CANH e GND do CAN1 às portas CANL, CANH e GND correspondentes da ferramenta USB para CAN, respectivamente.
No nosso caso, de acordo com o adaptador que usamos, baixamos e instalamos o software que pode ser encontrado aqui.
Passo 1. Configure a interface CAN1:
#Set the bit rate
sudo ip link set can1 type can bitrate 500000
#Enable CAN1
sudo ip link set can1 up
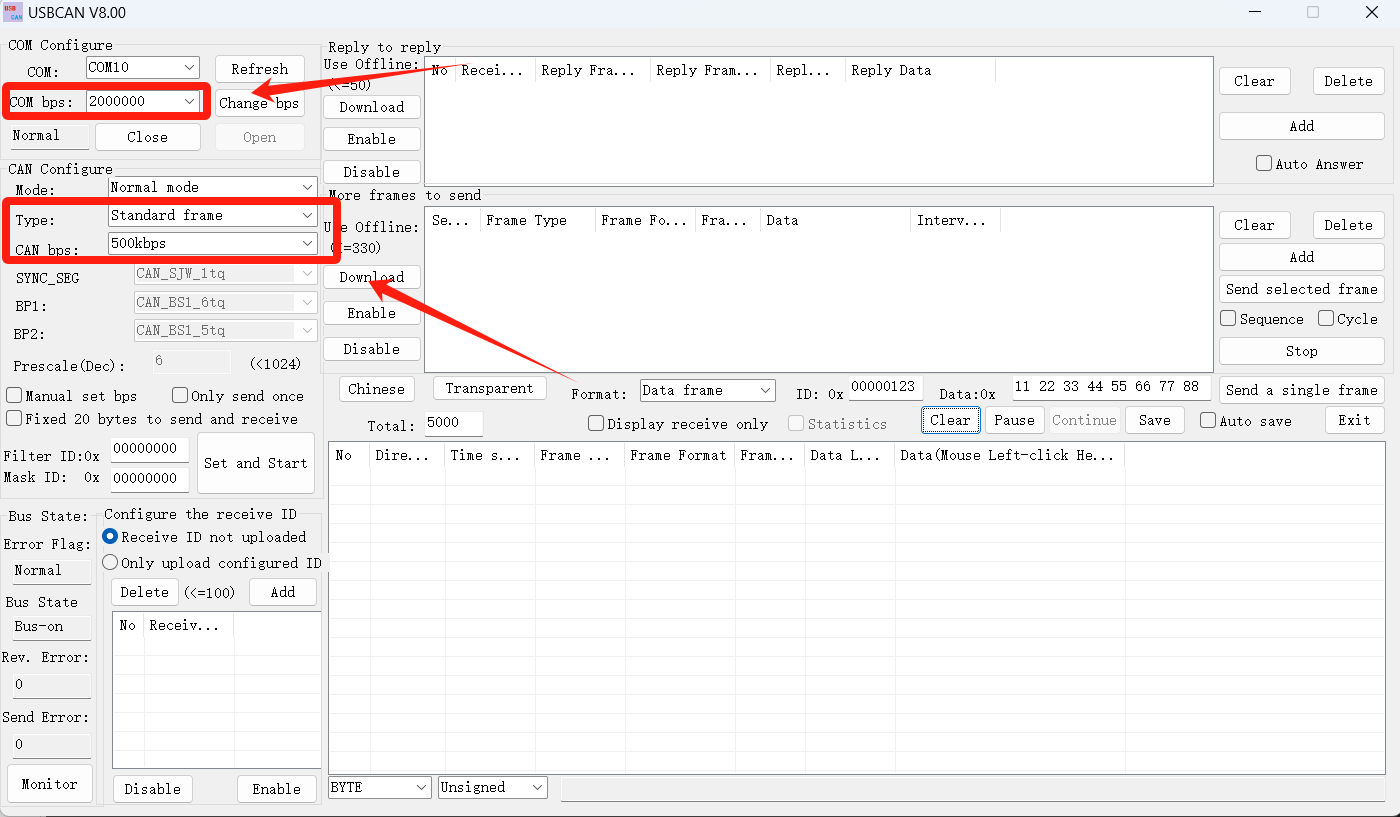
Passo 2. Configure o software de recebimento de dados no PC. Por favor, configure as definições de comunicação conforme mostrado na figura a seguir.
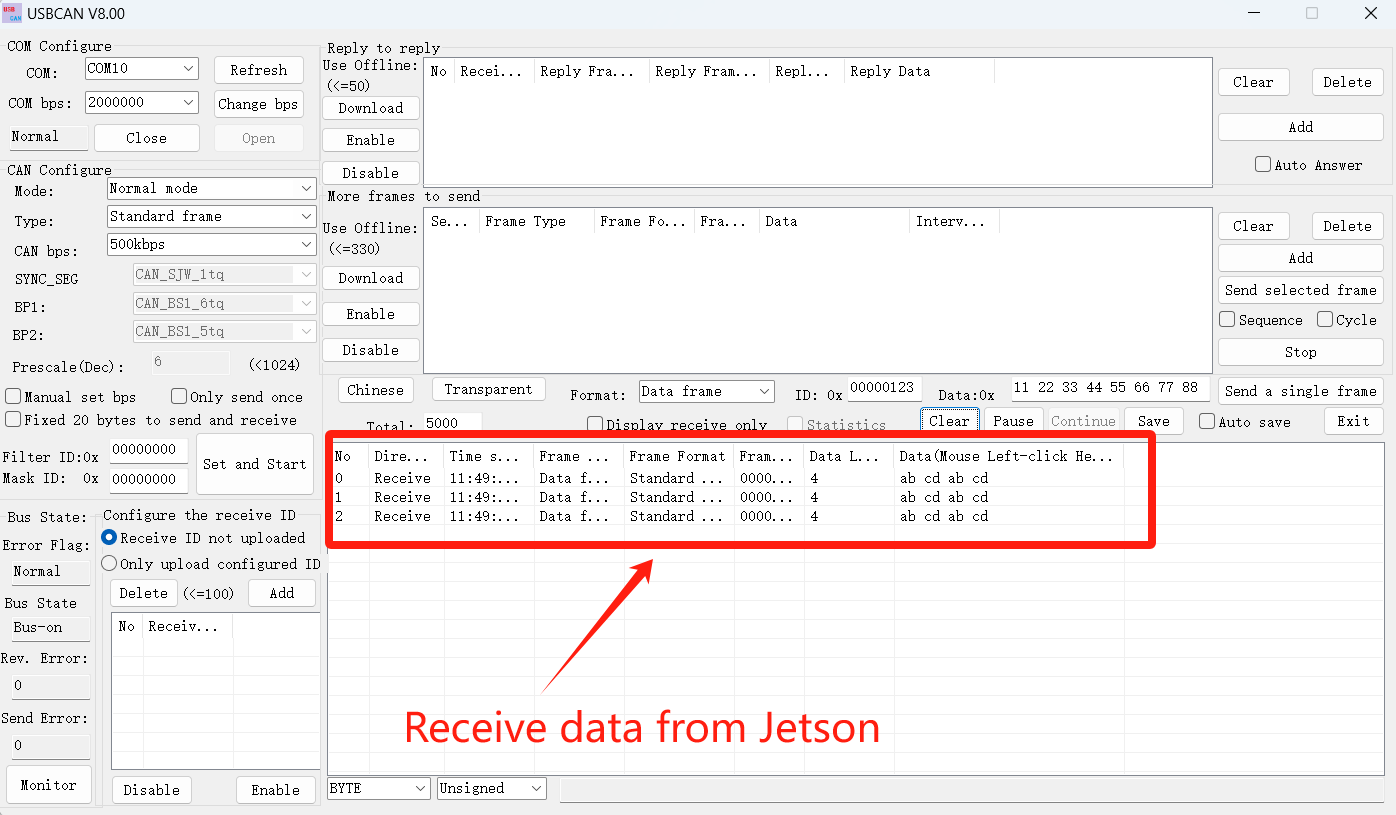
Passo 3. O Jetson envia dados para o PC:
cansend can1 123#abcdabcd
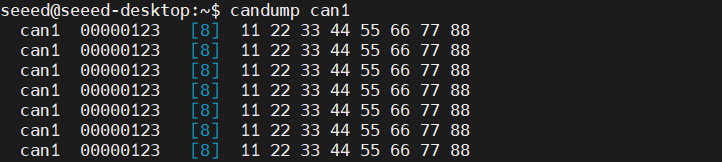
Passo 3. O PC envia dados para o Jetson:
#CAN1 monitors PC data
candump can1
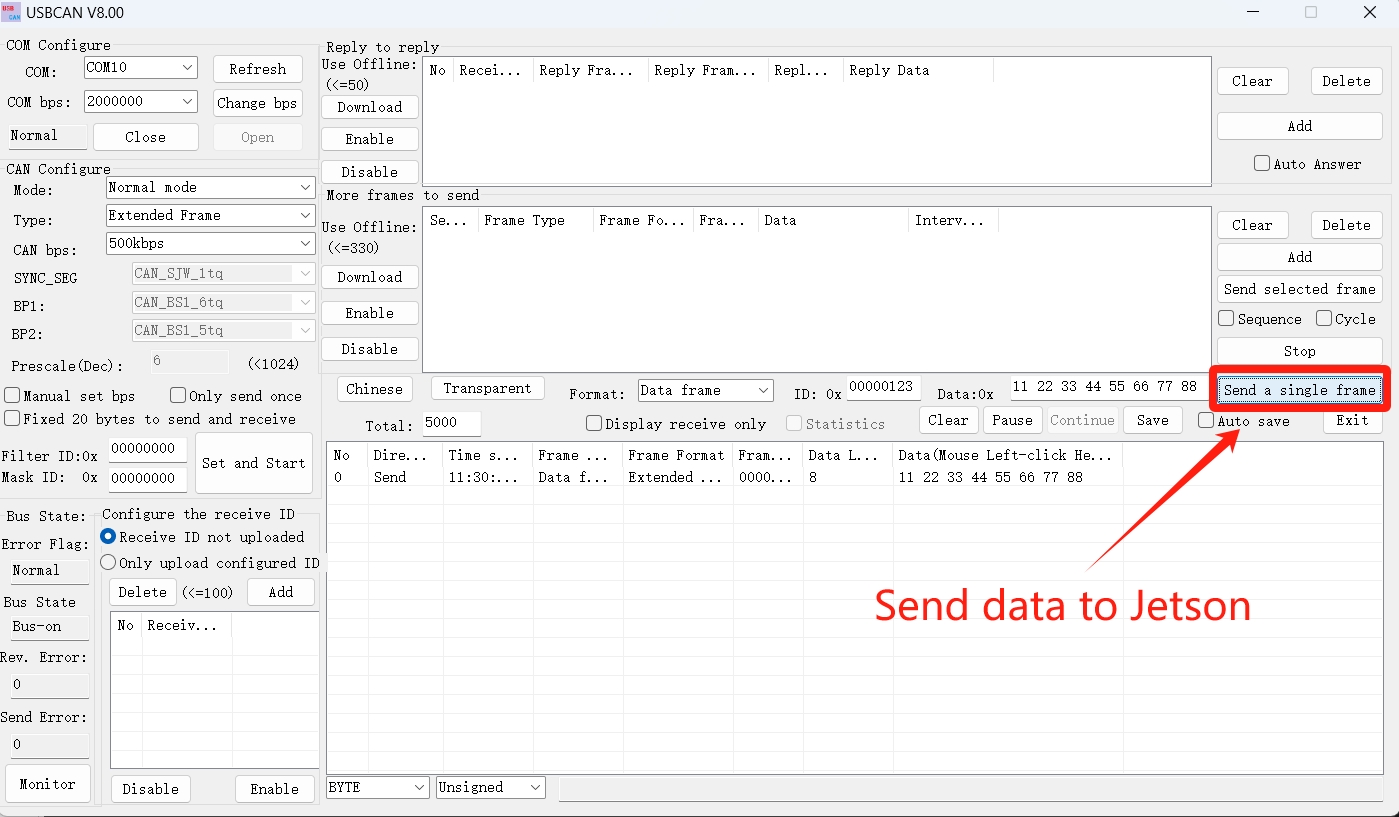
Pode-se ver que o terminal Jetson recebeu os dados enviados pelo PC.
Modo CAN FD
Aqui, utilizo o CAN0 para conectar ao CAN1 para demonstrar como vários dispositivos Jetson podem se comunicar via interface CAN.
Conexão de Hardware
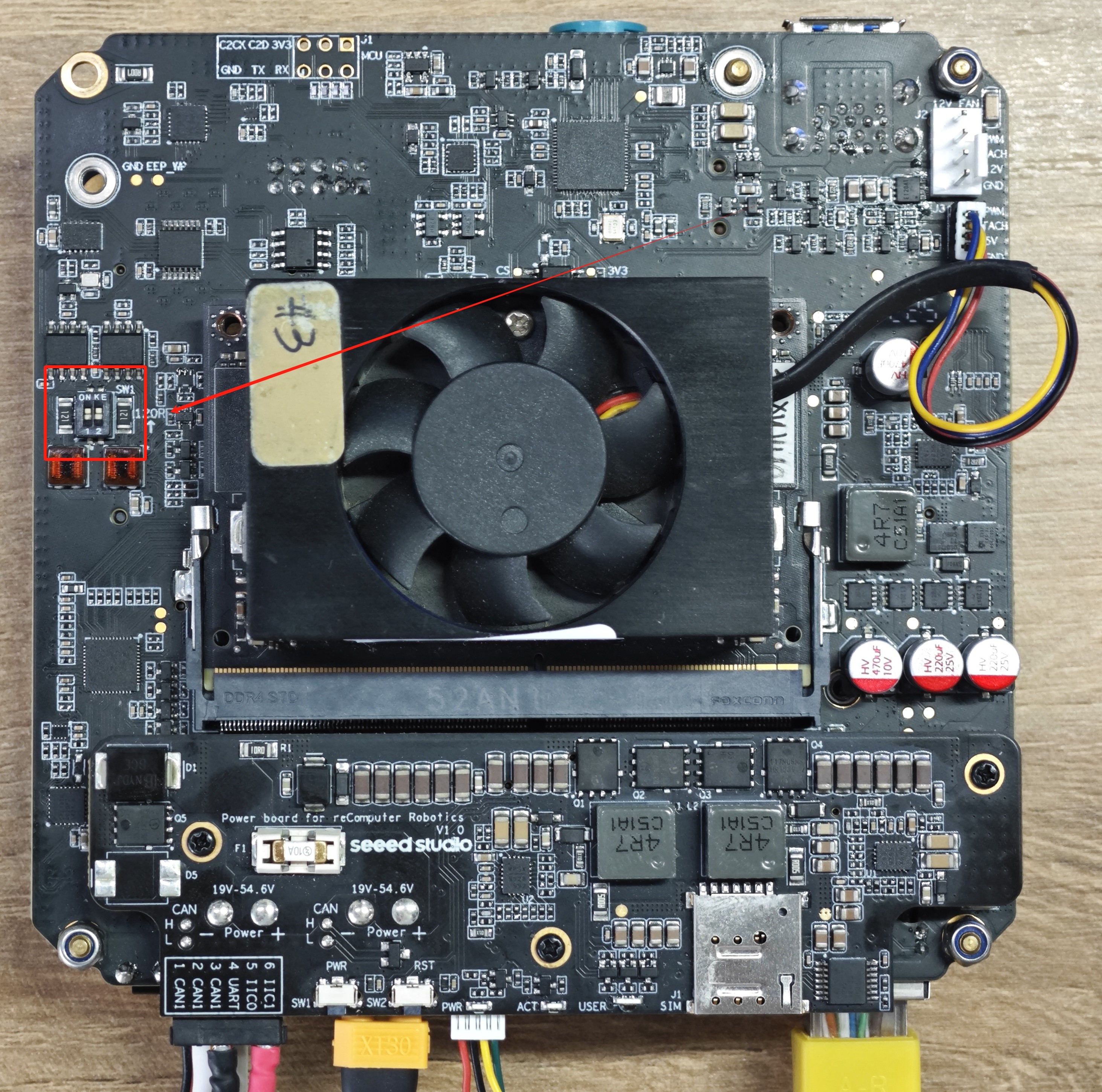
Passo 1. Remova a tampa inferior e coloque ambos os resistores de terminação de 120Ω na posição ON.
Passo 2. Configure as interfaces CAN0 e CAN1:
#close the interface
sudo ip link set can0 down
sudo ip link set can1 down
#Set to FD mode
sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 fd on
sudo ip link set can1 type can bitrate 500000 dbitrate 2000000 fd on
#open the interface
sudo ip link set can0 up
sudo ip link set can1 up
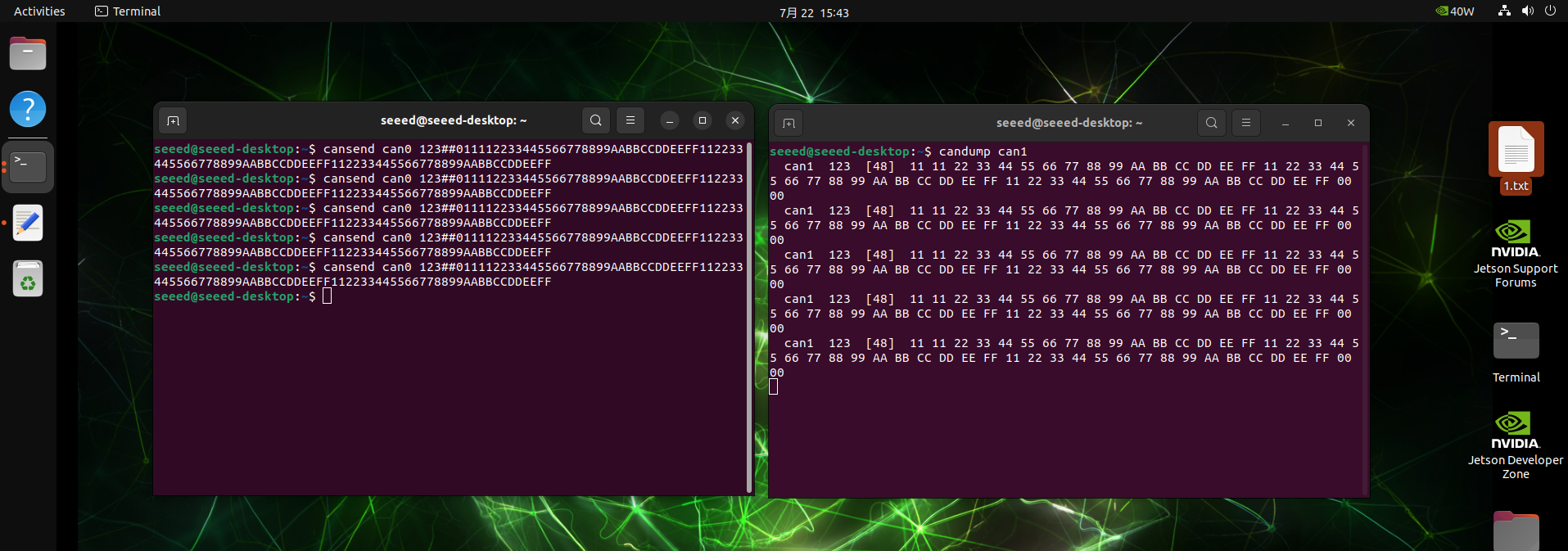
Passo 3. Abra um novo terminal para escutar o CAN1 e, via CAN0, envie dados para o CAN1:
#open a new terminal and run
candump can1
#another terminal sends data
cansend can0 123##011112233445566778899AABBCCDDEEFF112233445566778899AABBCCDDEEFF112233445566778899AABBCCDDEEFF
123é o ID##Indica quadro CAN FD- O seguinte é 64 bytes de dados (um total de 128 caracteres hexadecimais)
UART
O Robotics J401 fornece um conector JST padrão de 4 pinos para comunicação serial UART.
Conexão de Hardware
Para comunicação UART, siga a fiação a seguir. Aqui, usamos a ferramenta USB para TTL como exemplo.

Instruções de Uso
Passo 1. Abra o terminal no dispositivo Jetson e execute o seguinte comando para habilitar a interface UART:
gpioset --mode=time --sec=100 2 5=0
Passo 2. Conecte a ferramenta USB para TTL à porta UART do Robotics J401 e ao PC.
Passo 3. Abra a ferramenta de porta serial no lado do PC (aqui usamos a ferramenta xcom como exemplo) e defina a taxa de transmissão para 115200.
Passo 4. Crie um script Python simples para comunicação serial:
import serial
import time
ser = serial.Serial('/dev/ttyTHS1', 115200, timeout=1)
ser.write(b'Hello Jetson!\n')
while True:
if ser.in_waiting:
data = ser.readline()
print("get:", data.decode('utf-8').strip())
time.sleep(0.1)
ser.close()
Passo 5. Execute o script em Python no dispositivo Jetson:
python3 uart_test.py
Passo 6. Agora você pode ver a saída no PC, e também pode enviar dados do PC para o dispositivo Jetson:


I2C
O Robotics J401 fornece duas interfaces I2C (IIC0 e IIC1) por meio de conectores padrão JST de 4 pinos. Permite a fácil conexão de sensores e periféricos para expansão do sistema.
Conexão de Hardware
O Robotics J401 possui duas interfaces IIC GH-1.25 de 4 pinos, IIC0 e IIC1.
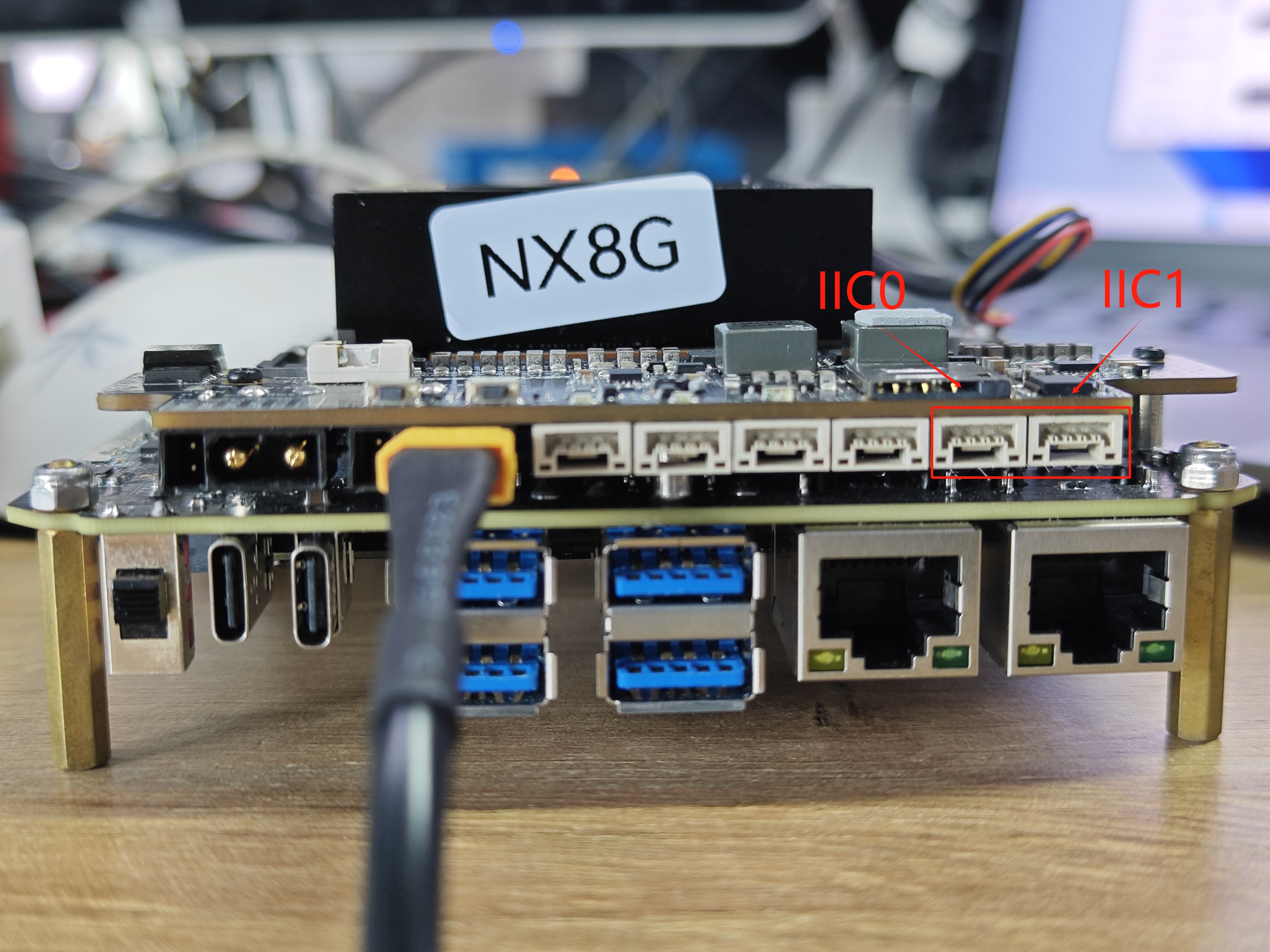
No datasheet, você pode encontrar o diagrama de fiação para a interface IIC0/IIC1 GH-1.25 de 4 pinos, como mostrado abaixo:

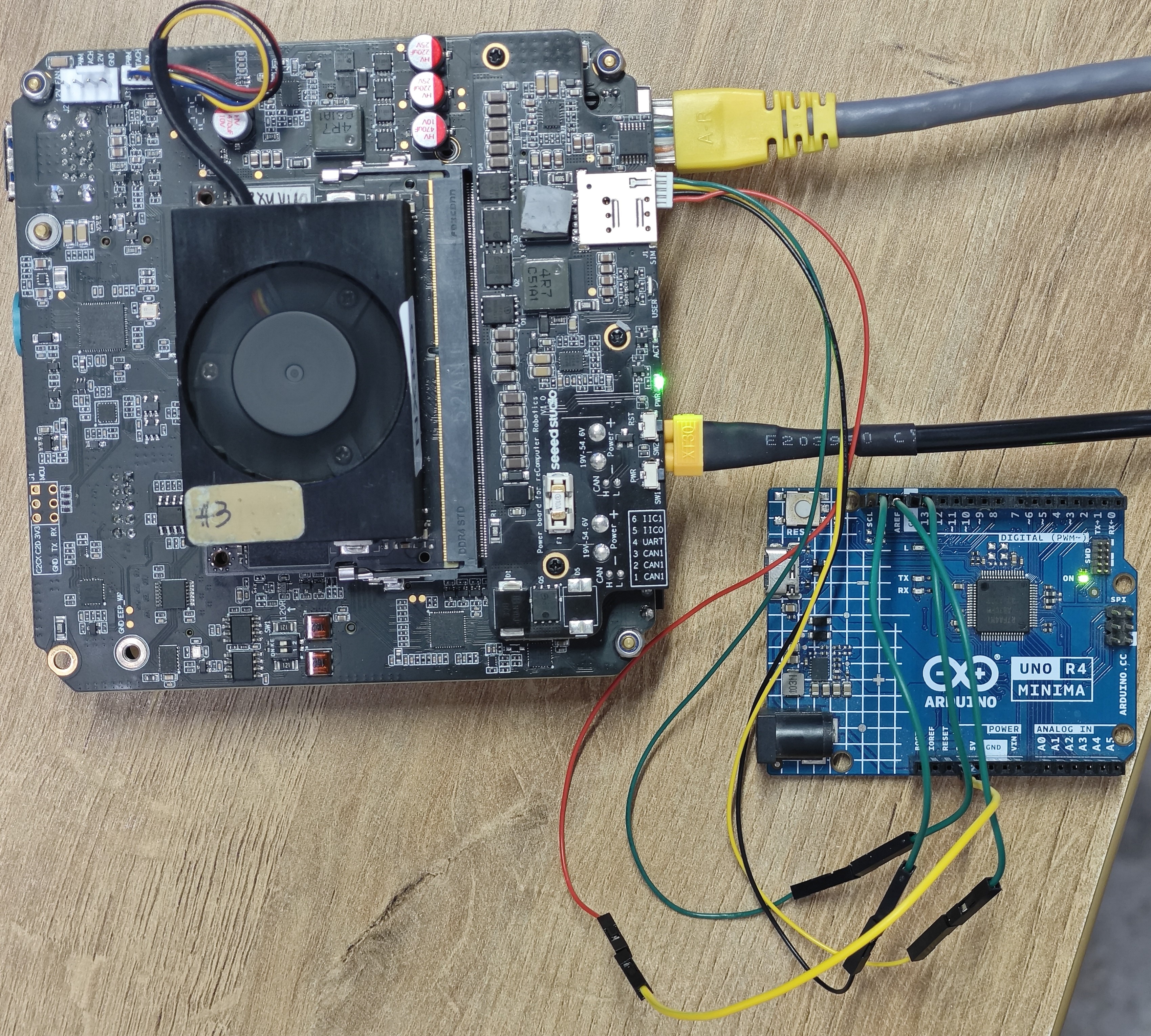
Selecione um dispositivo de interface IIC para teste; a escolha é sua. Aqui, usamos um Arduino-Uno-Rev4-Minima para testar I2C0/I2C1.
O processo de teste aqui envolve a varredura dos endereços dos dispositivos conectados externamente em IIC0/IIC1.
Conecte os dispositivos (IIC0/IIC1 ↔ Dispositivo) de acordo com as seguintes conexões:
-
Alimentação → Alimentação
-
SDA → SDA
-
SCL → SCL
-
Terra → Terra
Instruções de Uso
Passo 1. Baixe o Arduino IDE para enviar o código.
Passo 2. Selecione o tipo de placa de desenvolvimento.
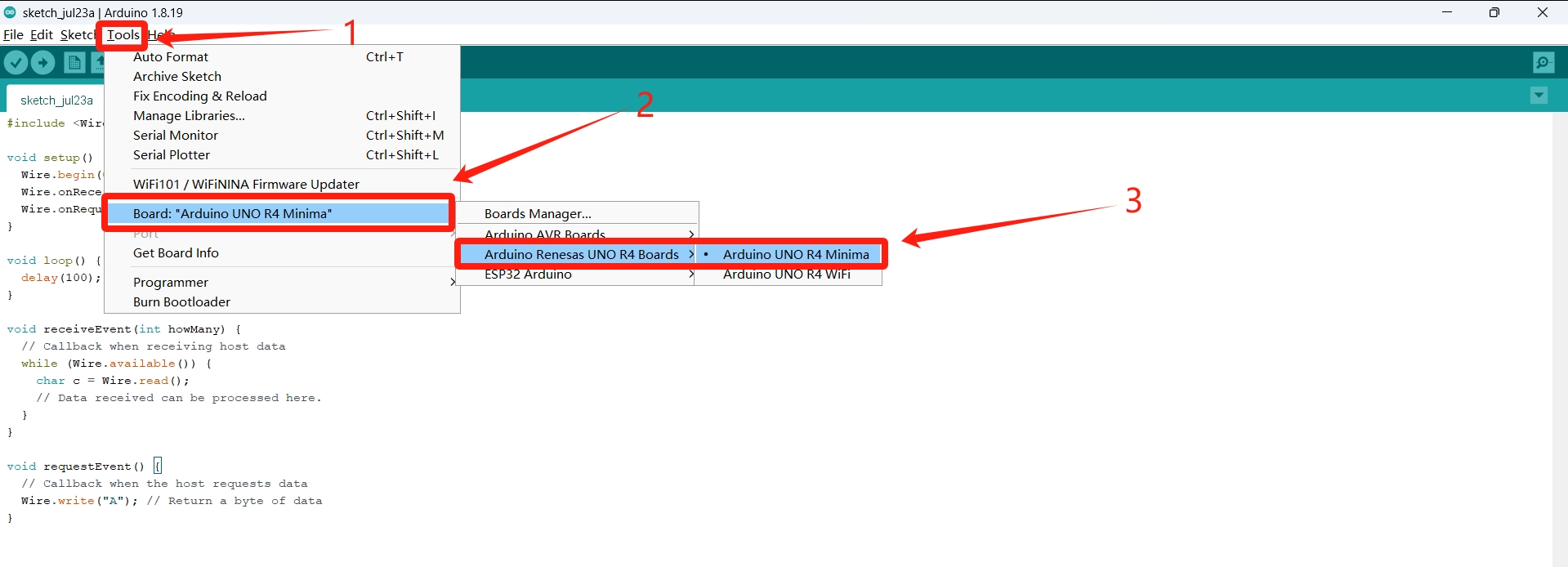
Passo 3. Reinicie o IDE e envie o seu código.
#code example
#include <Wire.h>
void setup() {
Wire.begin(0x08); // Set the I2C slave address to 0x08
Wire.onReceive(receiveEvent);
Wire.onRequest(requestEvent);
}
void loop() {
delay(100);
}
void receiveEvent(int howMany) {
// Callback when receiving host data
while (Wire.available()) {
char c = Wire.read();
// Data received can be processed here.
}
}
void requestEvent() {
// Callback when the host requests data
Wire.write("A"); // Return a byte of data
}
Passo 4. No Jetson, instale as ferramentas para teste de IIC.
sudo apt update
sudo apt-get install i2c-tools
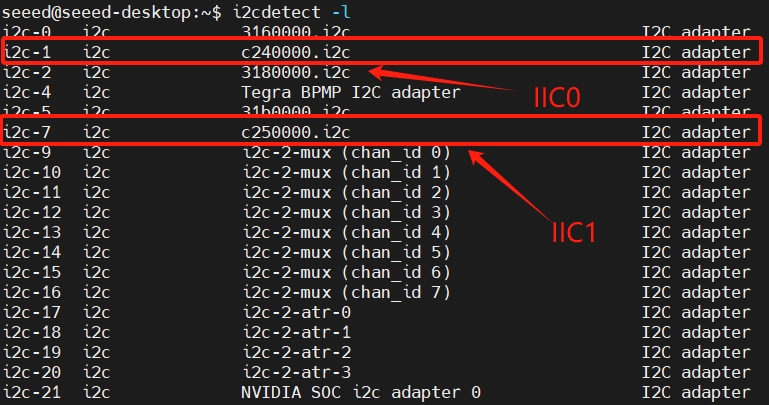
Passo 5. Execute o seguinte comando no terminal para visualizar os nomes mapeados no barramento IIC:
i2cdetect -l
Passo 6. Execute os seguintes comandos para fazer a varredura em IIC0:
sudo i2cdetect -y -r 1
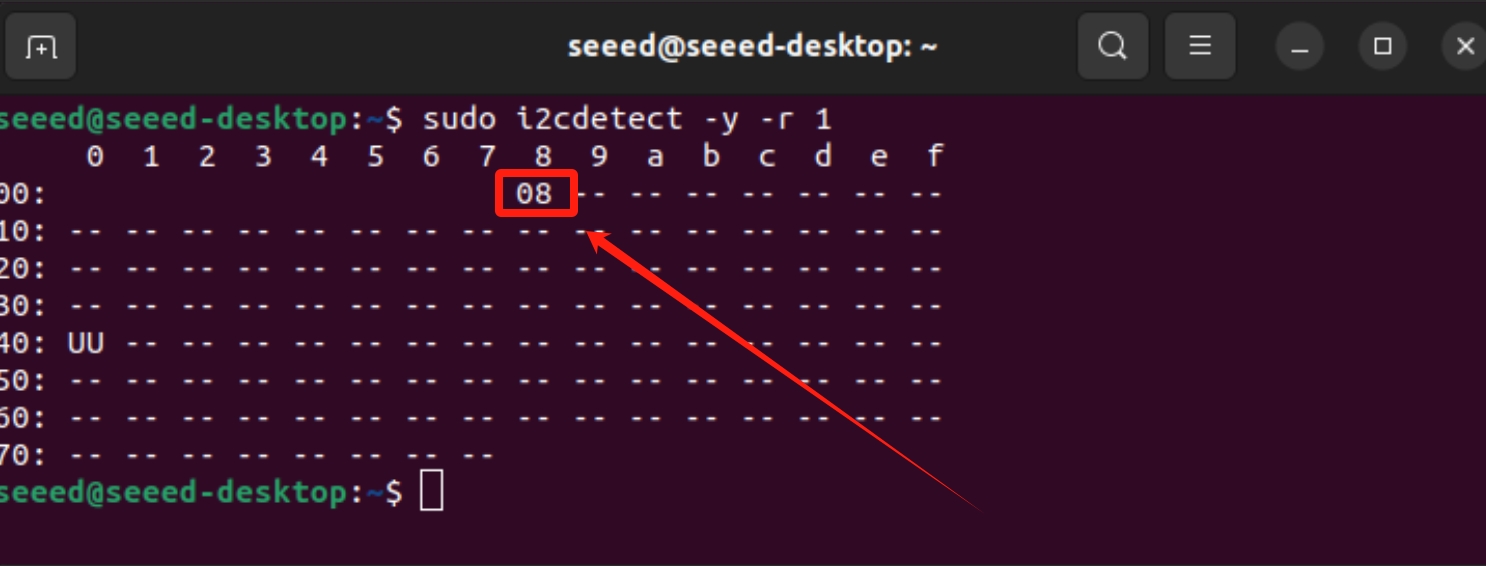
Podemos ver que o dispositivo conectado a IIC0 está configurado para o endereço 0x08.
Porta de Extensão
A placa carrier Robotics j401 possui um conector de expansão de câmera para placa de extensão GMSL. Ela pode conectar e operar simultaneamente quatro câmeras GMSL ao mesmo tempo.
Conexão de Hardware
Aqui estão os slots de conexão da placa de expansão de câmera GMSL da placa carrier Robotics j401 (é necessário preparar uma placa de extensão com antecedência):

A seguir estão os modelos de câmeras GMSL que já suportamos:
- SG3S-ISX031C-GMSL2F
- SG2-AR0233C-5200-G2A
- SG2-IMX390C-5200-G2A
- SG8S-AR0820C-5300-G2A
- Orbbec Gemini 335Lg
Instruções de Uso
Antes de habilitar a funcionalidade GMSL, certifique-se de ter instalado uma versão do JetPack com o driver da placa de expansão GMSL.
Configurar o arquivo Jetson IO
sudo /opt/nvidia/jetson-io/jetson-io.py
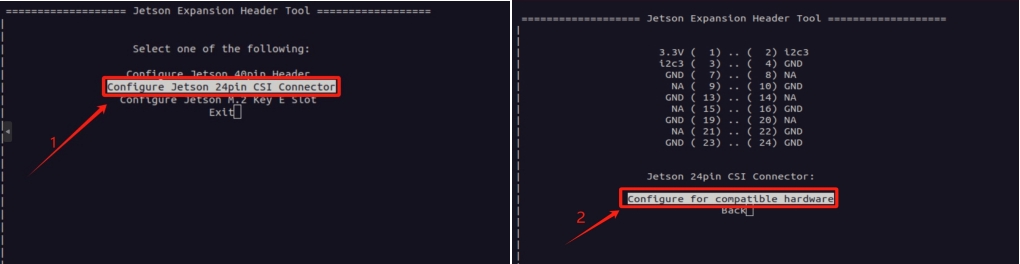
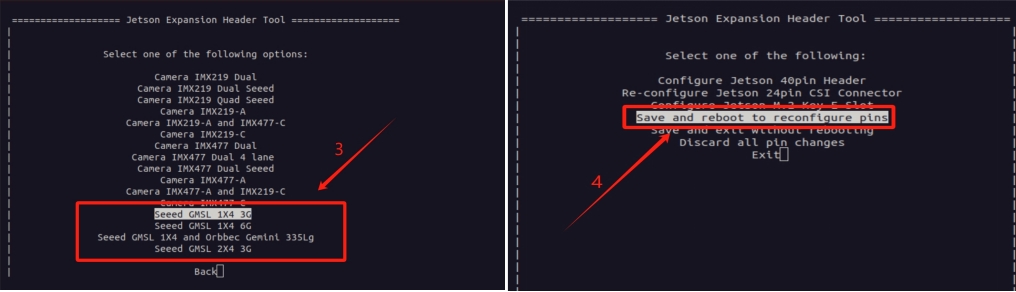
Existem três arquivos de overlay no total, a saber, Seeed GMSL 1X4 3G, Seeed GMSL 1X4 6G, Seeed GMSL 1X4 e Orbbec Gemini 335Lg. Estes correspondem, respectivamente, à câmera 3G do SG3S, à câmera 6G do SG2 e SG8S e à câmera da Orbbec. Como mostrado na Figura 3, configure o arquivo io de acordo com o modelo da sua câmera.
Passo 2. Instale as ferramentas de configuração da interface de vídeo.
sudo apt update
sudo apt install v4l-utils
Usar a câmera Gemini 335Lg
#Download the Orbbec Gemini 335Lg visualization tool
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
#unzip and run the UI tool
unzip OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
cd OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64
./OrbbecViewer
Na primeira vez que você ligá-la, talvez seja necessário atualizar o firmware.
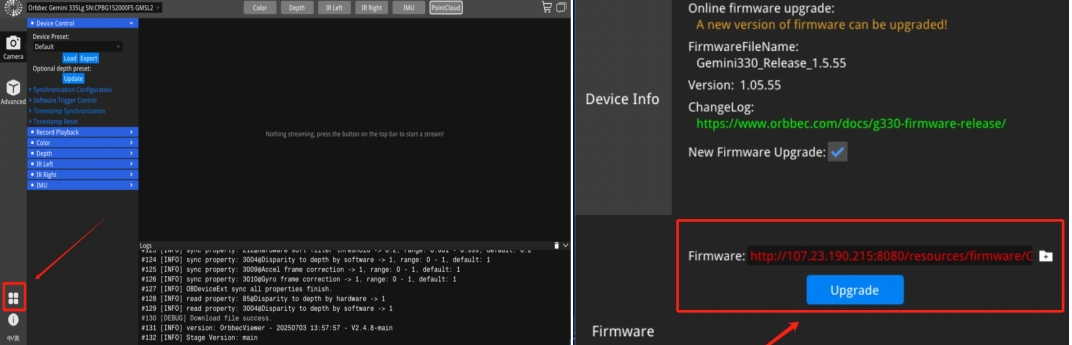
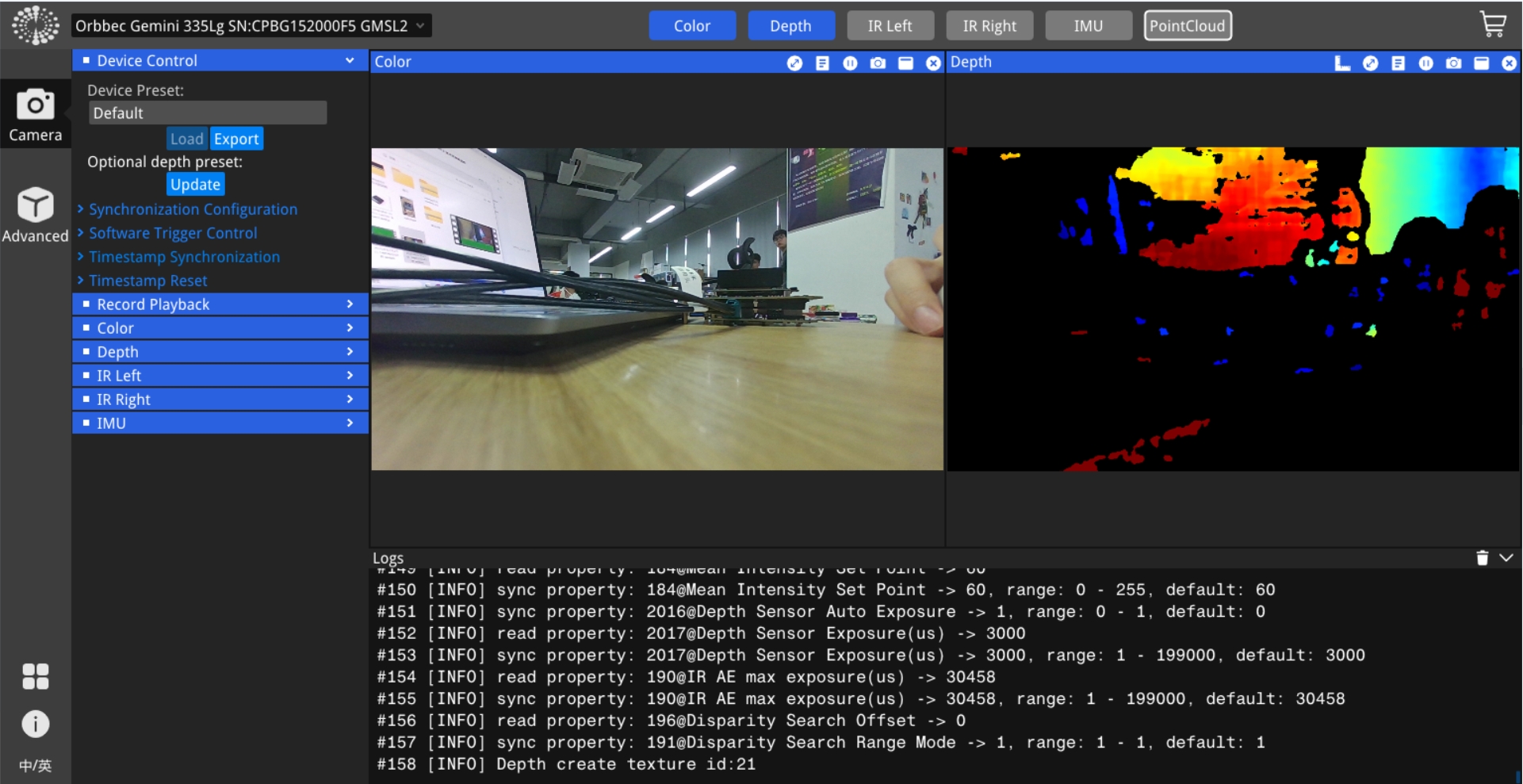
Ao abrir o fluxo de dados, você pode visualizar o vídeo da câmera.
Usar as câmeras da Série SGxxx
Passo 1. Defina o modo de sincronização de quadros (não está habilitado por padrão!).
Aqui demonstramos como configurar câmeras de diferentes modelos e resoluções.
#enables frame synchronization
v4l2-ctl -d /dev/video0 --set-ctrl=trig_mode=1
#Set the frame rate of the camera
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 --stream-mmap -d /dev/video0
#Set the camera format
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video0
trig_mode = 1 habilita a sincronização de quadros, enquanto trig_mode = 0 desabilita a sincronização de quadros. A configuração padrão é desabilitar a sincronização de quadros.
--set-fmt-video segue a resolução que é selecionada com base na câmera conectada. Atualmente, há três opções de sensor_mode, cada uma correspondendo a uma resolução diferente.
- sensor_mode=0 -------> YUYV8_1X16/1920x1536
- sensor_mode=1 -------> YUYV8_1X16/1920x1080
- sensor_mode=2 -------> YUYV8_1X16/3840x2160
Passo 2. Inicie a câmera.
gst-launch-1.0 \
v4l2src device=/dev/video0 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video1 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video2 ! \
video/x-raw,format=YUY2,width=1536,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video3 ! \
video/x-raw,format=YUY2,width=3840,height=2160,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
Display
O reComputer Jetson Robotics J401 está equipado com uma DP1.4 (incluída no Type-C Host) para saída de exibição em alta resolução.
Recursos
- Esquema da Placa Carrier reComputer Robotics J401
- Datasheet da Placa Carrier reComputer Robotics J401
- Arquivo 3D do reComputer Robotics
- Documento Mecânico - reComputer Robotics PCBA
- Catálogo de Produtos Seeed NVIDIA Jetson
- Comparação Nvidia Jetson
- Casos de Sucesso Seeed Nvidia Jetson
- Seeed Jetson One Pager
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.