Relógio Oco Alimentado por Seeed Studio XIAO RA4M1
A inspiração surge
Hollow Clock ganhou grande popularidade no YouTube há algum tempo, com o design original de sh1ura,vídeo de demonstração legal e o projeto 3D disponível no Thingsverse. Um grande agradecimento a sh1ura por essa ótima inspiração. Apoiando-nos nos ombros de gigantes, agora remixamos uma versão usando o XIAO RA4M1 do tamanho de um polegar e uma placa de driver de motor personalizada, menor!
Visão Geral de Hardware
MCU
| Seeed Studio XIAO RA4M1 |
|---|
 |
Placa de Circuito
Com o mesmo volume do XIAO, basta soldar o soquete principal e inserir o XIAO e o motor nele para operar.
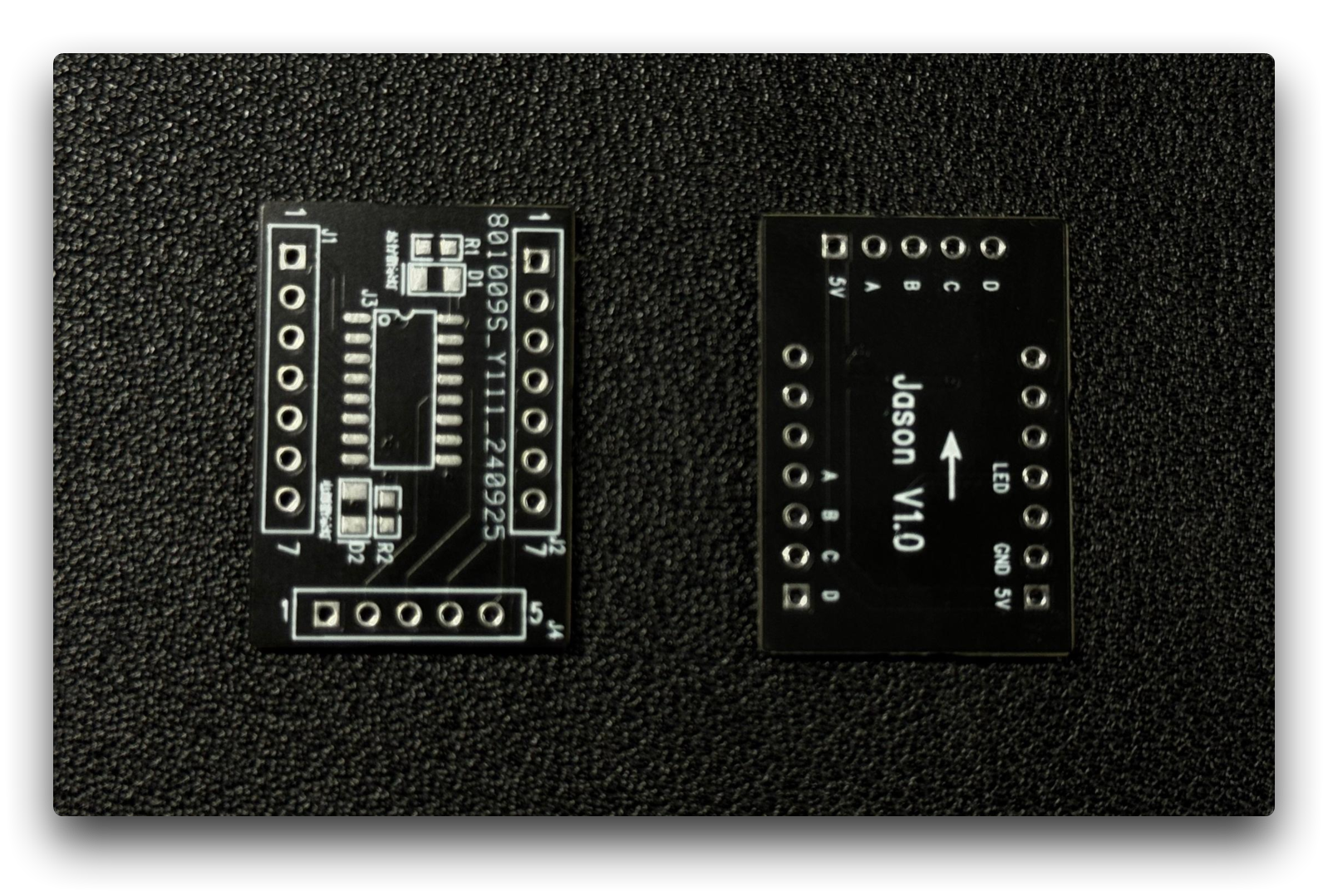
Informações específicas estão no recurso ao final.
Tanto os motores quanto os componentes precisam ser comprados por conta própria.
Visão Geral de Software
// This code controls a stepper motor for a clock project,
// allowing the minute hand to rotate accurately based on time.
// Please tune the following value if the clock gains or loses time.
// Theoretically, the standard value is 60000 milliseconds per minute.
#define MILLIS_PER_MIN 60000 // milliseconds per a minute
// Motor and clock parameters
// Total steps for a full turn of the minute rotor
// Calculated as 4096 steps per revolution * 90 degrees / 12 hours
#define STEPS_PER_ROTATION 30720 // steps for a full turn of minute rotor
// Wait time for a single step of the stepper motor
int delaytime = 2;
// Ports used to control the stepper motor
// If your motor rotates in the opposite direction,
// change the order of the port numbers as needed.
int port[4] = {0, 1, 2, 3};
// Sequence of stepper motor control
// This array defines the control sequence for the motor phases.
int seq[8][4] = {
{ LOW, HIGH, HIGH, LOW},
{ LOW, LOW, HIGH, LOW},
{ LOW, LOW, HIGH, HIGH},
{ LOW, LOW, LOW, HIGH},
{ HIGH, LOW, LOW, HIGH},
{ HIGH, LOW, LOW, LOW},
{ HIGH, HIGH, LOW, LOW},
{ LOW, HIGH, LOW, LOW}
};
// Function to rotate the stepper motor based on the specified number of steps
void rotate(int step) {
static int phase = 0;
int i, j;
int delta = (step > 0) ? 1 : 7; // Determine direction of rotation
int dt = 20; // Initial delay time
step = (step > 0) ? step : -step; // Convert to positive step count
for(j = 0; j < step; j++) {
phase = (phase + delta) % 8; // Update phase
for(i = 0; i < 4; i++) {
digitalWrite(port[i], seq[phase][i]); // Control the motor
}
delay(dt); // Wait for the specified delay
if(dt > delaytime) dt--; // Gradually decrease delay
}
// Power cut: stop the motor
for(i = 0; i < 4; i++) {
digitalWrite(port[i], LOW);
}
}
// Setup function, runs once at startup
void setup() {
// Initialize motor control ports as outputs
pinMode(port[0], OUTPUT);
pinMode(port[1], OUTPUT);
pinMode(port[2], OUTPUT);
pinMode(port[3], OUTPUT);
// Perform initial approach runs to position the minute hand
rotate(-20); // Approach run in one direction
rotate(20); // Approach run in the opposite direction
rotate(STEPS_PER_ROTATION / 60); // Position the minute hand
}
// Main loop, runs continuously
void loop() {
static long prev_min = 0, prev_pos = 0; // Track previous minute and position
long min;
static long pos;
min = millis() / MILLIS_PER_MIN; // Get the current minute
if(prev_min == min) {
return; // Exit if the minute hasn't changed
}
prev_min = min; // Update previous minute
pos = (STEPS_PER_ROTATION * min) / 60; // Calculate target position
rotate(-20); // Approach run in one direction
rotate(20); // Approach run in the opposite direction
if(pos - prev_pos > 0) {
rotate(pos - prev_pos); // Rotate to the new position if needed
}
prev_pos = pos; // Update previous position
}
-
Garantir as conexões do motor de passo: Conecte os quatro fios de controle do motor de passo às portas especificadas na matriz de portas (0, 1, 2, 3).
-
Ajustar as configurações de tempo: Ajuste o valor de MILLIS_PER_MIN de acordo com as condições reais para garantir que o relógio esteja preciso. Se o relógio estiver adiantado ou atrasado, ajuste esse valor em conformidade.
-
Confirmar o cálculo de passos: Certifique-se de que o valor de STEPS_PER_ROTATION seja corretamente calculado com base na contagem real de passos do seu motor e no projeto do sistema.
-
Ajustar o tempo de atraso: O delaytime controla o atraso entre cada passo. Faça um ajuste fino desse parâmetro com base no desempenho e nos requisitos do motor para otimizar a operação.
-
Configurações da sequência de controle: A matriz seq define a sequência de controle para o motor de passo. Se o motor girar na direção errada, você pode ajustar os valores nessa matriz.
-
Descrições das funções: rotate(int step): Controla o motor para girar um número especificado de passos. Você pode passar valores positivos ou negativos para controlar a direção. O motor diminuirá gradualmente o atraso após cada rotação para aumentar a velocidade.
-
setup(): Executa uma vez na inicialização para inicializar as portas de controle e realizar o posicionamento inicial. Esta é uma etapa necessária para configurar o motor.
-
loop(): O loop principal que é executado continuamente para calcular o minuto atual e atualizar a posição do ponteiro de minutos. Esta função chamará a função rotate() para girar o ponteiro a cada atualização de minuto.
-
Certifique-se de que a fonte de alimentação seja adequada para o seu motor de passo e verifique se todas as conexões estão corretas.
-
Durante os testes, monitore a operação do motor para garantir que ele funcione como esperado e faça ajustes conforme necessário.
Se você tiver mais ideias e modificações, sinta-se à vontade para apresentá-las usando a série XIAO!
Recurso
- 📄 [SCH] Placa Driver de Motor
- 📄 [PCB] Placa Driver de Motor
- 📄 [3D] Modelagem 3D do Relógio
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para oferecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.