Viseron no reComputer
Introdução
Viseron é um software de NVR e Visão Computacional com IA, auto-hospedado e apenas local, implementado em Python. O objetivo do Viseron é ser fácil de configurar e usar, e ao mesmo tempo poderoso e flexível. Ele é projetado para ser executado em uma rede local, sem dependências externas e sem necessidade de serviços em nuvem.
Pré-requisitos
Requisitos de Hardware
| reComputer AI R2130 | reComputer AI Industrial R2145 |
|---|---|
 |  |
Requisitos de Software
Atualizar o sistema
Use o seguinte comando para executar.
sudo apt update
sudo apt upgrade -y
Baixar docker e docker compose
Use o seguinte comando para instalar o docker.
wget https://get.docker.com -O get-docker.sh
chmod +x
sudo sh get-docker.sh
sudo systemctl start docker
sudo systemctl enable docker
docker --version
O resultado é mostrado abaixo:

Use o seguinte comando para instalar o docker compose.
sudo curl -L "https://github.com/docker/compose/releases/download/$(curl -s https://api.github.com/repos/docker/compose/releases/latest | jq -r .tag_name)/docker-compose-$(uname -s)-$(uname -m)" -o /usr/local/bin/docker-compose
sudo chmod +x /usr/local/bin/docker-compose
docker-compose --version
O resultado é mostrado abaixo:

Baixar Viseron
Criar pastas
Use o seguinte comando para criar pastas
cd ~
mkdir -p viseron_data/{timelapse,thumbnails,snapshots,segments,models,event_clips,config}
Baixar Modelo
Use o seguinte comando para baixar o modelo hef para o dispositivo hailo8.
cd ~/viseron_data/models
wget https://hailo-model-zoo.s3.eu-west-2.amazonaws.com/ModelZoo/Compiled/v2.16.0/hailo8/yolov8n.hef
Criar docker-compose.yaml
Use o seguinte comando para criar docker-compose.yaml.
cd ~ && nano docker-compose.yaml
services:
viseron:
image: roflcoopter/viseron:latest
container_name: viseron
shm_size: "1024mb"
volumes:
- /home/ain/viseron_data/segments:/segments
- /home/ain/viseron_data/snapshots:/snapshots
- /home/ain/viseron_data/thumbnails:/thumbnails
- /home/ain/viseron_data/event_clips:/event_clips
- /home/ain/viseron_data/timelapse:/timelapse
- /home/ain/viseron_data/config:/config
- /etc/localtime:/etc/localtime:ro
- /home/ain/viseron_data/models:/models
ports:
- 8888:8888
devices:
- /dev/hailo0
Configurar Viseron
Executar Viseron
Use o seguinte comando para executar o viseron
cd ~
docker compose up
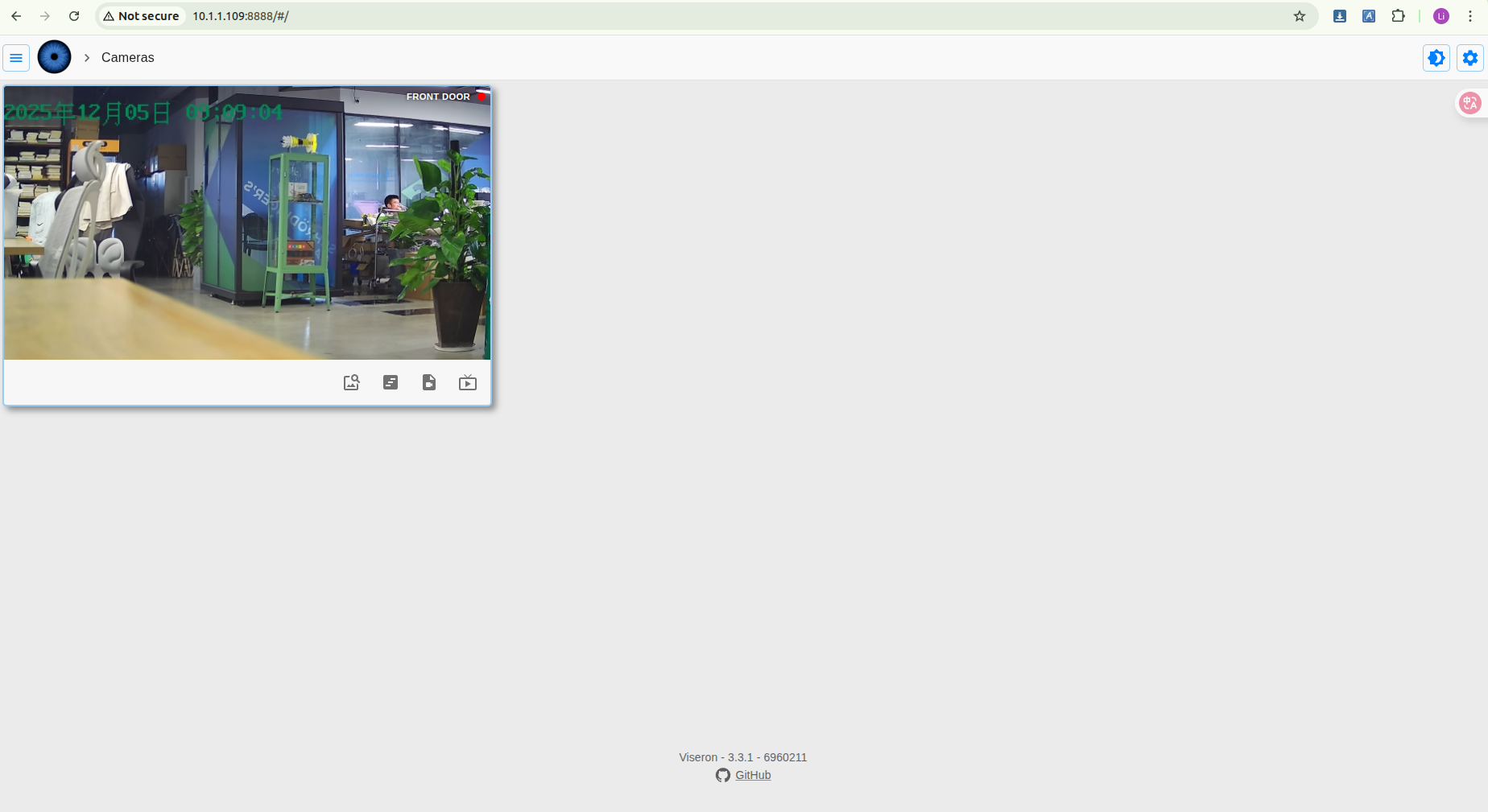
Abrir porta
Abra a porta 8888, você verá um resultado como abaixo:
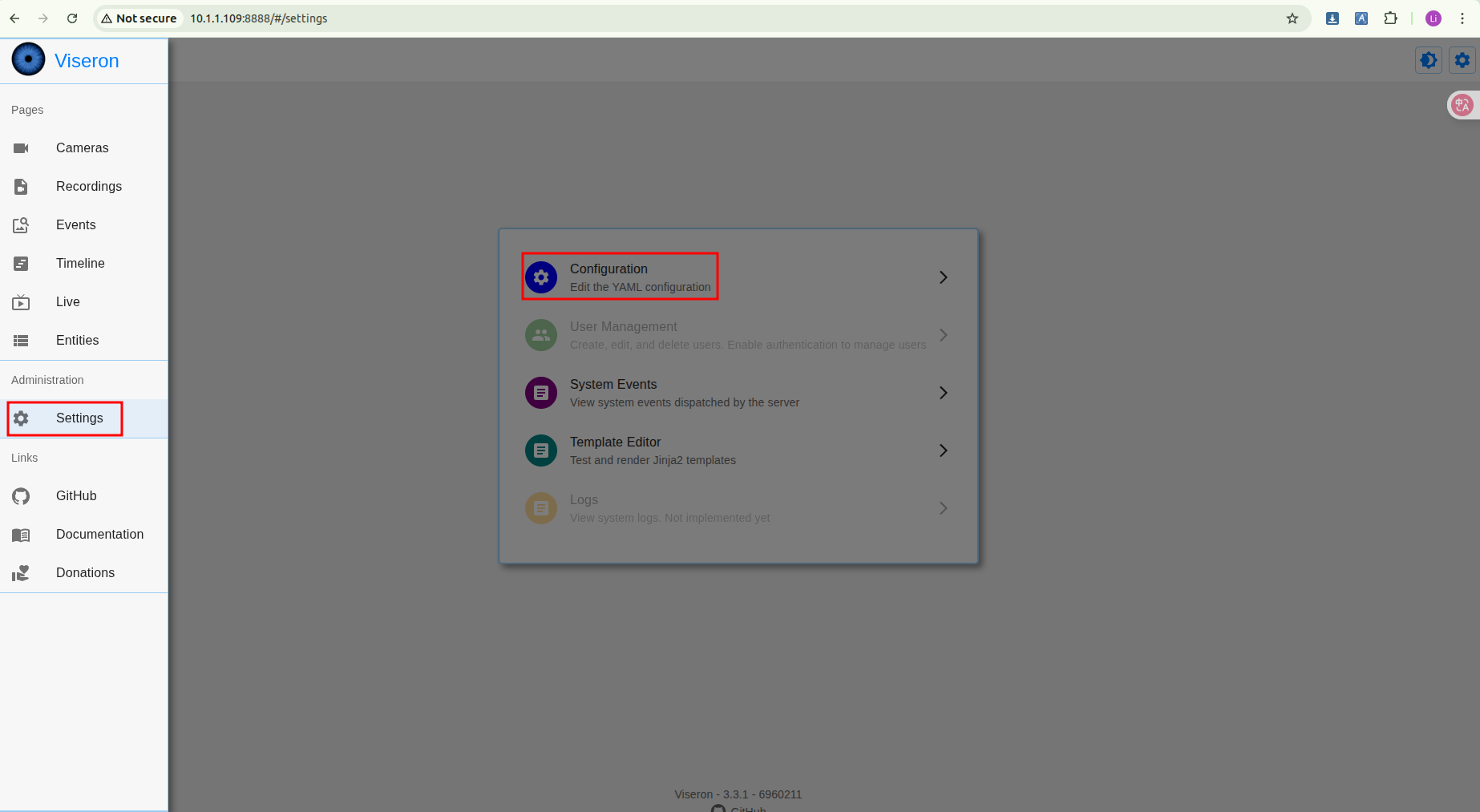
Configurar
Siga as etapas abaixo para configurar o Viseron e substitua as informações de configuração de acordo com o endereço da sua câmera.
# Viseron Configuration Example - Resolving Hailo component and camera identifier mismatch
# Core concept: All components use the same camera identifier "cam_front"
# 1. Camera Configuration (FFmpeg Component)
# This is the foundation for all detection features. Ensure the identifier here is correctly referenced by other components.
ffmpeg:
camera:
cam_front: # 🔑 Key identifier: other components must reference this name
name: "Front Door" # Camera display name (customizable)
host: 10.1.1.200 # IP address of the camera
port: 554 # RTSP port (usually 554)
path: /cam/realmonitor?channel=1&subtype=1 # RTSP stream path (replace with your camera's actual path)
username: admin
password: passw0rd
fps: 6 # Set the video stream frame rate
recorder:
idle_timeout: 1 # Idle timeout setting
codec: h264 # Recording codec
# 2. Hailo Object Detector Configuration
# This component uses Hailo-8 AI acceleration hardware for object detection and must point to a configured camera.
hailo:
object_detector:
model_path: /models/yolov8n.hef # 🔑 Important: Replace with the path to your HEF model file
# Add the following line based on your Hailo hardware version (e.g., hailo8 or hailo8l)
# hailo_arch: hailo8
cameras:
cam_front: # ⬅️ Must exactly match the identifier defined in the ffmpeg section above
fps: 2 # Detection frame rate (higher consumes more resources)
scan_on_motion_only: false # Set to true to perform AI detection only when motion is detected
labels:
- label: person # Detect the "person" class
confidence: 0.7 # Confidence threshold
trigger_event_recording: true # Trigger event recording when detected
- label: car # You can add other classes to detect
confidence: 0.7
# 3. Motion Detector Configuration (MOG2 Component)
# Can provide pre-triggering for Hailo AI detection to save computational resources.
mog2:
motion_detector:
cameras:
cam_front: # ⬅️ Use the same consistent identifier
fps: 2 # Motion detection frame rate
# 4. NVR (Network Video Recorder) Configuration
# Binds all the above components together and manages recording.
nvr:
cam_front: # ⬅️ Use the same consistent identifier
motion_detector: # Enable motion detection
enabled: true
object_detector: # Enable object detection
enabled: true
interval: 0.5 # Object detection trigger interval
# (Optional) Logger level adjustment, can be set to 'debug' for troubleshooting
logger:
default_level: info
Executar
Siga as etapas abaixo para executar o software.
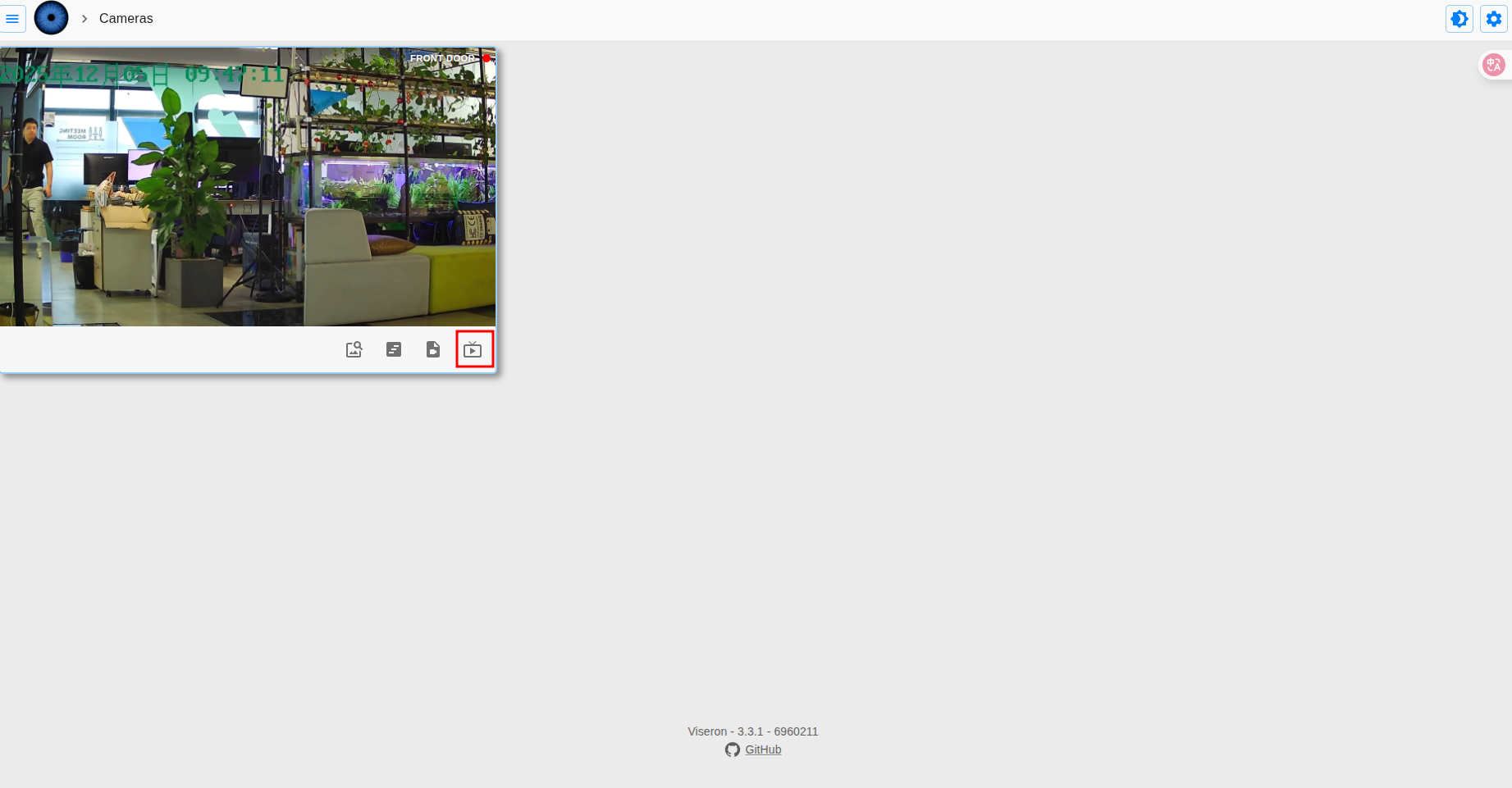
Resultado
Depois de configurar tudo, podemos visualizar a transmissão ao vivo da câmera atual. Definimos o fps para 2, portanto o vídeo pode parecer um pouco travado.
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.