Como usar o RoboSense LiDAR no reComputer
Introdução
Os sensores RoboSense LiDAR fornecem dados de nuvem de pontos 3D de alta precisão para várias aplicações. Este guia foca na configuração do modelo RS32 em um dispositivo reComputer J30/40 executando ROS Noetic.
Este wiki fornece um guia passo a passo para instalar e configurar o RoboSense LiDAR no Jetson reComputer J30/40 usando ROS, e visualizar os dados da nuvem de pontos.
Pré-requisitos
-
reComputer série J30/40: Já concluiu a instalação do sistema JetPack 5.x e do ambiente ROS Noetic de acordo com o tutorial.
-
Toda a série de lidar RoboSense

Primeiros Passos
Instalar o Robosense SDK
-
Passo 1: Instalar dependências básicas
sudo apt-get update &&
sudo apt-get install -y libyaml-cpp-dev libpcap-dev -
Passo 2: Criar o workspace
mkdir -p catkin_ws/src
cd catkin_ws/src -
Passo 3: Clonar o rslidar_sdk
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update -
Passo 4: Abra o arquivo CMakeLists.txt localizado em catkin_ws/src/rslidar_sdk/CMakeLists.txt e altere a variável COMPILE_METHOD no topo do arquivo para CATKIN.

-
Passo 4: Exclua o arquivo package.xml existente localizado no diretório catkin_ws/src/rslidar_sdk/, e renomeie o arquivo package_ros1.xml para package.xml.

-
Passo 5: Insira os seguintes comandos no terminal
cd ~/catkin_ws/src/rslidar_sdk/
mkdir build && cd build
cmake .. && make -j4
cd ~/catkin_ws/
catkin_make
Conectar o hardware
- Passo 1: Conecte a fonte de alimentação, o Robosense RS32 LiDAR, a caixa de interface e o cabo Ethernet ao reComputer J4012 conforme descrito abaixo:
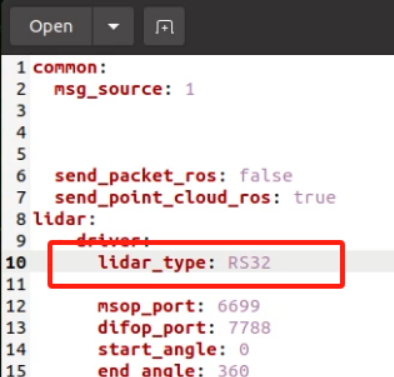
- Passo 2: Abra o arquivo config.yaml localizado em /catkin_ws/src/rslidar_sdk/config/config.yaml e altere o lidar_type na linha 10 para RS32. Salve o arquivo e feche-o. Certifique-se de preencher o modelo correto de LiDAR de acordo com o seu dispositivo.
Configurar o endereço IP do reComputer
O endereço IP padrão para o Robosense RS32 LiDAR é 192.168.1.200, o endereço IP do host de destino é 192.168.1.102, o número da porta do pacote MSOP é 6699 e o número da porta do pacote DIFOP é 7788. Após conectar o hardware, você precisa configurar manualmente o endereço IP do reComputer.
-
Passo 1: Abra as configurações de Ethernet.

-
Passo 2: Selecione configurações manuais no campo IPv4 e insira o endereço IP 192.168.1.102 e a máscara 255.255.255.0.

ping 192.168.1.200
Se você receber dados do LiDAR, isso indica uma conexão bem-sucedida.
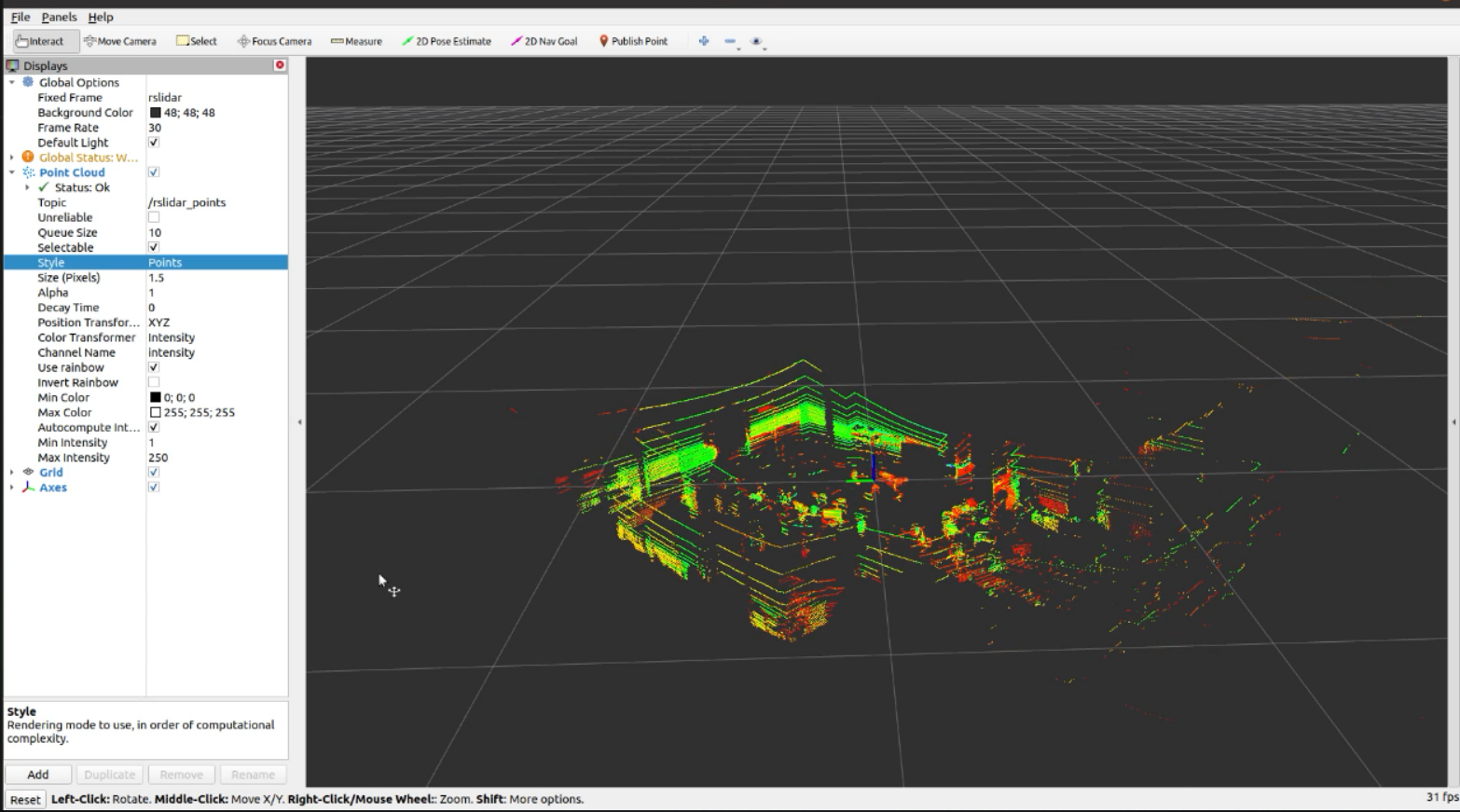
Executando o código do Lidar
cd ~/catkin_ws/
source devel/setup.bash
roslaunch rslidar_sdk start.launch
Suporte Técnico & Discussão de Produtos
Obrigado por escolher nossos produtos! Estamos aqui para lhe oferecer diferentes formas de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.