Treinando a Política do SoArm101 com IsaacLab
Introdução
Este wiki apresenta como usar o Isaac Lab para treinar e testar políticas de braço robótico SO-ARM100/101 com aprendizado por reforço.
📌Pré-requisitos
- Um PC com Ubuntu e GPU Nvidia
Se você não tiver drivers CUDA ou o Conda instalados, configure-os primeiro.
Primeiros Passos
🚀 Etapa 1. Instalar o Isaac Lab
NVIDIA Isaac™ Lab é um framework unificado de código aberto para aprendizado de robôs que ajuda pesquisadores e desenvolvedores a treinar políticas robóticas de forma eficiente.
Execute os seguintes comandos no terminal do PC com Ubuntu:
# Create and activate Conda environment
conda create -n isaaclab python=3.10
conda activate isaaclab
# Install PyTorch (GPU version)
pip install torch==2.7.0 torchvision==0.22.0 --index-url https://download.pytorch.org/whl/cu128
# Upgrade pip
pip install --upgrade pip
# Install Isaac Sim (with extensions)
pip install 'isaacsim[all,extscache]==4.5.0' --extra-index-url https://pypi.nvidia.com
# Clone IsaacLab repository
cd ~/Documents
git clone https://github.com/isaac-sim/IsaacLab.git
# Install dependencies
sudo apt install cmake build-essential
# Initialize setup
cd IsaacLab
./isaaclab.sh --install
Execute o seguinte comando para verificar a instalação:
./isaaclab.sh -p scripts/tutorials/00_sim/create_empty.py
Se tudo der certo, uma janela vazia do Isaac Sim deve aparecer.
🤖 Etapa 2. Instalar o Projeto isaac_so_arm101
Este repositório implementa tarefas para os robôs SO‑ARM100 e SO‑ARM101 usando o Isaac Lab. Ele serve como base para vários tutoriais da série LycheeAI Hub Project: SO‑ARM101 × Isaac Sim × Isaac Lab.
Execute os seguintes comandos:
cd ~/Documents
git clone https://github.com/MuammerBay/isaac_so_arm101.git
cd isaac_so_arm101
# Install project dependencies
python -m pip install -e source/SO_100
# Test environments
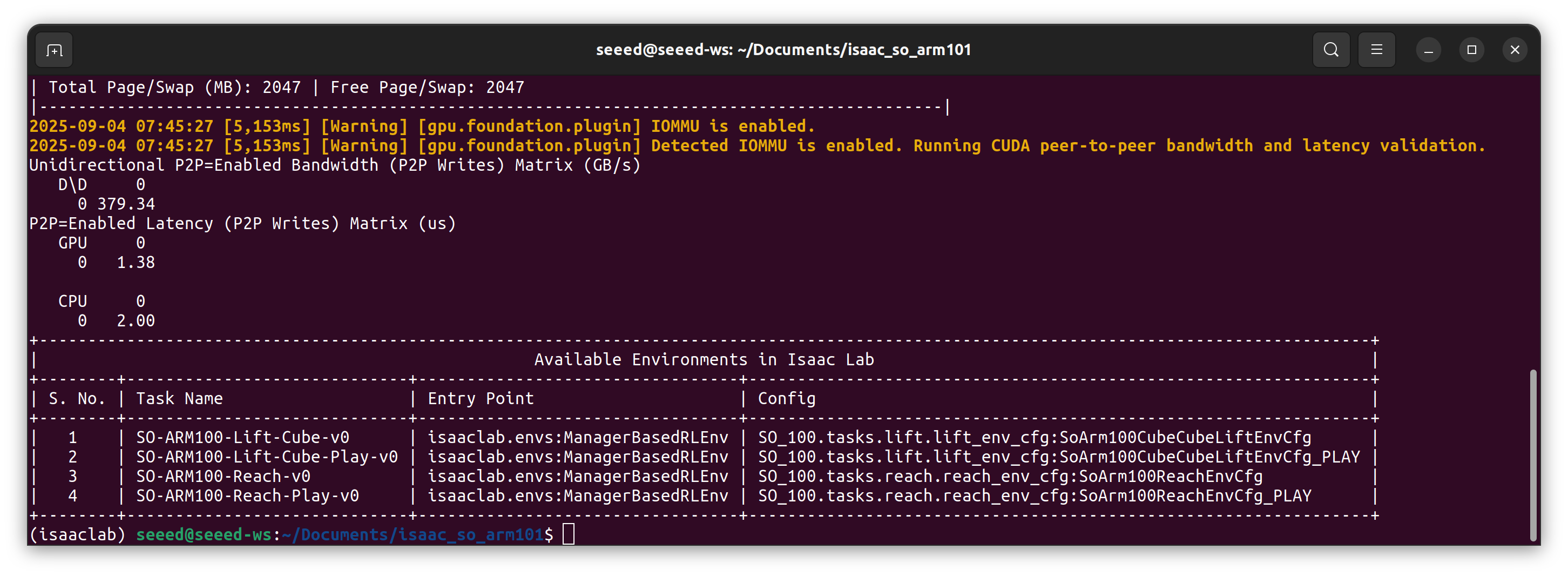
python scripts/list_envs.py
Se o projeto isaac_so_arm101 for instalado com sucesso, a janela do terminal exibirá o seguinte log:
🎯 Etapa 3. Iniciar o Treinamento
Inicie o treinamento com:
python scripts/rsl_rl/train.py --task SO-ARM100-Reach-v0
Isso abrirá uma janela do Isaac Sim onde você pode observar o processo de treinamento em tempo real. Você pode adicionar o parâmetro --headless ao comando de inicialização para acelerar o processo de treinamento.
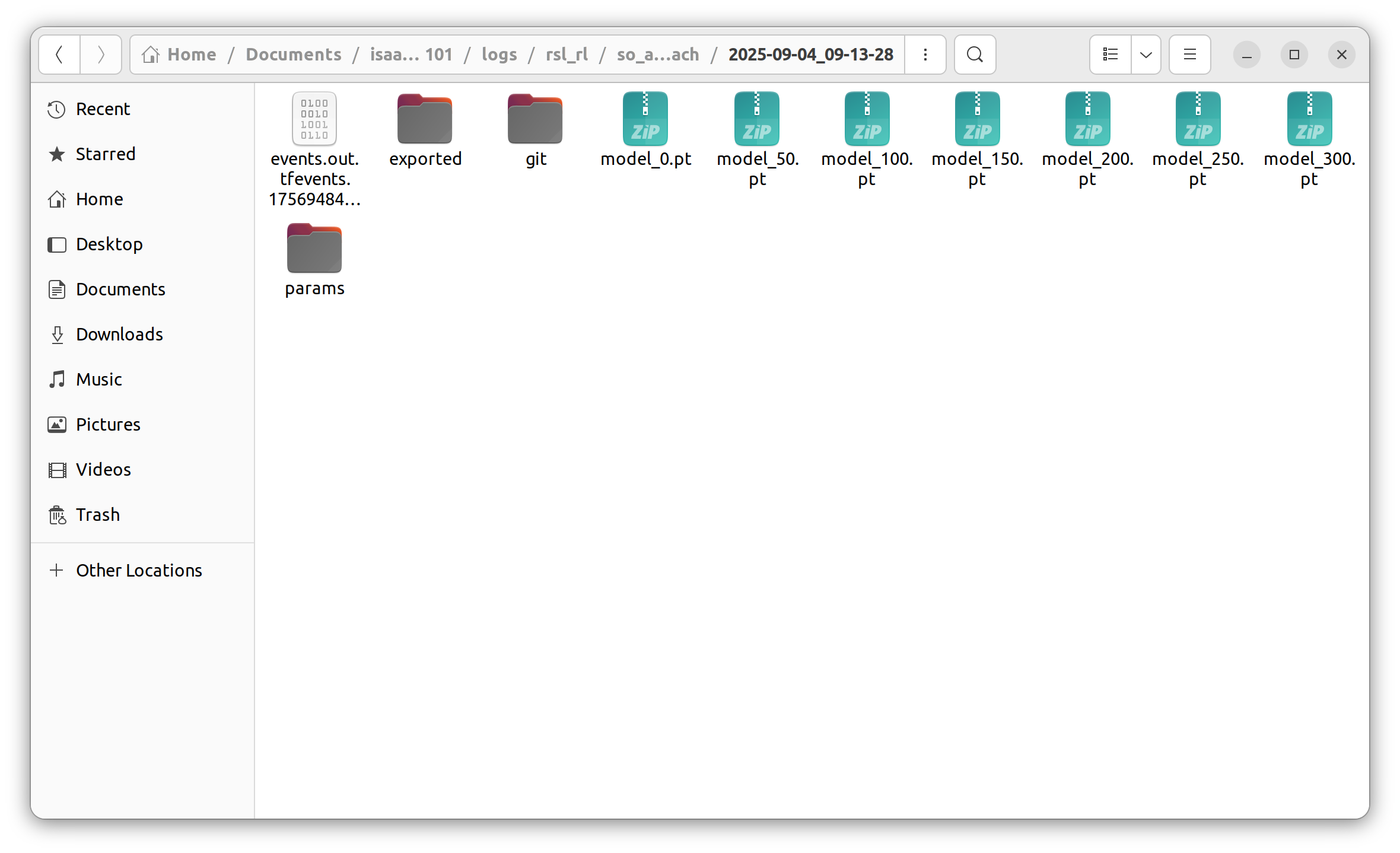
Após o treinamento, os pesos do modelo serão salvos em:
~/Documents/isaac_so_arm101/logs/rsl_rl/so_arm100_reach
🧪 Etapa 4. Testar o Modelo
Teste o modelo treinado com:
python scripts/rsl_rl/play.py --task SO-ARM100-Reach-Play-v0
Durante o teste, posições-alvo são geradas aleatoriamente dentro de um intervalo definido, e o modelo treinado controla o braço robótico para alcançar esses alvos.
Referências
- https://lycheeai-hub.com/project-so-arm101-x-isaac-sim-x-isaac-lab-tutorial-series
- https://github.com/MuammerBay/isaac_so_arm101
- https://github.com/huggingface/lerobot
- https://github.com/isaac-sim/IsaacLab
- https://github.com/leggedrobotics/rsl_rl
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para oferecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.