reComputer Super Uso de Hardware e Interfaces

Este wiki apresenta os diversos hardwares e interfaces do reComputer Super e como usá-los para expandir suas ideias de projetos.
Câmera CSI
O reComputer Super suporta 4 câmeras MIPI CSI padrão para captura de imagem e vídeo. Siga as etapas abaixo para conectar e testar sua câmera.
Conexão de Hardware

Passo 1. Abra a tampa traseira do reComputer Super.
Passo 2. Conecte a câmera MIPI CSI à porta CSI apropriada na placa do reComputer Super.
Passo 3. Fixe a câmera e certifique-se de que a conexão esteja firme.
Instruções de Uso
Antes de usar a câmera CSI, certifique-se de que você instalou uma versão do JetPack com os drivers de câmera necessários.
Passo 1. Verifique se a câmera foi reconhecida pelo sistema:
ls /dev/video*
Passo 2. (Opcional) Instale utilitários de vídeo se ainda não estiverem presentes:
sudo apt install v4l-utils
Passo 3. Inicie a câmera e exiba o fluxo de vídeo usando o seguinte comando:
nvgstcapture-1.0 --sensor-id=0
Altere --sensor-id para o valor apropriado se você tiver várias câmeras.

USB
O reComputer Super possui um total de 4 portas USB 3.2 e 1 porta USB 2.0 Type-C para depuração.
Porta USB 3.2
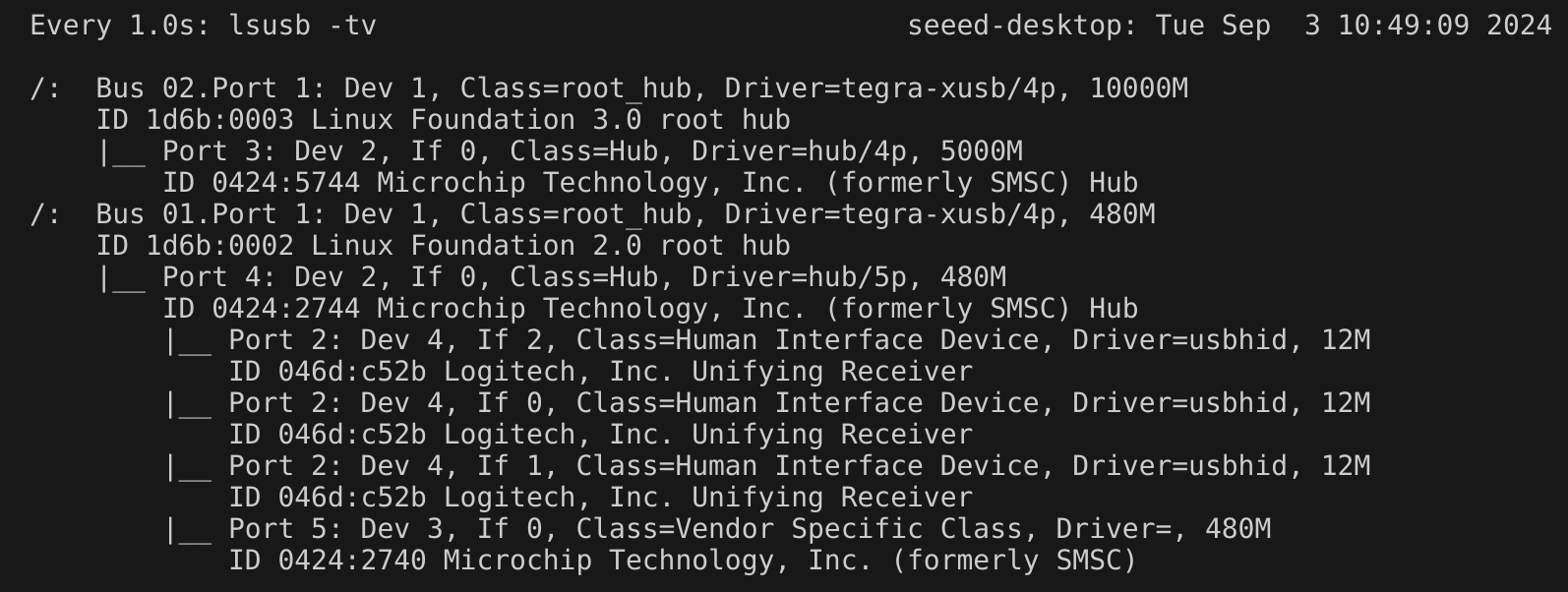
Podemos inserir watch -n 1 lsusb -tv no terminal do Jetson para sondar as portas USB. Quando um dispositivo USB for conectado, as informações detalhadas sobre essa porta serão exibidas aqui.
Além disso, você pode testar a velocidade de leitura e gravação de dispositivos de armazenamento USB usando o comando dd:
-
Leitura:
sudo dd if=/dev/sda of=/dev/null bs=1024M count=5 iflag=direct

-
Gravação:
sudo dd if=/dev/zero of=/dev/sda bs=1024M count=5 conv=fdatasync

Porta USB 2.0 Type-C
Usando esta porta serial, através do cabo de dados USB C, você pode monitorar no PC as informações de depuração de entrada e saída.
Passo 1. Coloque a chave na posição de modo de depuração.

Passo 2. Conecte o PC por meio de um cabo de dados USB, faça o download do CP210X Driver no seu PC.

Passo 3. Conecte o PC por meio de um cabo de dados USB, extraia o arquivo baixado e instale o driver no seu PC.

Passo 4. Abra o Gerenciador de Dispositivos no seu PC com Windows e verifique o número da porta COM atribuída ao reComputer Super. Ele deve aparecer em "Ports (COM & LPT)" como "Silicon Labs CP210x USB to UART Bridge (COMX)", onde X é o número da porta COM.

Passo 5. Abra a ferramenta de porta serial (aqui usamos a ferramenta MobaXterm como exemplo), crie uma nova sessão.

Passo 6. Selecione a ferramenta Serial.

Passo 7. Selecione a porta serial correspondente, defina a taxa de baud para 115200 e clique em "OK".

Passo 8. Faça login no seu reComputer Super com o nome de usuário e senha.

M.2 Key M
M.2 Key M é uma interface projetada para unidades de estado sólido (SSDs) de alta velocidade, fornecendo velocidades de transferência de dados ultrarrápidas, ideal para aplicações de alto desempenho.
SSDs compatíveis são os seguintes
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
Conexão de Hardware

Instruções de Uso
Abra o terminal no dispositivo Jetson e insira o seguinte comando para testar a velocidade de leitura e gravação do SSD.
#create a blank test file first
sudo touch /ssd/test
dd if=/dev/zero of=/home/seeed/ssd/test bs=1024M count=5 conv=fdatasync

Execute o comando sudo rm /home/seeed/ssd/test para excluir os arquivos de cache após a conclusão do teste.
M.2 Key E
A interface M.2 Key E é uma interface de dados compacta e de alta velocidade projetada para módulos de comunicação sem fio, como Wi-Fi e Bluetooth, usada para expandir as capacidades sem fio.
Conexão de Hardware

Instruções de Uso
Após instalar o módulo Wi-Fi e ligar o dispositivo, podemos configurar as configurações de Wi-Fi e Bluetooth do dispositivo.
Claro, também podemos verificar o status de operação do dispositivo usando os seguintes comandos.
ifconfig

Bluetooth:
bluetoothctl
scan on
Mini PCIe
O reComputer Super vem com um mini-PCIe para módulo LTE 4G.
Conexão de Hardware

Se você quiser remover o cartão SIM, empurre o cartão para dentro para acionar a mola interna para que o SIM saia do slot
Instruções de Uso
Passo 1. Instale o minicom:
sudo apt update
sudo apt install minicom -y
Passo 2. Entre no console serial do módulo 4G conectado para que possamos inserir comandos AT e interagir com o módulo 4G:
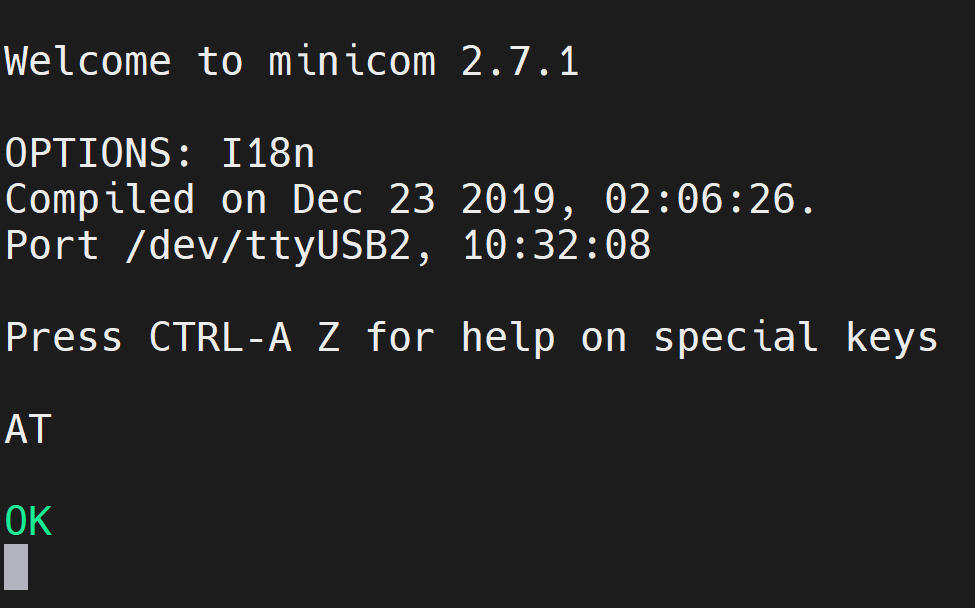
sudo minicom -D /dev/ttyUSB2 -b 115200
Passo 3. Pressione Ctrl+A e depois pressione E para ativar o eco local.
Passo 4. Insira o comando "AT" e pressione Enter. Se você vir a resposta "OK", o módulo 4G está funcionando corretamente.
Passo 5. Insira o comando "ATI" para verificar as informações do módulo.
Usando a rede 4G para acesso à internet

RTC
O reComputer Super possui interfaces RTC, fornecendo medição de tempo precisa mesmo quando o sistema está desligado.
Conexão de Hardware
Conecte uma bateria tipo moeda CR1225 de 3 V ao soquete RTC na placa, como mostrado abaixo. Certifique-se de que o terminal positivo (+) da bateria esteja voltado para cima.

Instruções de Uso
Passo 1. Conecte uma bateria RTC conforme mencionado acima.
Passo 2. Ligue o reComputer Super.
Passo 3. No Ubuntu Desktop, clique no menu suspenso no canto superior direito, navegue até Settings > Date & Time, conecte-se a uma rede via cabo Ethernet e selecione Automatic Date & Time para obter a data/hora automaticamente.

Se você não tiver se conectado à internet via Ethernet, você pode definir manualmente a data/hora aqui.
Passo 4. Abra uma janela de terminal e execute o comando abaixo para verificar a hora do relógio de hardware:
cat /sys/devices/platform/bpmp/bpmp\:i2c/i2c-4/4-003c/nvvrs-pseq-rtc/rtc/rtc0/time
.png)
Passo 5. Desconecte a conexão de rede e reinicie o dispositivo. Você verá que o horário do sistema perdeu a alimentação, mas ainda funciona normalmente.

Ethernet
Há 2 portas Ethernet Gigabit RJ45 no reComputer Super com suporte a 10/100/1000M. ETH0 é a porta Ethernet nativa e a outra, ETH1, é convertida a partir de PCIe.

Há 2 LEDs (verde e amarelo) em cada porta Ethernet:
- LED verde: LIGADO apenas quando conectado a uma rede de 1000M/10G.
- LED amarelo: Mostra o status de atividade da rede.
Teste a velocidade da Ethernet:
iperf3 -c 192.168.254.100 -R
-c <ip address> é o endereço IP do servidor, e -R significa modo reverso.

iperf3 -c 192.168.254.100

Indicadores LED
O reComputer Super está equipado com 2 indicadores LED (PWR e ACT) para mostrar o status de alimentação e a atividade do sistema, permitindo que os usuários monitorem a operação do dispositivo em tempo real.

Ventoinha
O reComputer Super está equipado com dois tipos de conectores de ventoinha para atender diferentes necessidades de tensão e resfriamento:
-
1x Conector de Ventoinha de 4 Pinos (5V PWM): Projetado para ventoinhas silenciosas de baixa tensão e baixa potência, esse conector suporta controle de velocidade PWM, permitindo o ajuste inteligente da velocidade da ventoinha com base na temperatura do sistema para melhorar a eficiência energética e reduzir o ruído.
-
1x Conector de Ventoinha de 4 Pinos (12V PWM): Compatível com ventoinhas PWM padrão de 12V, também suporta controle preciso de velocidade, sendo ideal para requisitos de resfriamento de alto desempenho.
Conexão de Hardware

Para mais informações, verifique aqui.
Definir velocidade da ventoinha:
sudo -i
echo 100 > /sys/bus/platform/devices/pwm-fan/hwmon/hwmon1/pwm1
Além disso, podemos definir manualmente a velocidade da ventoinha usando a ferramenta jtop.
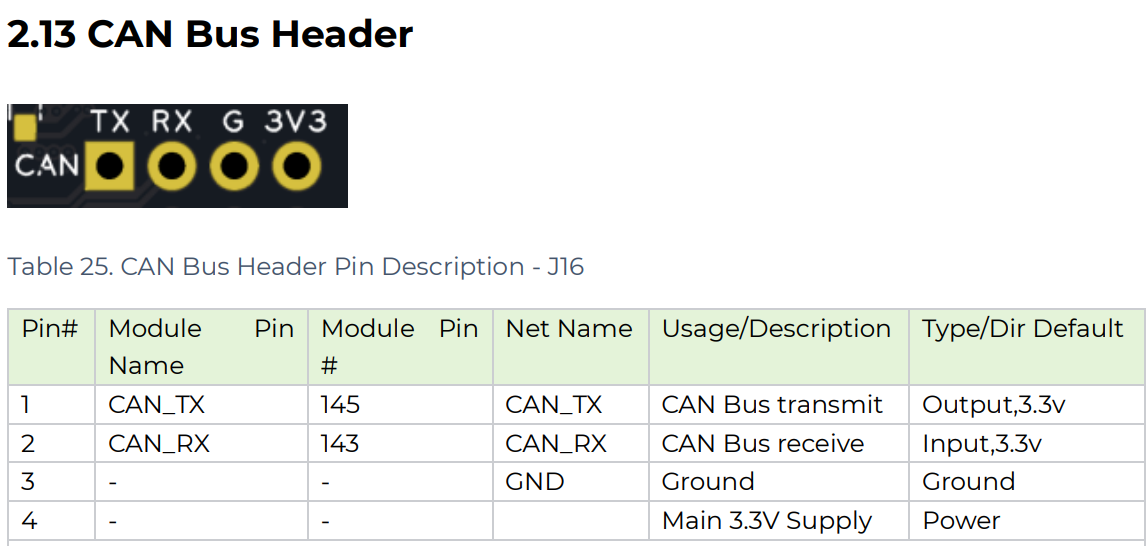
CAN
A série reComputer Super fornece uma interface CAN em que o sinal CAN é enviado diretamente do SOM em níveis TTL/CMOS, que é um sinal diferencial não padronizado, exigindo um transceptor CAN externo para se conectar a um barramento CAN padrão; ela suporta formatos de quadro CAN FD, permitindo comprimento de dados estendido e taxas de dados mais altas, tornando-a adequada para automação industrial, robótica, prototipagem automotiva e outras aplicações que exigem comunicação confiável e em tempo real.
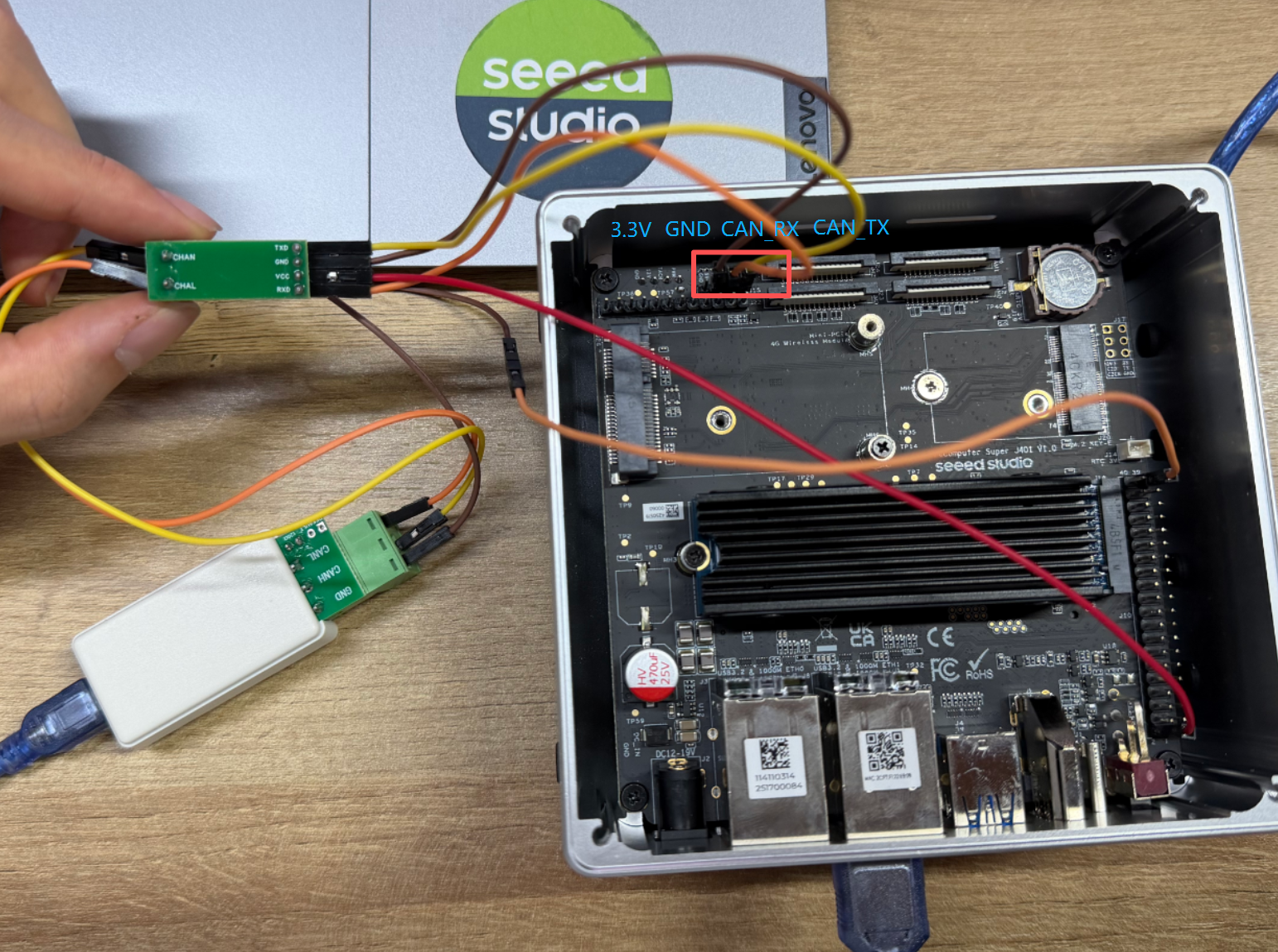
Conexão de Hardware
Observe a sequência das linhas conectadas (R OUT ↔ RX, D IN ↔ TX) e, em seguida, converta-as para CAN_L e CAN_H por meio do transceptor de barramento CAN.

De acordo com o Datasheet do reComputer Super, conecte o aquecedor CAN ao transceptor de barramento CAN da maneira correspondente, depois conecte o transceptor de barramento CAN ao Adaptador USB para Analisador CAN e, por fim, conecte-o ao Jetson para teste de comunicação em loopback.
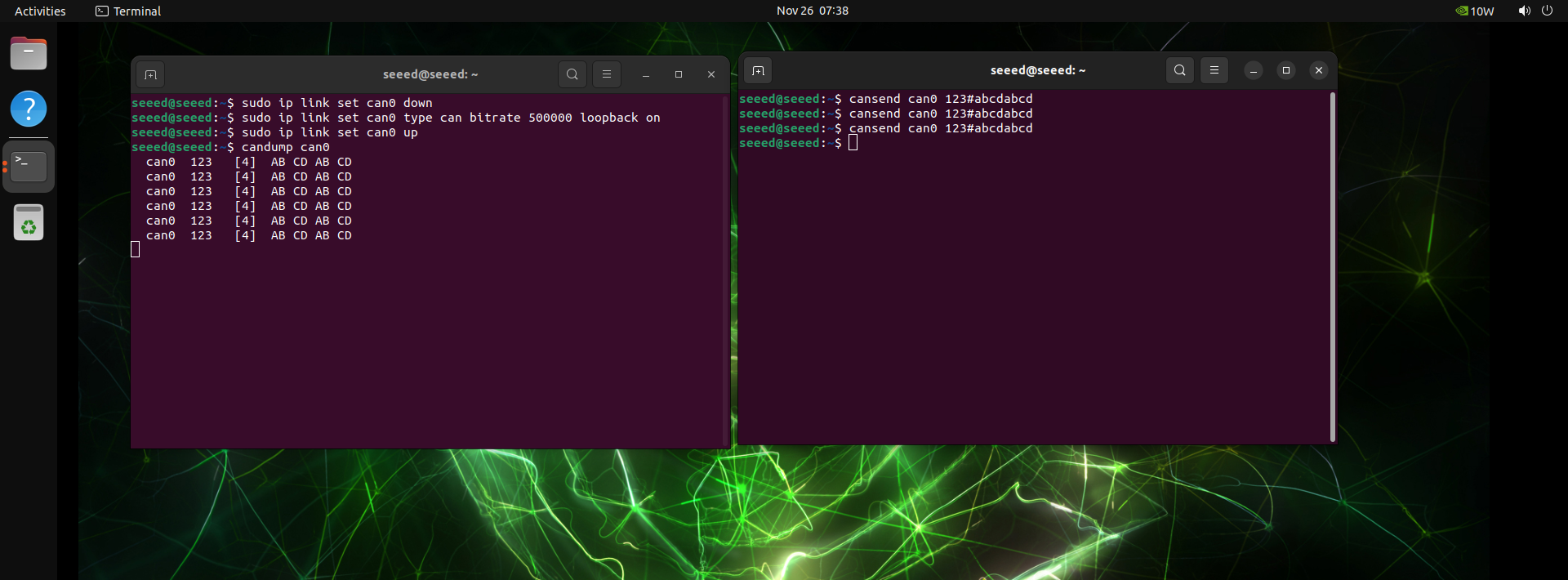
Instruções de Uso
Passo 1. Configure e abra can0:
sudo ip link set can0 down
sudo ip link set can0 type can bitrate 500000
sudo ip link set can0 up
Passo 2. Teste de comunicação. Abra um terminal para receber sinais.
candump can0
Passo 3. Abra outro terminal para enviar o sinal.
cansend can0 123#abcdabcd
Porta de Extensão
A Porta de Extensão inclui um cabeçalho de extensão de 40 pinos e um cabeçalho de controle e UART de 12 pinos, fornecendo opções versáteis de conectividade para periféricos e interfaces de comunicação.
Cabeçalho de Extensão de 40 Pinos

O Cabeçalho de Extensão de 40 Pinos é uma interface de expansão versátil que fornece várias funções, como GPIO, I2C, SPI e UART, facilitando a conexão de sensores, periféricos ou outros módulos.
O detalhe do cabeçalho de 40 pinos é mostrado abaixo:
| Pino do Cabeçalho | Sinal | Pino BGA | Função Padrão |
|---|---|---|---|
| 1 | 3.3V | - | Fonte principal de 3,3V |
| 2 | 5V | - | Fonte principal de 5V |
| 3 | I2C1_SDA | PDD.02 | Dados I2C #1 |
| 4 | 5V | - | Fonte principal de 5V |
| 5 | I2C1_SCL | PDD.01 | Clock I2C #1 |
| 6 | GND | - | Terra |
| 7 | GPIO09 | PAC.06 | Entrada/Saída de Uso Geral |
| 8 | UART1_TXD | PR.02 | Transmissão UART #1 |
| 9 | GND | - | Terra |
| 10 | UART1_RXD | PR.03 | Recepção UART #1 |
| 11 | UART1_RTS | PR.04 | UART #1 Request to Send |
| 12 | I2S0_SCLK | PH.07 | Clock de Áudio I2S #0 |
| 13 | SPI1_SCK | PY.00 | Clock SPI #1 |
| 14 | GND | - | Terra |
| 15 | GPIO12 | PN.01 | Entrada/Saída de Uso Geral |
| 16 | SPI1_CS1 | PY.04 | Chip Select #1 SPI #1 |
| 17 | 3.3V | - | Fonte principal de 3,3V |
| 18 | SPI1_CS0 | PY.03 | Chip Select #0 SPI #1 |
| 19 | SPI0_MOSI | PZ.05 | SPI #0 Master Out / Slave In |
| 20 | GND | - | Terra |
| 21 | SPI0_MISO | PZ.04 | SPI #0 Master In / Slave Out |
| 22 | SPI1_MISO | PY.01 | SPI #1 Master In / Slave Out |
| 23 | SPI0_SCK | PZ.03 | Clock SPI #0 |
| 24 | SPI0_CS0 | PZ.06 | Chip Select #0 SPI #0 |
| 25 | GND | - | Terra |
| 26 | SPI0_CS1 | PZ.07 | Chip Select #1 SPI #0 |
| 27 | ID_I2C_SDA (I2C0_SDA) | PDD.00 | Dados I2C #0 |
| 28 | ID_I2C_SCL (I2C0_SCL) | PCC.07 | Clock I2C #0 |
| 29 | GPIO01 | PQ.05 | Entrada/Saída de Uso Geral |
| 30 | GND | - | Terra |
| 31 | GPIO11 | PQ.06 | Entrada/Saída de Uso Geral |
| 32 | GPIO07 | PG.06 | Entrada/Saída de Uso Geral |
| 33 | GPIO13 | PG.00 | Reservado pelo Sistema |
| 34 | GND | - | Terra |
| 35 | I2S0_LRCK (I2S0_FS) | PI.02 | Sincronismo de Quadro de Áudio I2S #0 |
| 36 | UART1_CTS | PR.05 | UART #1 Clear to Send |
| 37 | SPI1_MOSI | PY.02 | SPI #1 Master Out / Slave In |
| 38 | I2S0_SDIN (I2S0_DIN) | PI.01 | Áudio I2S #0 Dados de Entrada |
| 39 | GND | - | Terra |
| 40 | I2S0_SDOUT (I2S0_DOUT) | PI.00 | Áudio I2S #0 Dados de Saída |
Instruções de Uso
Exemplo simples de controle de GPIO
#install
sudo apt-get install gpiod
# Search for the corresponding number for the pin
sudo gpiofind PH.00
gpiochip0 43
#Set the pin to H, then press Enter to release.
sudo gpioset --mode=wait 0 43=1
#Set the Pin to L, then press Enter to release.
sudo gpioset --mode=wait 0 43=0
#gpio 0_119 Low level maintained for 2 seconds
sudo gpioset --mode=time -s 2 0 119=0
#input
sudo gpioget 0 43
Se você quiser configurar o GPIO que não está habilitado por padrão, siga as etapas abaixo:
Habilitar Cabeçalho de 40 Pinos:
sudo /opt/nvidia/jetson-io/jetson-io.py



Salve e reinicie.
Configure o GPIO não controlado por meio da configuração Overlay:
Passo 1. Baixe e extraia o pacote overlay no seu dispositivo Jetson.
wget https://files.seeedstudio.com/wiki/overlay.zip
Passo 2. Copie build.sh e gpio-overlay.dts para o Jetson.
Passo 3. Edite o arquivo pio-overlay.dts e modifique-o para incluir as definições de pinmux para os pinos de que você precisa.
para mais detalhes você pode ver em jetson-orin-nx-and-orin-nano-series-pinmux-config
Passo 3. Ative a configuração de overlay.
sudo bash ./build.sh
#The following command needs to be executed only once.
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n "seeed gpio config Overlay"
Passo 4. Reinicie o dispositivo para que a configuração entre em vigor.
sudo reboot
Passo 5. Agora você pode controlar os pinos por gpioset que foram modificados recentemente.
#For example px7
sudo gpioset --mode=wait 0 121=1
Cabeçalho de Controle e UART de 12 Pinos

O cabeçalho de Controle e UART de 12 pinos fornece sinais de controle essenciais e interfaces de comunicação UART para conectar e gerenciar dispositivos externos.
As funções dos pinos do reComputer Super são semelhantes às do reComputer Classic. Para informações mais detalhadas, consulte aqui.
HDMI
O reComputer Super está equipado com uma porta HDMI 2.1 Tipo A, que suporta uma resolução de 7680x4320. Isso permite saída de vídeo em ultra alta definição.
Recursos
- Manual do Usuário e Datasheet
- Relatório de Teste de Temperatura
- Esquemático
- Arquivo 3D
- Documento Mecânico - reComputer Super
- Documento Mecânico - reComputer Super PCBA
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para oferecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja o mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.