Introdução ao uso do Robô Bípedo de Duas Rodas baseado na Plataforma de Desenvolvimento StackForce
Este tutorial fornece apenas instruções de montagem e depuração para ajudar os desenvolvedores a construir o mais rápido possível um robô completo com rodas e pernas. Se você precisar aprender os princípios fundamentais dos robôs com rodas e pernas, consulte o vídeo tutorial de código aberto de DengGe no Bilibili. Para desenvolvimento secundário, você pode procurar tutoriais em outros sites ou fóruns.
Introdução
O robô bípedo de duas rodas StackForce é desenvolvido com base na plataforma leve de desenvolvimento de robótica StackForce. Seu hardware central é composto pela placa de controle principal da série StackForce, placa de acionamento de motor e placa de acionamento de servo.
O robô inclui um modelo cinemático de corpo inteiro e um algoritmo de autoestabilização adaptativo ao estado. Com o poder de computação em tempo real da plataforma StackForce, ele suporta controle de múltiplas posturas, autoestabilização em terrenos complexos, descida de escadas e movimento estável em vários declives. A plataforma oferece suporte a transmissores RC, Bluetooth, comunicação serial e controle sem fio. Os usuários podem programar e ajustar o sistema conforme necessário. O produto fornece tutoriais completos de instalação e cursos em vídeo, tornando-o um robô bípedo de duas rodas de mesa com ótimo custo-benefício.

Links técnicos
-
Vídeo tutorial de código aberto de DengGe no Bilibili: https://www.bilibili.com/video/BV1kz421B73V/?share_source=copy_web&vd_source=dd1f489993457f044ad480eab0e73bdc
-
Código aberto para o curso do robô com rodas e pernas: https://gitee.com/StackForce/bipedal_wheeled_robot
-
Documentação da plataforma leve de desenvolvimento de robótica StackForce: http://stackforce.cc/#/
-
Projetos de robótica de código aberto para a plataforma leve de desenvolvimento de robótica StackForce: https://gitee.com/StackForce
-
Aprendizado de teoria e código do robô com rodas e pernas StackForce Mini https://github.com/Seeed-Projects/AI_Robotics_Academy/blob/main/Seeed_Mini_Wheeled_Legged_Robot/English/README.md
Principais recursos
- Código aberto e baixo custo: Segue uma licença de código aberto; todo o código-fonte e arquivos de projeto estão totalmente disponíveis, permitindo que desenvolvedores estudem, modifiquem e façam desenvolvimento secundário livremente.
- Controle de motor de alto desempenho: Equipado com tecnologia FOC (Field-Oriented Control), oferecendo suporte a controle de velocidade, posição e torque em malha aberta/fechada para controle de movimento preciso.
- Poderoso suporte de hardware: Utiliza um controlador principal ESP32 com interfaces ricas como I2C, SPI e PWM, permitindo expansão flexível de recursos.
- Capacidades abrangentes: Suporta autoequilíbrio, movimento em alta velocidade, estabilização de postura e controle sem fio, adaptando-se a vários terrenos complexos.
- Fácil de aprender e usar: Acompanha código de exemplo completo e tutoriais em vídeo, reduzindo significativamente a barreira de aprendizado para iniciantes.
Especificações
| Especificação | Detalhes |
|---|---|
| Placa de Controle Principal | Placa de controle principal StackForce |
| Placa de Driver de Motor | Driver de motor brushless de canal duplo 5A (baixa potência) |
| Motores | Motores brushless de gimbal 2208 |
| Placa de Driver de Servo | Driver de servo multicanal com IMU integrada |
| Fonte de alimentação | Bateria de polímero de lítio 12,6V |
| Encoder | Encoder magnético de alta precisão MT6701 de 14 bits |
| Controle sem fio | Controle remoto WiFi + controle sem fio Bluetooth PS4 |
| Peso total | 540 g |
| Dimensões | 10,5 × 21,0 cm (C × L), Altura 12,0–21,0 cm |
Lista de materiais (BOM)
| Nome do item | Quantidade | Unidade | Especificações | Observações/Padrões |
|---|---|---|---|---|
| Componentes eletrônicos | ||||
| Placa de Controle Principal StackForce | 1 | pc | StackForce | |
| Placa Driver StackForce 5A de Baixa Potência | 1 | pc | StackForce | |
| Placa de Servo StackForce | 1 | pc | StackForce | |
| Encoder MT6701 | 2 | pc | StackForce | |
| Motor de Gimbal 2208 | 2 | pc | ||
| Servo DS041MG 500–2500 | 4 | pc | ||
| Controle Remoto MC6C-MINI | 1 | pc | ||
| Receptor MC7RBv2 | 1 | pc | ||
| Bateria Li-Polymer 12V | 1 | pc | 19×34×42mm | |
| Conector de Motor MR30-U | 2 | pc | Para motor | |
| Cabo de Encoder SH1.0-5P | 2 | set | Para encoder | |
| Fio Dupont 3P (Fêmea-Fêmea) | 1 | set | Para receptor | |
| Ferragens mecânicas | ||||
| Porca Travante M3 | 4 | pc | M3 | GB889.1-86 |
| Porca M3 | 4 | pc | M3 | DIN934 |
| Espaçador de Nylon | 4 | pc | 5×3.2×9mm | ABS |
| Arruela M3 | 4 | pc | M3 | Aço inox 304 |
| Ímã Radial | 2 | pc | 6×2.5mm | |
| Parafuso de Cabeça Redonda M2×4 | 24 | pc | M2×4 | GB/T845 |
| Parafuso de Cabeça Redonda M2×10 | 12 | pc | M2×10 | GB/T845 |
| Parafuso de Cabeça Redonda M3×6 | 4 | pc | M3×6 | GB/T845 |
| Parafuso de Cabeça Redonda M3×8 | 4 | pc | M3×8 | GB/T845 |
| Parafuso de Cabeça Redonda M3×16 | 4 | pc | M3×16 | GB/T845 |
| Parafuso de Cabeça Redonda M4×18 | 2 | pc | M4×18 | GB/T845 |
| Parafuso Autoatarraxante M2×6 | 16 | pc | M2×6 | GB/T845 |
| Parafuso de Cabeça Chata M2×6 | 46 | pc | M2×6 | Aço inox 304 |
| Parafuso de Cabeça Chata M3×6 | 16 | pc | M3×6 | Aço inox 304 |
| Espaçador de Cobre M3×7+4 | 4 | pc | M3×7+4 | Cobre / GB |
| Rolamento 6704ZZ | 4 | pc | Ø27×Ø20×4mm | |
| Rolamento 6701ZZ | 6 | pc | Ø18×Ø12×4mm | |
| Componentes estruturais | ||||
| Peças Impressas em 3D | 29 | pc | ||
| Pneus 1:10 6030-6085 Resistentes ao Desgaste | 2 | pc |
Sumário
- Tutorial da Versão Montada
- Tutorial da Versão em Kit 1 - Montagem
- Tutorial da Versão em Kit 2 - Calibração
Tutorial da Versão Montada
Manual Básico de Operação do StackForce Wheeled_Legged_Robot (PDF)
Você pode controlar o robô remotamente simplesmente iniciando-o na ordem especificada no documento em PDF.
Tutorial da Versão em Kit 1 - Montagem
Documento de instalação do Mini-Wheeled-legged robot.pdf
A montagem possui muitas etapas, portanto, siga o guia com atenção. Alguns furos são feitos para parafusos autoatarraxantes, e é normal que os parafusos do pacote sejam diferentes dos do tutorial. Isso não afetará a montagem, e você pode usar parafusos de substituição adequados, se necessário.
Durante a montagem, preste atenção ao aperto dos parafusos. Não os aperte demais para evitar espanar ou danificar as roscas.
Tutorial da Versão em Kit 2 - Calibração
Primeiro, faça o download dos arquivos de código necessários para a calibração.
Configuração do ambiente
Passo 1: Baixe o Visual Studio Code.

Passo 2: Abra o Visual Studio Code, depois pesquise e instale a extensão PlatformIO IDE no Extensions Marketplace.
Após clicar em instalar, o PlatformIO fará automaticamente o download dos componentes adicionais necessários. Em alguns casos, o MinGW pode estar ausente, o que impedirá você de criar novas pastas. Se isso acontecer, será necessário instalar o MinGW-w64 manualmente.
Step 3:Download MinGW-w64
Link de download do pacote de ferramentas do Wheeled-Legged Robot(Inclui MinGW-w64)
Após baixar o arquivo, extraia-o e encontre a mingw64 folder dentro do pacote de ferramentas.
Extraia-a e instale-a em um diretório que use apenas caracteres em inglês.
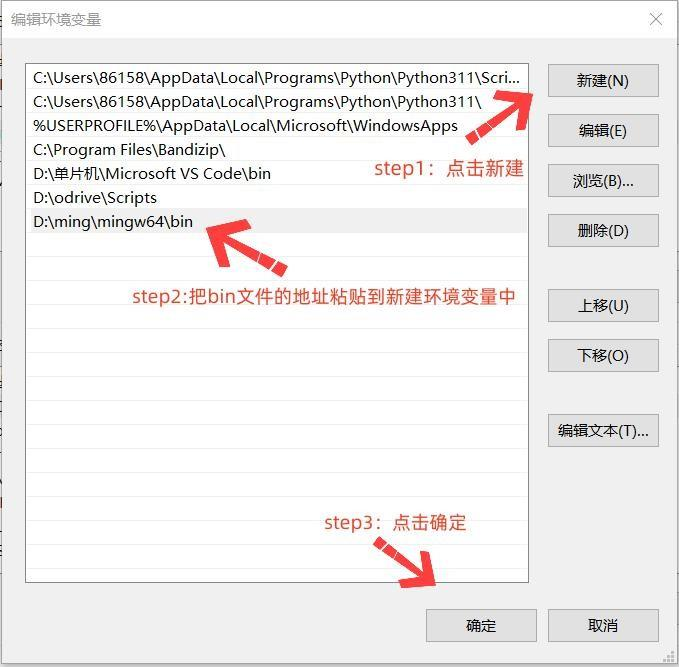
Abra a extracted folder → abra a bin folder → copie o path of the bin directory
(por exemplo: D:\ming\mingw64\bin).
Configuração do ambiente:
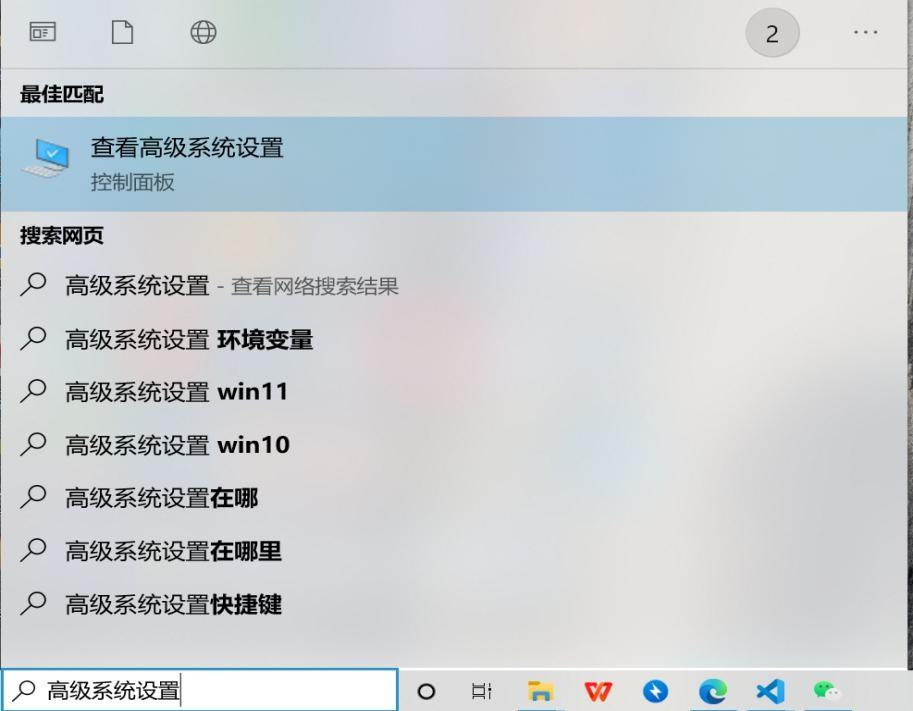
Pesquise e abra Advanced System Settings no seu computador → Environment Variables → System variables → Path → New → cole o bin path copiado anteriormente → clique em OK.
- 1: Pesquise e abra
Advanced System Settings.
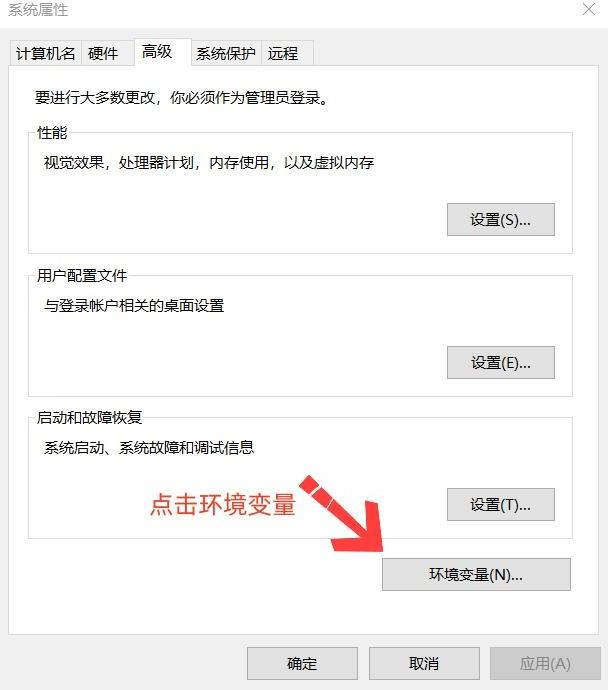
- 2: Clique em
Environment Variables.
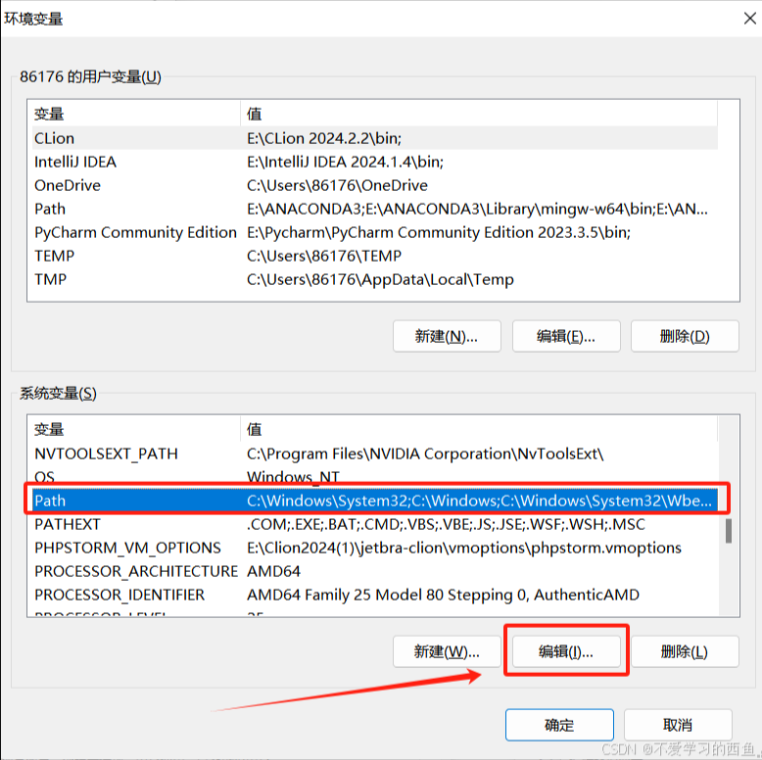
- 3: Clique duas vezes em
Pathem Variáveis de sistema.
- 4: Crie uma nova entrada de variável de ambiente.
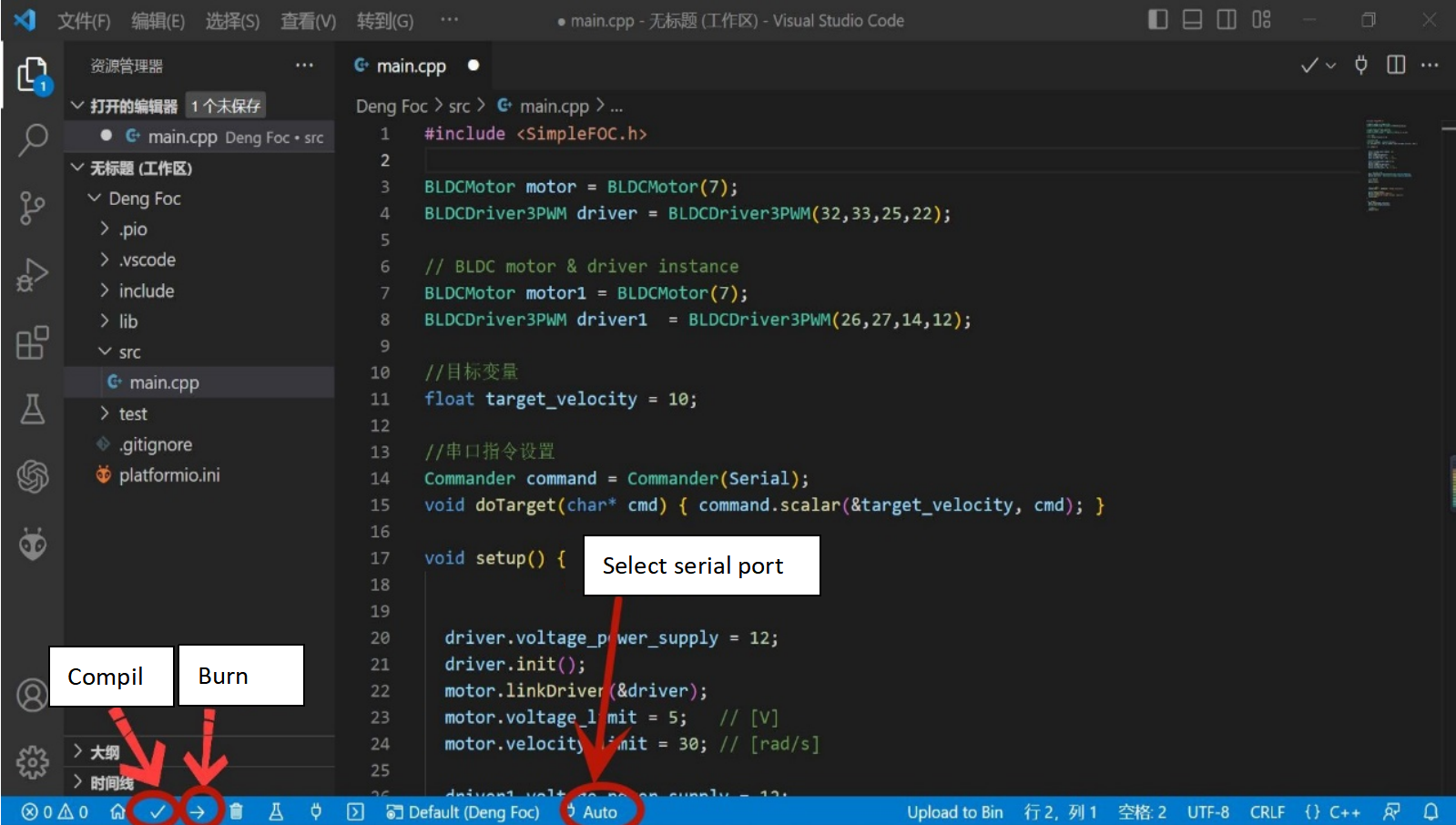
Etapa 4: Instruções dos Botões de Compilar e Upload
(√: Compilar o programa →: Fazer upload do programa para o hardware Auto: Selecionar a porta serial)
A seguir são explicados os botões de upload. Ainda não faça o upload do programa. Desenvolvedores podem revisar aqui primeiro o processo de upload.
Após conectar o computador ao hardware, clique em Auto (opcional).
O sistema detectará e recomendará automaticamente uma porta serial.
Depois de selecionar a porta serial, clique em Compile (opcional) e Upload para gravar o programa no hardware.
Gravação e Depuração do S1
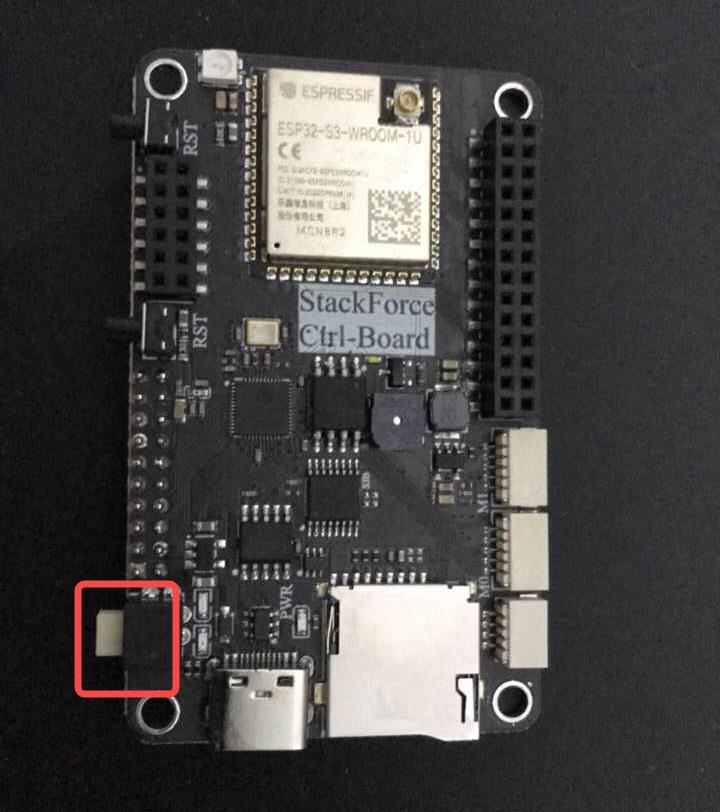
Conectando o Chip S1
Conecte o cabo USB. O lado com o vão do conector USB deve ficar para cima e o lado sem o vão deve ficar para baixo. Solte o botão branco para alternar para o chip S1 (a luz amarela acenderá).
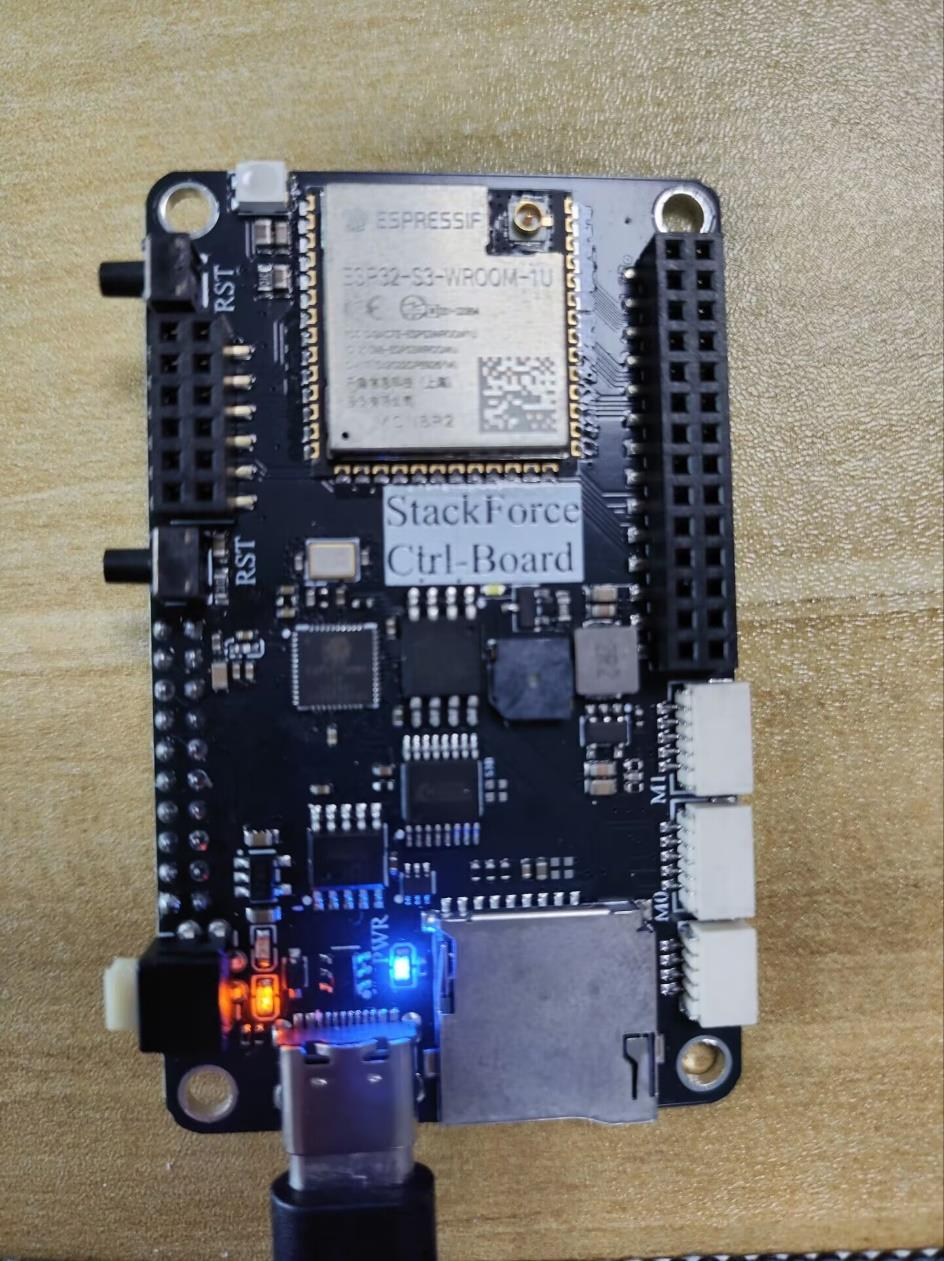
Observação: Por que existe um lado superior e um inferior?
Como a placa possui dois chips — S1 para o programa do motor e S3 para o programa de controle dos servos — o conector Type-C usa duas fileiras de pinos separadas para comunicação. Cada chip usa uma fileira diferente para gravação. O botão branco alterna qual chip o computador irá gravar.
Gravando o Programa do S1
Método 1: De acordo com o programa de controle do motor S1 pré-gravado, você pode pular para Vofa Serial Assistant Download and Usage Guide.
Método 2: Regravar o programa de controle do motor S1 (não recomendado)
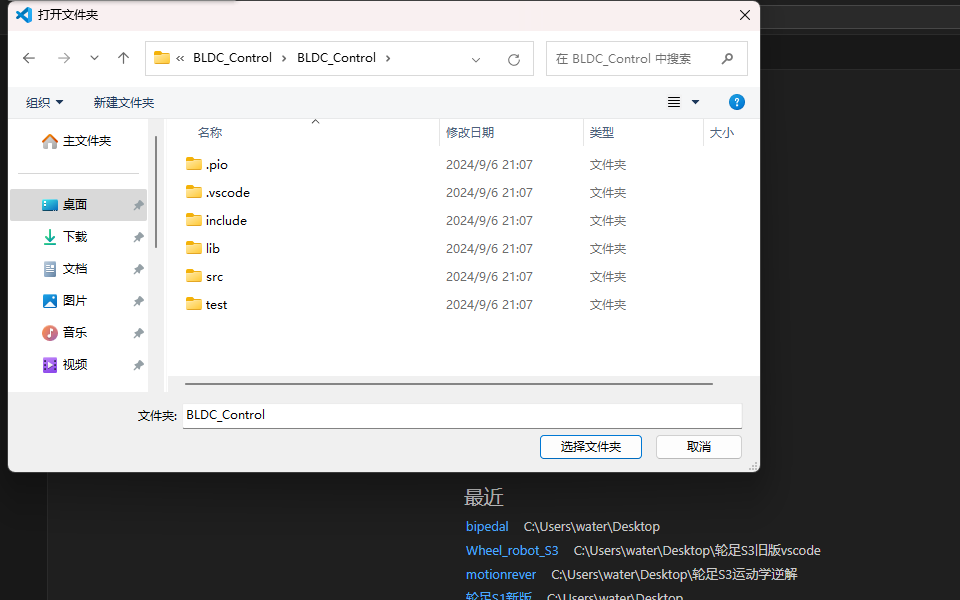
Abra o projeto BLDC_Control no VS Code.
Isso permite que o PlatformIO instale automaticamente as bibliotecas necessárias, portanto não arraste a pasta do projeto diretamente para o VS Code. Em vez disso, abra uma nova janela do VS Code e use File → Open Folder.
Localize a pasta onde o programa do S1 está armazenado e clique em Select Folder.
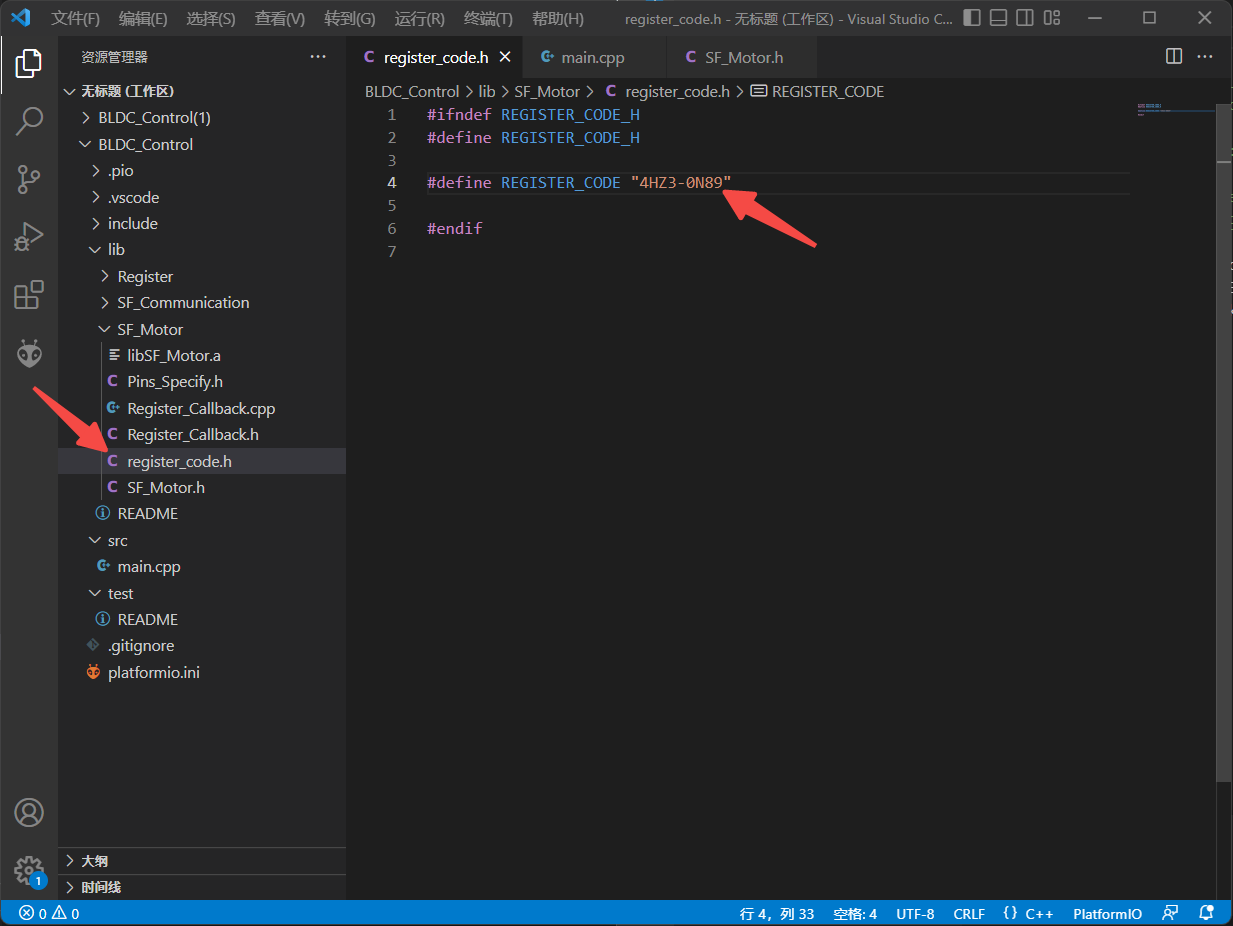
Antes de gravar, você precisa modificar o código de registro e o modo de comunicação:
Modificar o código de registro:
Cada placa possui um código de registro exclusivo.
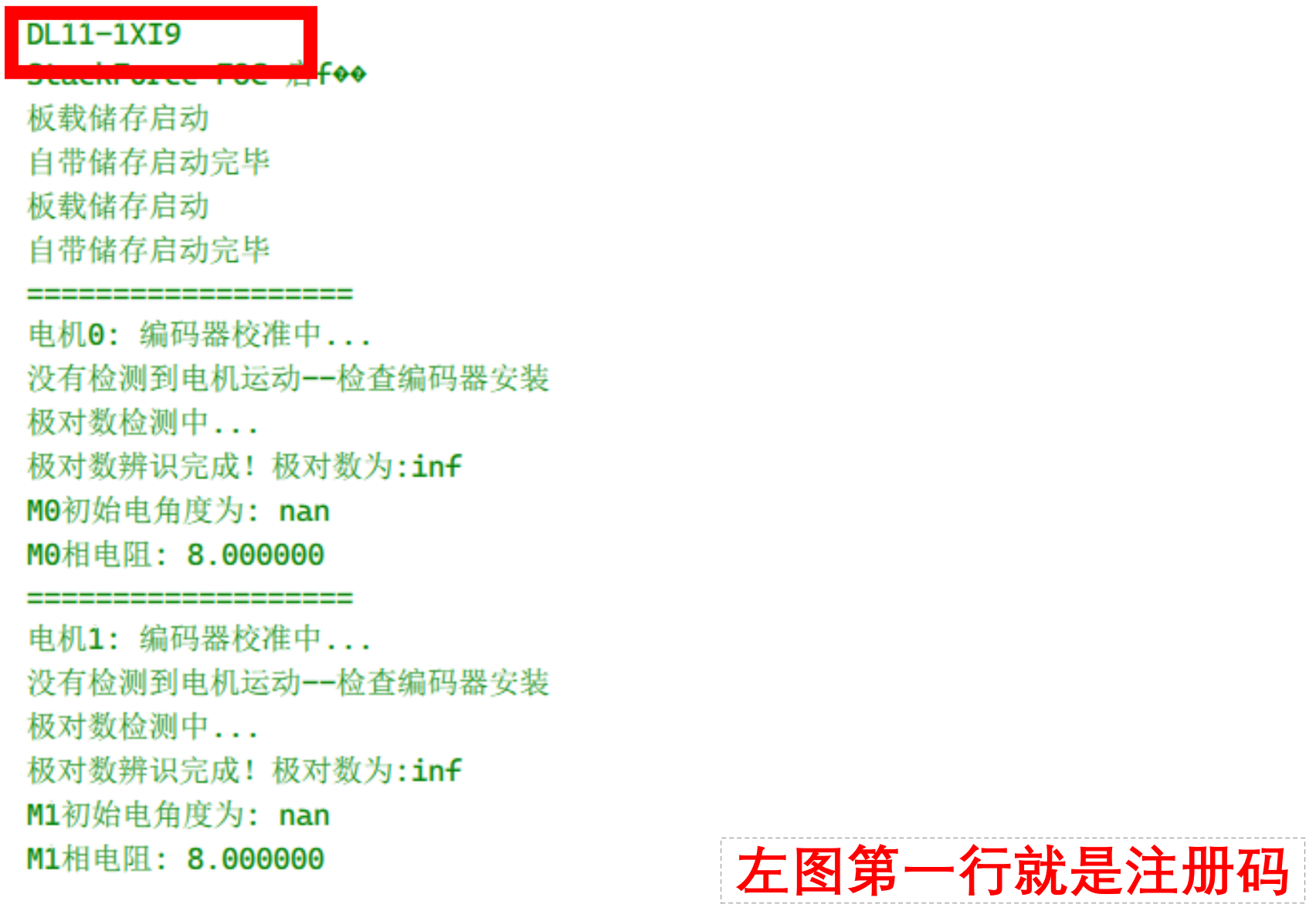
Seu código de registro está impresso na etiqueta anexada à embalagem da placa de controle principal.
Insira esse código no campo correspondente.
Você também pode ler o código de registro a partir da saída serial do S1 (explicado anteriormente no guia de instalação).
Modificar o modo de comunicação:
Altere o valor na posição mostrada na imagem para ONBOARD. (USB = comunicação serial entre o chip S1 e o computador, ONBOARD = comunicação entre os chips S1 e S3.)
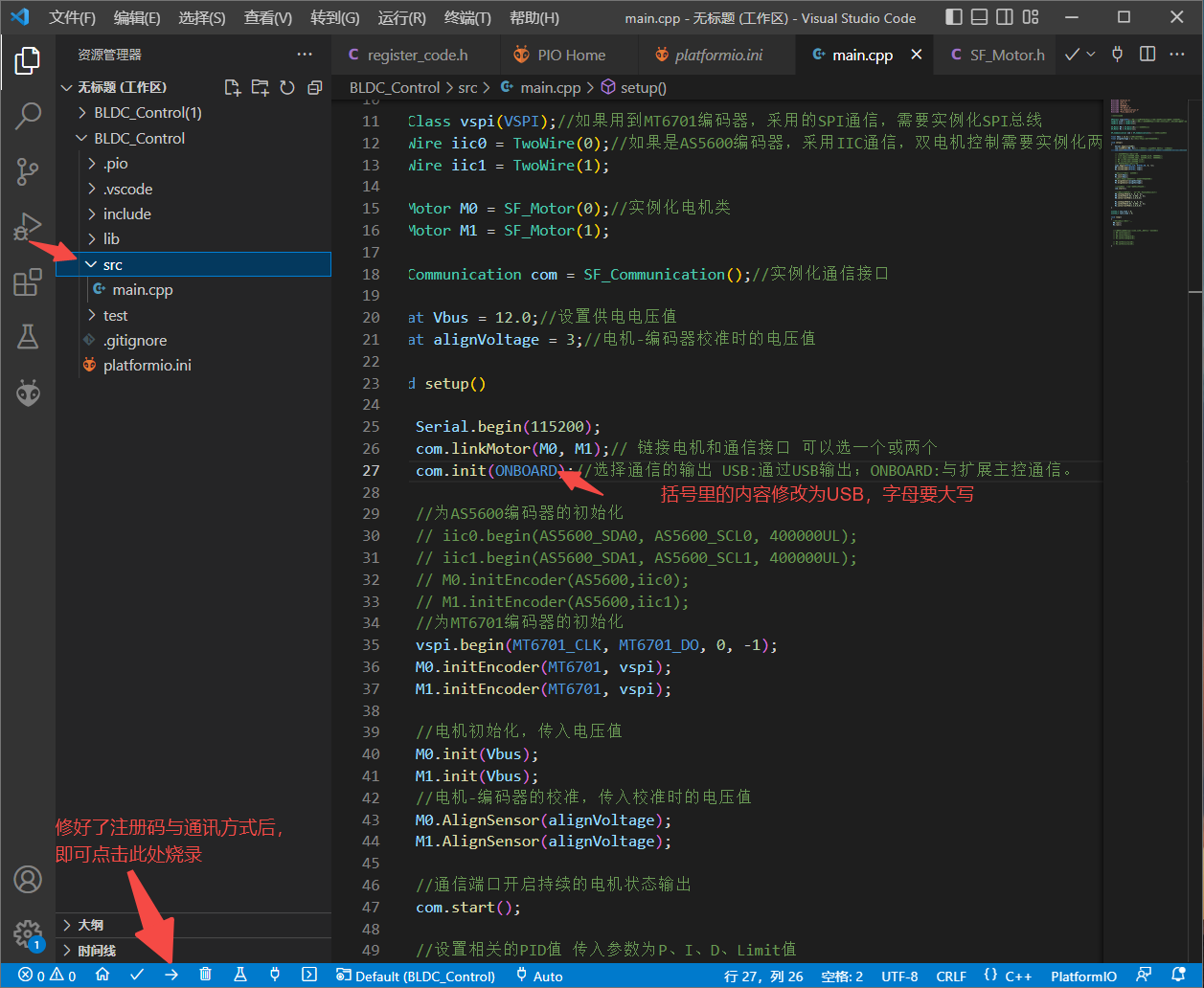
Após fazer as alterações, clique no ícone → no canto inferior esquerdo para gravar o programa.
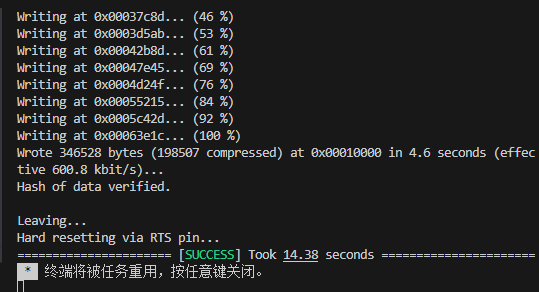
Problemas comuns durante a gravação e como resolvê-los:
- Resultado de gravação bem-sucedida
- Este é o chip S3, que não corresponde ao programa S1
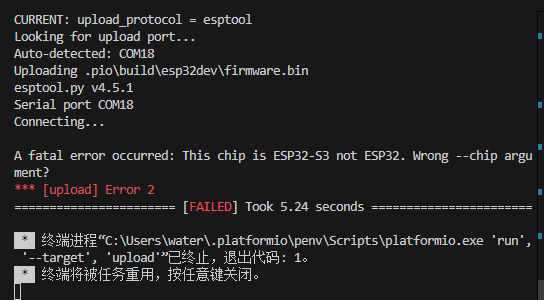
Solução:
Verifique se o cabo USB está conectado invertido — o lado sem o vão deve ficar para cima.
Verifique se o botão branco está solto. Quando solto, o LED amarelo acende, indicando que a placa está em modo de gravação S1.
- Porta serial ocupada
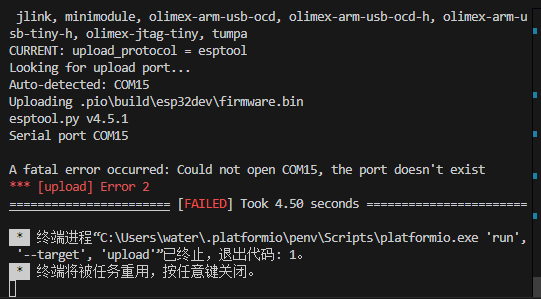
Solução:
Verifique se outro programa está usando a porta serial.
Certifique-se de que o monitor serial do Vofa esteja fechado.
Verifique se todos os outros assistentes seriais liberaram a porta.
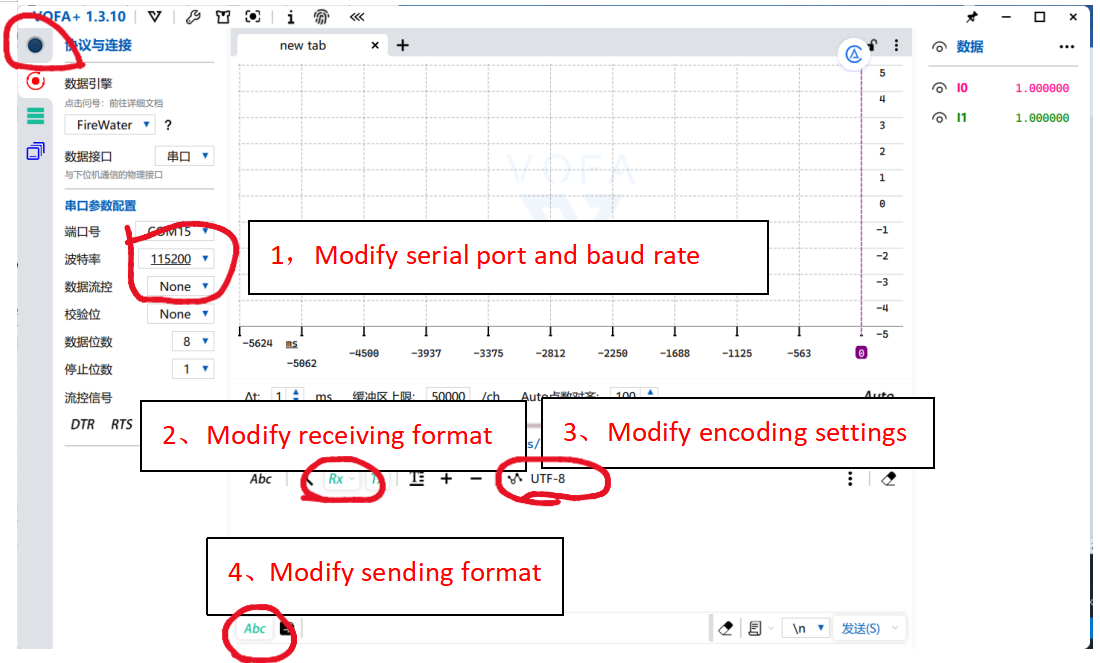
Guia de Download e Uso do Vofa Serial Assistant
Em seguida, abra o assistente serial e defina o baud rate para 115200 para verificar a saída serial. Link de download do Vofa Serial Assistant: Download Center | VOFA-Plus
Depuração do Programa de Controle do Motor S1 – Calibração do Número de Pares de Polos
Segure o robô de forma que as rodas fiquem fora do chão e pressione o botão de reset do S1.
As informações de pares de polos aparecerão no Vofa. Aguarde as rodas terminarem a rotação de autoteste.
Se o valor detectado de pares de polos for 7, a calibração foi bem-sucedida, conforme mostrado abaixo:
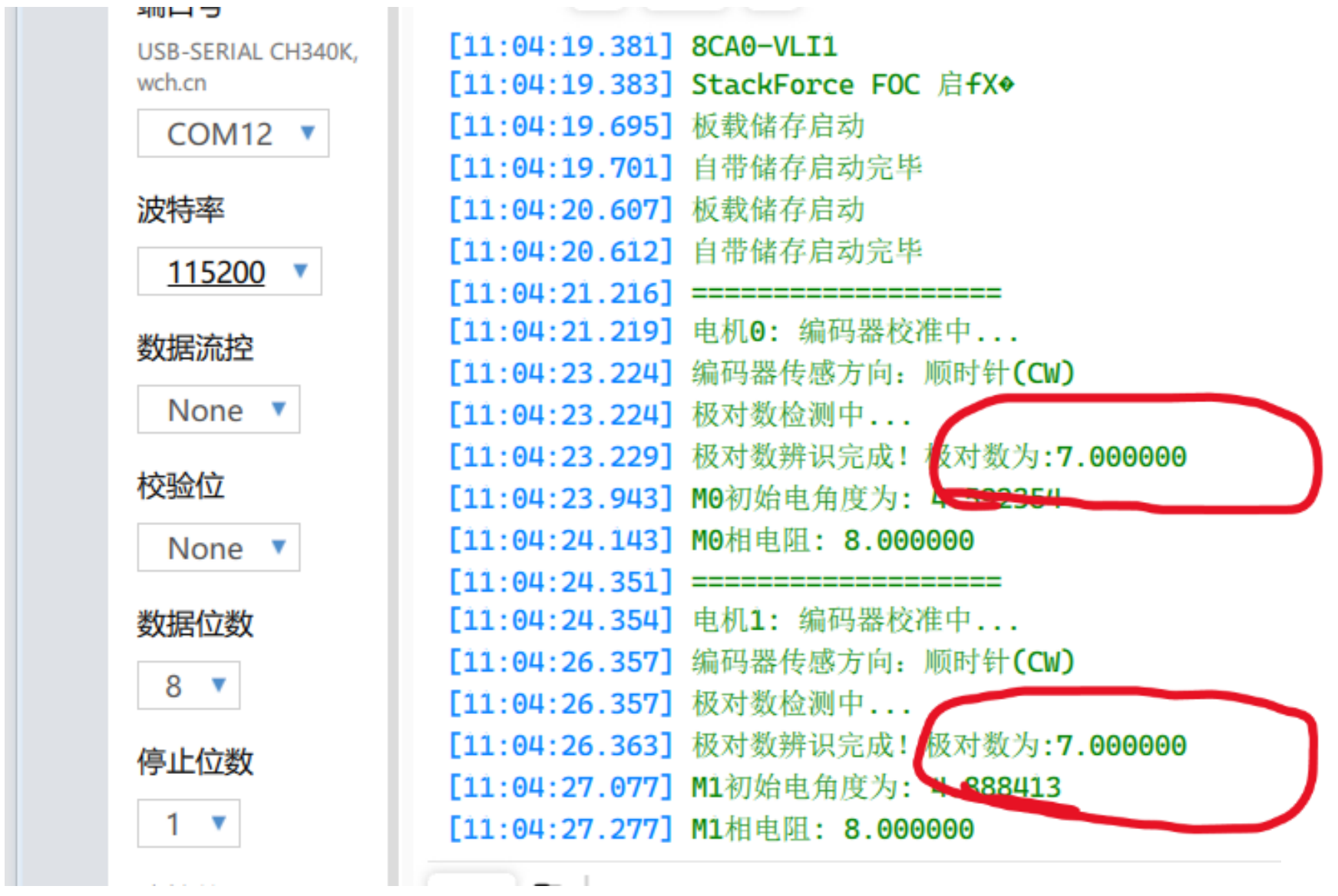
Se o valor de pares de polos mostrar inf ou outro texto, verifique se a alimentação está ligada, confirme a fiação e certifique-se de que o ímã esteja instalado corretamente.
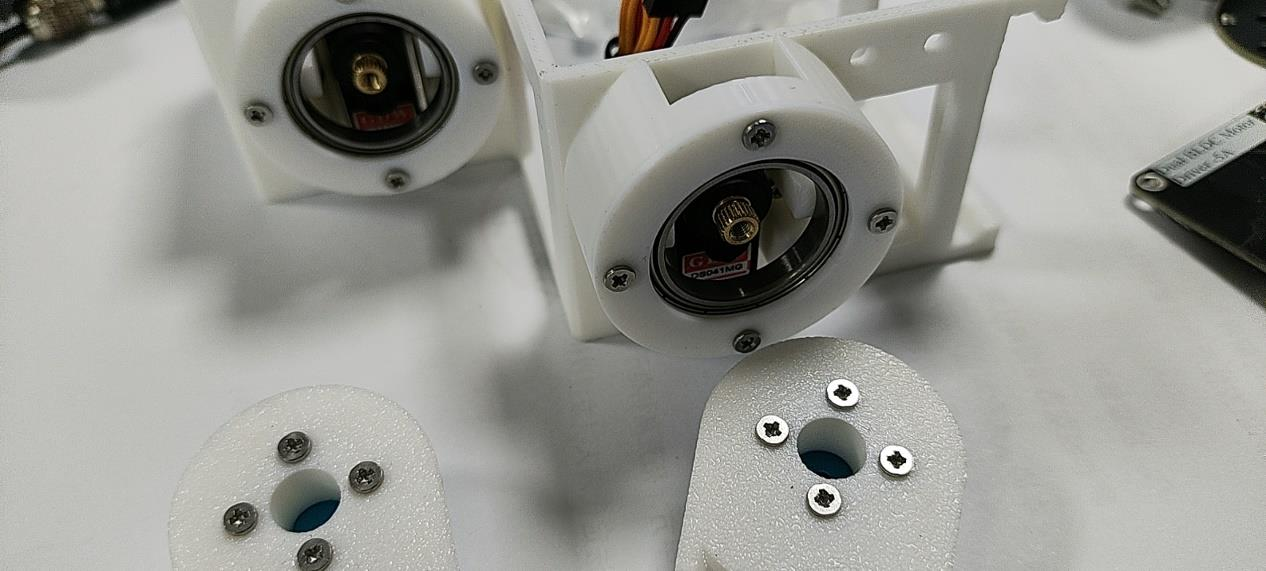
Se o valor detectado for 6, 8 ou qualquer outro diferente de 7, a roda pode estar montada muito apertada
(consulte o guia de instalação das pernas com rodas e pesquise por motor bearing installation para reinstalar).
A roda também pode estar tocando o chão ou outro objeto.
Sempre que o robô for ligado ou o S1 for reiniciado, as rodas devem estar fora do chão para que o autoteste seja executado corretamente.
Repita o processo e pressione o botão de reset do S1 até que o número de pares de polos mostre 7.
Aquisição do Valor de Offset do S3
Depois de concluir a gravação do S1, alterne para o chip S3 e grave o programa do S3. (Certifique-se de que o vão da porta USB fique voltado para baixo. Pressione o botão mostrado na imagem — quando a luz ficar verde, isso indica que o sistema mudou para o S3.)
Certifique-se de remover o conjunto da coxa antes de gravar o programa.
-
- No VSCode, abra a pasta bipedal_calibrate (programa de calibração de valores de offset), grave o programa diretamente e depois abra o Vofa e defina o baud rate para
115200.
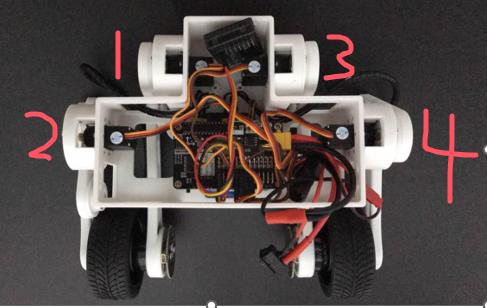
Você verá uma saída serial como0,0,0,0, que representa os valores de offset dosservos 1, 2, 3 e 4.
- No VSCode, abra a pasta bipedal_calibrate (programa de calibração de valores de offset), grave o programa diretamente e depois abra o Vofa e defina o baud rate para
-
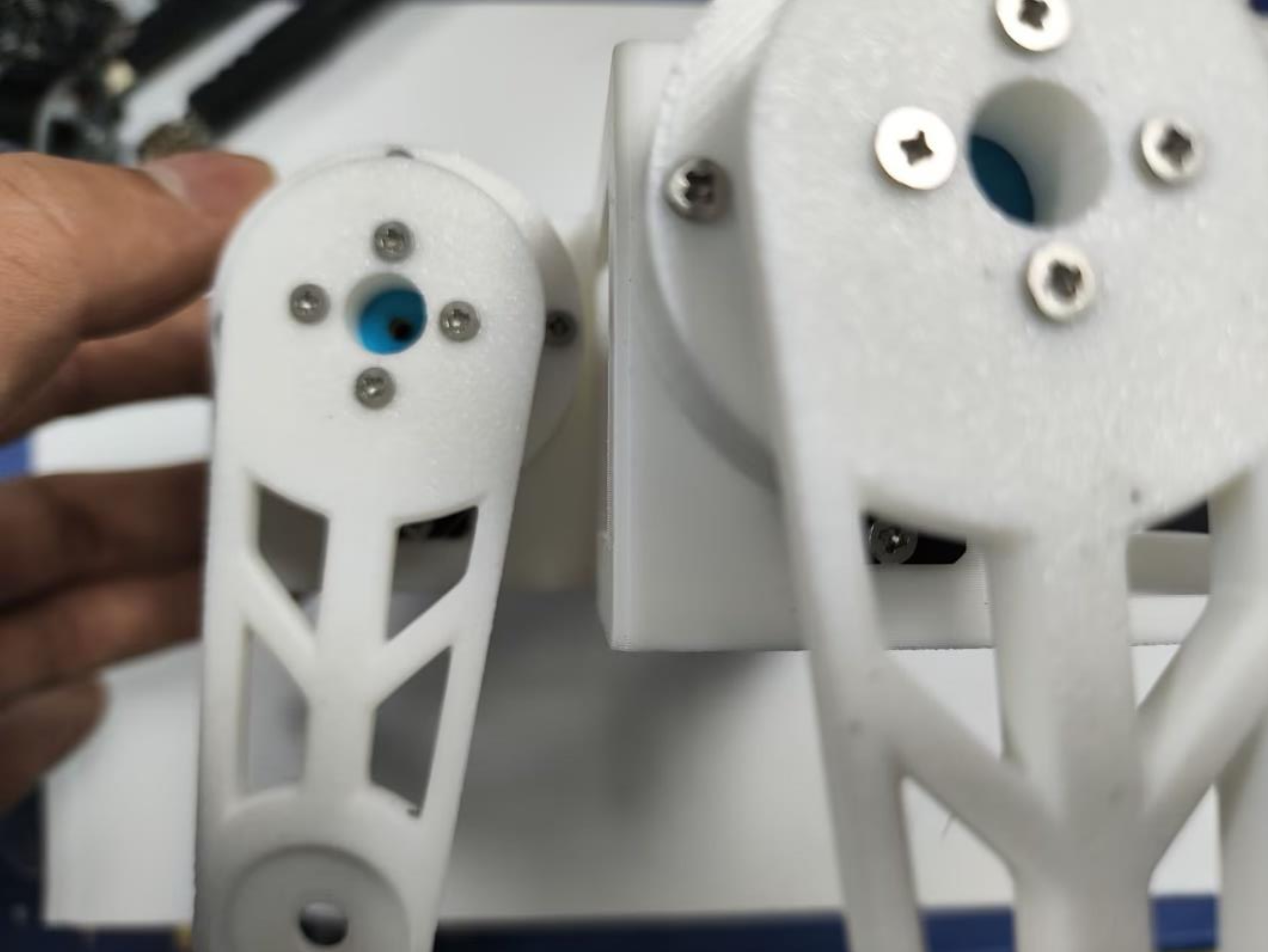
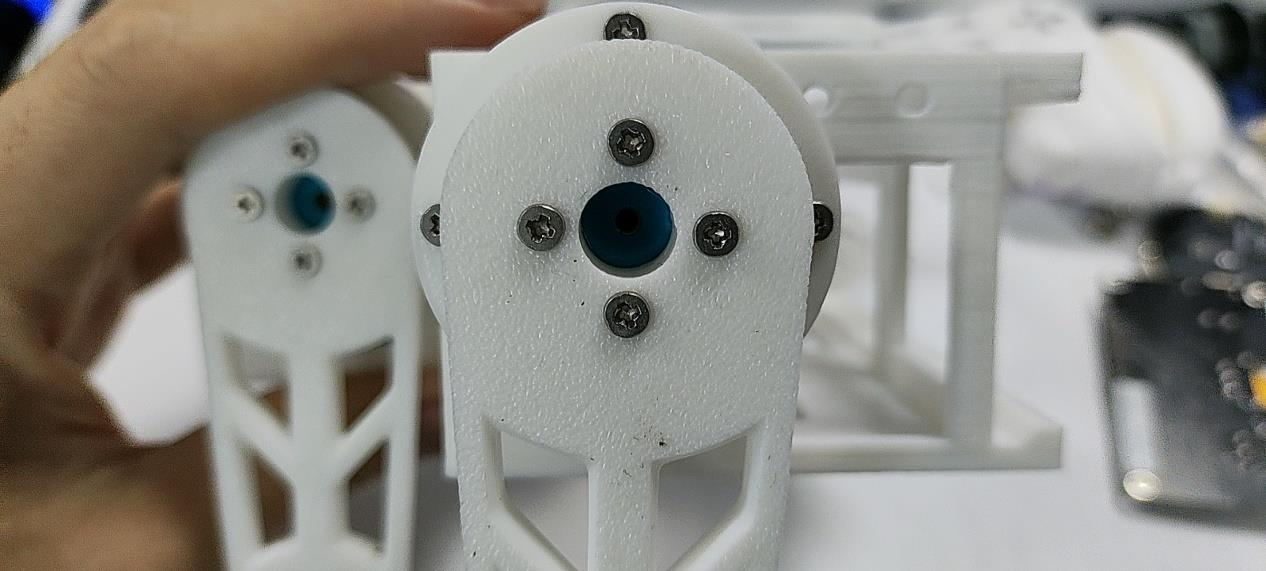
- Ligue a bateria. Depois que os servos terminarem de girar, instale as pernas de modo que fiquem o mais perpendiculares possível ao chão.
-
- No terminal serial, insira comandos como
1,2,3,4para controlar os servos até que as pernas fiquem perfeitamente verticais.
Guia de direção: Quando a perna estiver voltada para você, o sentido horário é negativo e o anti-horário é positivo.
- No terminal serial, insira comandos como
Por exemplo: Na imagem acima, o servo 1 está levemente inclinado para a esquerda e o servo 2 ligeiramente para a direita.
Digite 5,-6,0,0 para corrigir os servos 1 e 2 de volta à vertical. (5 significa girar o servo 1 no sentido anti-horário em 5 unidades; -6 significa girar o servo 2 no sentido horário em 6 unidades.)
Ajuste os servos 3 e 4 usando o mesmo método:
Use 0,0,x,0 para controlar o servo 3 e 0,0,0,x para controlar o servo 4.
Depois de terminar todos os ajustes de offset, aperte os parafusos pretos dentro da carcaça do servo para fixar as pernas.
Registre os valores de offset atuais — eles precisam ser escritos no programa de controle dos servos S3 abaixo.
Calibração e Depuração do S3
StackForce Wheeled_Legged_Robot Basic Operation Manual (PDF)
1. Modificar Valores de Offset
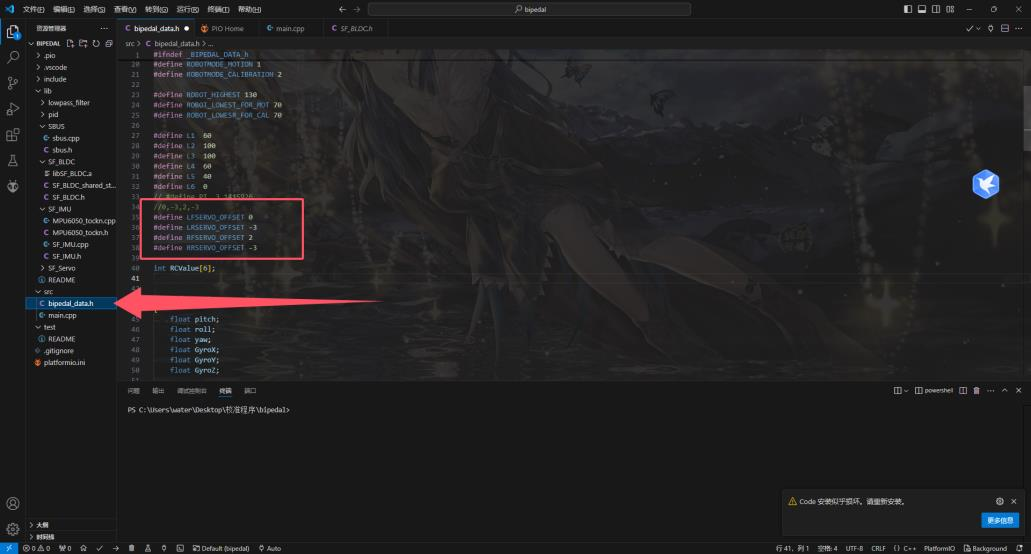
Abra a pasta bipedal (programa de controle de servo) no VS Code.
No arquivo bipedal_data.h, atualize os valores de offset em OFFSET.
Insira os valores de offset obtidos no programa anterior nas posições correspondentes mostradas abaixo.
2. Depuração dos Servos
- Após gravar o programa, desconecte o USB.
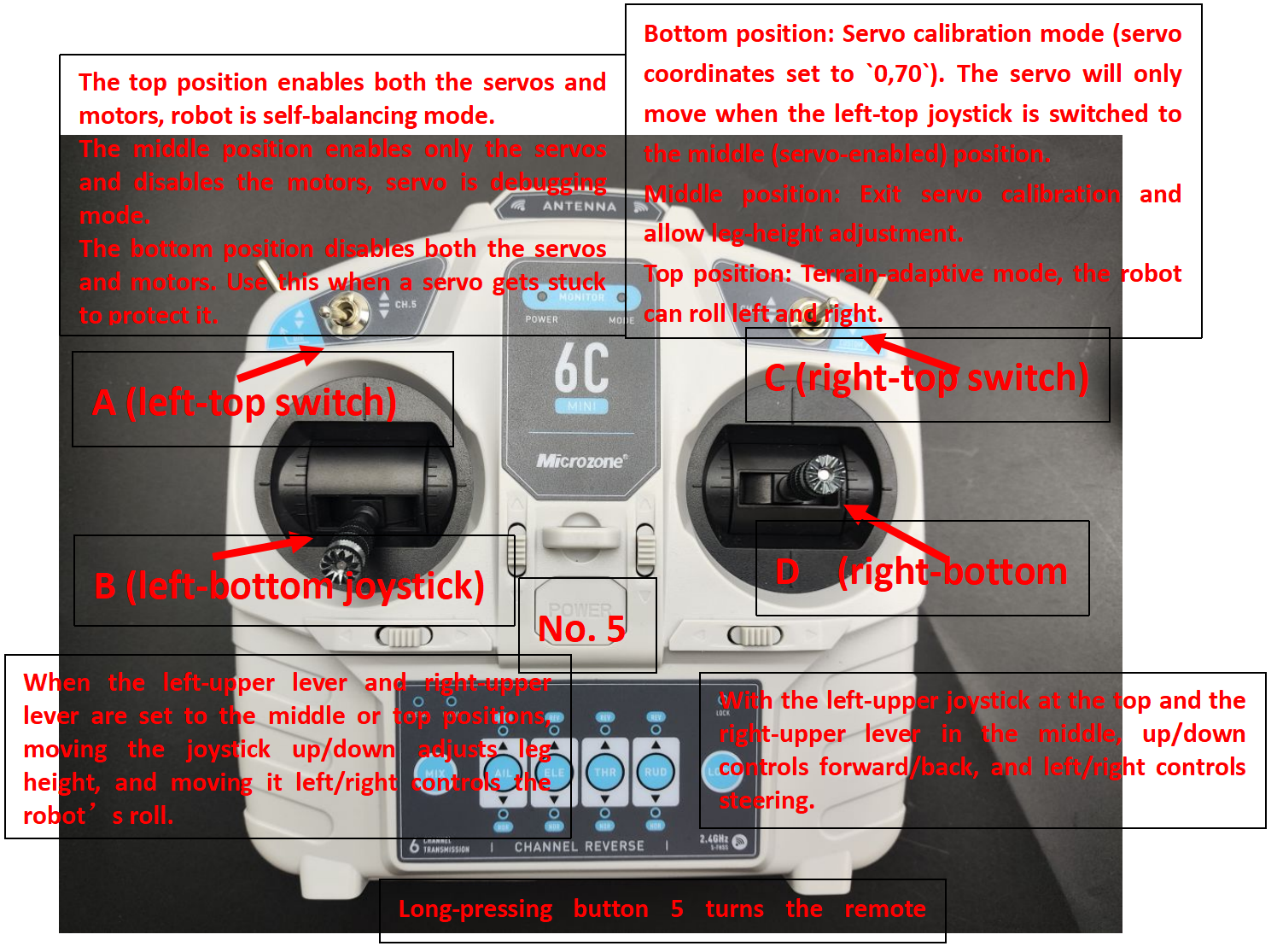
Pressione o 5 por longo tempopara ligar o controle remoto.
Ajuste as chaves:A (superior esquerda) para o meio,B (inferior esquerda) para baixo,C (superior direita) para baixo. - Segure o robô e mantenha-o nivelado para que a calibração do giroscópio e a calibração do motor possam prosseguir.
Pressione o botão de alimentação para ligar o robô. - Aguarde cerca de 10 segundos para o autoteste ser concluído.
ColoqueA no meiopara habilitar os servos. Eles retornarão à posição inicial.
ColoqueC no meiopara sair da calibração dos servos.
Deslize B para ajustar a altura das pernas (coordenada Y da roda).
Deslize D para mover as rodas para frente/trás (coordenada X da roda). - Observação sobre o movimento do robô com rodas-pernas:
Quando D é empurrado para frente, os servos giram para mover a coordenada X da roda para trás. O robô com rodas-pernas se inclina para frente, fazendo com que o robô se mova para frente.
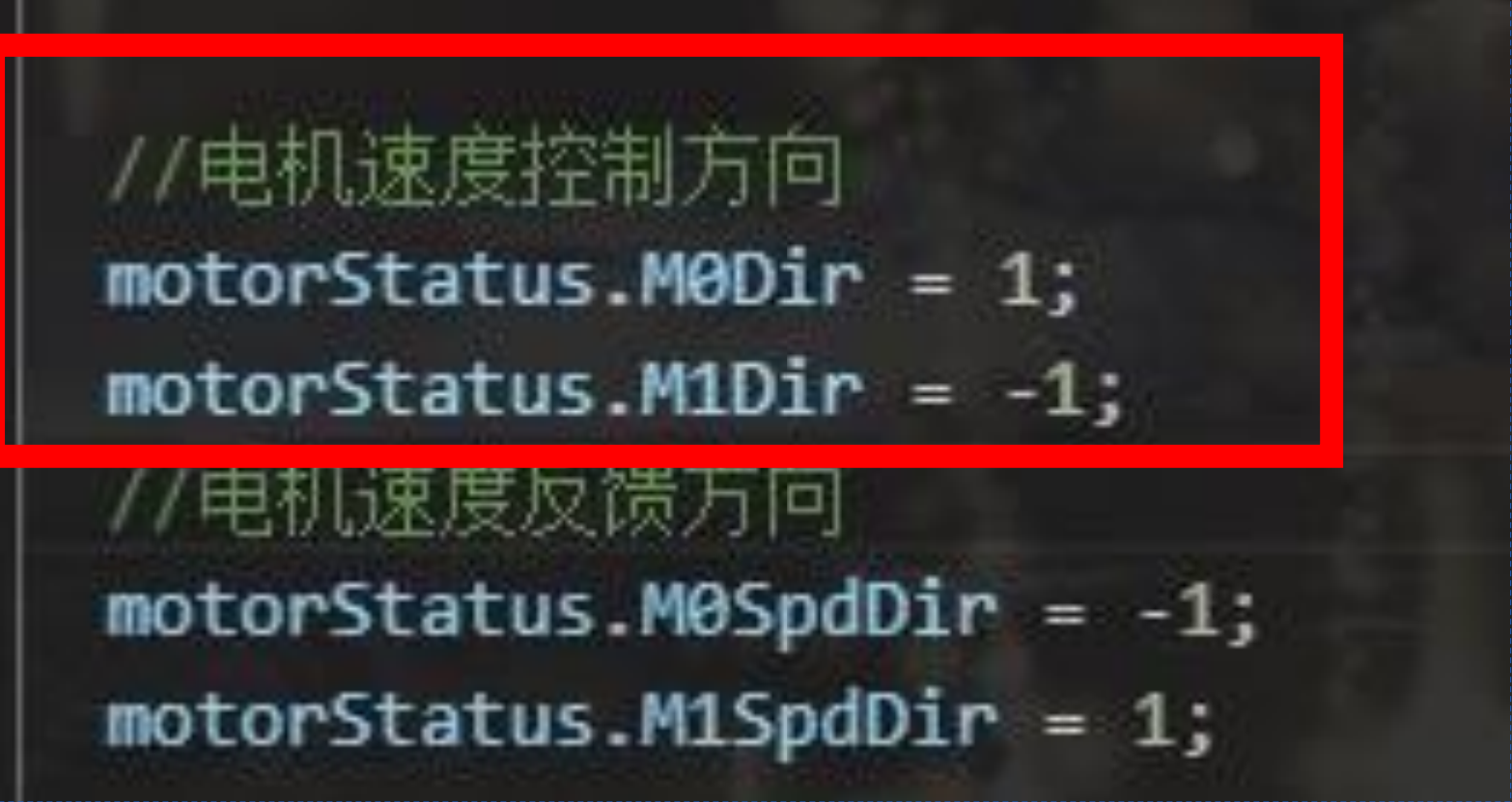
3. Configurar SpdDir
Defina uma direção de rotação fixa para os motores. No arquivo main, procure por motors.setTargets e defina o torque de motor 0 e motor 1 como 2.
Use o Vofa para visualizar as velocidades dos motores. Defina a taxa de transmissão do Vofa para 921600 e conecte a S3.

Grave o programa na S3, abra o Vofa (taxa de transmissão 921600), defina o A switch up do controle remoto para habilitar os motores, ligue a alimentação e segure o robô enquanto ele conclui a autoverificação. (Você pode primeiro verificar com Vofa–S1 para confirmar se a autoverificação foi concluída com sucesso.)
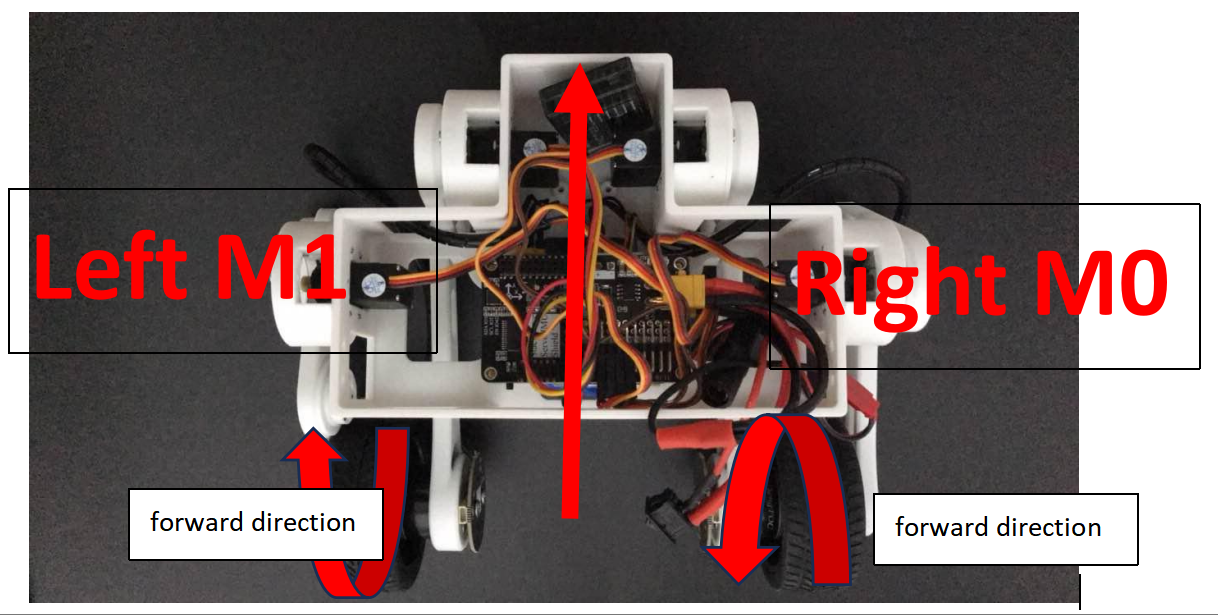
Verifique a rotação dos motores:
-
Motor esquerdo: a rotação para frente deve mostrar velocidade positiva.
Se o terceiro valor (velocidade M1) for negativo, invertamotorStatus.M1SpdDir. Se for positivo, nenhuma alteração é necessária. -
Motor direito: a rotação para trás deve mostrar velocidade negativa.
Se o segundo valor (velocidade M0) for negativo, nenhuma alteração é necessária. Se for positivo, invertamotorStatus.M0SpdDir.
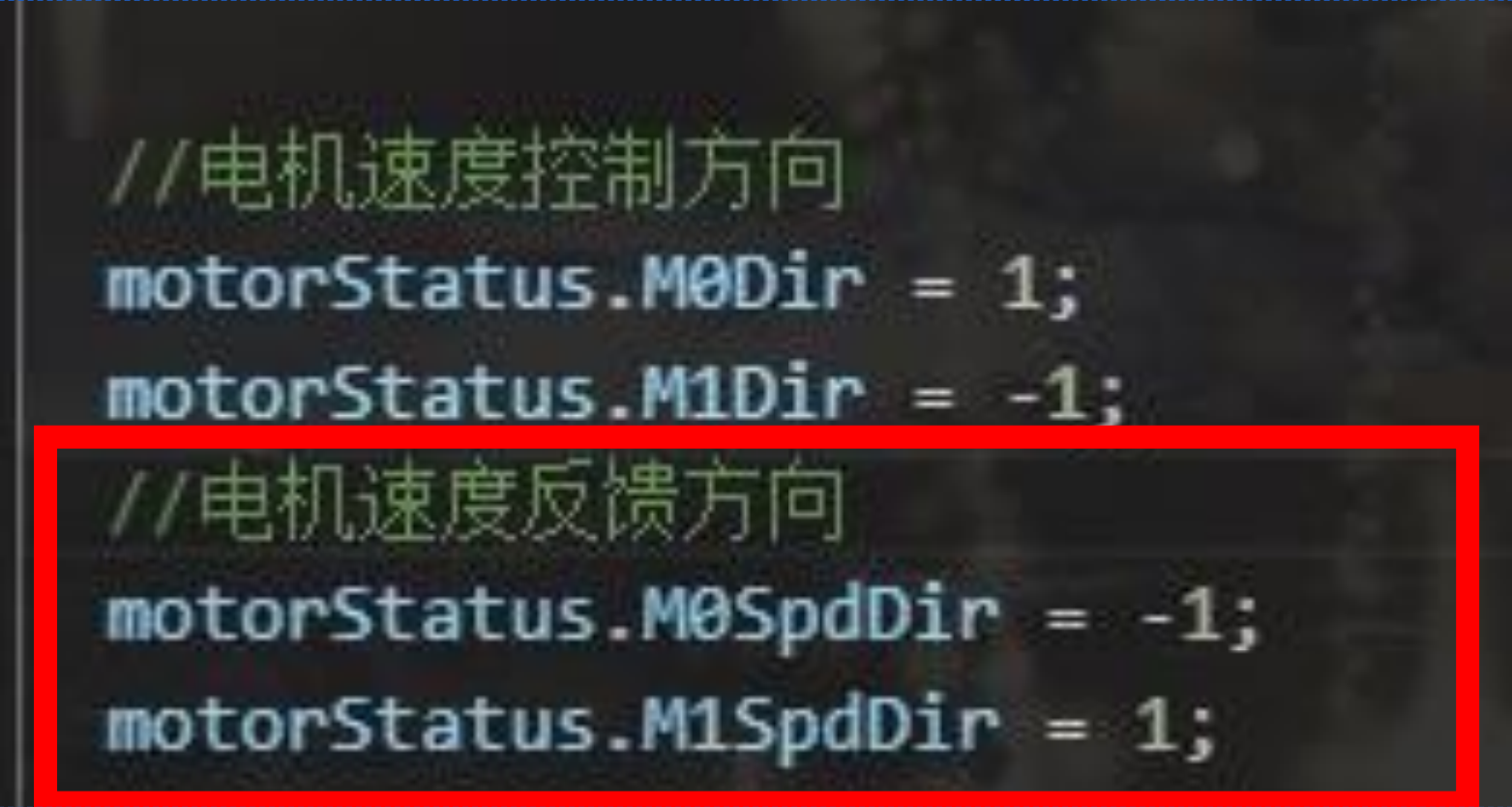
Se a explicação acima ainda não estiver clara, consulte as regras simplificadas abaixo:
Se a roda girar para frente e o Vofa mostrar um valor negativo, invert o dir de feedback.
Se a roda girar para frente e o Vofa mostrar um valor positivo, not altere o dir de feedback.
Se a roda girar para trás e o Vofa mostrar um valor positivo, invert o dir de feedback.
Se a roda girar para trás e o Vofa mostrar um valor negativo, not altere o dir de feedback.
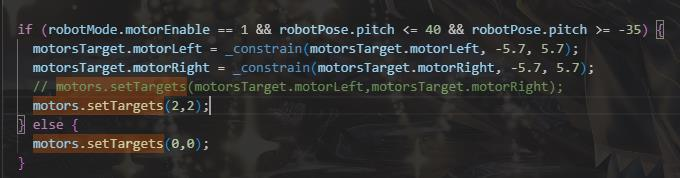
4. Configurar o dir de Controle do Motor (procure motors.setTargets)
Descomente a linha de controle do motor conforme mostrado na imagem e comente a linha abaixo dela, depois grave o programa.
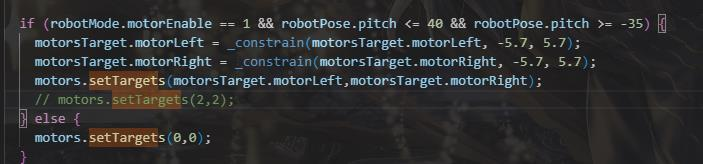
Ligue o robô. Após a conclusão do reset, incline o robô para frente enquanto o segura. Se ambas as rodas girarem para frente, a direção de equilíbrio está correta.
Se a roda esquerda girar para trás, invert M1Dir. A roda direita é ajustada da mesma forma.
Depois de concluir essas etapas, o robô já pode ser controlado. A seguir é descrito como operá-lo. Você também pode consultar o documento StackForce Wheeled_Legged_Robot Basic Operation Manual (PDF).
Joysticks frontais:
-
Etapa 1: Coloque a chave superior esquerda em
middle, a chave superior direita emdowne o stick inferior esquerdo na posiçãolowest. Segure o robô, deixe as pernas penduradas naturalmente, mantenha as rodas fora do chão e o corpo nivelado.Ligue a alimentação, aguarde cerca de
10 seconds, depois coloque o robô no chão e mantenha-o na posição vertical. -
Etapa 2: Coloque a chave superior direita em
middle, empurre o stick inferior esquerdoslightly upe coloque a chave superior esquerda emup. O robô entra no modo de autoequilíbrio.Use o stick inferior direito
forward/backpara mover para frente/trás eleft/rightpara virar à esquerda/direita.Use o stick inferior esquerdo
up/downpara ajustar a altura das pernas.Quando a chave superior direita estiver na posição
top, mova o stick inferior esquerdoleft/rightpara controlar o rolamento. Desligue a alimentação para sair do modo de rolamento.
Demonstração ao Vivo
(Vídeo de demonstração real a ser adicionado)
Citação
StackForce Wheeled_Legged_Robot Basic Operation Manual (PDF)
Mini-Wheeled-legged robot installation document.pdf
Conjunto completo de esquemáticos da placa de controle
Projetos de exemplo para o kit de desenvolvimento
Aquisição de código de registro do cliente
Pacote de Ferramentas do Robô com Rodas-pernas
Suporte Técnico & Discussão sobre o Produto
Obrigado por escolher nossos produtos! Estamos aqui para lhe fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.