reComputer Industrial J40, J30 Hardware and Interfaces Usage
This wiki introduces the various different hardware and interfaces on the reComputer Industrial J4012, J4011, J3011, J3010 and how to use them to expand your project ideas.
CSI Cameras
reComputer Industrial is equipped with 2x 2-lane 15pin MIPI CSI camera connectors and the below cameras are supported
-
IMX219 cameras
-
IMX477 cameras
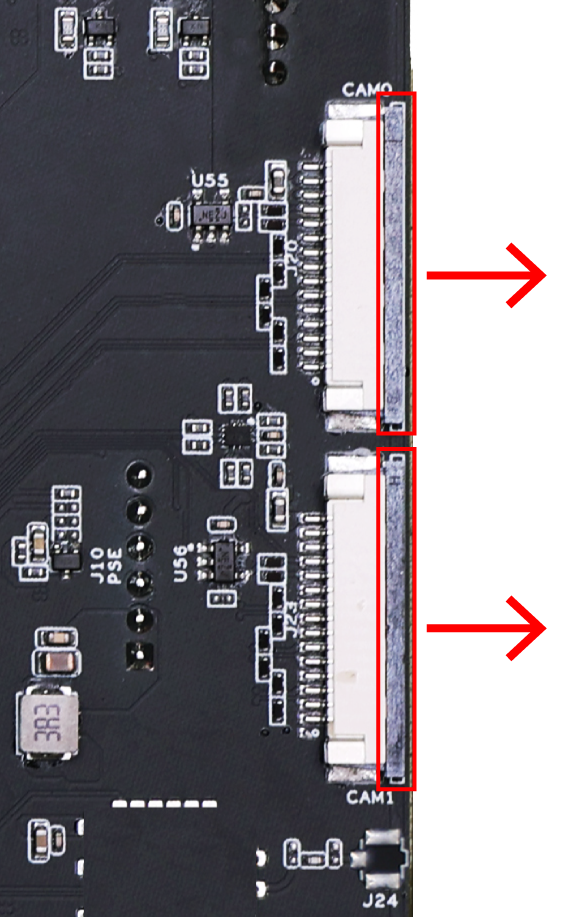
Connection Overview
Here the 2 CSI camera connectors are marked as CAM0 and CAM1. You can either connect one camera to any connector out of the 2 or connect 2 cameras to both the connectors at the same time.
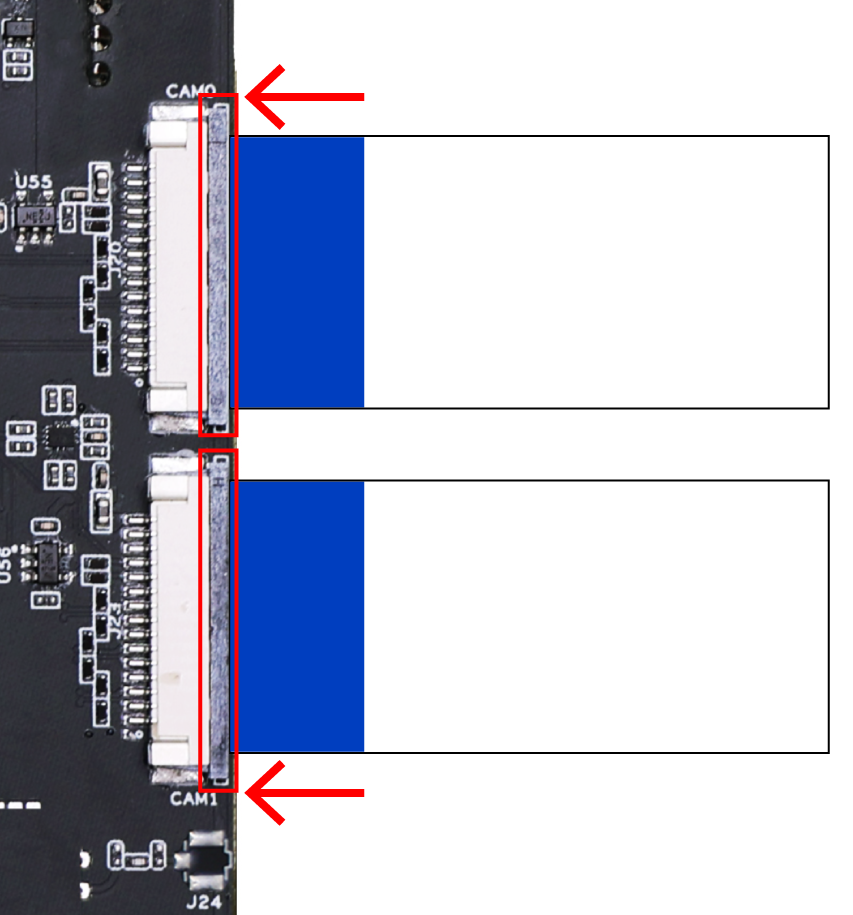
Step 1: Gently pull out the black color lock on the CSI connector
Step 2: Insert the 15-pin ribbon cable into the connector making sure the gold fingers are facing downwards
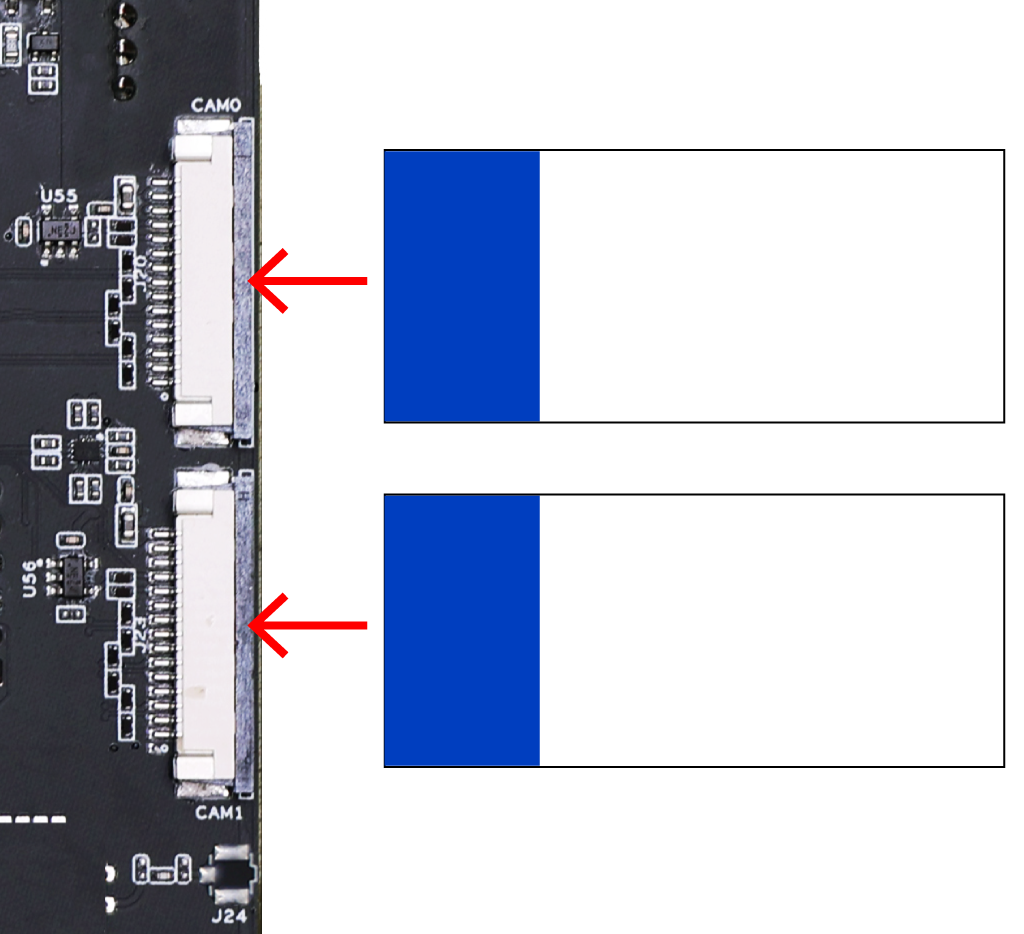
Step 3: Push in the black color lock to lock the ribbon cable in place
Usage
First you need to configure the board to load the appropriate driver for the specific camera that you will be using. For this JetPack system has an in-built tool to support IMX219 an IMX477 cameras.
Step 1: Open the terminal and execute the following
sudo /opt/nvidia/jetson-io/jetson-io.py
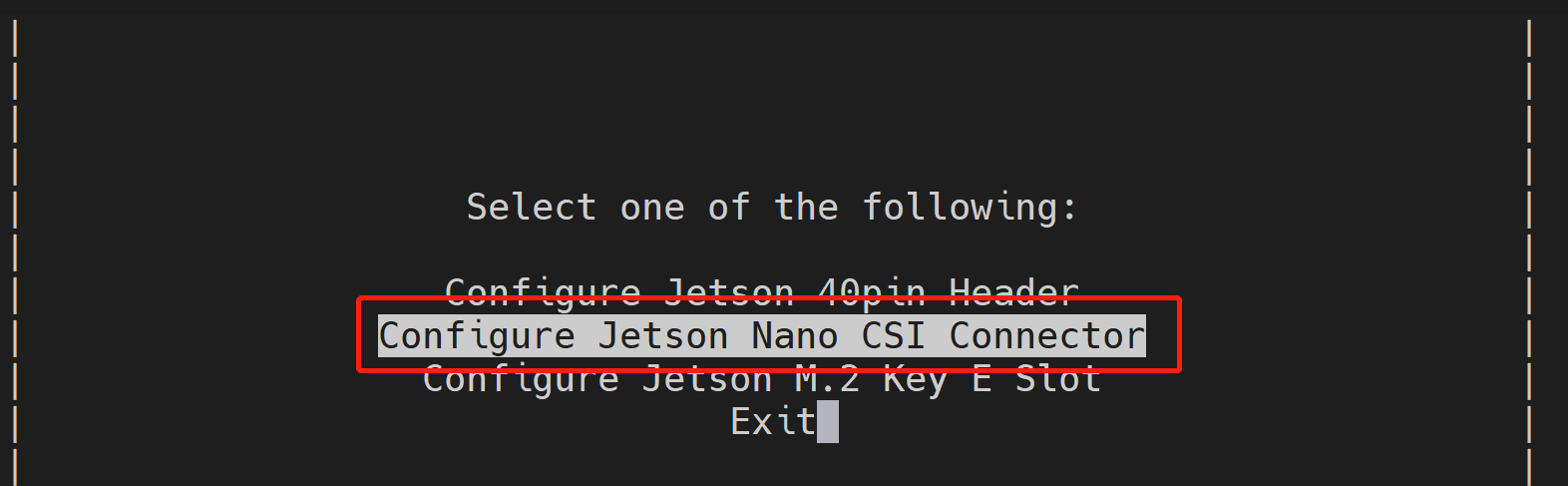
Step 2: Select Configure Jetson Nano CSI Connector
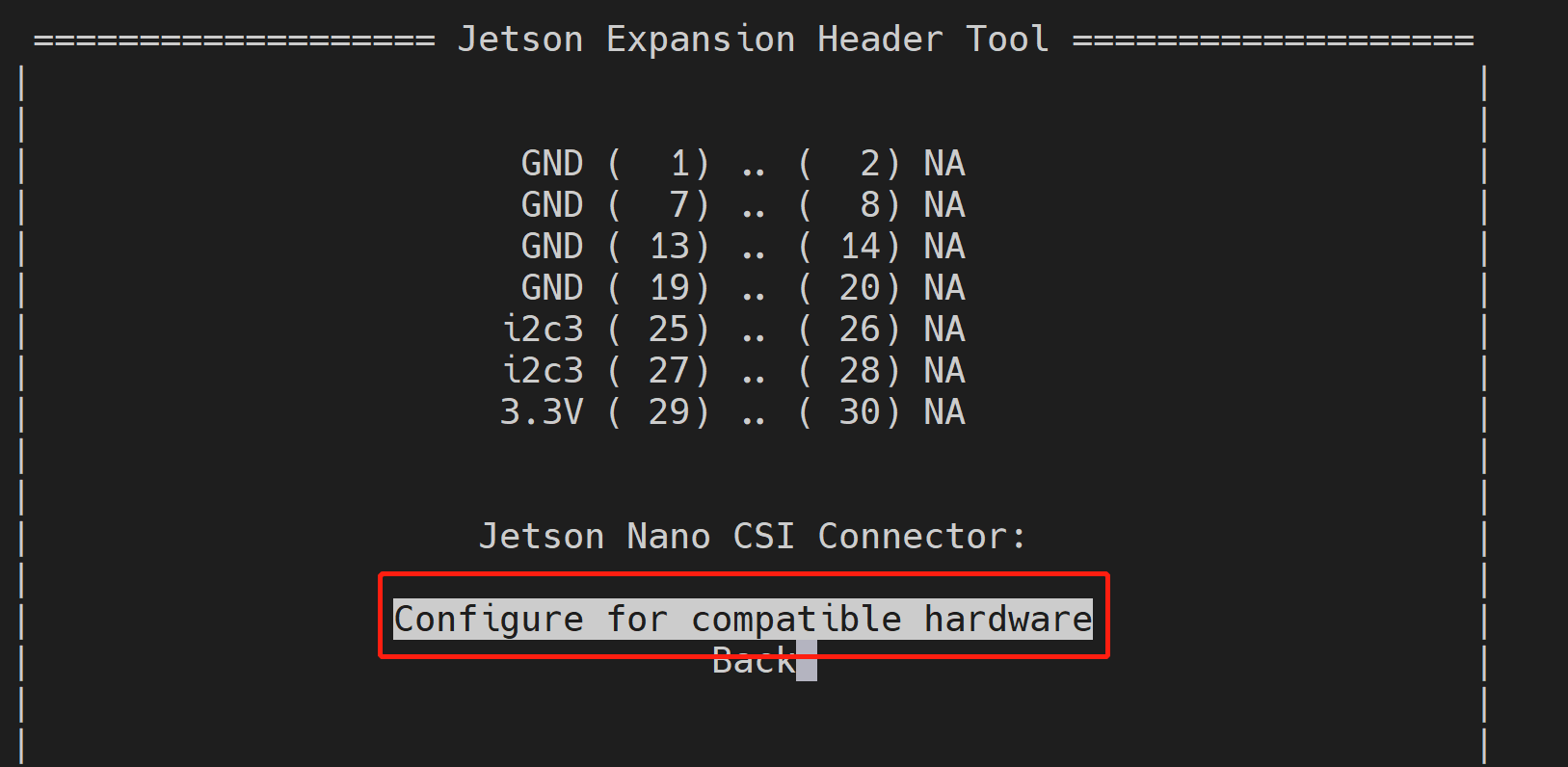
Step 3: Select Configure for compatible hardware
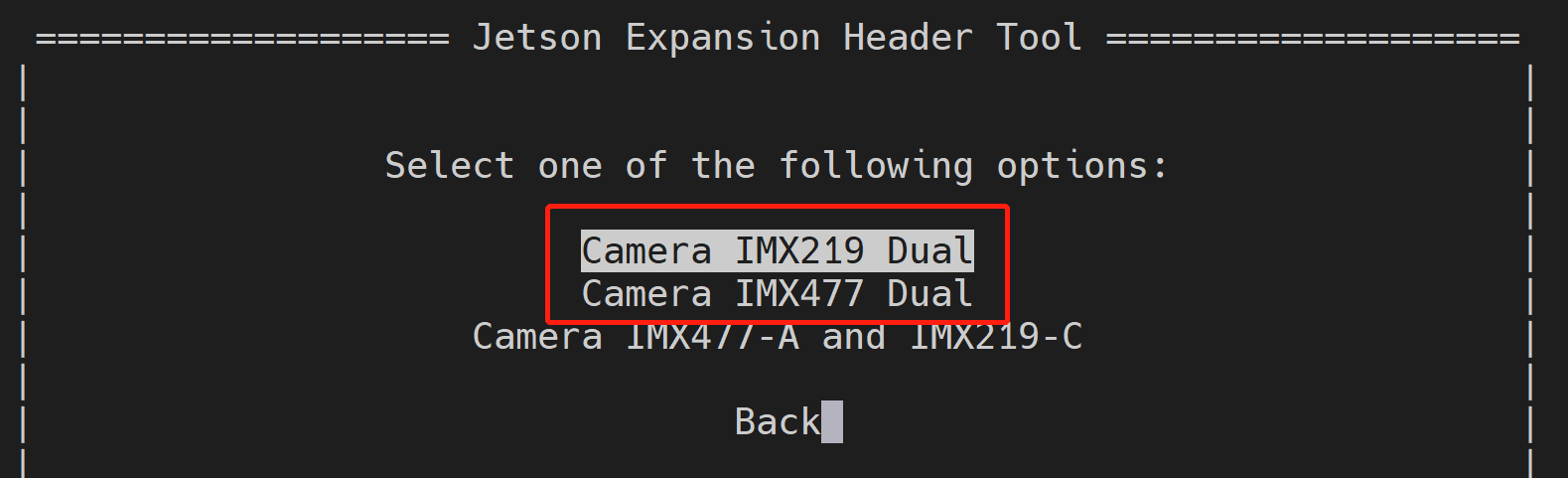
Step 4: Select the camera that you want to use
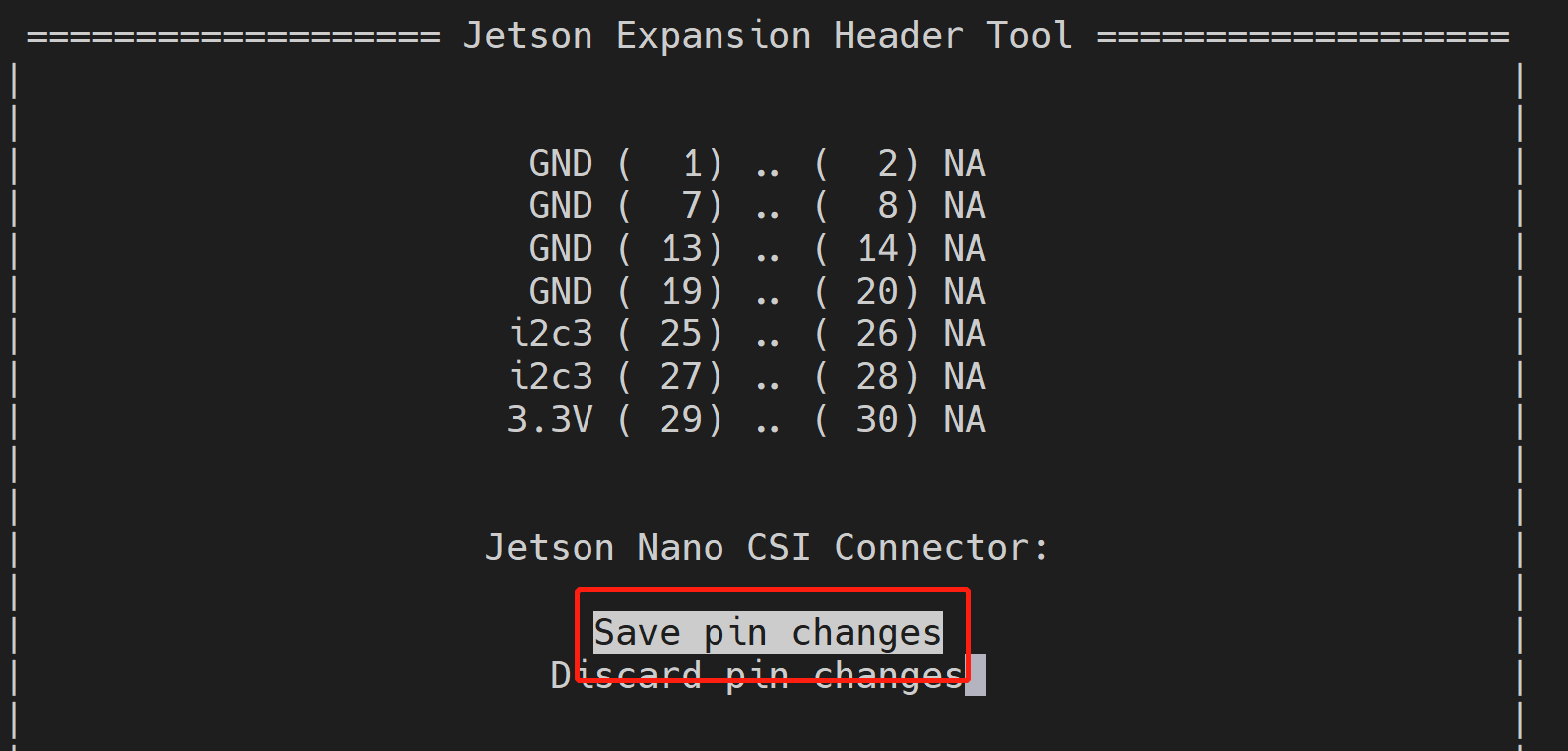
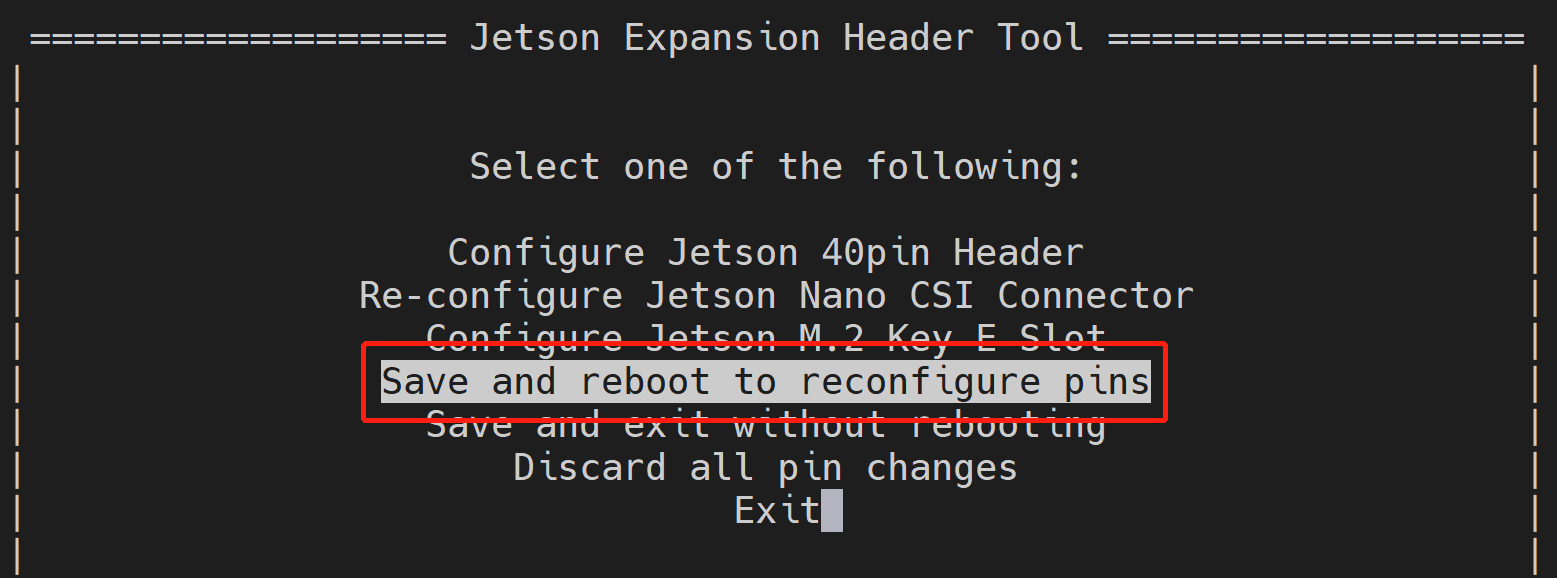
Step 5: Select Save pin changes
Step 6: Select Save and reboot to reconfigure pins
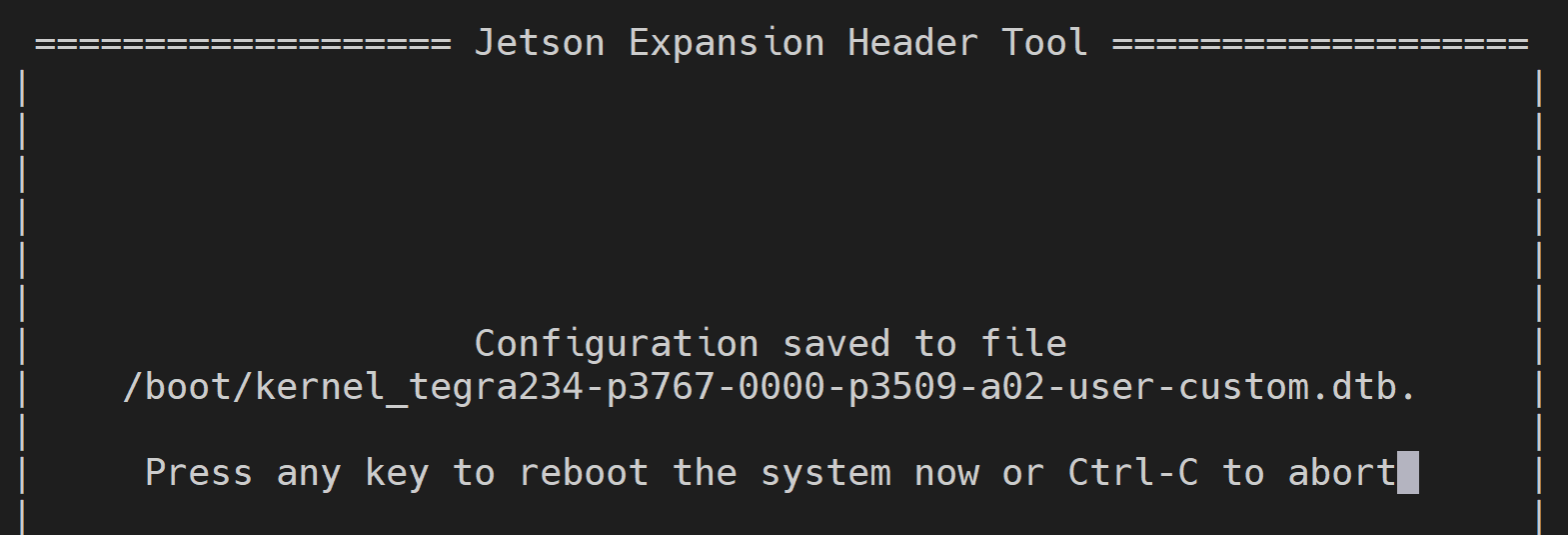
Step 7: Press any key on the keyboard and the device will reboot with the applied camera configuration
You can use CSI cameras in 2 different methods. Follow the below commands according to the camera connector.
- Method 1
- Method 2
For CAM0 port
nvgstcapture-1.0 sensor-id=0
For CAM1 port
nvgstcapture-1.0 sensor-id=1
If you want to change further settings of the camera, you can type "nvgstcapture-1.0 --help" to access all the configurable options available
For CAM0 port
gst-launch-1.0 nvarguscamerasrc sensor-id=0 sensor-mode=0 ! 'video/x-raw(memory:NVMM),width=1920, height=1080, framerate=20/1, format=NV12' ! nvvidconv ! xvimagesink
For CAM1 port
gst-launch-1.0 nvarguscamerasrc sensor-id=1 sensor-mode=0 ! 'video/x-raw(memory:NVMM),width=1920, height=1080, framerate=20/1, format=NV12' ! nvvidconv ! xvimagesink
If you want to change further settings of the camera, you can update the arguments such as width, height, framerate, format, etc.
RTC
reComputer Industrial is equipped with 2 different ways to connect to an RTC battery
Connection Overview
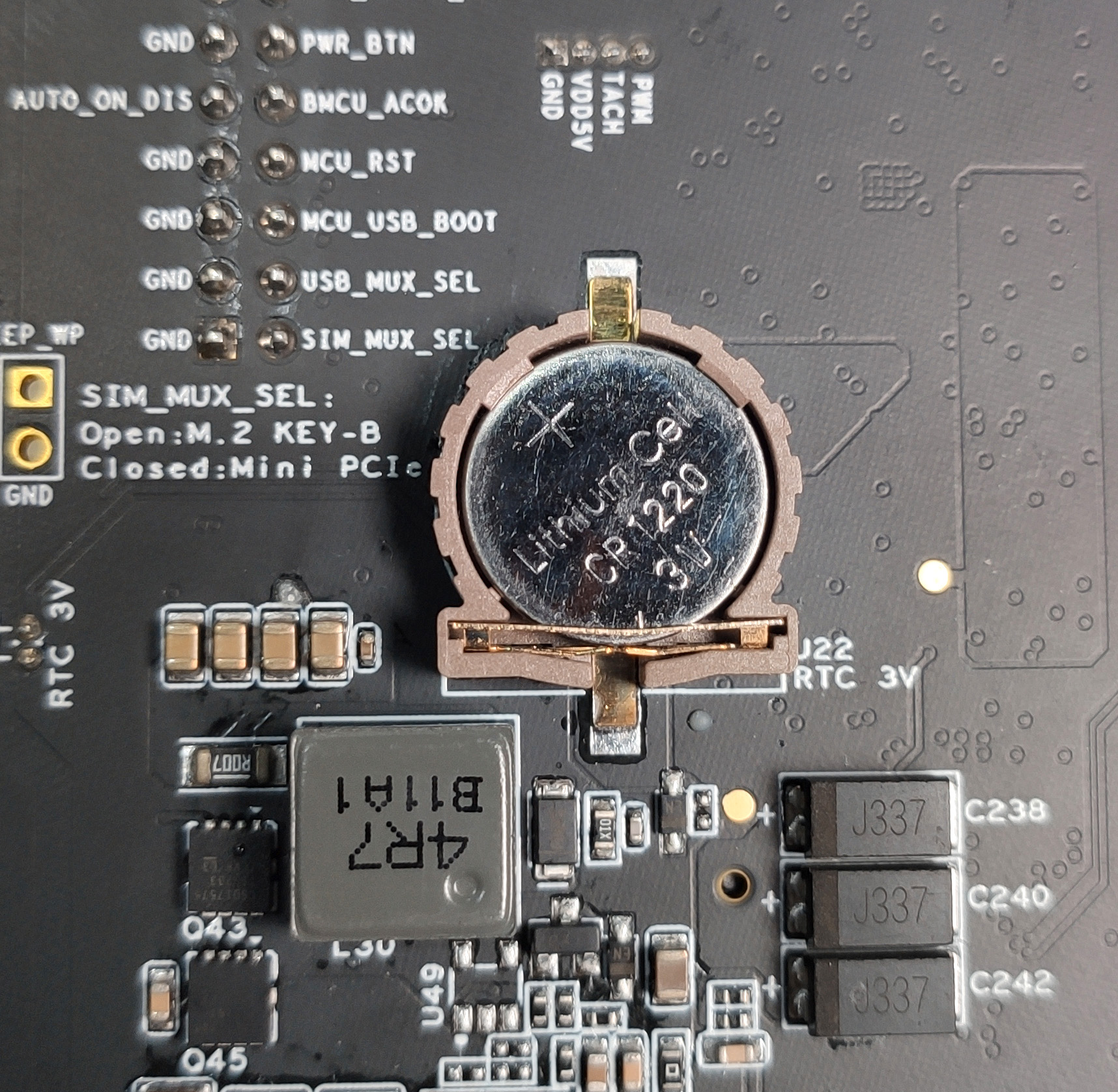
- Method 1:
Connect a 3V CR1220 coin cell battery to the RTC socket on the board as shown below. Make sure the positive (+) end of the battery is facing upwards
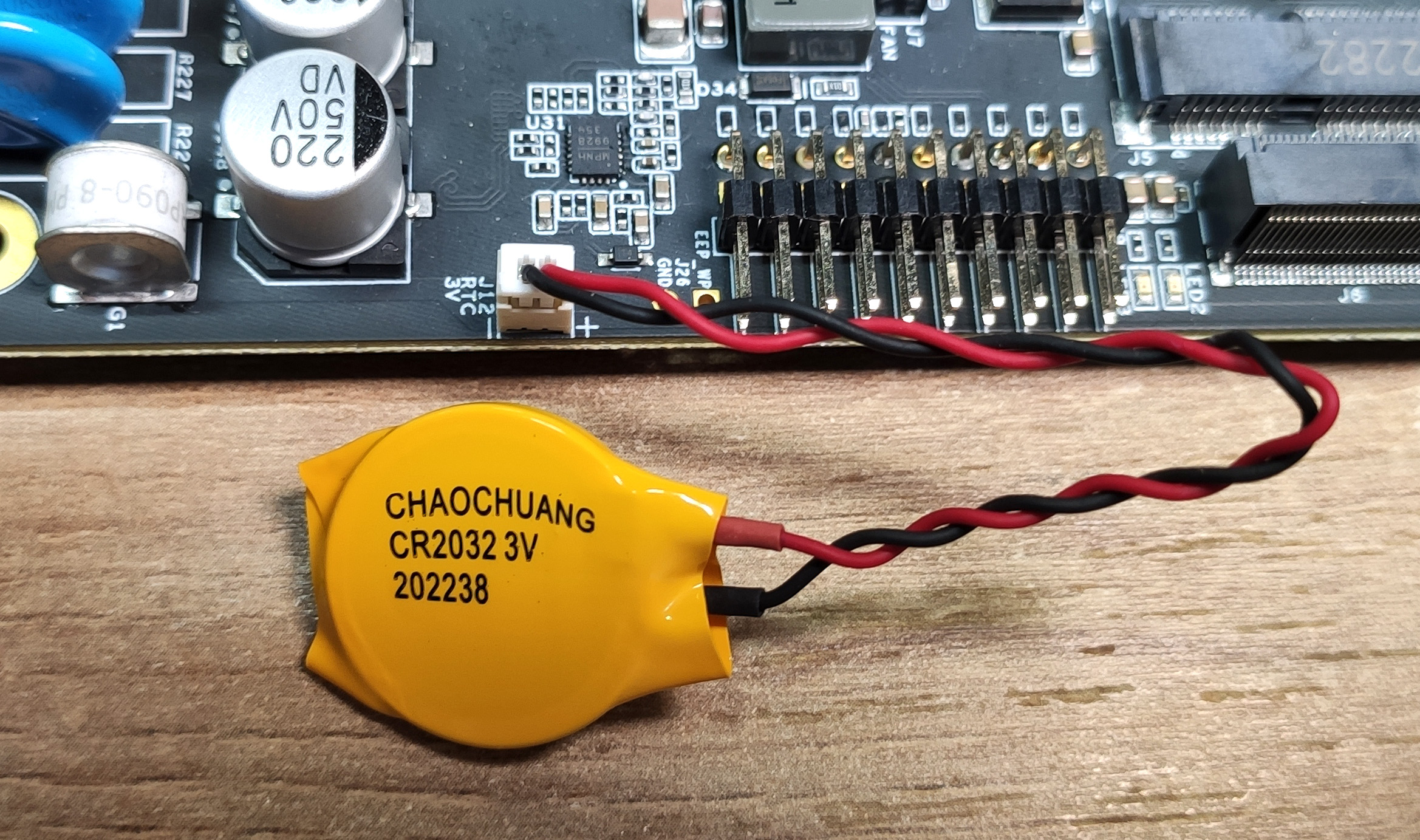
- Method 2:
Connect a 3V CR2302 coin cell battery with JST connector to the 2-pin 1.25mm JST socket on the board as shown below
Usage
Please note that if your reComputer device has already been updated to JetPack 6 or later, the RTC will function normally without any additional configuration. If you are using JetPack 5, you will need to refer to the following content to configure the clock synchronization service.
Step 1: Connect an RTC battery as mentioned above
Step 2: Turn on reComputer Industrial
Step 3: On the Ubuntu Desktop, click the drop-down menu at the top right corner, navigate to Settings > Date & Time, connect to a network via an Ethernet cable and select Automatic Date & Time to obtain the date/ time automatically

If you have not connected to internet via Ethernet, you can manually set the date/ time here
Step 4: Open a terminal window, and execute the below command to check the hardware clock time
sudo hwclock
You will see the output something like below which is not the correct date/ time

Step 5: Change the hardware clock time to the current system clock time by entering the below command
sudo hwclock --systohc
Step 6: Remove any Ethernet cables connected to make sure it will not grab the time from the internet and reboot the board
sudo reboot
Step 7: Check hardware clock time to verify that the date/ time stays the same eventhough the device was powered off
Now we will create a script to always sync the system clock from the hardware clock in each boot.
Step 8: Create a new shell script using any text editor of your preference. Here we use vi text editor
sudo vi /usr/bin/hwtosys.sh
Step 9: Enter insert mode by pressing i, copy and paste the following content inside the file
#!/bin/bash
sudo hwclock --hctosys
Step 10: Make the script executable
sudo chmod +x /usr/bin/hwtosys.sh
Step 11: Create a systemd file
sudo nano /lib/systemd/system/hwtosys.service
Step 12: Add the following inside the file
[Unit]
Description=Change system clock from hardware clock
[Service]
ExecStart=/usr/bin/hwtosys.sh
[Install]
WantedBy=multi-user.target
Step 13: Reload systemctl daemon
sudo systemctl daemon-reload
Step 14: Enable the newly created service to start on boot and start the service
sudo systemctl enable hwtosys.service
sudo systemctl start hwtosys.service
Step 15: Verify the script is up and running as a systemd service
sudo systemctl status hwtosys.service
Step 16: Reboot the board and you will the system clock is now in sync with the hardware clock
M.2 Key M
Out of the box, reComputer Industrial includes a 128GB SSD connected to the M.2 Key M slot, which is pre-installed with JetPack system.
Connection Overview
If you want to remove the included SSD and install a new one, you can follow the steps below. Here we only recommend to use Seeed SSDs with 128GB, 256GB and 512GB storage because we have only tested those SSDs. Further this interface supports PCIe Gen4.0 SSDs.
- Step 1: Remove the pre-installed SSD screw

- Step 2: Remove the SSD by sliding away from the SSD connector

- Step 3: Insert a new SSD and tighten back the screw
Usage
We will explain how to do a simple benchmark on the connected SSD
- Step 1: Check the write speed by executing the below command
sudo dd if=/dev/zero of=/home/nvidia/test bs=1M count=512 conv=fdatasync
- Step 2: Check the read speed by executing the below commands. Make sure to execute this after executing the above command for write speed.
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sudo dd if=/home/nvidia/test of=/dev/null bs=1M count=512
mini PCIe
reComputer Industrial comes with a mini PCIe connector that supports 4G and LoRa modules. However, you can only connect either a 4G module or a LoRa module at once.
4G Module Connection Overview
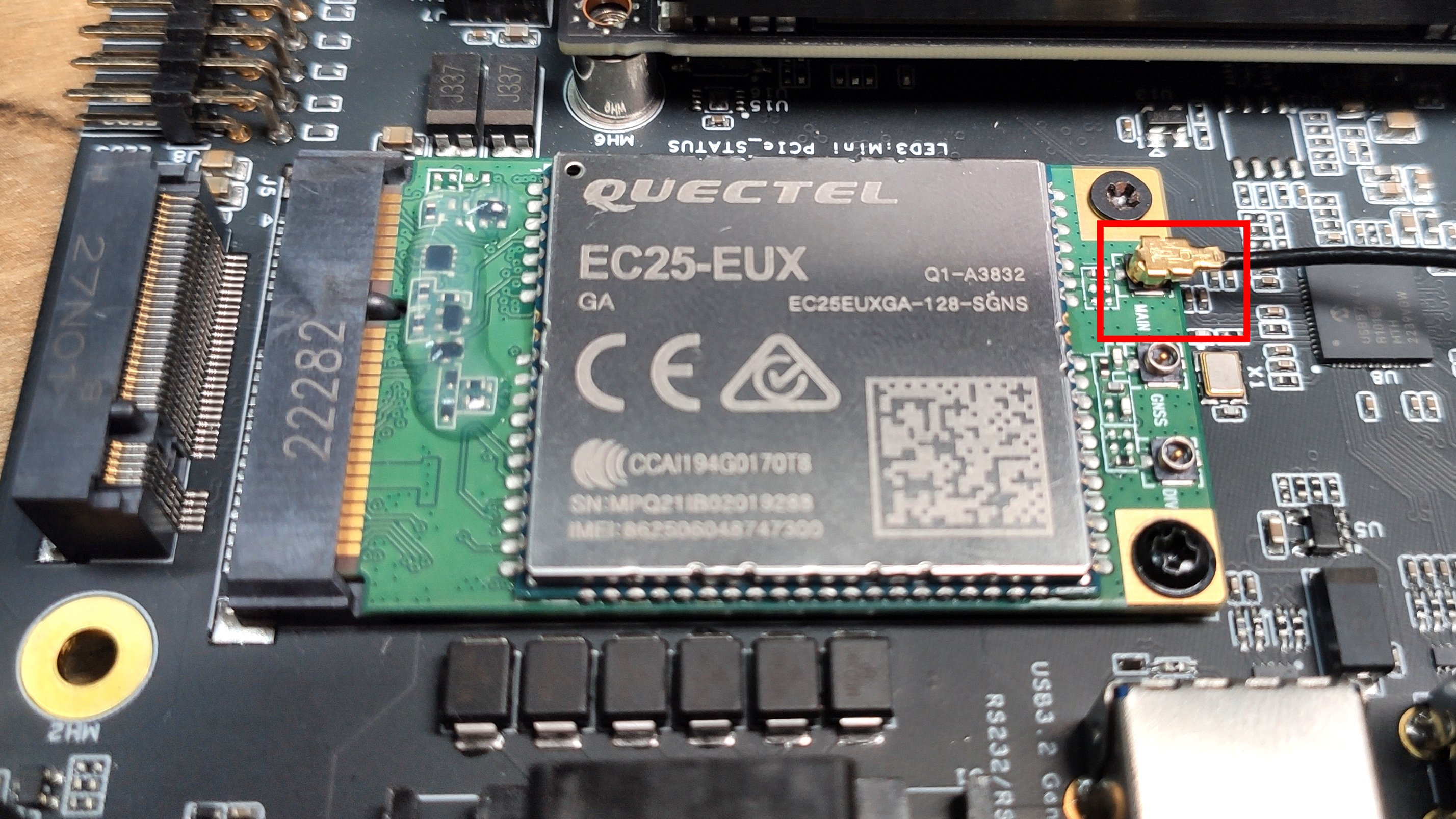
Currently this board supports EC25EUXGA and EC20CEHCLG modules.
-
Step 1: Power off the board if it is already on
-
Step 2: Remove the included standoff. This standoff is only needed if you are using the M.2 Key B interface
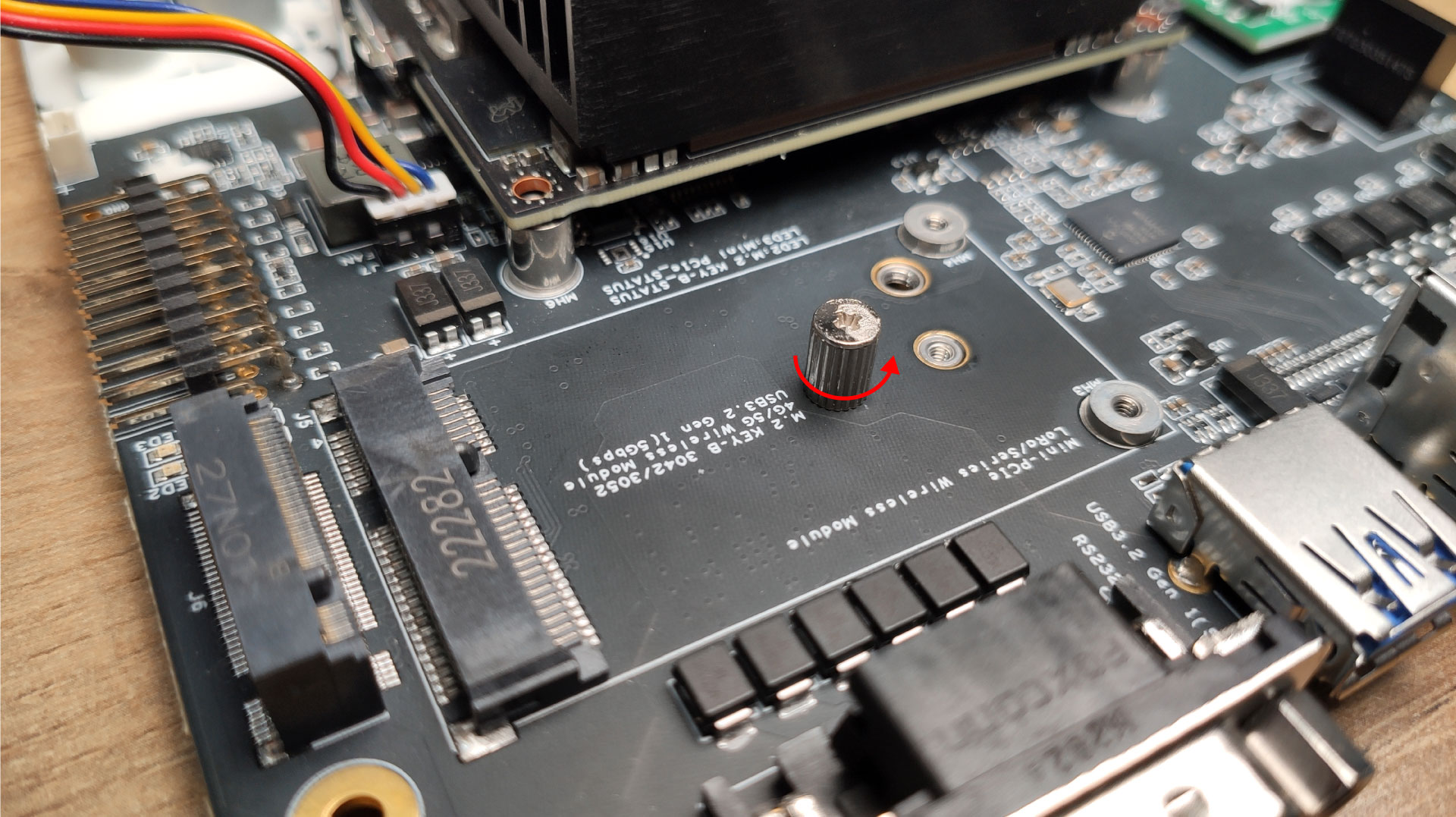
- Step 3: Slide in the 4G module to the mini PCIe slot, use the pre-installed screws and screw them to the 2 holes to secure the 4G module in place

- Step 4: Connect an antenna to the the antenna connector labelled as MAIN. Here you need to use an IPEX connector
- Step 5: Insert a 4G-enabled nano SIM card to the SIM card slot on the board making sure the gold surface of the SIM card is facing down. Here insert the card all the way in so that it will bounce back after hitting the internal spring and lock in place.
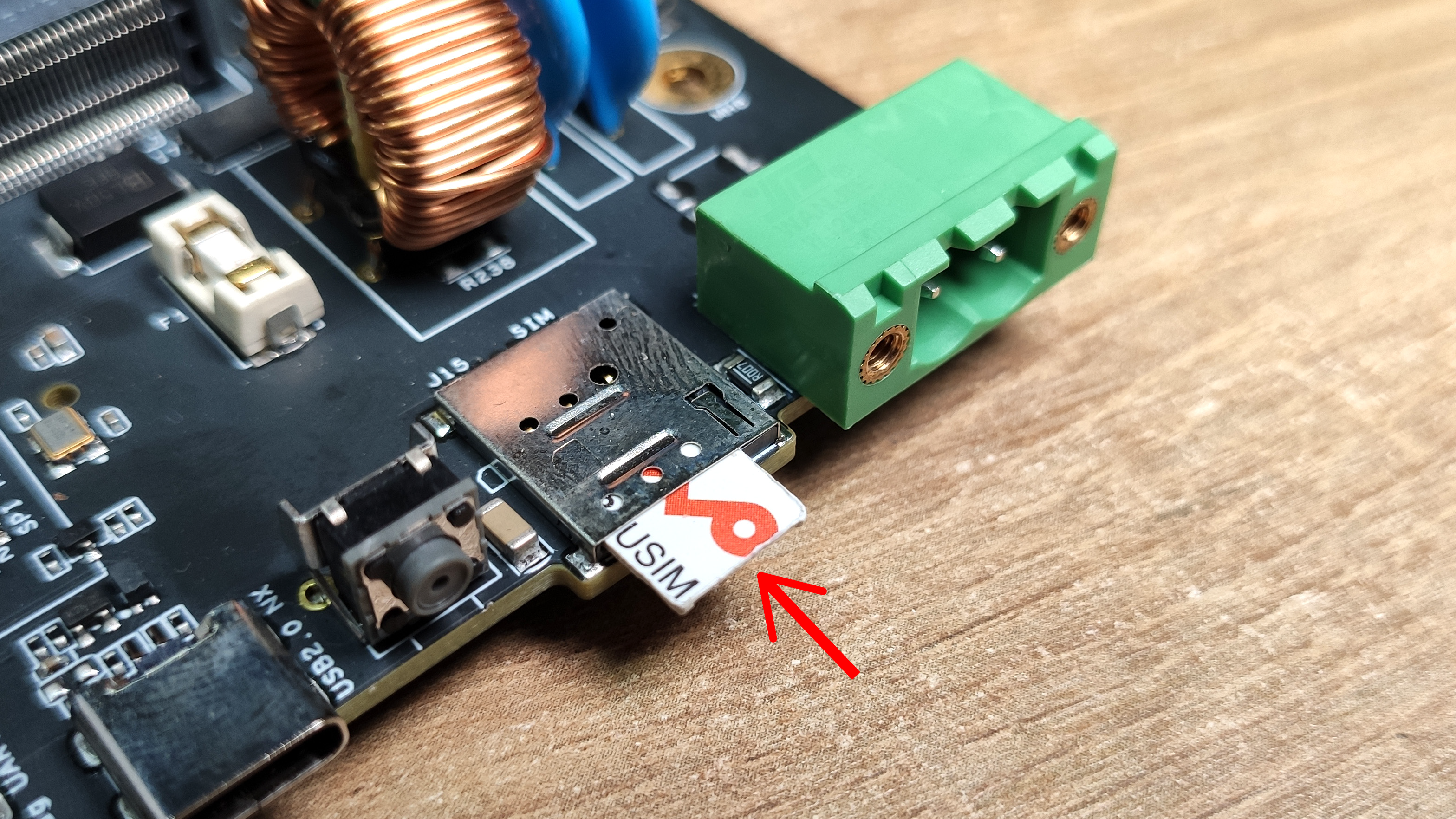
If you want to remove the SIM card, push the card in to hit the internal spring so that the SIM will come out of the slot
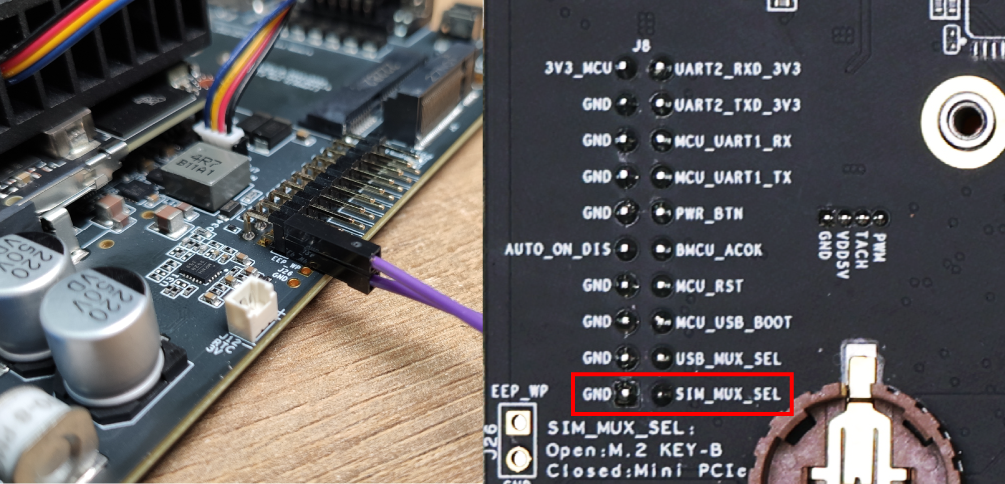
- Step 6: Add a jumper between SIM_MUX_SEL and GND pins on the J8 (Control and UART) Header
- Step 6: Power on the board
4G Module Usage - Test Dialing
When using the EC25 module, the module will automatically start and will be ready to use. However, when using the EC20 module, you need to reset the module for it to work
Step 1: If you are using EC25 module, you can skip this step. However if you are using EC20 module, enter the following commands to access GPIO309 pin which is responsible to reset the 4G module.
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 309 > export
cd gpio309
echo out > direction
echo 1 > value
sudo gpioset --mode=wait gpiochip2 9=1
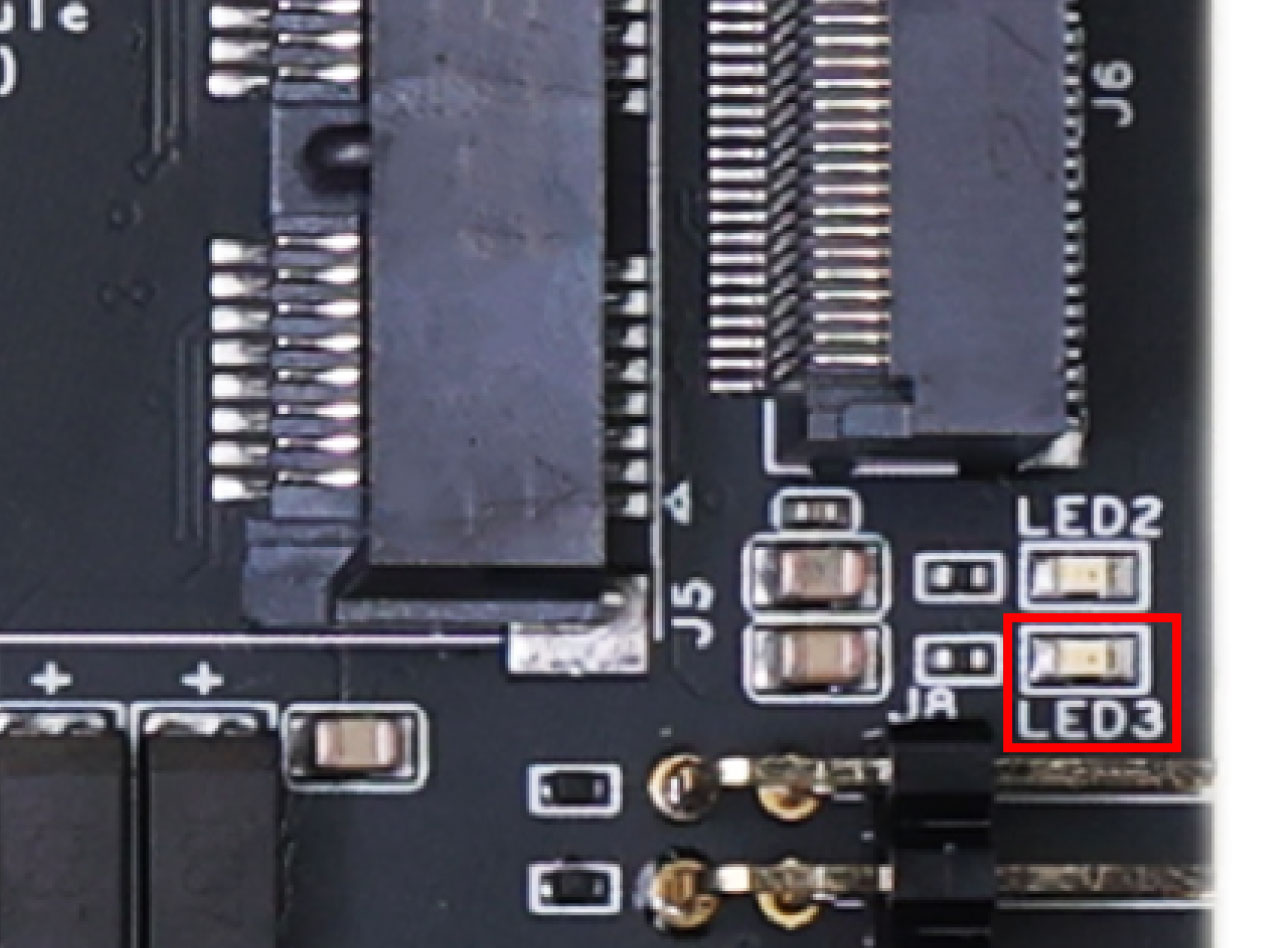
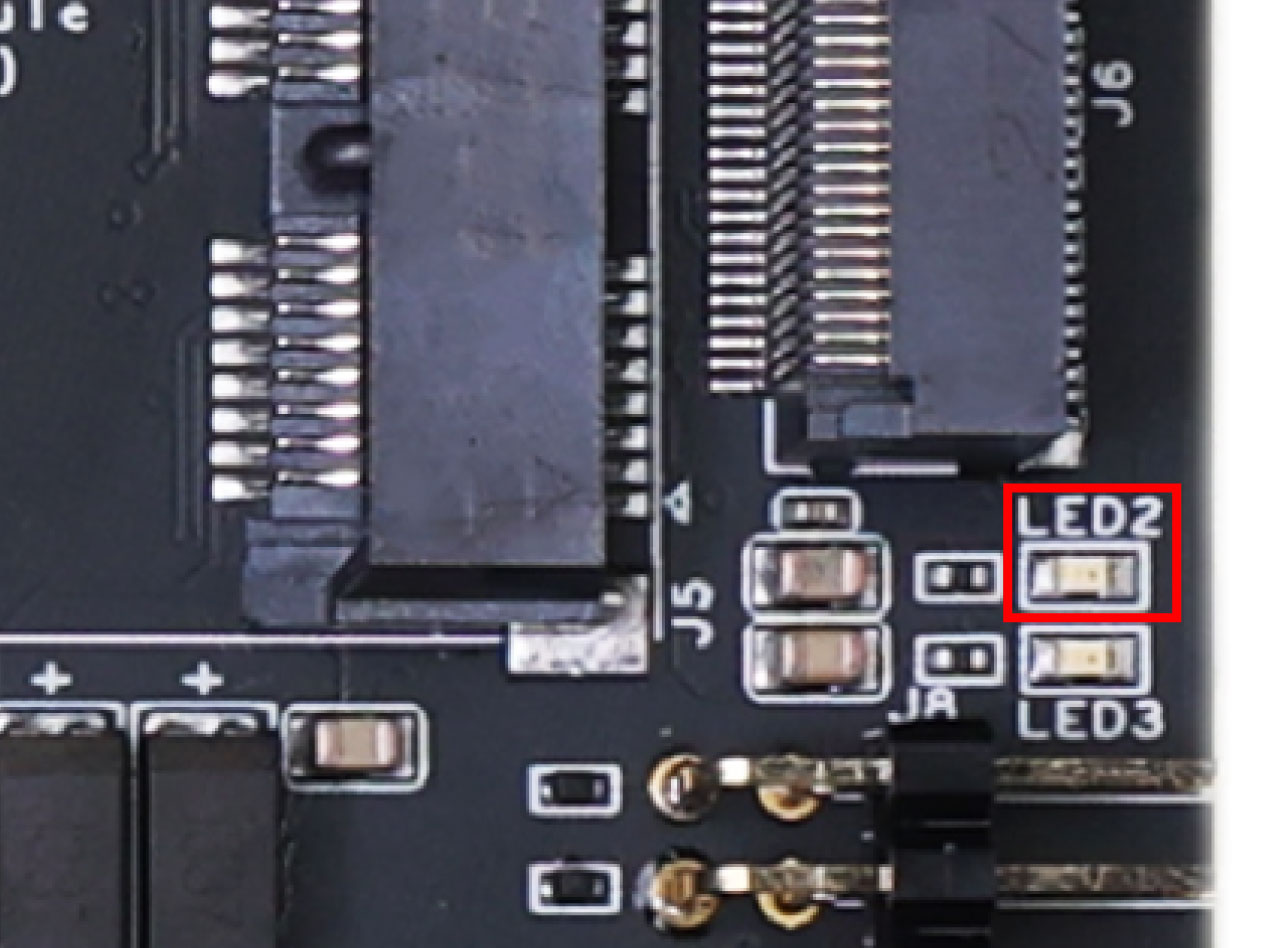
For EC25 module, LED2 will light up in green as soon as the board is booted up. For EC20 module, LED2 will light up in green after resetting the module as explained above
Step 2: Install minicom
sudo apt update
sudo apt install minicom -y
Step 3: Enter the serial console of the connected 4G module so that we can enter AT commands and interact with the 4G module
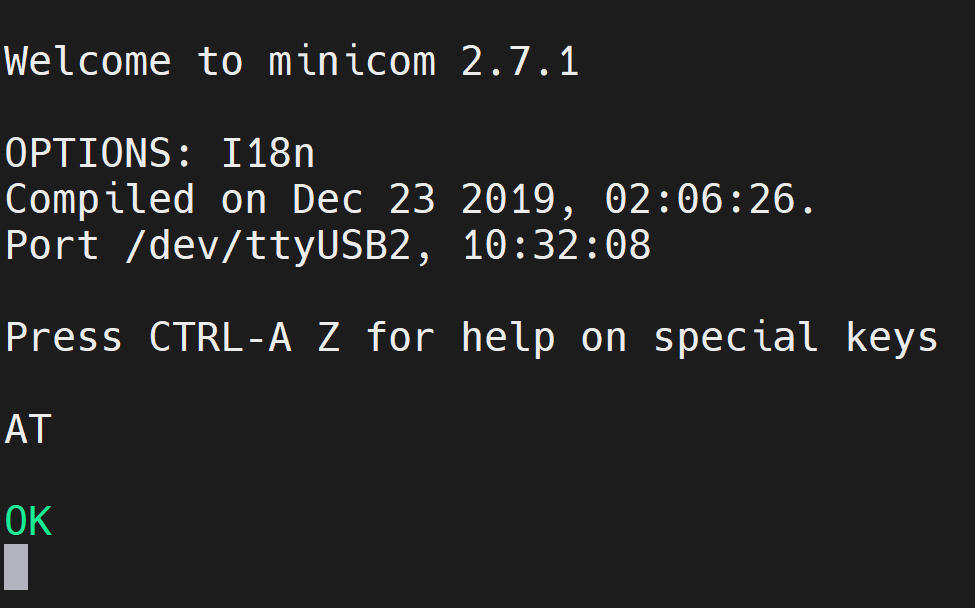
sudo minicom -D /dev/ttyUSB2 -b 115200
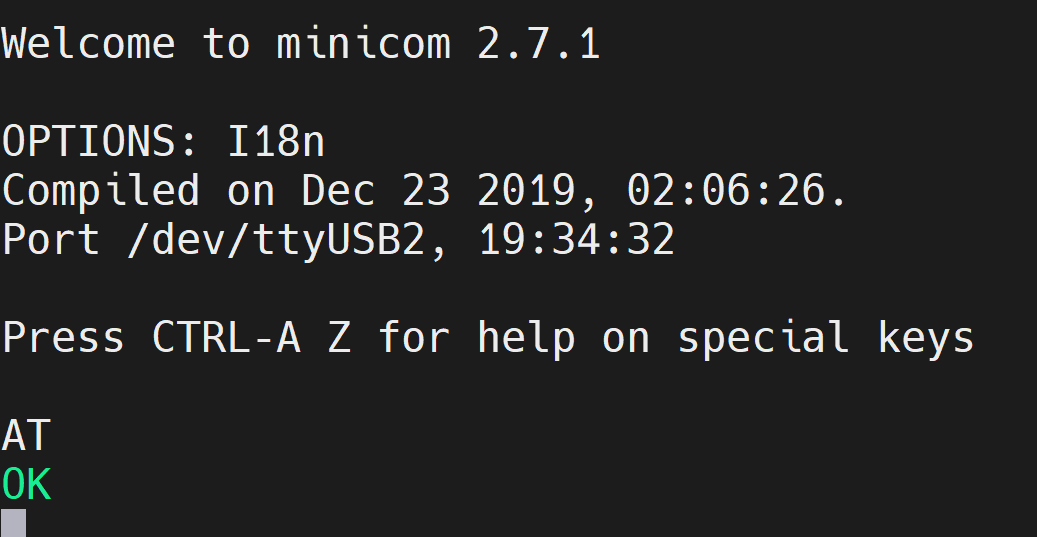
Step 4: Press Ctrl+A and then press E to turn on local echo
Step 5: Enter the command "AT" and press enter. If you see the response as "OK", the 4G module is working properly
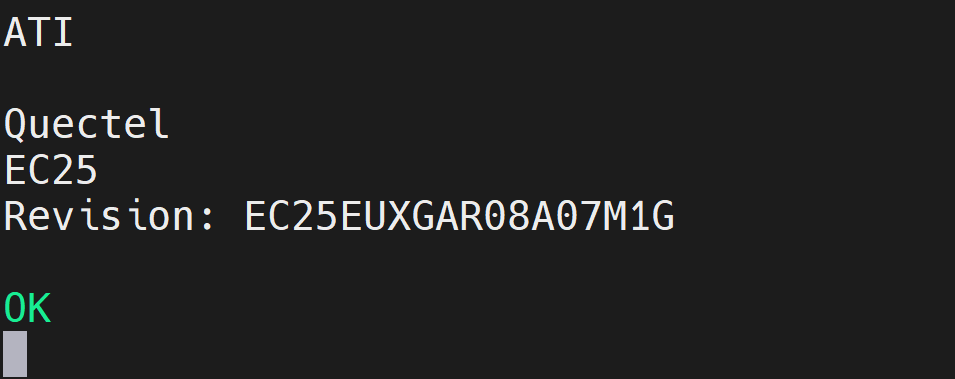
Step 6: Enter the command "ATI" to check the module information
Step 7: To test the module, enter the below command to call another phone number
ATD<phone_number>;
And you will see the below output
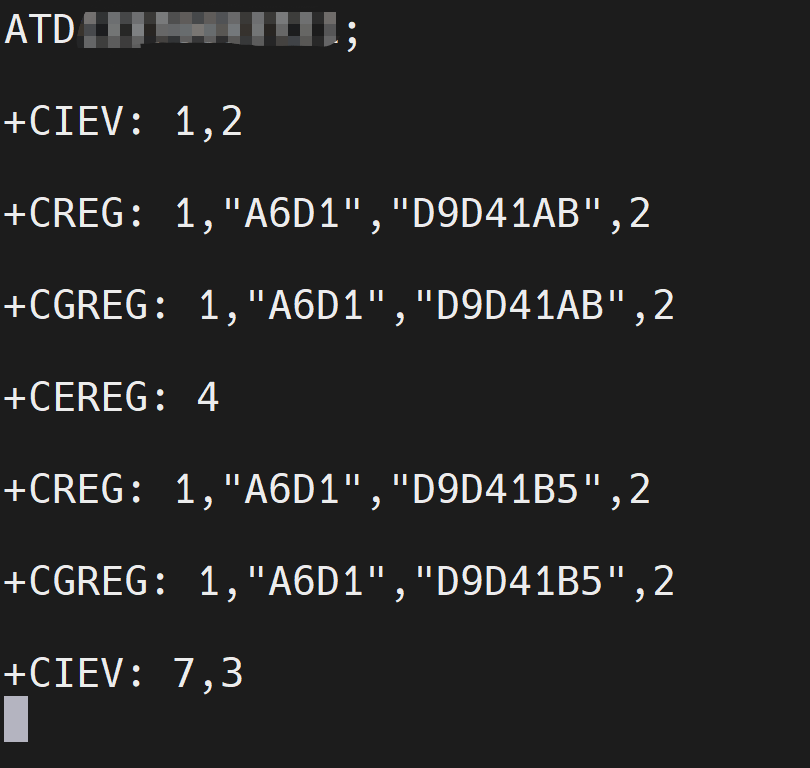
If the entered phone number can receive the call, the module is working as expected
4G Module Usage - Connect to Internet
EC25 module
If you are using the EC25 module, follow the below steps
- Step 1: After opening the serial console of the 4G module as explained above (4G Module Usage - Test Dialing section), execute the following command to connect to the internet. Here replace YOUR_APN with the APN of your network provider
AT+CGDCONT=1,"IP","YOUR_APN"
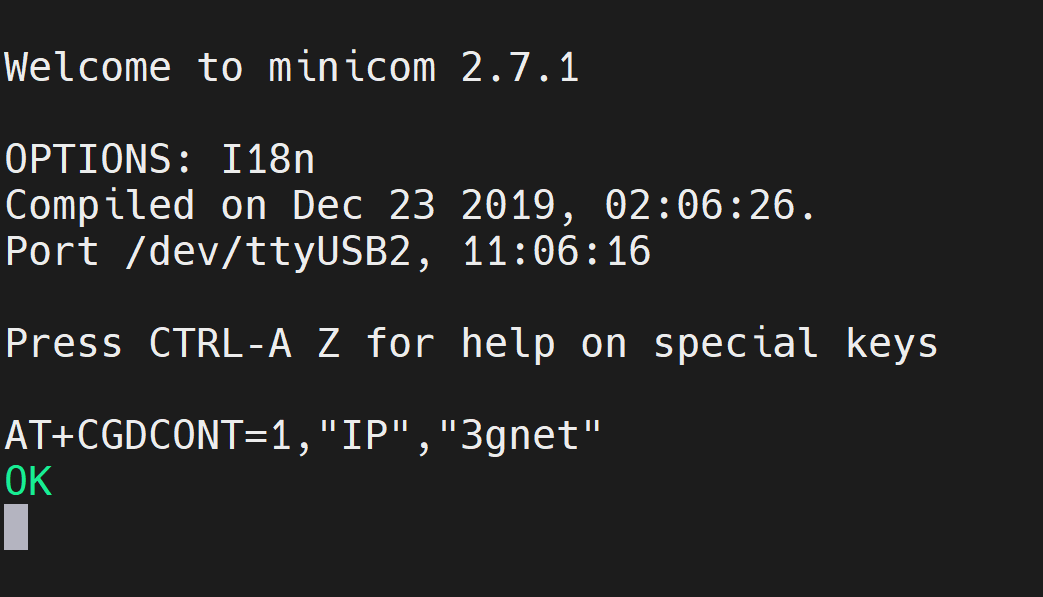
On successful connection, it should output OK as you can see from the image above
- Step 2: Restart the 4G module by executing the following
AT+CFUN=1,1
Now you will lose connection to the 4G module on the serial terminals
-
Step 3: Close minicom by pressing CTRL + A and then Q
-
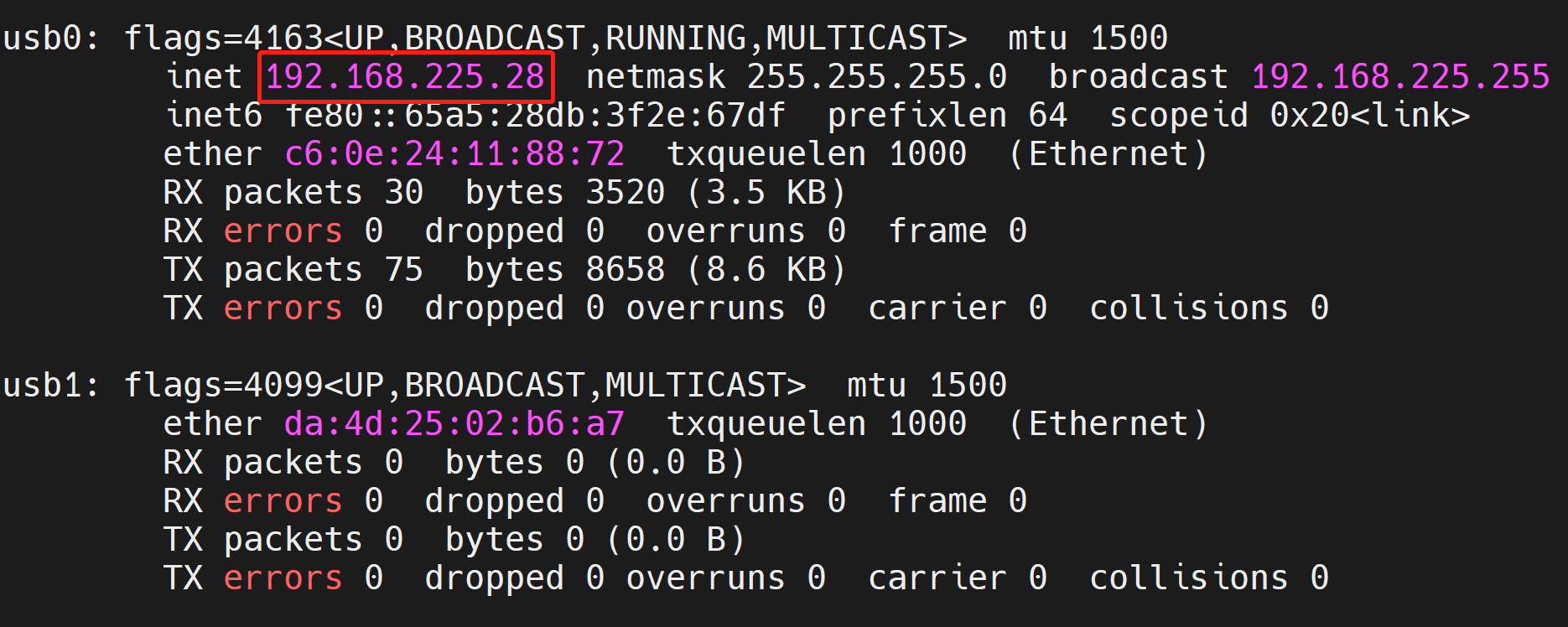
Step 4: Type ifconfig and you will see an IP address on the usb0 interface
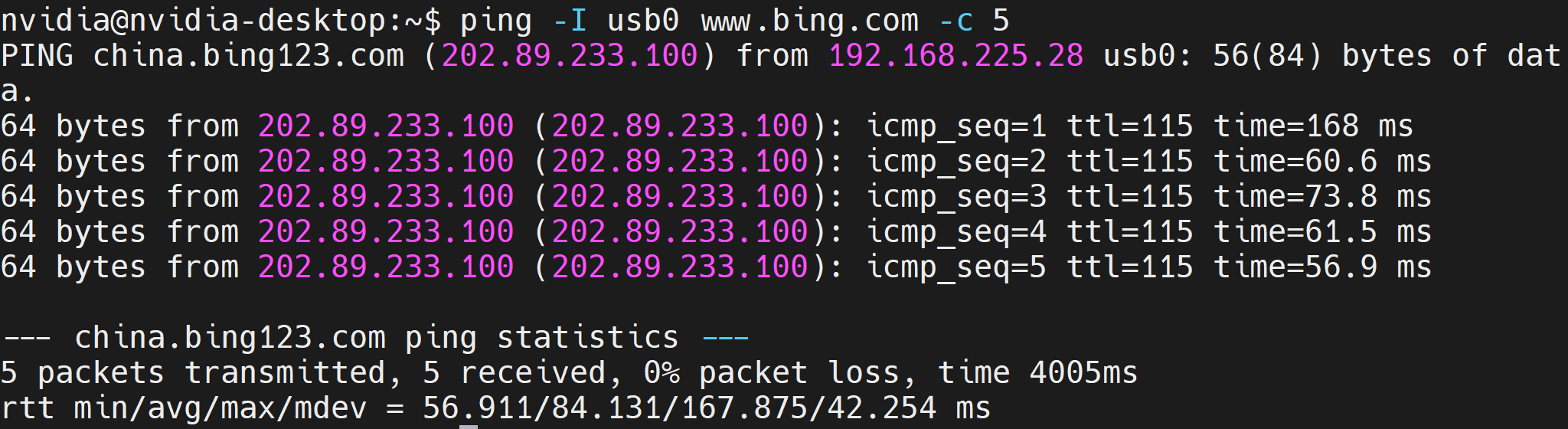
- Step 5: You can try to ping a website as follows to check whether there is internet connectivity
ping -I usb0 www.bing.com -c 5
EC20 module
If you are using the EC20 module, follow the below steps
-
Step 1: If you have already reset the 4G module as explained in the previous section (4G Module Usage - Test Dialing section) for EC20 module, you can skip this step. However, if you have not yet done it, please do it now
-
Step 2: Enter the serial console of the 4G module and enter the following command to set to ECM mode
AT+QCFG="usbnet",1
-
Step 3: Reset the 4G module
-
Step 4: Inside the 4G module console, execute the following command to connect to the internet. Here replace YOUR_APN with the APN of your network provider
AT+CGDCONT=1,"IP","YOUR_APN"
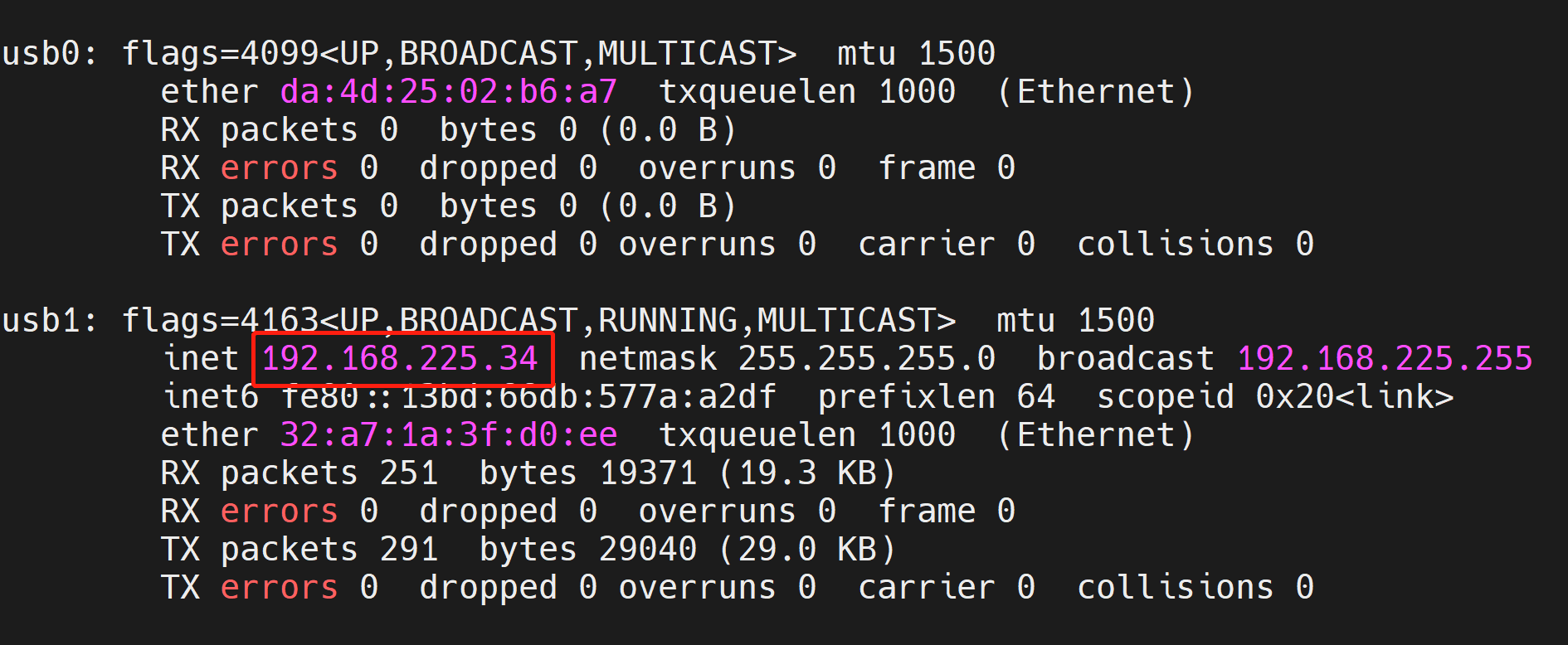
- Step 6: Type ifconfig and you will see an IP address on the usb1 interface
- Step 7: You can try to ping a URL as follows to check whether there is internet connectivity
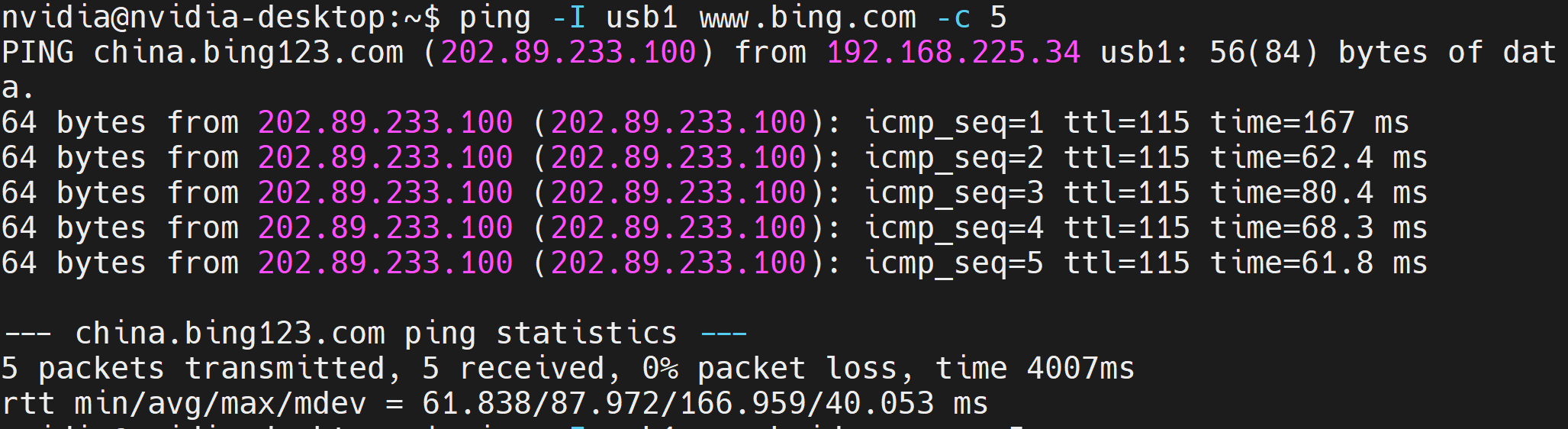
LoRa Module Connection Overview
Currently this board supports WM1302 SPI module. You can either use US version or EU version which is available on our Bazaar.
-
Step 1: Power off the board if is already on
-
Step 2: Slide in the LoRa module to the mini PCIe slot and use the pre-installed screws and screw them to the 2 holes to secure the 4G module in place

- Step 3: Connect an antenna to the the antenna connector. Here you need to use an IPEX connector

Make sure there is no jumper between SIM_MUX_SEL and GND pins on the J8 (Control and UART) Header. This jumper is only needed when using 4G modules
- Step 4: Power on the board
LoRa Module Usage - Testing LoRa RF
When the LoRa module is connected, you will see the green and blue LEDs on the module light up

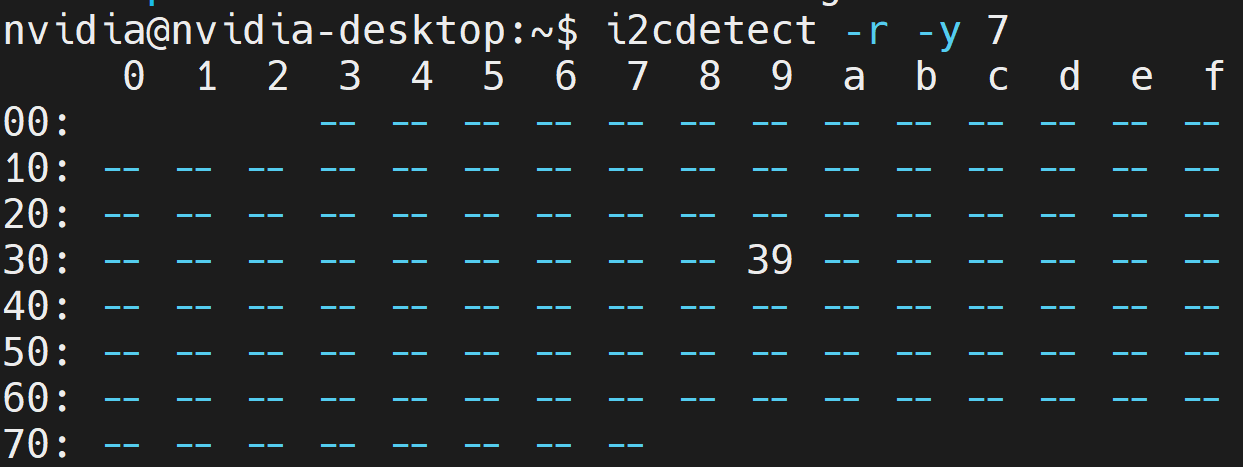
- Step 1: Enter the below command to check whether the LoRa module is detected by the system
i2cdetect -r -y 7
If you see the below output, the module is detected by the system
- Step 2: Enter the below commands to compile and build the LoRa signals transmitting tool
git clone https://github.com/lakshanthad/sx1302_hal
cd sx1302_hal
make
cd libloragw
cp ../tools/reset_lgw.sh .
sudo ./test_loragw_hal_tx -r 1250 -m LORA -f 867.1 -s 12 -b 125 -n 1000 -z 100 --dig 3 --pa 0 --pwid 13 -d /dev/spidev2.0
If you see the below result and the LED on the LoRa module turns RED, that means the module is trasmitting RF signals successfully
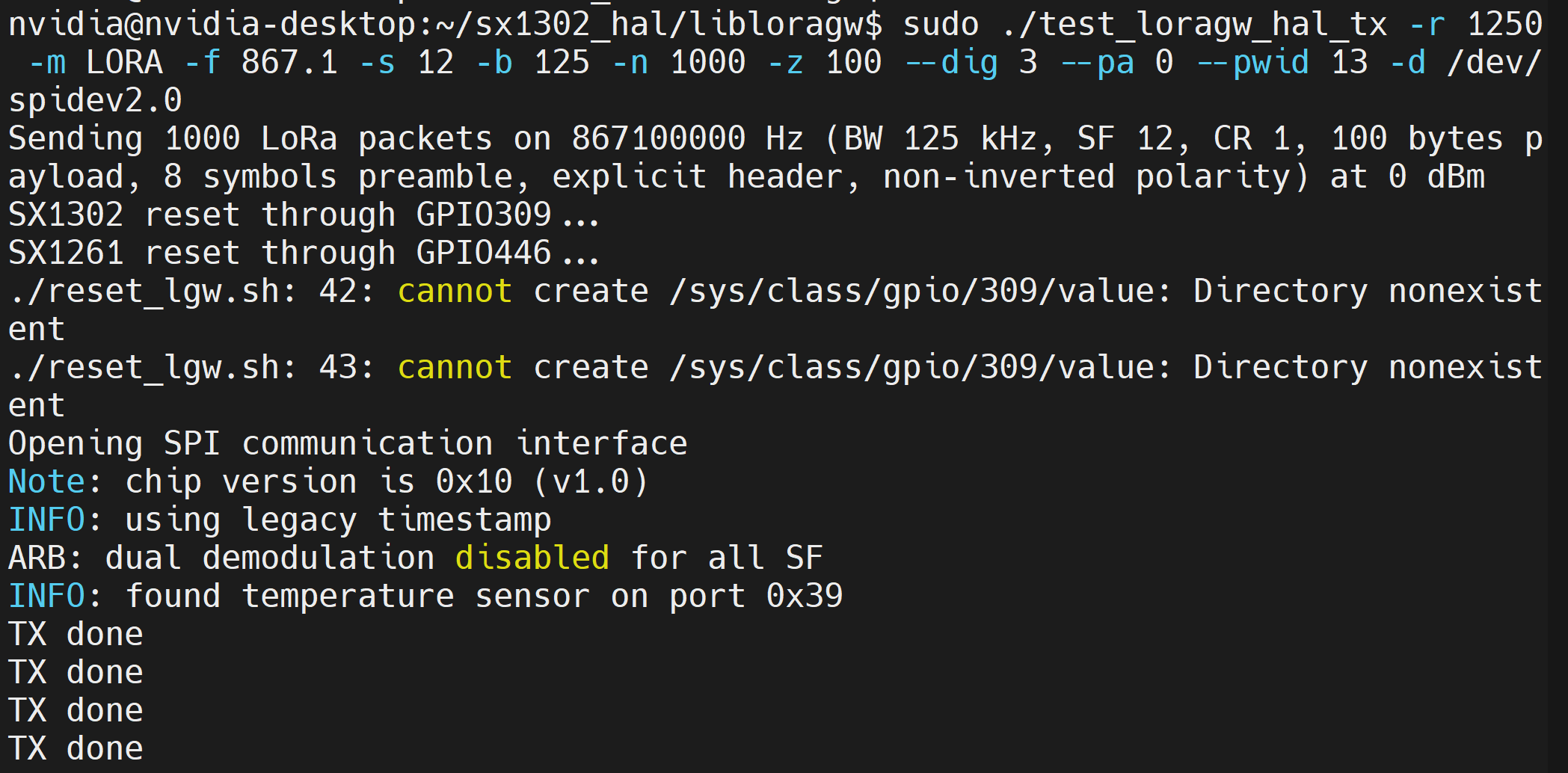

To stop transmitting, you can press CTRL + C on the keyboard.
LoRa Module Usage - Connect to TTN
Now we will connect to TTN (The Things Network) and use the reComputer Industrial as a TTN LoRaWAN gateway
- Step 1: Enter the below to make the packet forwarder ready
cd ..
cd packet_forwarder
cp ../tools/reset_lgw.sh .
- Step 2: Run the following according to the LoRa module you are using. Here we have tested SPI US915 version
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.US915
However, the commands for different other modules are as follows
# USB 915
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.US915.USB
# SPI EU868
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.EU868
# USB EU868
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
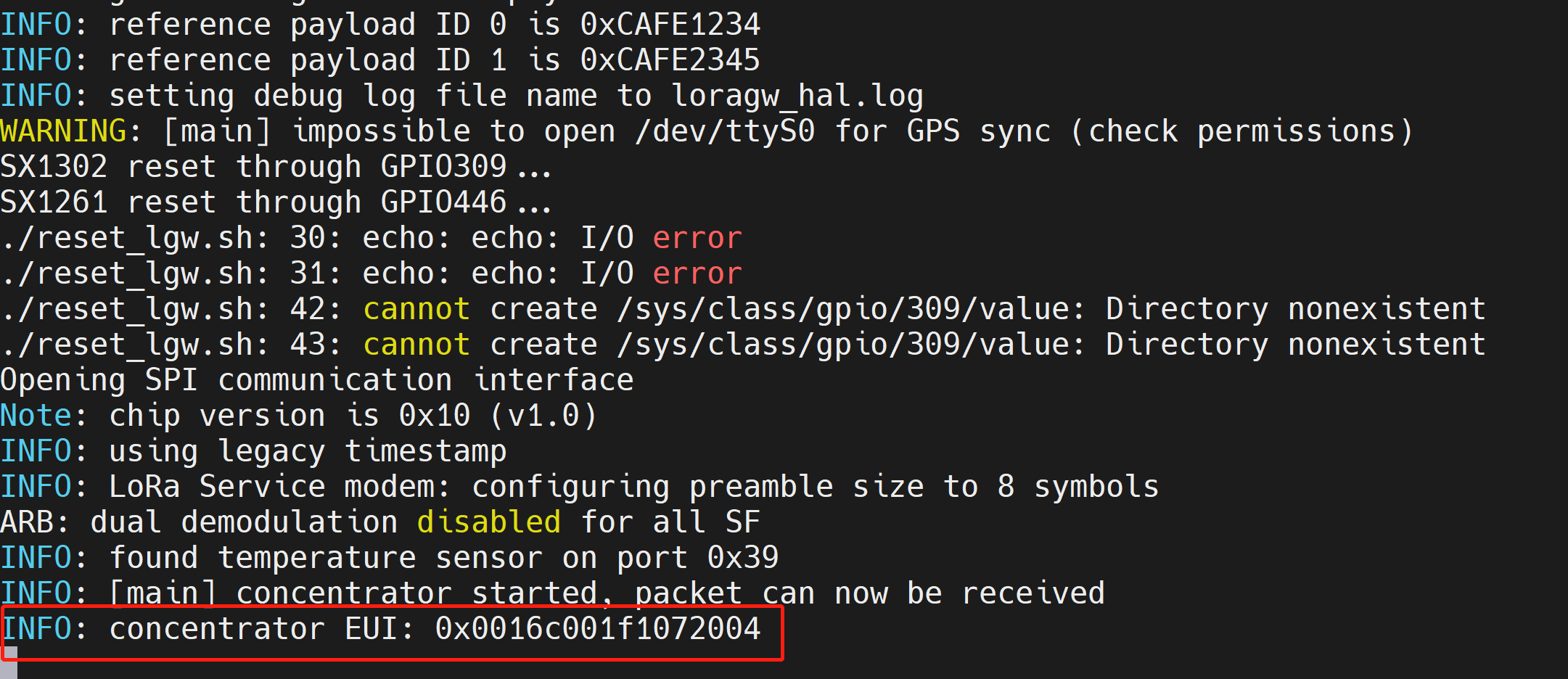
After running the above command, you will see the below output with last line showing the concentrator EUI information. Please keep this information because we will use it later when setting up the gateway with TTN
- Step 3: Visit this URL to enter the TTN console and select a region of your choice
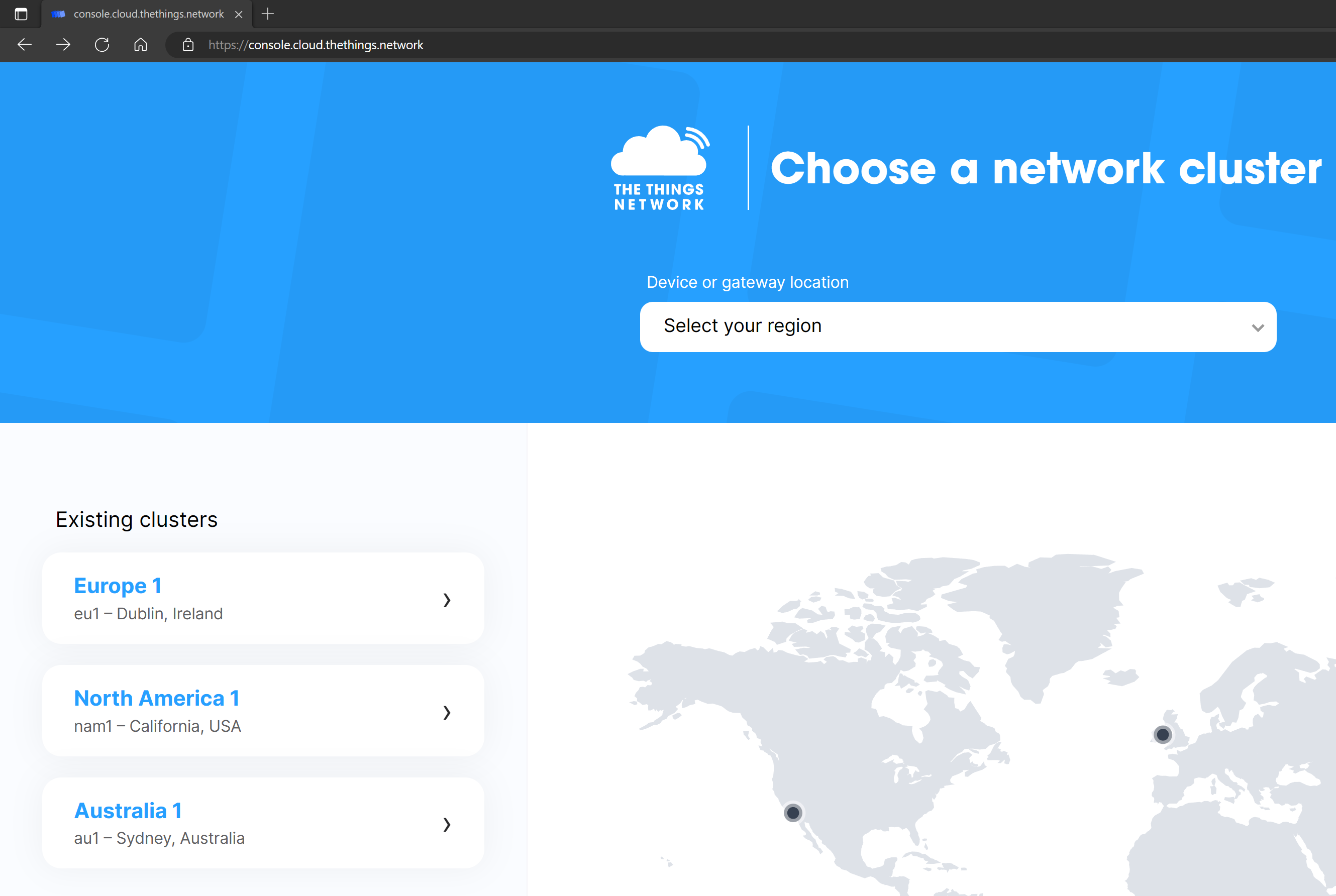
- Step 4: Login if you already have an account, or sign up for a new account if you do not have one
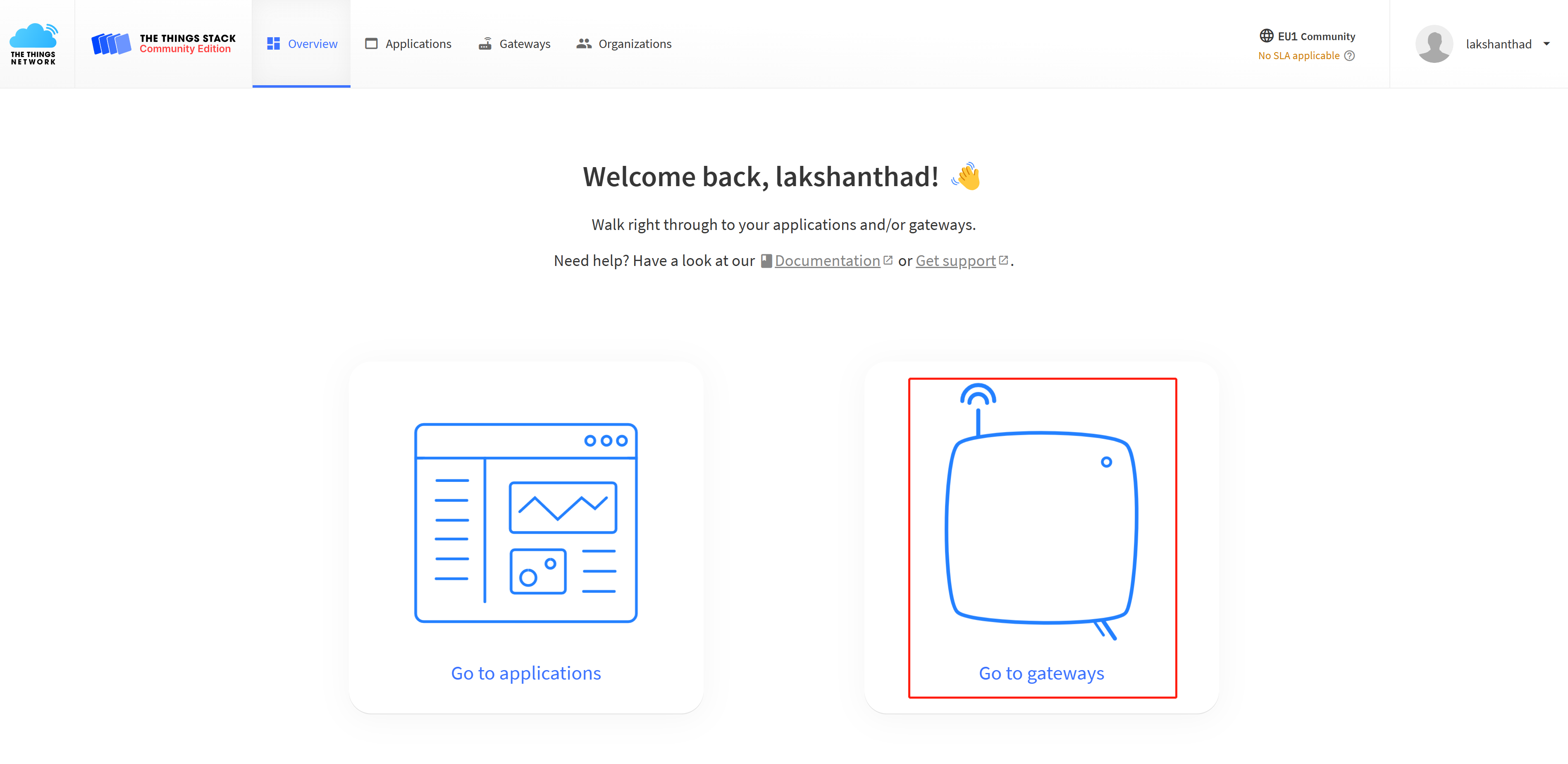
- Step 5: Click Go to gateways
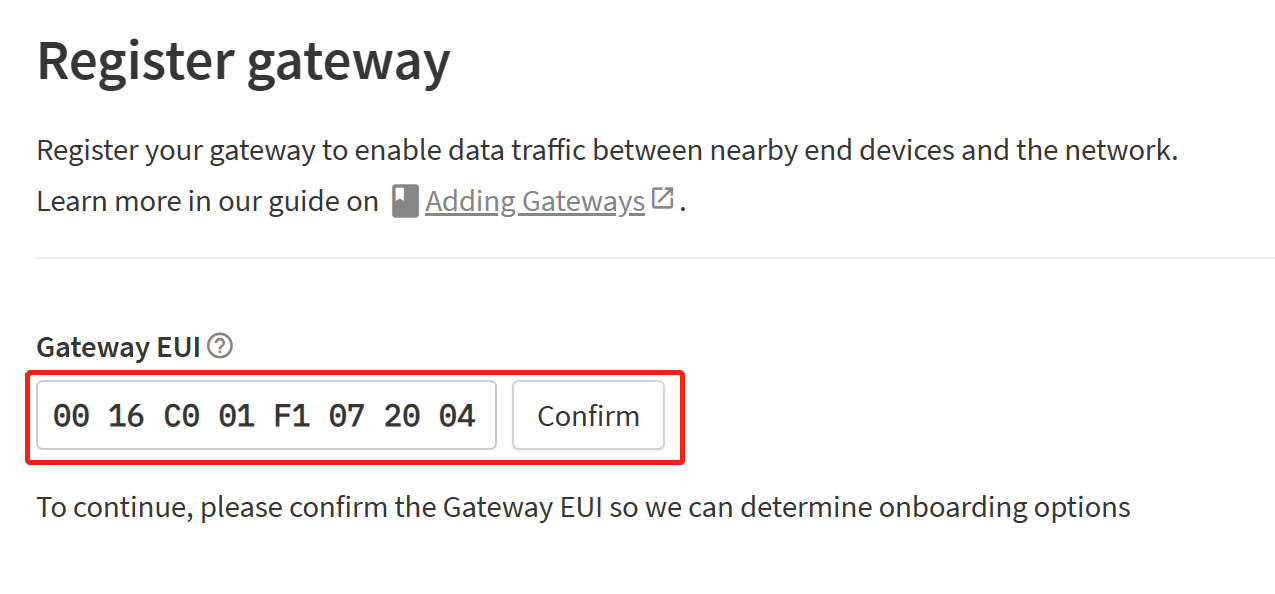
- Step 6: Click + Register gateway

- Step 7: Enter the Concentrator EUI that you obtained before inside the Gateway EUI section and click Confirm
- Step 8: Enter the Frequency plan according to the LoRa module you are using. Here we are using US915 verison of the module and therefore have selected United Stated 902-928 MHz, FSB 2 (used by TTN). After that click Register gateway
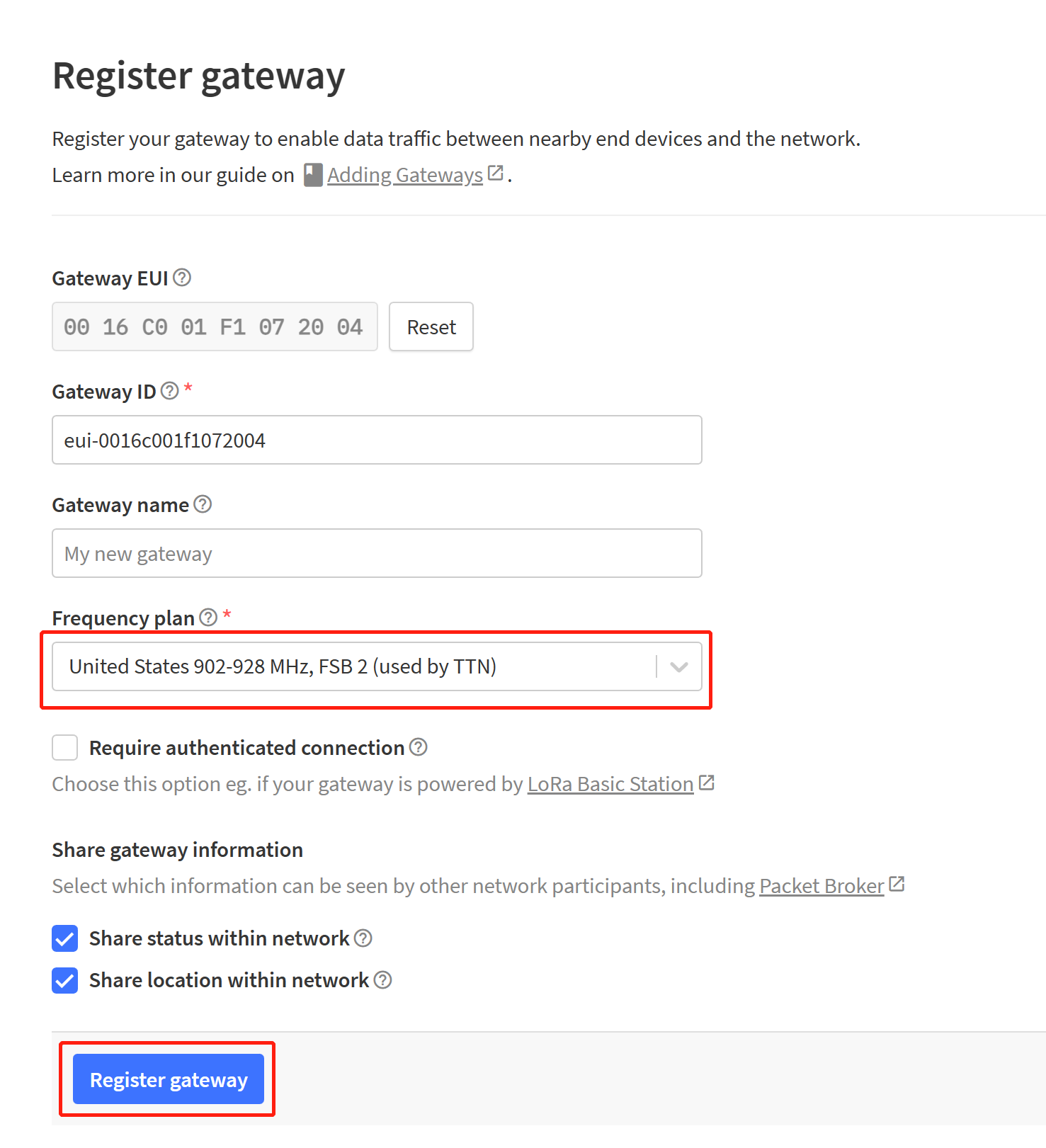
The Gateway ID has been filled automatically for you. However, you can change it to anything you prefer. Gateway name is not a must to fill. However, you can fill it as well according to your preference
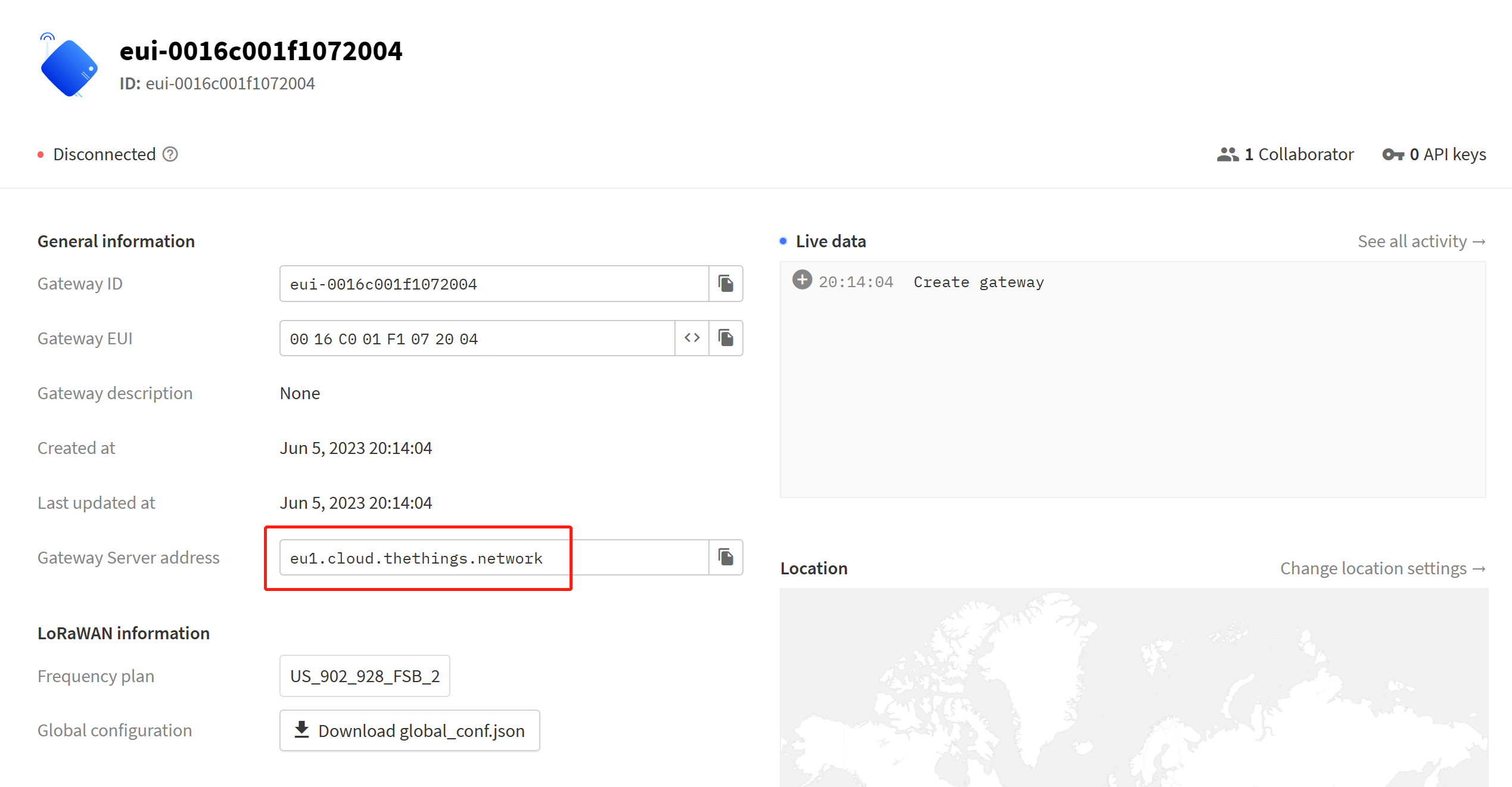
- Step 9: Make note of the Gateway Server Address on the main homepage of the gateway
-
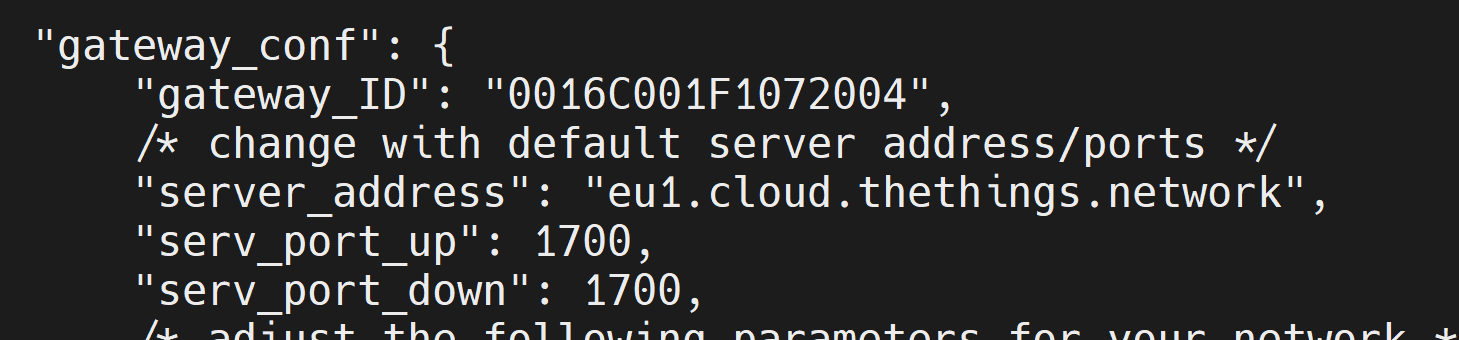
Step 9: On the reTerminal Industrial, edit the global_conf_json file that we used along with the lora_pkt_fwd command. Here you need to change the gateway_ID, server_address, serv_port_up and serv_port_down options as follows
- gateway_ID: Concentrator EUI from device
- server_address: Gateway Server Address from TTN
- serv_port_up: 1700
- serv_port_down: 1700
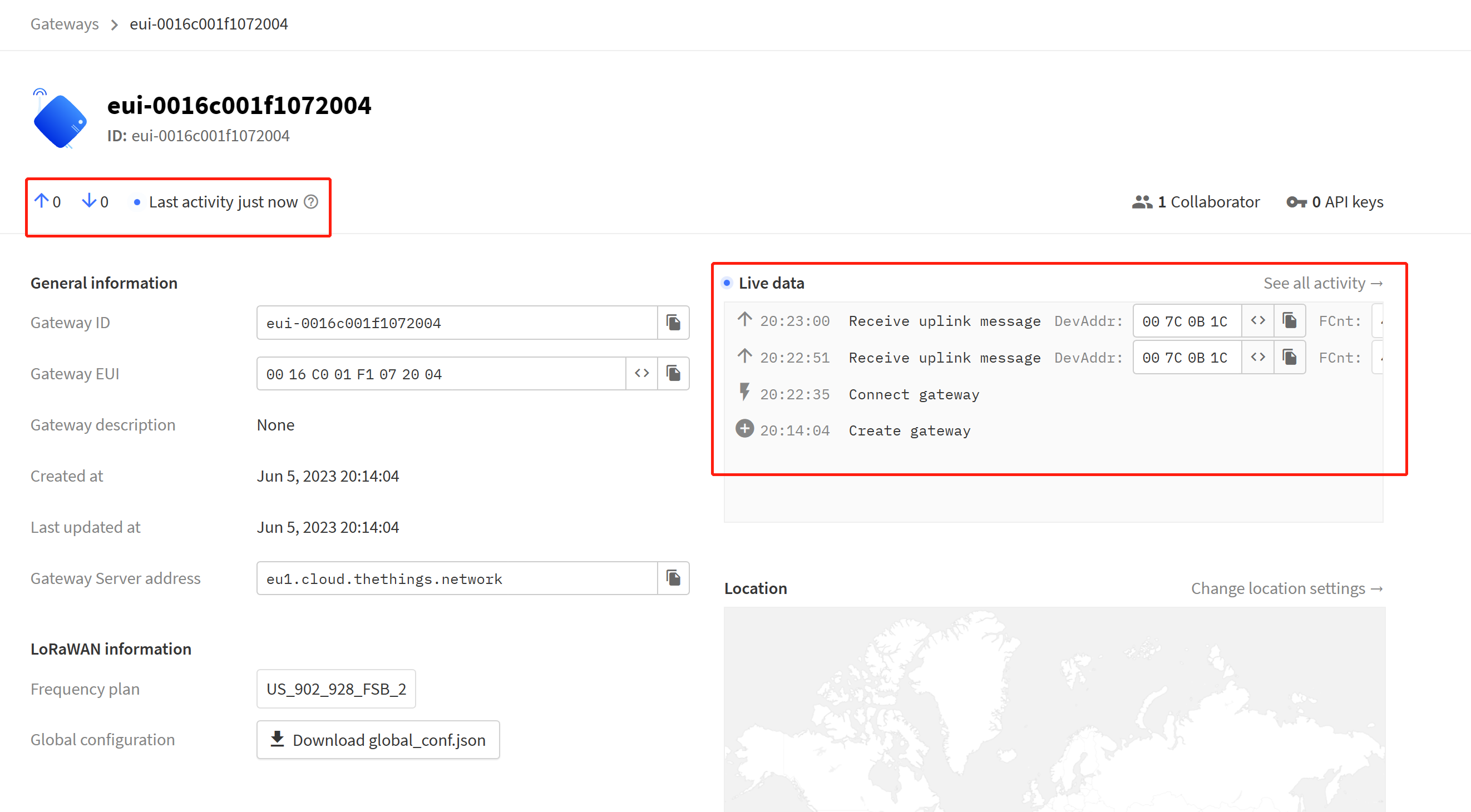
- Step 10: Rerun the packet forwarder
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.US915
If you see the below output, that means the device has successfully connected with TTN
M.2 Key B
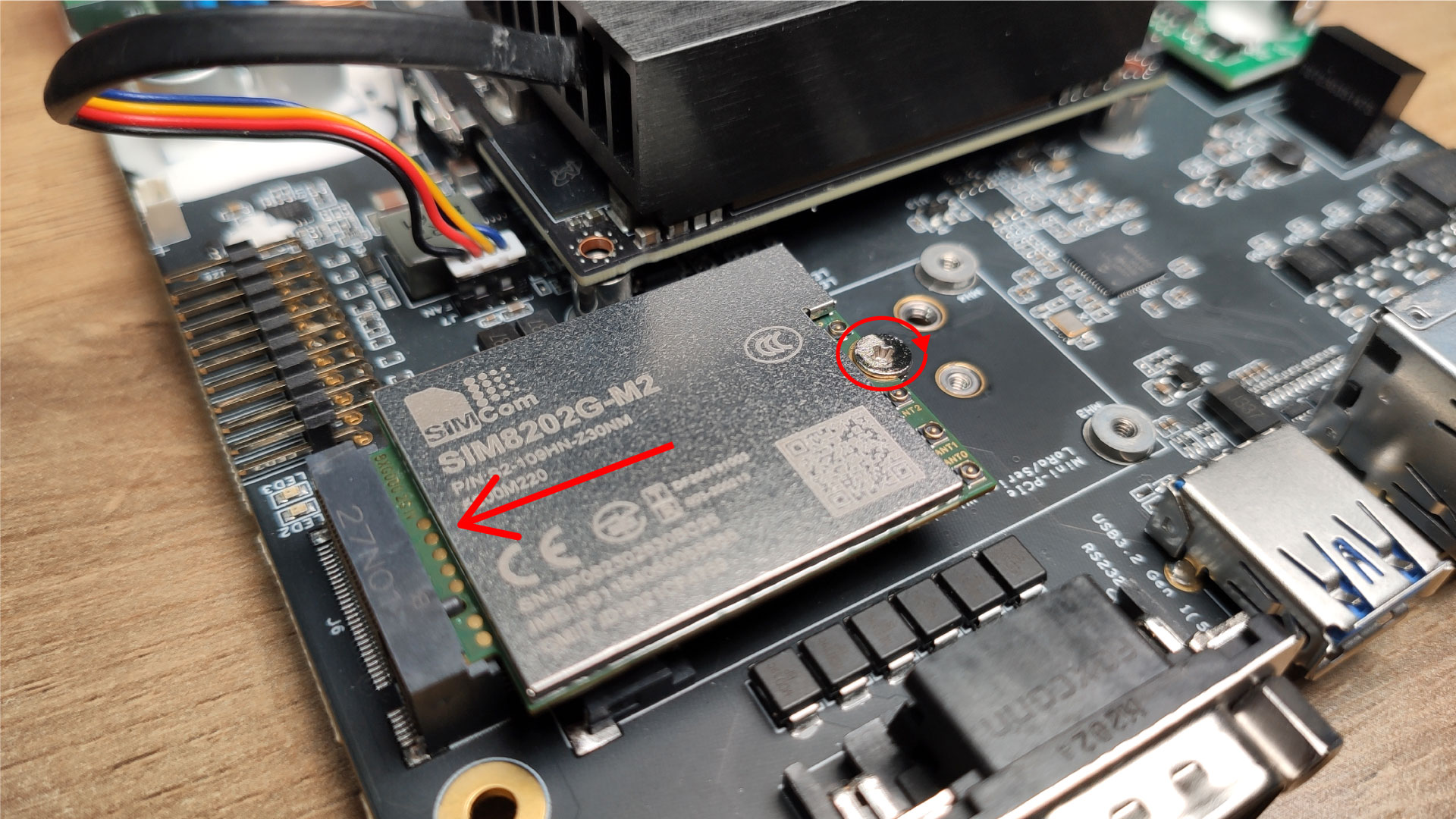
reComputer Industrial comes with a M.2 Key B connector that supports 4G and 5G modules. Currently we have tested SIM8202G-M2 5G module
5G Module Connection Overview
-
Step 1: Power off the board if it is already on
-
Step 2: Make sure the standoff is in place and then remove the top screw on the standoff
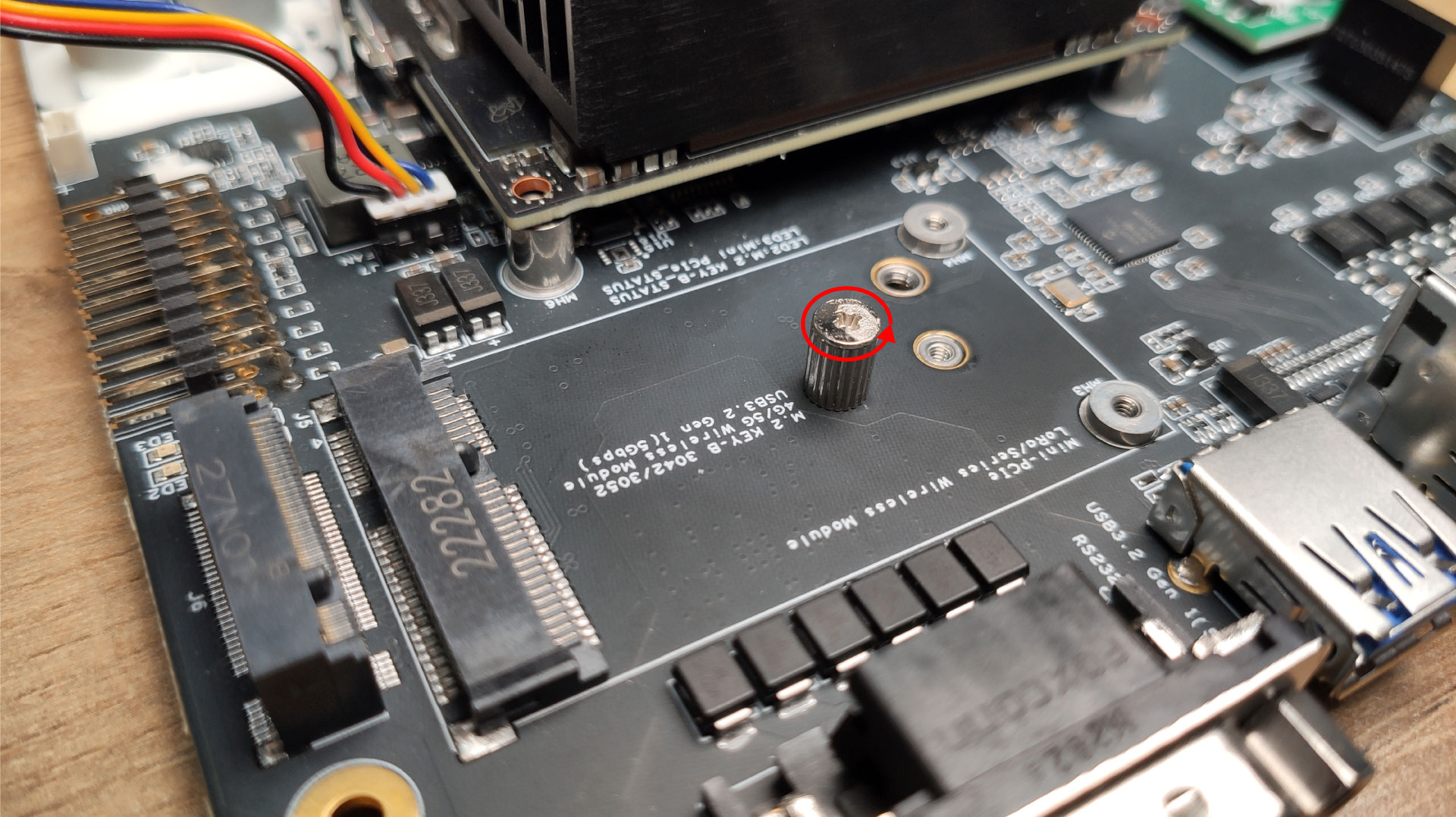
- Step 2: Slide in the 5G module to the M.2 Key B slot and screw in the standoff screw to secure the 5G module in place (talk about standoff)
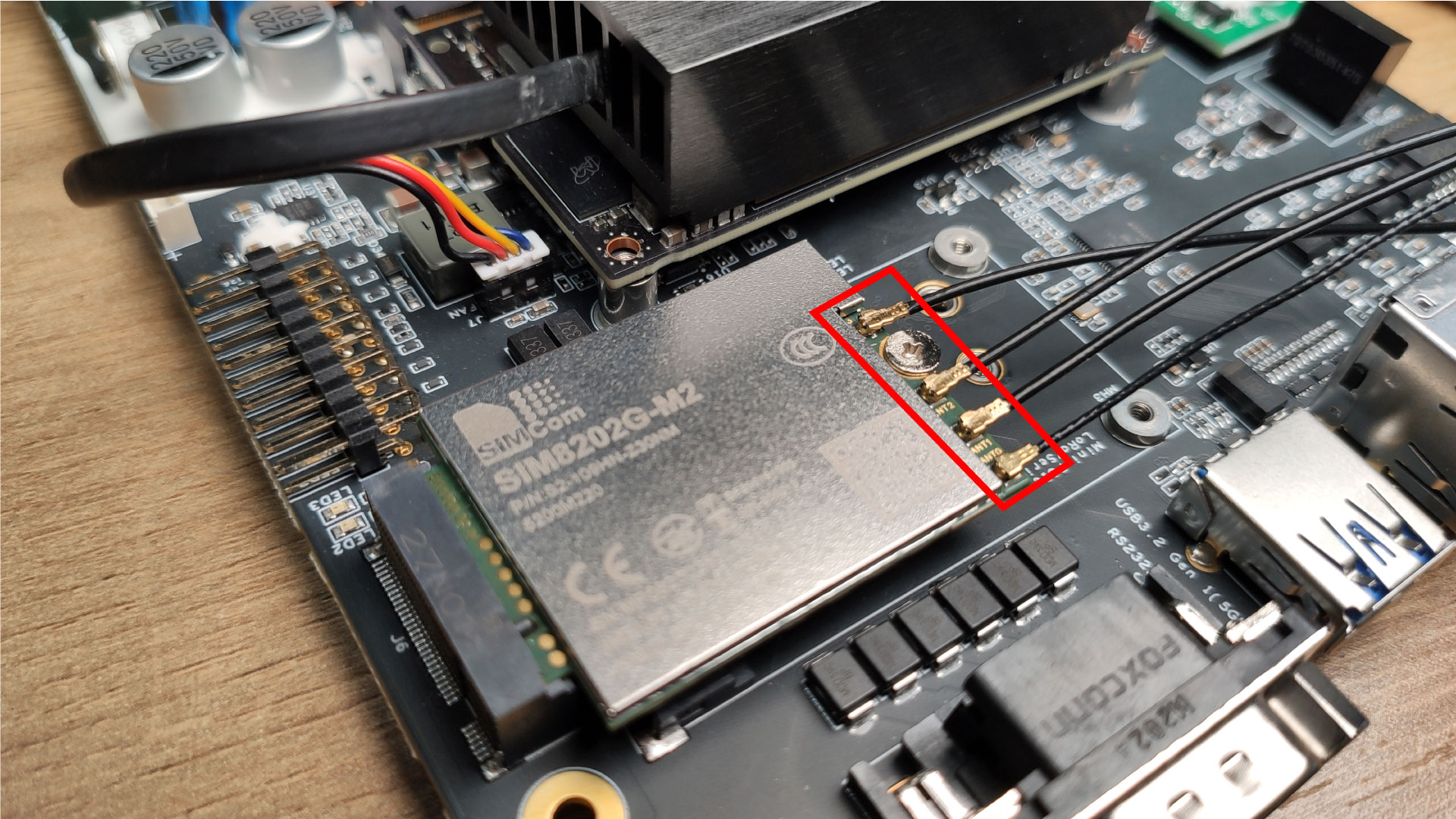
- Step 3: Connect 4 antennas to the the antenna connectors on the module. Here you need to use an IPEX 4 connector
- Step 4: Insert a 5G-enabled nano SIM card to the SIM card slot on the board making sure the gold surface of the SIM card is facing down. Here insert the card all the way in so that it will bounce back after hitting the internal spring and lock in place.
If you want to remove the SIM card, push the card in to hit the internal spring so that the SIM will come out of the slot
- Step 5: Power on the board
5G Module Usage - Test Dialing
When using the SIM8202G-M2 5G module, the module will not automatically start. So we first need to toggle a few GPIOs to make it start
Step 1: Enter the following to start the 5G module
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 309 > export
cd gpio309
echo out > direction
echo 0 > value
cd..
echo 341 > export
cd PEE.02
echo out > direction
echo 1 > value
cd..
echo 330 > export
cd PCC.02
echo out > direction
echo 0 > value
sudo gpioset --mode=wait gpiochip2 9=0
sudo gpioset --mode=wait gpiochip1 25=1
sudo gpioset --mode=wait gpiochip1 14=0
Please open multiple terminals to run these commands, and make sure each terminal window remains active.
Once the above is executed, LED2 will light up in green as below
Step 2: Install minicom
sudo apt update
sudo apt install minicom -y
Step 3: Enter the serial console of the connected 5G module so that we can enter AT commands and interact with the 5G module
sudo minicom -D /dev/ttyUSB2 -b 115200
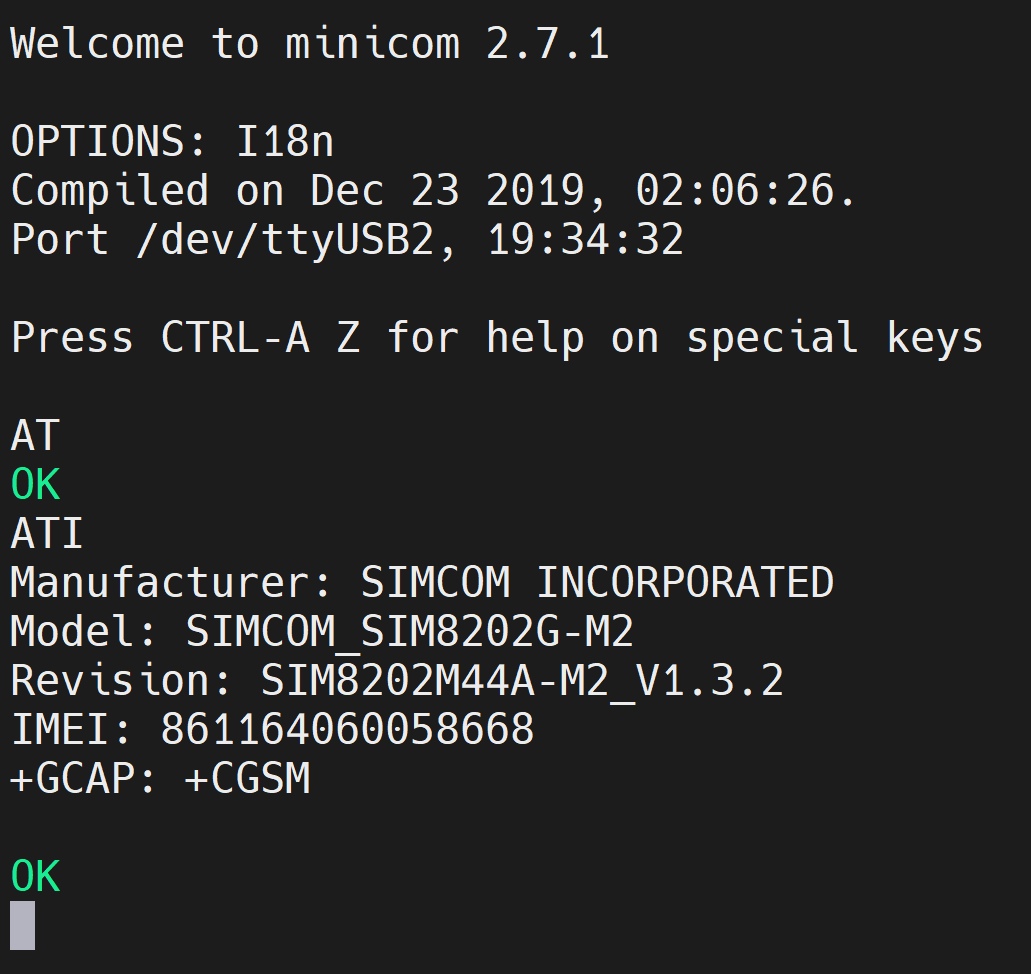
Step 4: Enter the command "AT" and press enter. If you see the response as "OK", the 5G module is working properly
Step 5: Enter the command "ATI" to check the module information
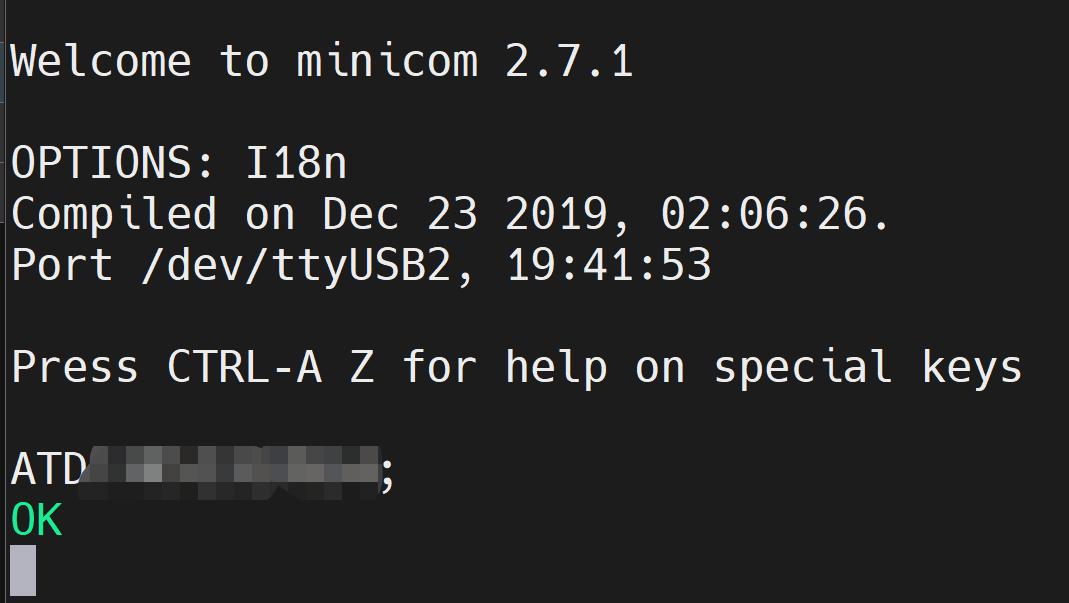
Step 6: To test the module, enter the below command to call another phone number
ATD<phone_number>;
And you will see the below output
DI/ DO
reComputer Industrial supports 4 digital input and 4 digital output channels, all of which are optically isolated to effectively protect the mainboard from voltage spikes or other electrical disturbances. There is also a CAN interface on this same connector which we will discuss later in this wiki
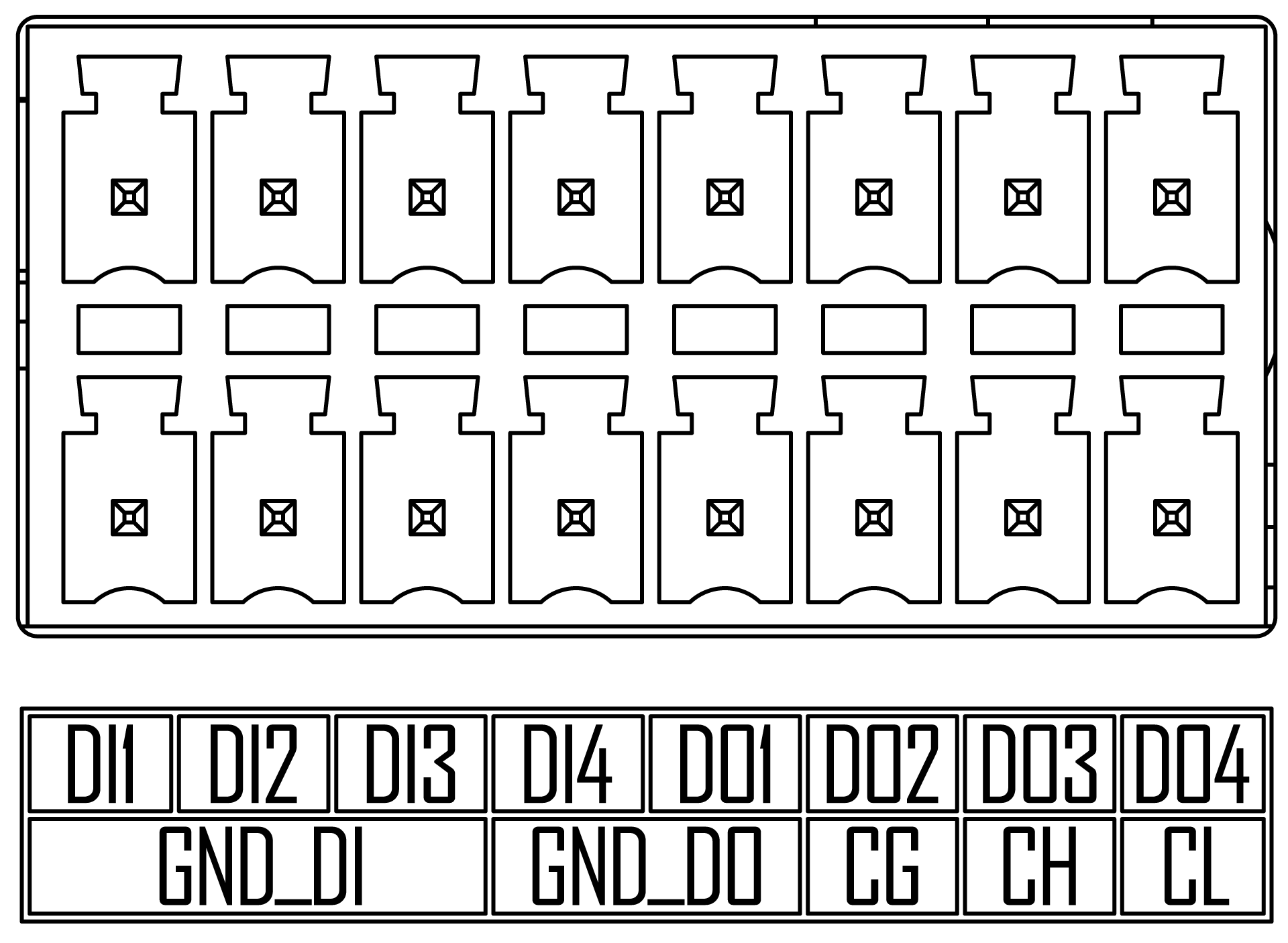
DI/ DO Pin Assignment Table
| Type | Label Name | Schematic Signal | Module Pin Number | BGA Number | GPIO Number | V/A Limits | Note |
|---|---|---|---|---|---|---|---|
| Input | DI1 | DI_1_GPIO01 | 118 | PQ.05 | 453 | 12V/ 20mA current in total | 12V Digital Input, ground signal needs to be connected to GND_DI (Pin2/4/6) |
| DI2 | DI_2_GPIO09 | 211 | PAC.06 | 492 | |||
| DI3 | DI_3_GPIO11 | 216 | PQ.06 | 454 | |||
| DI4 | DI_4_GPIO13 | 228 | PH.00 | 391 | |||
| Output | DO1 | DO_1_GPIO | 193 | PI.00 | 399 | 40V/40mA load per pin | Digital output, maximum withstand voltage 40V, ground signal needs to be connected to GND_DO(Pin8/10) |
| DO2 | DO_2_GPIO | 195 | PI.01 | 400 | |||
| DO3 | DO_3_GPIO | 197 | PI.02 | 401 | |||
| DO4 | DO_4_GPIO | 199 | PH.07 | 398 | |||
| CAN | CH | / | CAN bus with standard differential signals, ground signal needs to be connected to GND_ISO (Pin 12) | ||||
| CL | |||||||
| Ground | GND_DI | / | The reference ground signal for the 12V Digital Input, which is also the return path for the DI | ||||
| GND_DO | The reference ground signal of the digital output, which is also the return path of the DO | ||||||
| CG | The reference ground signal for CAN | ||||||
Please note that the pin numbers in the table above are only valid for Jetpack5. We can obtain the pin numbers for Jetpack6 in the following ways:
- Use the
gpioinfocommand to get the GPIO table. - Check the BGA Number to find the corresponding pin number on Jetpack6.
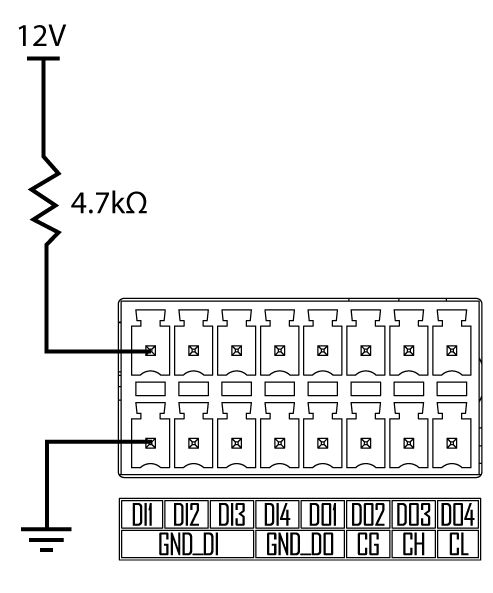
Connection Overview for DI
You can make the connection for DI by following the diagram below. It is better to add a resistor in series for the DI line. Here we have tested with a 4.7kΩ resistor connected to the DI1 pin.
Usage for DI
You need to input a voltage of 12V on the DI line in order to get detected as an input
Step 1: Make the connetions as shown above to DI1 pin and input 12V
Step 2: Open and check the status for DI1 as follows:
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 453 > export
cd PQ.05
cat value
You can refer the DI/ DO Pin Assignment Table to find the GPIO number and BGA number. In the above example, for DI1 pin, GPIO number is 453 and BGA number is PQ.05
sudo gpioget gpiochip0 105
If it outputs 0, that means there is 12V input. If it outputs 1, that means there is no input voltage.
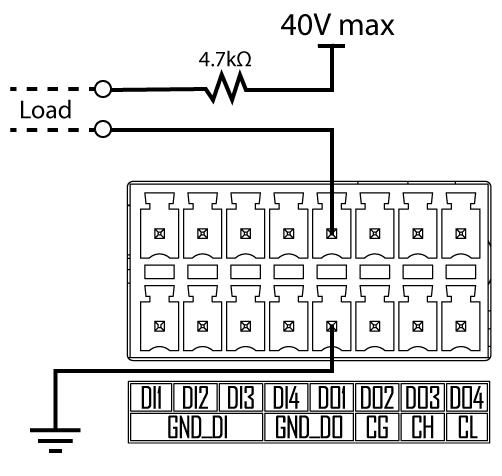
Connection Overview for DO
You can make the connection for DO by following the diagram below. It is better to add a resistor in series for the DO line. Here we have tested with a 4.7kΩ resistor
Usage for DO
Here you need to connect a load as mentioned in the above diagram. The easiest way to test this would be to connect a multimeter if you have access to one, or else connect a load that requires less than 40V maximum voltage
Step 1: Make the connetions as shown above to DO1 pin and input 40V as max
Step 2: Open and turn on the GPIO for D01 as follows:
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 399 > export
cd PI.00
echo out > direction
echo 1 > value
You can refer the DI/ DO Pin Assignment Table to find the GPIO number and BGA number. In the above example, for DO1 pin, GPIO number is 399 and BGA number is PI.00
sudo gpioset --mode=wait gpiochip0 51=1
If the load is turned on or the multimeter outputs the voltage that you have input, the test it is functioning properly.
CAN
reComputer Industrial features a CAN interface that supports the CAN FD (Controller Area Network Flexible Data-Rate) protocol at 5Mbps. The CAN interface is isolated using capacitive isolation, which provides excellent EMI protection and ensures reliable communication in industrial and automation applications. A terminal resistor of 120Ω has been installed by default and you can toggle this resistor ON and OFF using GPIO.
Note: The CAN interface uses an isolated power supply, which means that the ground signal for external devices connected to the CAN interface should be connected to the CG pin
Connection Overview with USB to CAN Adapter
To test and interface with CAN bus, connect a USB to CAN adapter to the CAN connectors on the board as shown below
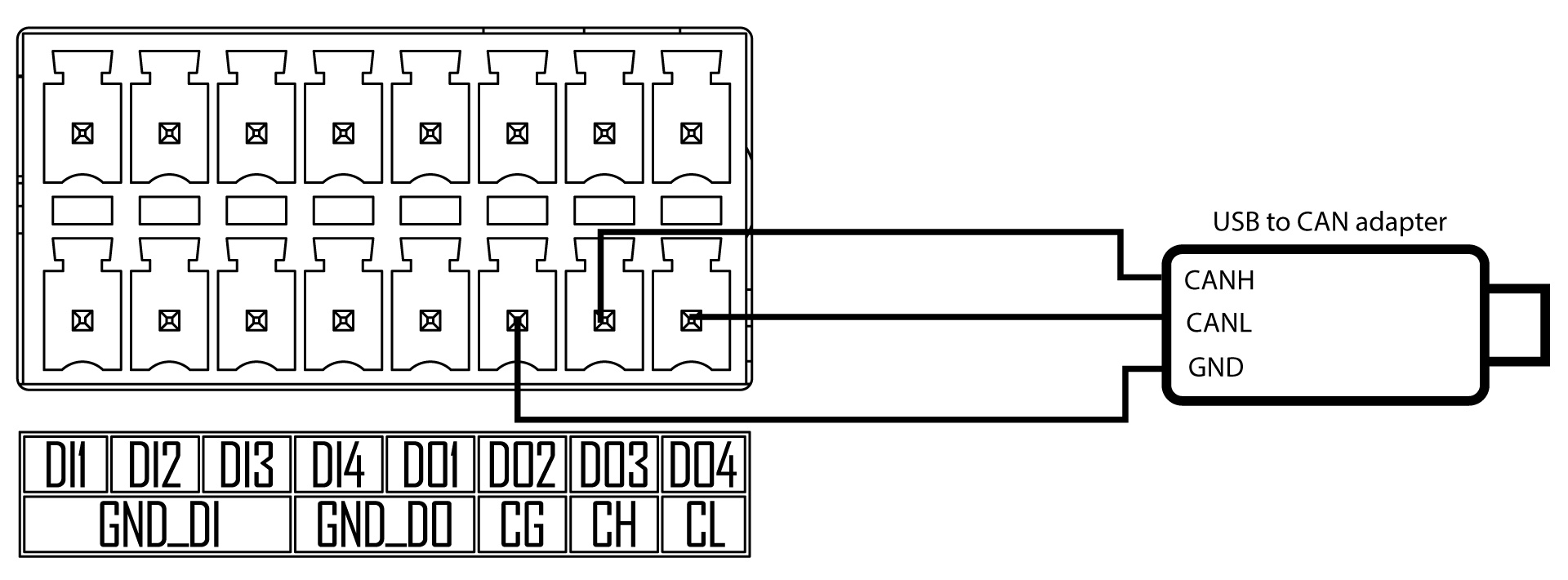
Here we have used USB to CAN Analyzer Adapter with USB Cable available on our Bazaar.
Usage with USB to CAN Adapter
-
Step 1: Download the driver for the USB to CAN adapter you are using from the manufacturer's website and install it. In our case, according to the adapter that we used, the drivers can be found here
-
Step 2: Some adapters also come with the necessary software for the PC in order to communicate with the CAN device. In our case, according to the adapter that we used, we have downloaded and installed the software which can be found here
-
Step 3: Open a terminal window on the reComputer Industrial and execute the following commands to configure and enable the CAN interface
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 125000
sudo ip link set can0 up
- Step 4: Type ifconfig on the terminal and you will see the CAN interface in enabled

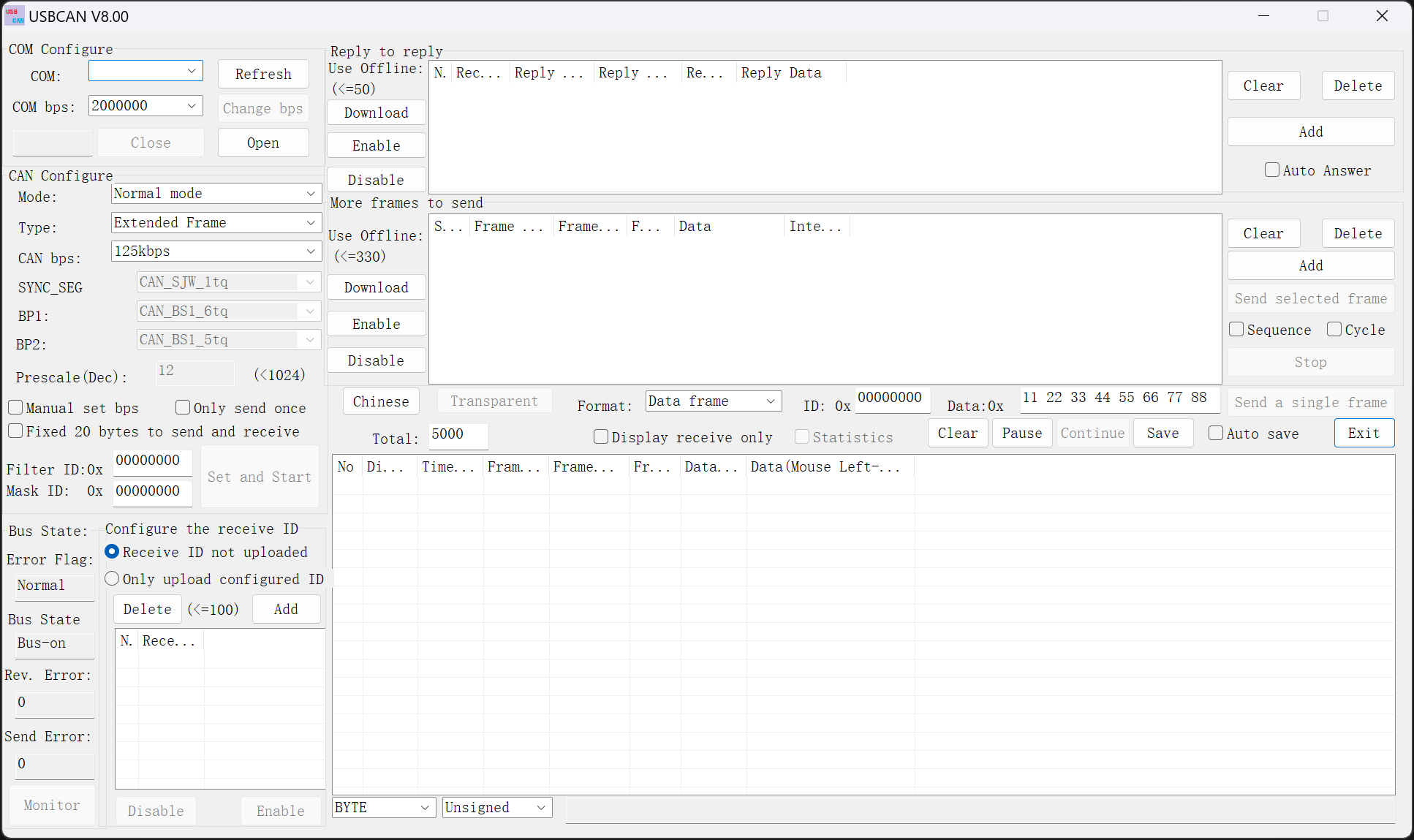
- Step 5: Open the CAN software that you have installed before. In this case, we will open the software that we installed according to the CAN adapter that we are using
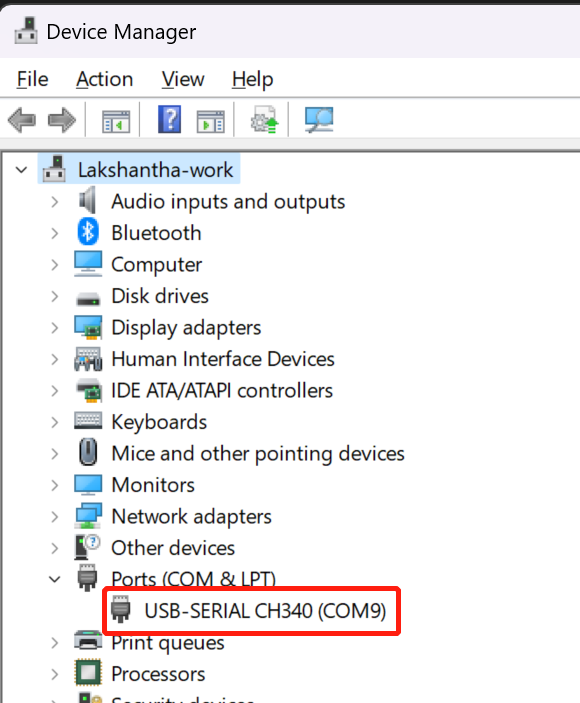
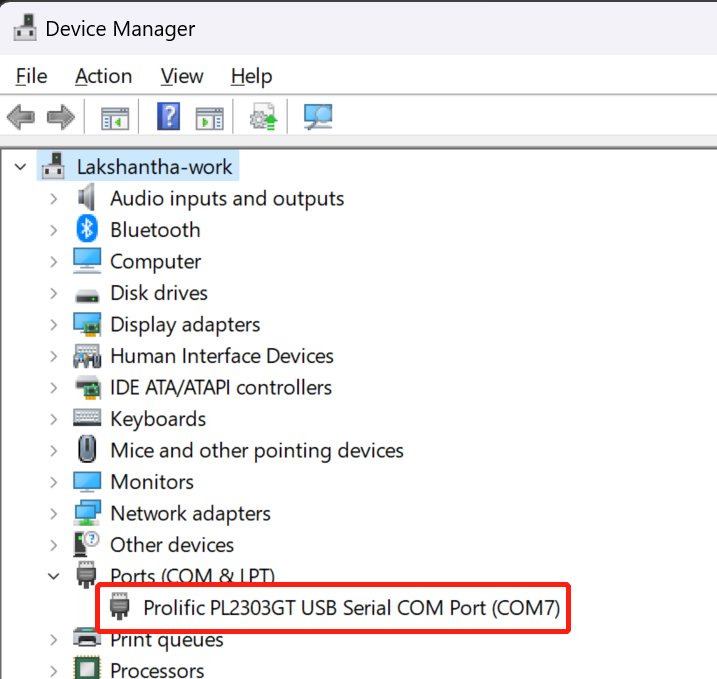
- Step 6: Connect the USB to CAN adapter to the PC and open Device Manager by searching it on windows search bar. Now you will see the connected adapter under Ports (COM & LPT). Make a note of the serial port listed here. According to the below image, the serial port is COM9
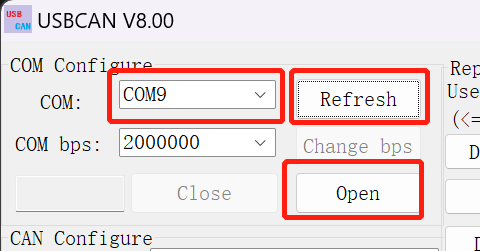
- Step 7: Open the CAN software, click Refresh next to COM section, click the drop-down-menu and select the serial port according to the connected adapter. Keep the COM bps at default and click Open
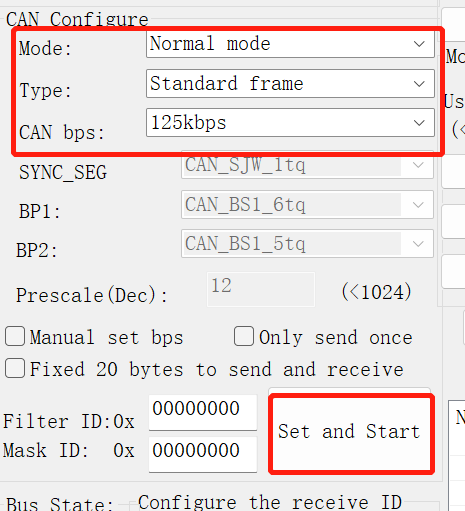
- Step 8: Keep the Mode and CAN bps at default, change the Type to Standard frame and click Set and Start
- Step 9: On reComputer Industrial, execute the following command to send a CAN signal to the PC
cansend can0 123#abcdabcd
Now you will see the above signal received by the software as shown below

- Step 10: On reComputer Industrial, execute the following command to wait for receiving CAN signals from the PC
candump can0 &
- Step 11: On the CAN software, click Send a single frame

Now you will see it received by reComputer Industrial as follows

Connection Overview with reTerminal DM
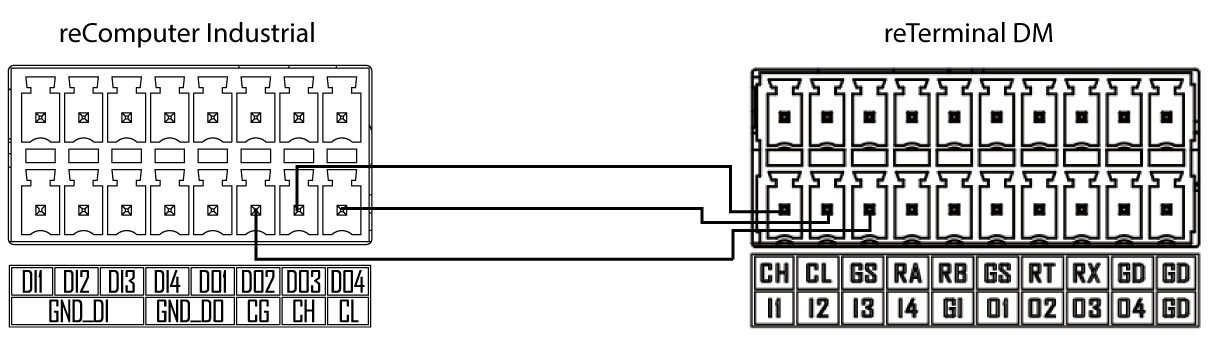
If you have access to a reTerminal DM, you can communicate with it directly because reTerminal DM also has a CAN interface.
Refer to the below image to connect reComputer Industrial and reTerminal DM via CAN
Usage with reTerminal DM
-
Step 1: Before using reTerminal DM, visit this wiki to get started with reTerminal DM
-
Step 2: Open a terminal window on the reComputer Industrial and execute the following commands to configure and enable the CAN interface
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 125000
sudo ip link set can0 up
- Step 3: Open a terminal window on the reTerminal DM and execute the following commands to configure and enable the CAN interface
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 125000
sudo ip link set can0 up
- Step 4: Open a terminal window on the reTerminal DM and execute the following commands to configure and enable the CAN interface
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 125000
sudo ip link set can0 up
- Step 5: If you type ifconfig on both devices, you will see the CAN interfaces are enabled
- Step 6: On the reTerminal DM, execute the following to wait for receiving CAN signals from the reComputer Industrial
candump can0 &
- Step 7: On the reComputer Industrial, execute the following command to send a CAN signal to the reTerminal Industrial
cansend can0 123#abcdabcd
Now you will see it received by reTerminal DM as follows
- Step 8: Repeat step 6 and step 7 but interchanging the devices. Use reTerminal DM to send CAN signals and use reComputer Industrial to receive them
RS232/ RS422/ RS485 interfaces
reComputer Industrial has a DB9 connector which supports RS232, RS422 and RS485 communication protocols and there is a DIP switch panel onboard to switch between the different interface options
You can see the DIP switch panel as below:
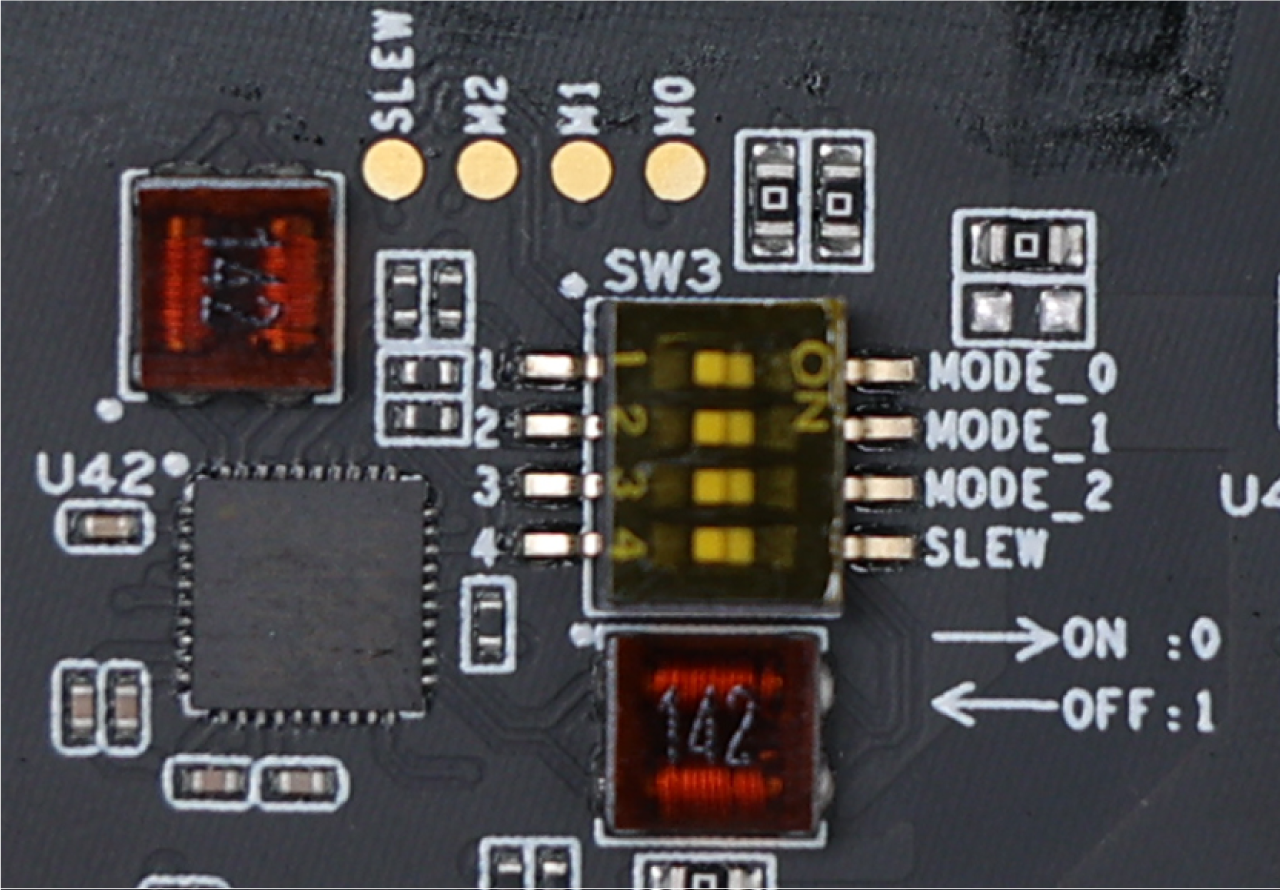
Make sure to remove the yellow plastic cover before using the DIP switch panel
And the below table explains the different modes based on the DIP switch positions
| MODE_0 | MODE_1 | MODE_2 | Mode | Status | |
|---|---|---|---|---|---|
 | 0 | 0 | 0 | RS-422 Full Duplex | 1T/1R RS-422 |
 | 0 | 0 | 1 | Pure RS-232 | 3T/5R RS-232 |
 | 0 | 1 | 0 | RS-485 Half Duplex | 1T/1R RS-485 ,TX ENABLE Low Active |
 | 0 | 1 | 1 | RS-485 Half Duplex | 1T/1R RS-485 ,TX ENABLE High Active |
 | 1 | 0 | 0 | RS-422 Full Duplex | 1T/1R RS-422 with termination resistor |
 | 1 | 0 | 1 | Pure RS-232 | 1T/1R RS-232 co-exists with RS485 |
| application without the need for the bus | |||||
| switch IC (for special usage). | |||||
 | 1 | 1 | 0 | RS-485 Half Duplex | 1T/1R RS-485 with termination resistor |
| TX ENABLE Low Active | |||||
 | 1 | 1 | 1 | Low Power | All I/O pins are High Impedance |
| Shutdown |
Out of the box, the default mode of the switches will be set to RS485 with 010 from factory
The above table takes into account the first three switches of the DIP switch panel. However, the fourth switch is responsible to toggle the slew rate which is directly related to the data rate
| Status | Note | |
|---|---|---|
 | 1 | SLEW= Vcc This RS232/RS422/RS485 Multiprotocol Transceiver limits the communication rateas follows : RS-232: MaximumData Rate is 1.5Mbps RS-485/RS-422; MaximumData Rate is 10Mbps The actual Maximum Data Rate depends on the Jetson SO Mused |
 | 0 | SLEW = GND RS-232: Maximum Data Rate is 250Kbps RS-485/RS-422: Maximum Data Rate is 250kbps |
Here we will be using USB to RS232, RS485 and RS422 adapters in order to test the interfaces. So before moving on, you need to install a serial terminal application on your PC. Here we recommend you to install Putty which is easy to setup and use.
- Step 1: Visit this website and download Putty according to your PC architecture
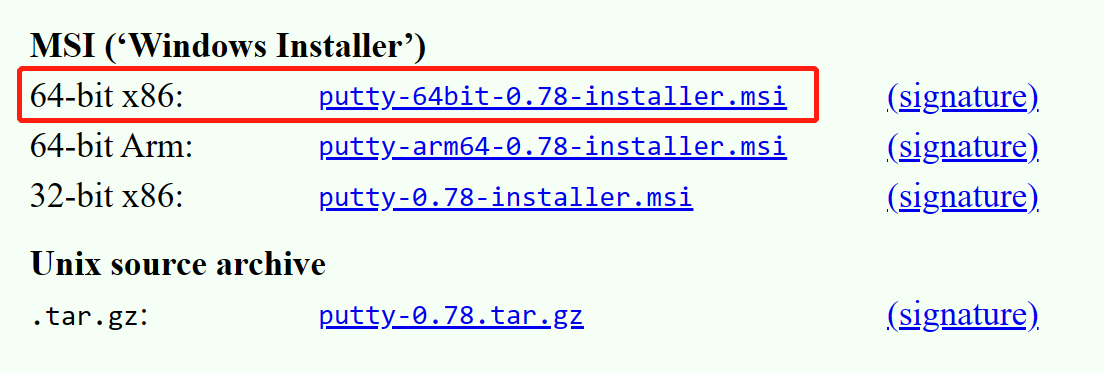
Here we have selected Putty according to the PC that we used which is a X86 windows 64-bit machine
- Step 2: Open the downloaded setup and go through the prompts to install the application
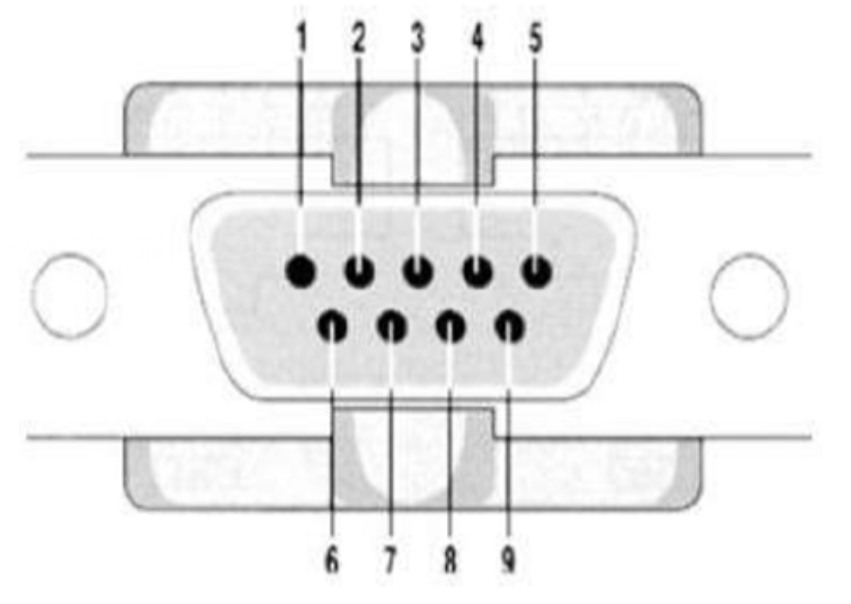
General Connection Overview
You can refer to the pin numbering of DB9 connector and the table to make the connections
| MODE | 001/101 | 000/100 | 010/011/110 |
|---|---|---|---|
| PIN | RS232 | RS422 | RS485 |
| 1 | TXD- | Data- | |
| 2 | RXD | TXD+ | Data+ |
| 3 | TXD | RXD+ | |
| 4 | RXD- | ||
| 5 | GND | GND | GND |
| 6 | |||
| 7 | RTS | ||
| 8 | CTS | ||
| 9 |
RS232 Connection Overview
Here you can use a USB to RS232 adapter to test the interface. We have used UGREEN USB to RS232 Adapter for our testing.
Step 1: Turn off the board
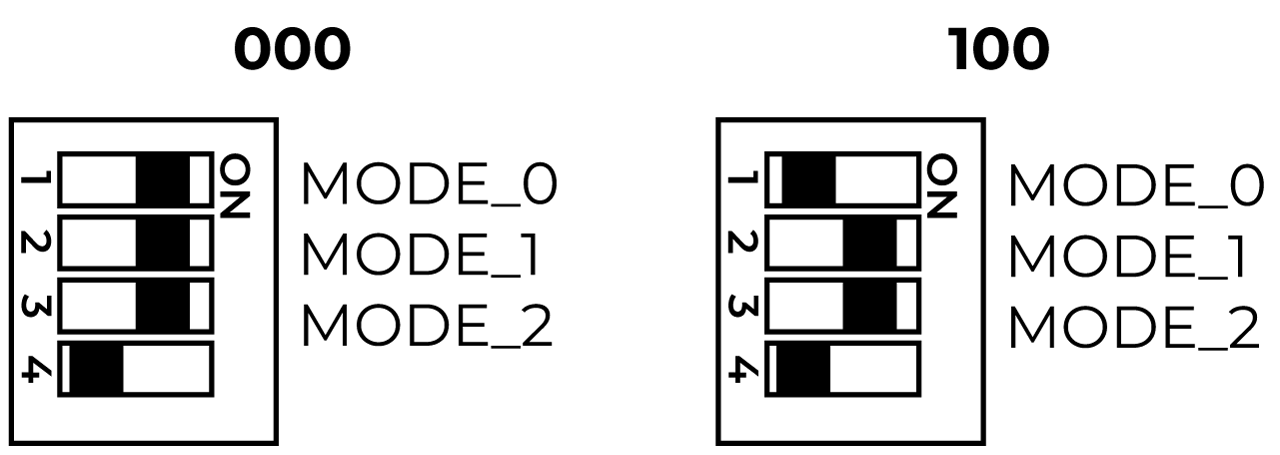
Step 2: Here we have 2 options to set the DIP switches. Either in 001 mode or 101 mode. The switch positions for each mode is shown below
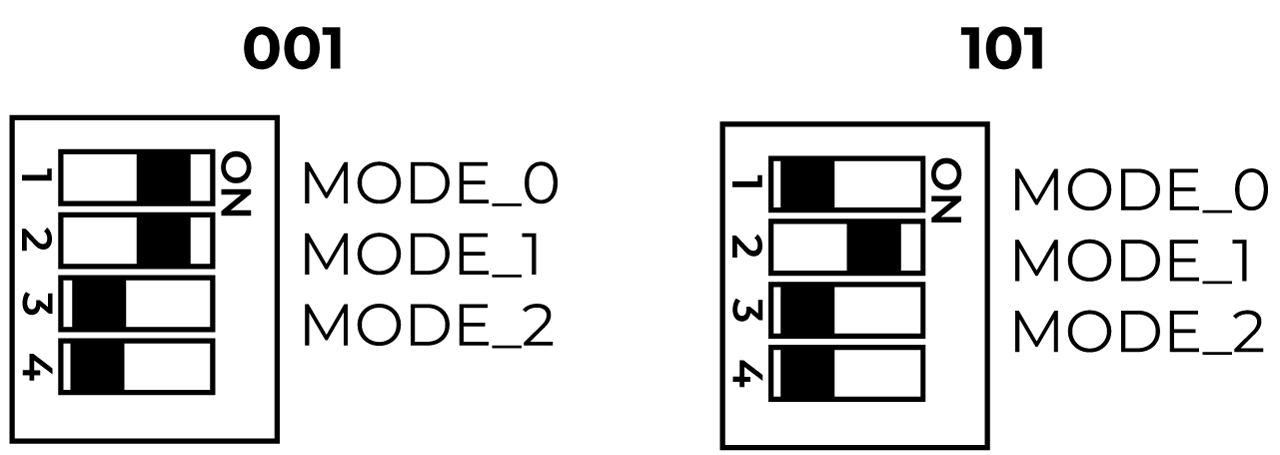
Step 3: Connect the USB to RS232 adapter to the DB9 connector. Here we have connected the adapter that we have mentioned above

Step 4: Connect the other end to one of the USB ports on your PC
Step 5: Turn on the board
RS232 Usage
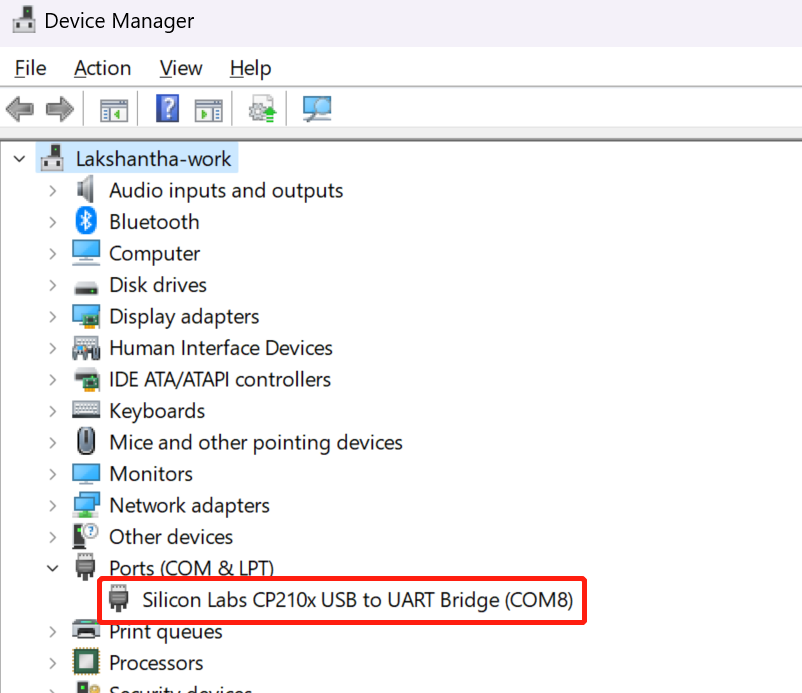
Step 1: You may need to install a driver for the adapter that you are using or windows will automatically install the driver for you. Go to Device Manager by typing Device Manager inside windows search and check whether you can see the conenected adapter as a COM device.
Step 2: If you cannot see the adapter, you need to install the driver according to the adapter that you are using. You can generally find these drivers on the manufacturer website. For the adapter that we are using, you can this page, search for 20201 as the model number and download the driver accordingly
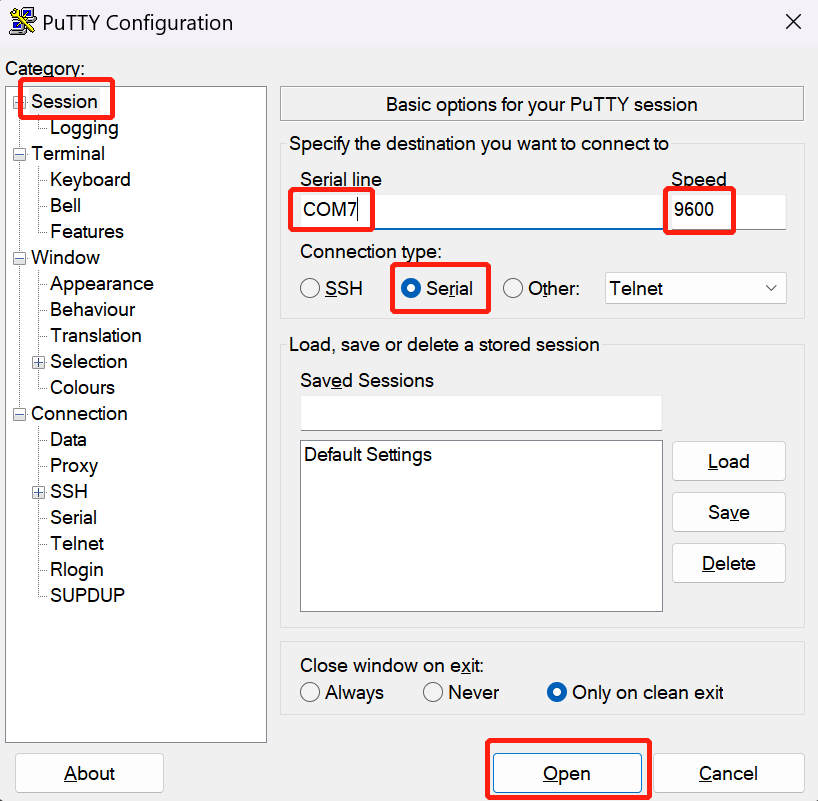
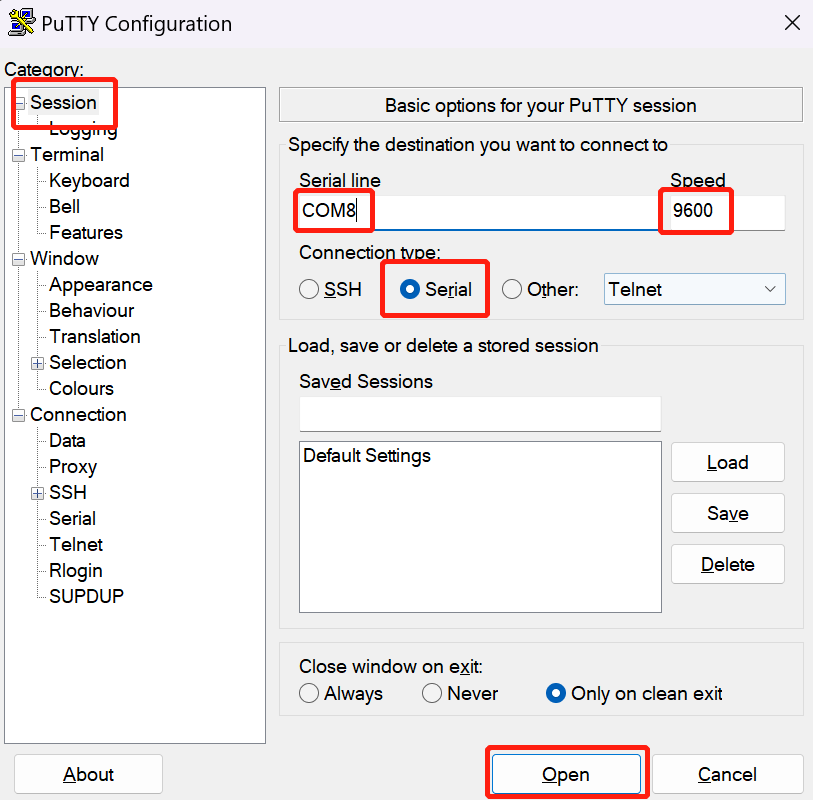
Step 3: Open Putty on the PC, select the Terminal section set the following
- Local echo: Force on
- Local line editing: Force on
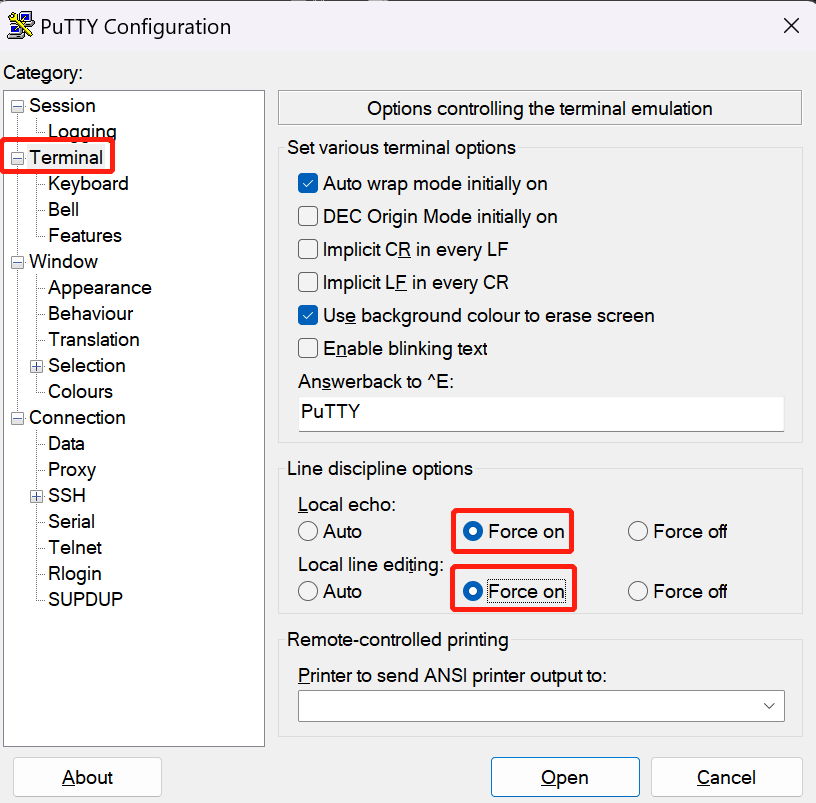
Step 4: Select Session, under Coonection type, select Serial, set the serial port number according to what you see on Device Manager, keep the Speed as default (9600) and click Open
Step 5: On the reTerminal Industrial terminal window, type the following to send a signal from the reComputer to the PC
- Jetpack5
- Jetpack6
sudo chmod 777 /dev/ttyTHS0
sudo echo "RS232 message from reComputer Industrial" > /dev/ttyTHS0
sudo chmod 777 /dev/ttyTHS1
sudo echo "RS232 message from reComputer Industrial" > /dev/ttyTHS1
Now you will see this message displayed on Putty

Step 6: On the reTerminal Industrial terminal window, type the following to wait for receiving signals from the PC
- Jetpack5
- Jetpack6
sudo cat /dev/ttyTHS0
sudo cat /dev/ttyTHS1
On Putty, type anything, press ENTER and it will be displayed on the reComputer Industrial terminal window

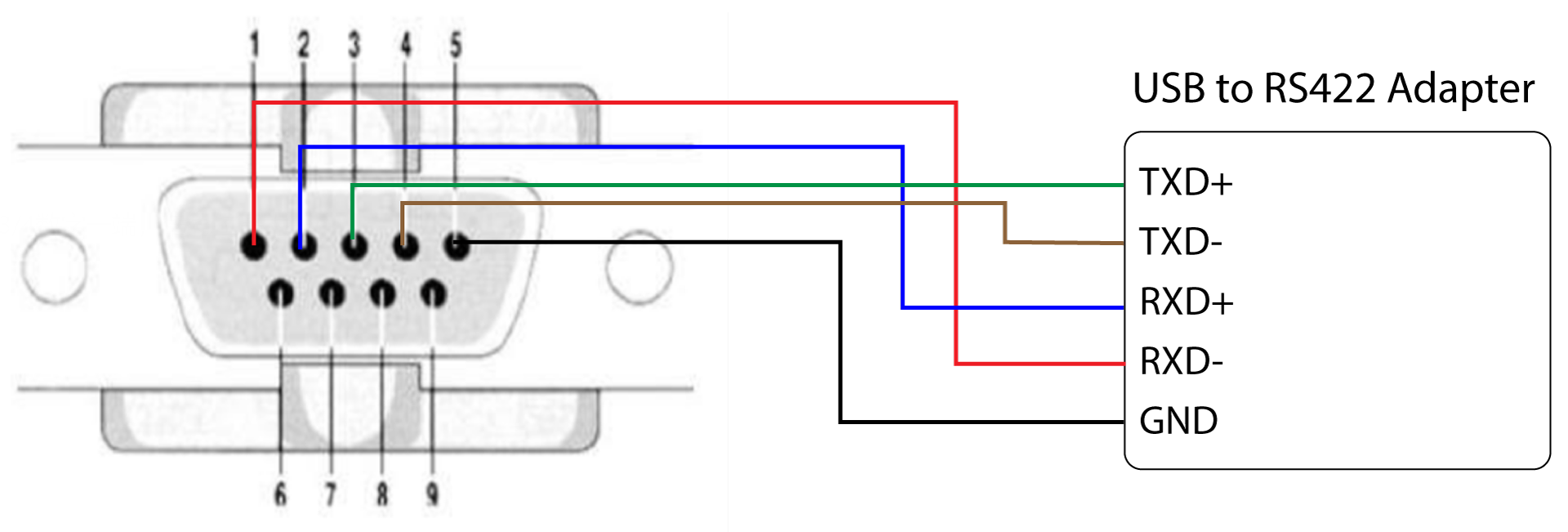
RS422 Connection Overview
Here you can use a USB to RS422 adapter to test the interface. We have used DTech USB to RS485 Adapter for our testing.
Step 1: Turn off the board
Step 2: Here we have 2 options to set the DIP switches. Either in 000 mode or 100 mode. The switch positions for each mode is shown below
Step 3: Connect the USB to RS422 adapter to the DB9 connector using Jumper wires as shown below. Here we have connected the adapter that we have mentioned above
Step 4: Connect the other end to one of the USB ports on your PC
Step 5: Turn on the board
RS422 Usage
Step 1: You may need to install a driver for the adapter that you are using or windows will automatically install the driver for you. Go to Device Manager by typing Device Manager inside windows search and check whether you can see the connected adapter as a COM device.
Step 2: If you cannot see the adapter, you need to install the driver according to the adapter that you are using. You can generally find these drivers on the manufacturer website. For the adapter that we are using, you can this page
Step 3: Open Putty on the PC, select the Terminal section set the following
- Local echo: Force on
- Local line editing: Force on
Step 4: Select Session, under Coonection type, select Serial, set the serial port number according to what you see on Device Manager, keep the Speed as default (9600) and click Open
Step 5: On the reTerminal Industrial terminal window, type the following to send a signal from the reComputer to the PC
- Jetpack5
- Jetpack6
sudo chmod 777 /dev/ttyTHS0
sudo echo "RS422 message from reComputer Industrial" > /dev/ttyTHS0
sudo chmod 777 /dev/ttyTHS1
sudo echo "RS422 message from reComputer Industrial" > /dev/ttyTHS1
Now you will see this message displayed on Putty
Step 6: On the reTerminal Industrial terminal window, type the following to wait for receiving signals from the PC
- Jetpack5
- Jetpack6
sudo cat /dev/ttyTHS0
sudo cat /dev/ttyTHS1
On Putty, type anything, press ENTER and it will be displayed on the reComputer Industrial terminal window
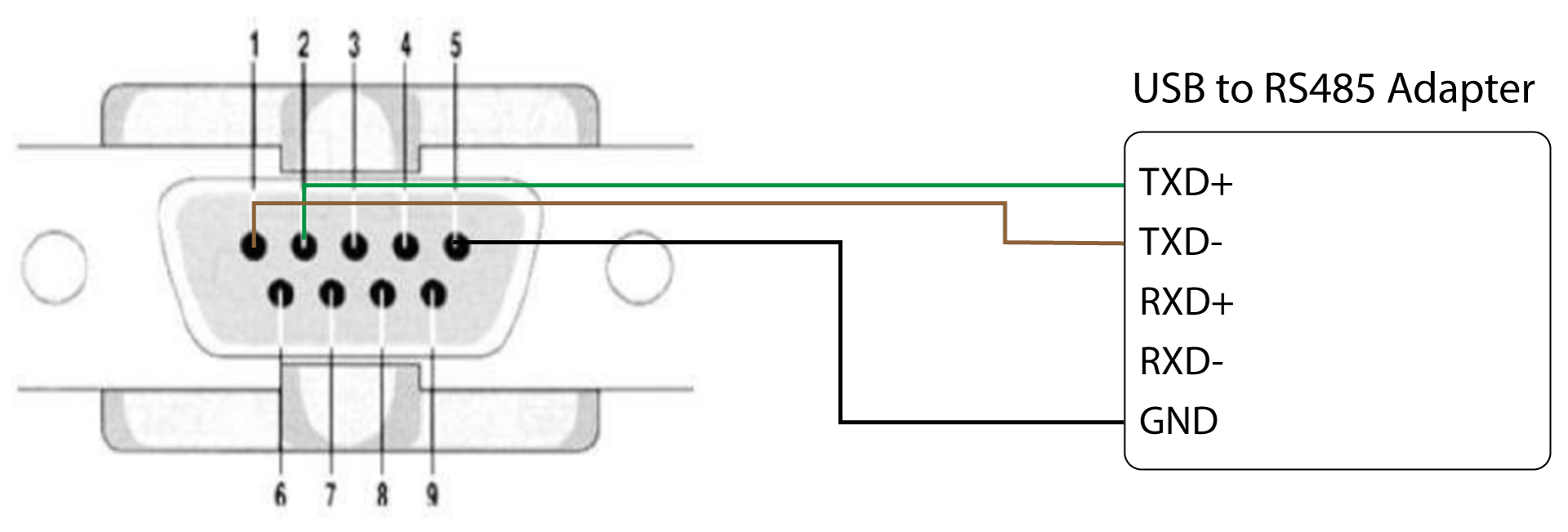
RS485 Connection Overview
Here you can use a USB to RS422 adapter to test the interface. We have used DTech USB to RS485 Adapter for our testing.
Step 1: Turn off the board
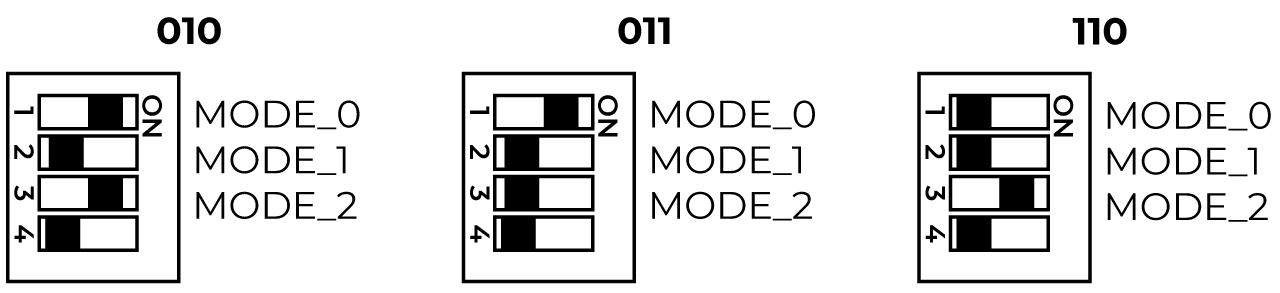
Step 2: Here we have 3 options to set the DIP switches. Either in 010 mode or 011 mode or 110 mode. The switch positions for each mode is shown below
Step 3: Connect the USB to RS422 adapter to the DB9 connector using Jumper wires as shown below. Here we have connected the adapter that we have mentioned above
Step 4: Connect the other end to one of the USB ports on your PC
Step 5: Turn on the board
RS485 Usage
Step 1: You may need to install a driver for the adapter that you are using or windows will automatically install the driver for you. Go to Device Manager by typing Device Manager inside windows search and check whether you can see the conenected adapter as a COM device.
Step 2: If you cannot see the adapter, you need to install the driver according to the adapter that you are using. You can generally find these drivers on the manufacturer website. For the adapter that we are using, you can this page
Step 3: Open Putty on the PC, select the Terminal section set the following
- Local echo: Force on
- Local line editing: Force on
Step 4: Select Session, under Coonection type, select Serial, set the serial port number according to what you see on Device Manager, keep the Speed as default (9600) and click Open
Step 5: On the reTerminal Industrial terminal window, type the following to send a signal from the reComputer to the PC
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 460 > export
cd PR.04
echo out > direction
echo 0 > value
echo "RS485 message from reComputer Industrial" > /dev/ttyTHS0
sudo chmod 777 /dev/ttyTHS1
sudo gpioset gpiochip0 112=0
echo "RS485 message from reComputer Industrial" > /dev/ttyTHS1
Now you will see this message displayed on Putty
Step 6: On the reTerminal Industrial terminal window, type the following to wait for receiving signals from the PC
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 460 > export
cd PR.04
echo out > direction
echo 1 > value
cat /dev/ttyTHS0
sudo chmod 777 /dev/ttyTHS1
sudo gpioset gpiochip0 112=1
cat /dev/ttyTHS1
On Putty, type anything, press ENTER and it will be displayed on the reComputer Industrial terminal window
Gigabit Ethernet Connectors
There are two Gigabit Ethernet (10/100/1000M) Connectors on the reComputer Industrial and they function in different ways
- The leftmost connector is directy connected to the Jetson module and is able to provide PoE functionality with PSE 802.3 af, 15W specification. This means you can connect a PoE IP camera or any other PoE device to this port to provide power to the connected device.
- The other connector is connected via a PCIe to Ethernet (LAN7430-I/Y9X) module
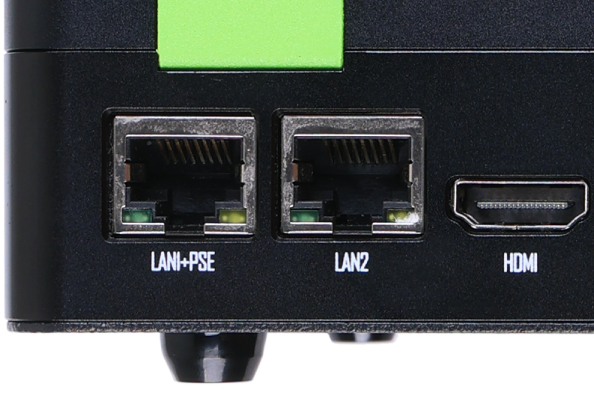
There are 2 LEDs (green and yellow) on each Ethernet port which indicates the following
- Green LED: ON only when connected to 1000M network
- Yellow LED: Shows the network activity status
USB
reComputer Industrial comes with 3x USB3.2 connectors onboard and has the following features:
- On the dual stacked USB connectors, the upper and lower USB ports share a current-limiting IC, with a total power supply capacity of 2.1A maximum output current (single can also be 2.1A). If over 2.1A, it will enter the over-current protection state.
- On the single USB connector next to the dual stacked USB connectors, it has a total power supply capacity of 2.1A maximum output current. If over 2.1A, it will enter the over-current protection state.
- Orin NX module comes with 3 USB3.2, only one of which is used in reComputer and converted to 3 ways. (USB3.1 TYPE-A x2 - J4 and USB3.1 TYPE-A x1 -J3).
- Only supports USB Host, not Device mode
- Provide 5V 2.1A
- Hot-swappable
Usage
We will explain how to do a simple benchmark on a connected USB flash drive
- Step 1: Check the write speed by executing the below command
sudo dd if=/dev/zero of=/dev/$1 bs=100M count=10 conv=fdatasync
- Step 2: Check the read speed by executing the below commands. Make sure to execute this after executing the above command for write speed.
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sudo dd if=/dev/$1 of=/dev/null bs=100M count=10
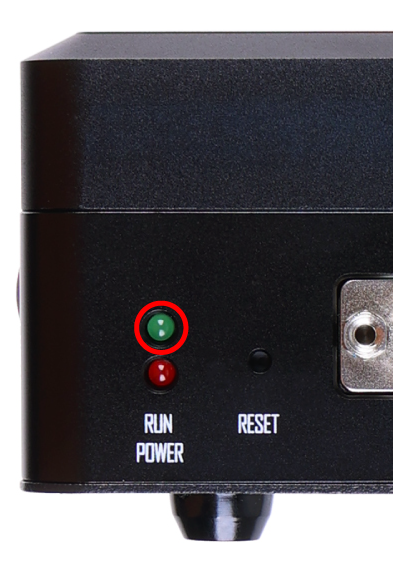
Configurable LED
There is a Green color LED located on the board as shown below. By default it is acting as the LED which shows the device is running properly. However, you can program this LED to turn ON and OFF by the system as well
Usage
- Jetpack5
- Jetpack6
Step 1: Enter the following commands on a terminal window to access the Green color LED
sudo -i
cd /sys/class/gpio
echo 329 > export
cd PCC.01
echo out > direction
Step 2: Turn OFF the LED
echo 0 > value
Step 3: Turn ON the LED
echo 1 > value
If you have finished using the LED, you can execute the following
cd ..
echo 329 > unexport
Turn OFF the LED:
sudo gpioset gpiochip1 13=0
Turn ON the LED:
sudo gpioset gpiochip1 13=1
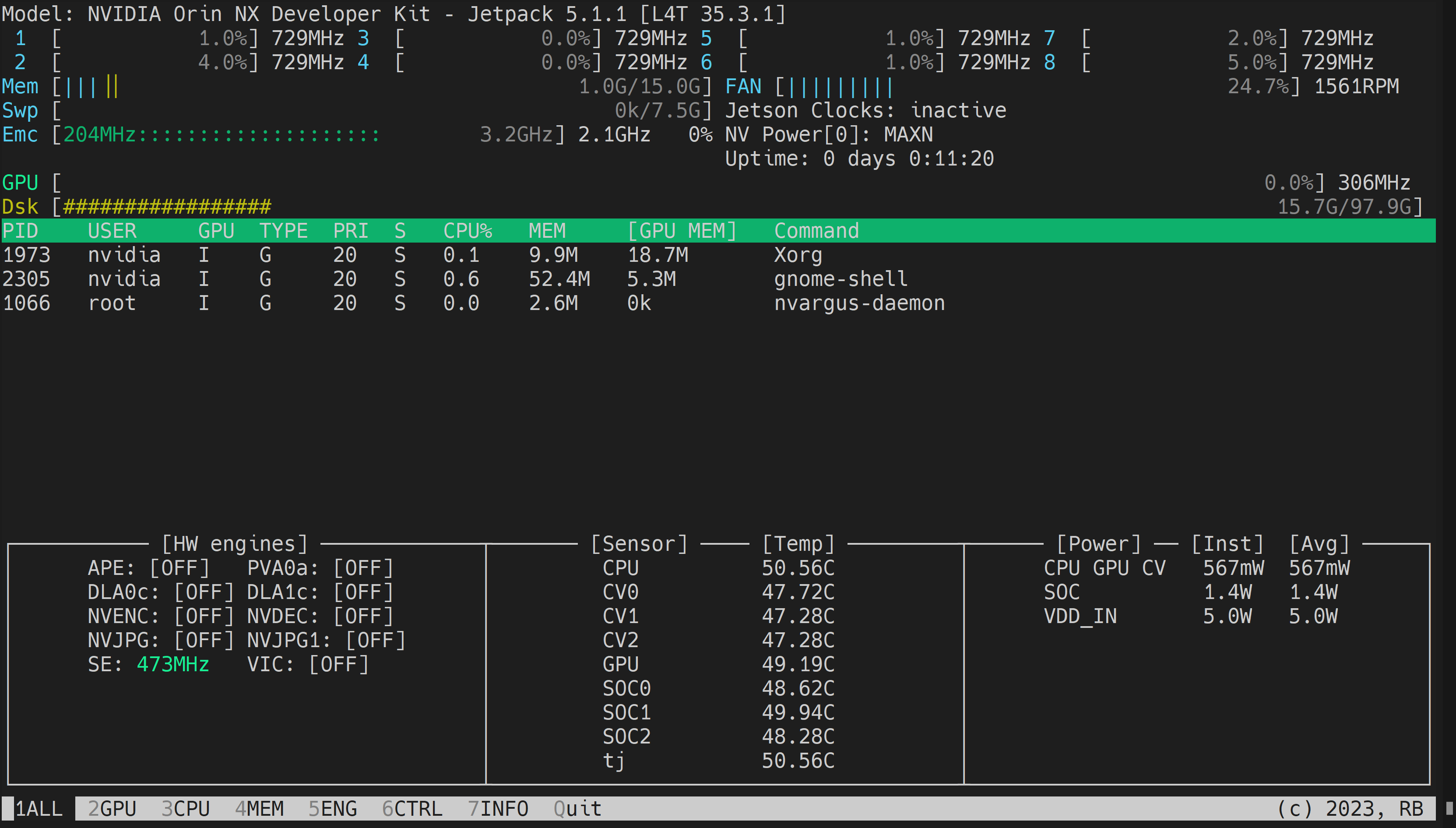
Monitor System Performance
We can use jetson stats application to monitor the temperatures of the system components and check other system details such as
-
View CPU, GPU, RAM utilizations
-
Change power modes
-
Set to max clocks
-
Check JetPack information
-
Step 1: On the reComputer Industrial terminal windows, type the following
sudo apt update
sudo apt install python3-pip -y
sudo pip3 install jetson-stats
- Step 2: Reboot the board
sudo reboot
- Step 3: Type the following on the terminal
jtop
Now jtop application will open as follows
- Step 4: Here you can cycle through the different pages of the applications and explore all the features!
WiFi and Bluetooth
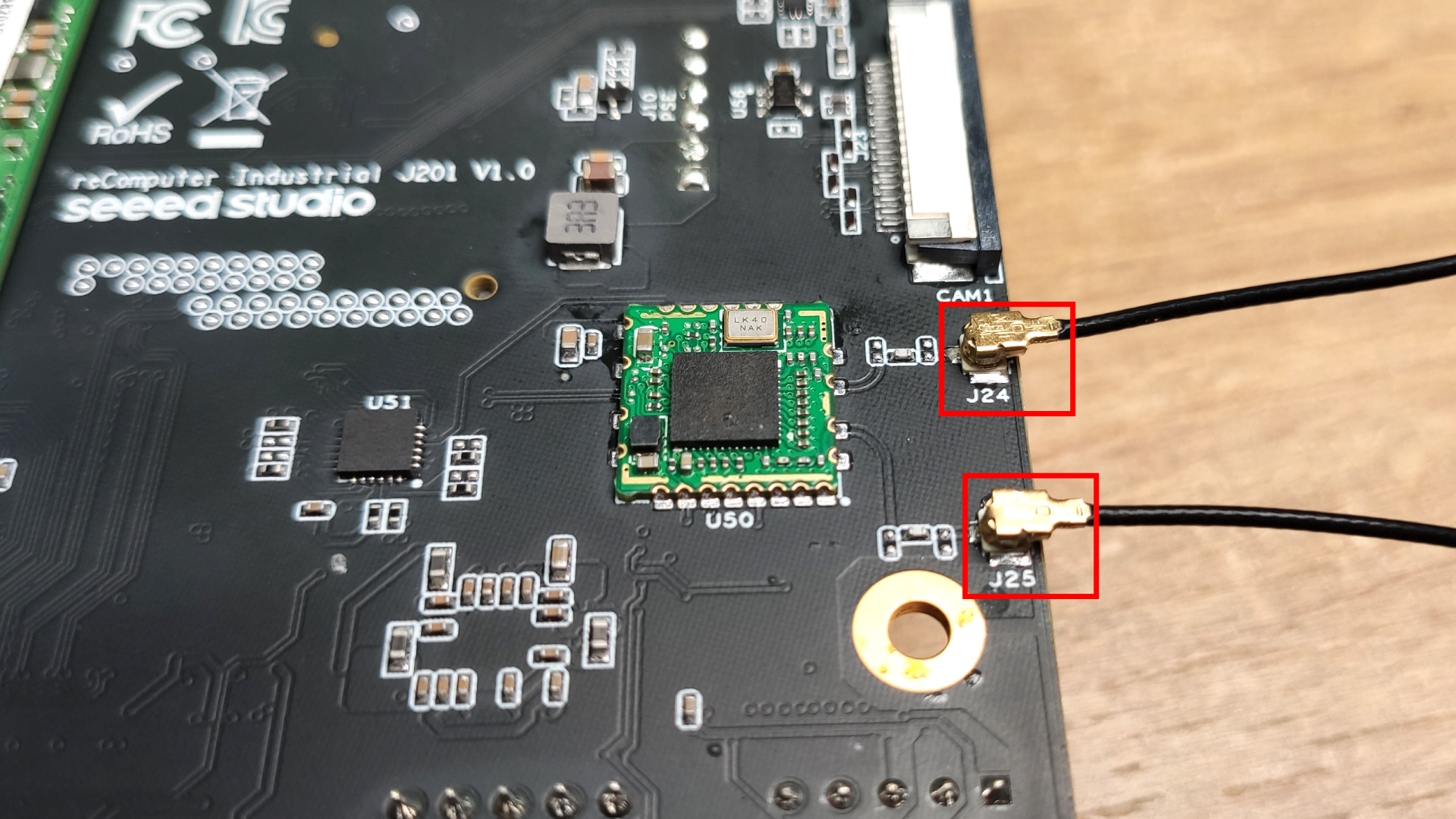
reComputer Industrial does not come with WiFi and Bluetooth out-of-the-box. But there is a reserved section on the PCB so that a WiFi/ Bluetooth module can be soldered to the board. Here we have reserved the space to support a BL-M8723DU1 module.
Connection Overview
- Step 1: If you want to solder the BL-M8723DU1 module by yourself, you can solder it. But we do not recommend this because if you damage the board in the process, the warranty will be void. What we recommend is to use our professional service to help you solder this module onto the board and you can send an email to [email protected] with your request.

- Step 2: Connect two antennas to the two antenna connectors on the board for WiFi and Bluetooth. Here you need to use an IPEX connector
Usage
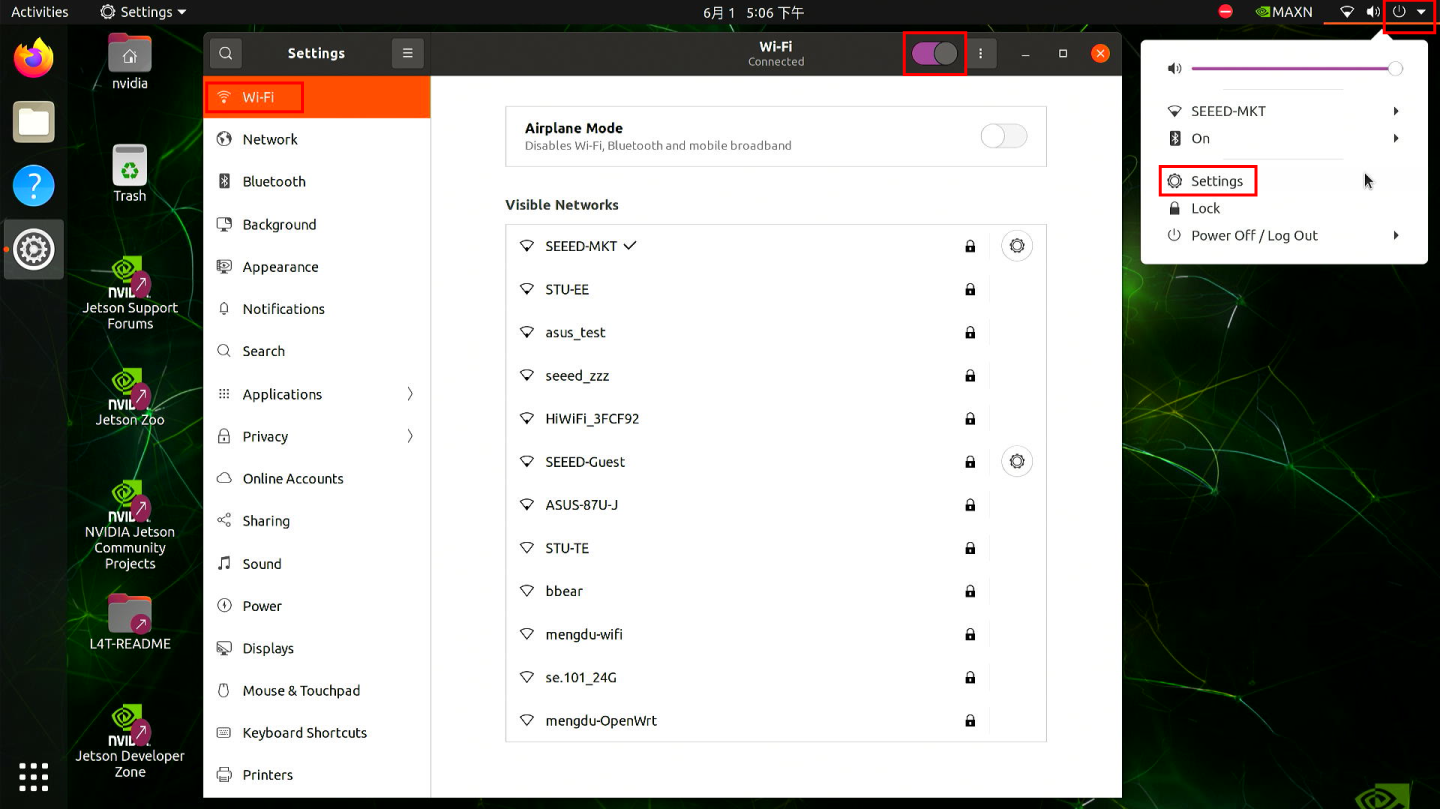
- Step 1: Turn on the board and once the device boots into Ubuntu Desktop, click on the drop-down menu at the top right corner, navigate to
Settings > Wi-Fiand toggle the button on the title bar to enable WiFi. After that select a WiFi network, enter the required password and connect to it
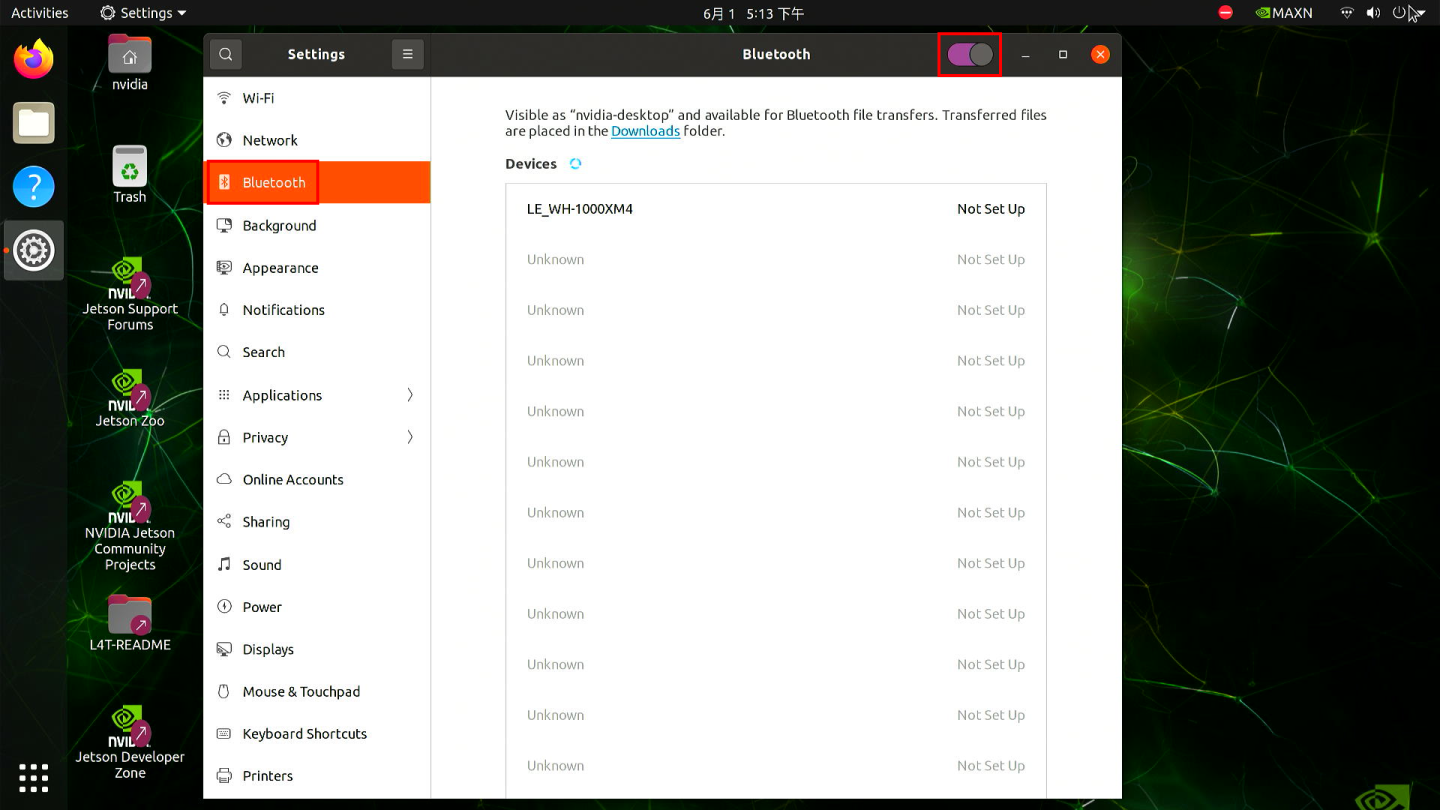
- Step 2: On the same window, choose Bluetooth and toggle the button on the title bar to enable Bluetooth. After that select a Bluetooth device to connect to it
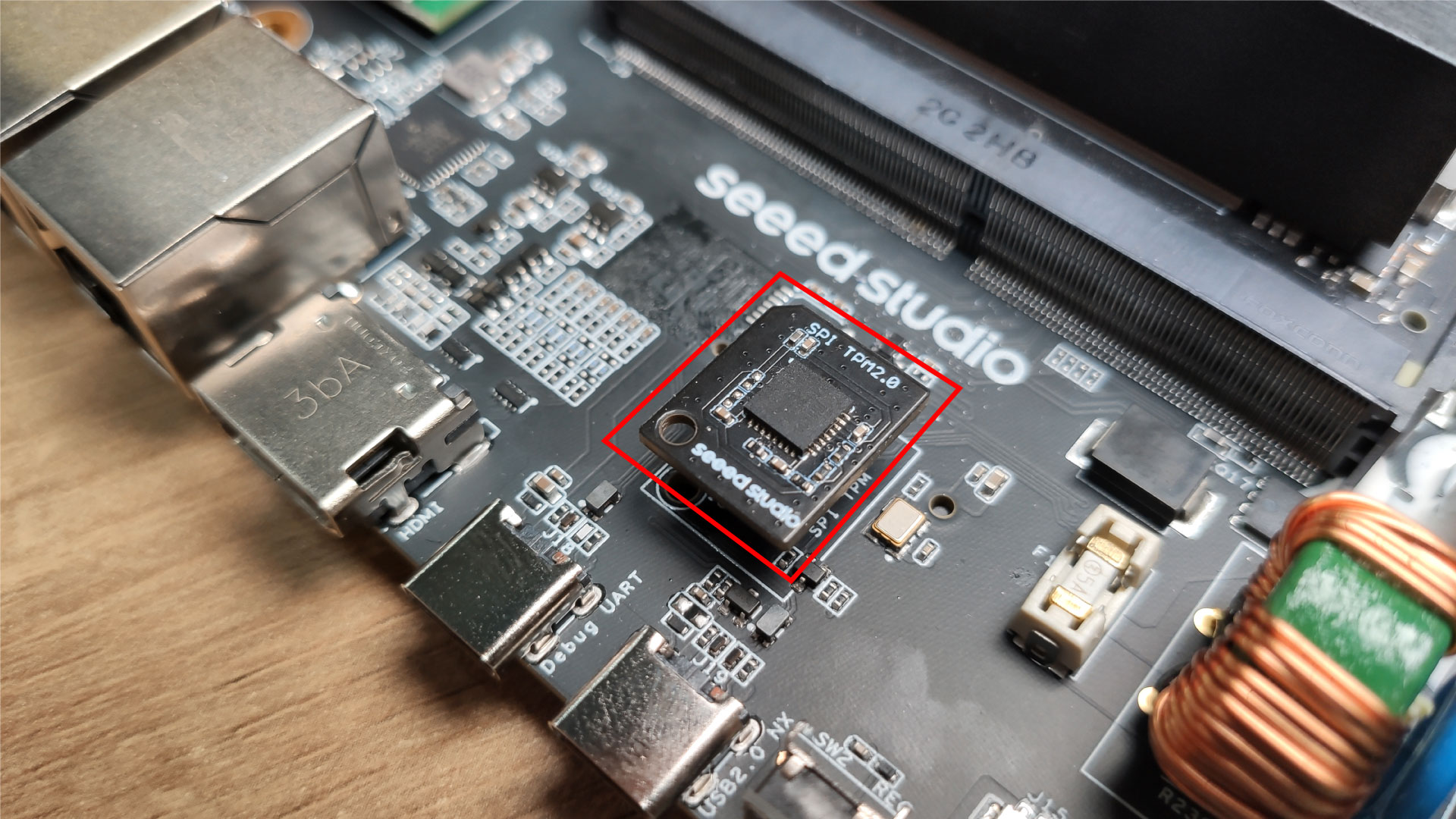
TPM
reComputer Industrial comes with a TPM interface to connect an external TPM module. Here we have tested with a Infineon SLB9670 based TPM2.0 Module.
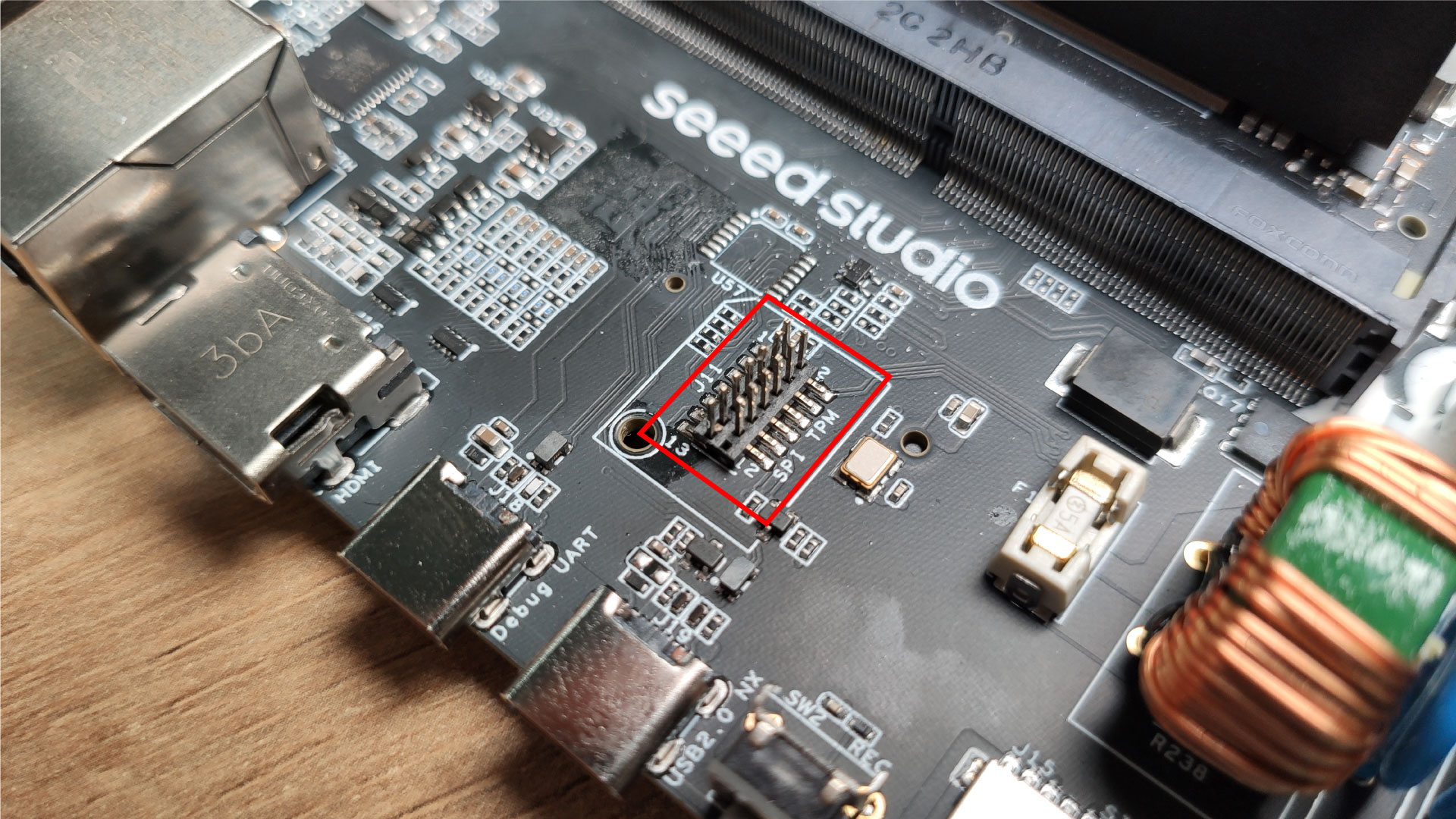
Connection Overview
Connect the TPM module to the TPM connector as shown below
Usage
Check whether the TPM module is loaded properly by executing the below commands
sudo dmesg | grep TPM
ls /dev/tpm* -l
And you will see the output as follows

Max Performance on reComputer Industrial
If you want to enable maximum performance on the reComputer Industrial, please follow the below instructions
- Step 1: Enter the below command to enable the maximum power mode
sudo nvpmodel -m 0
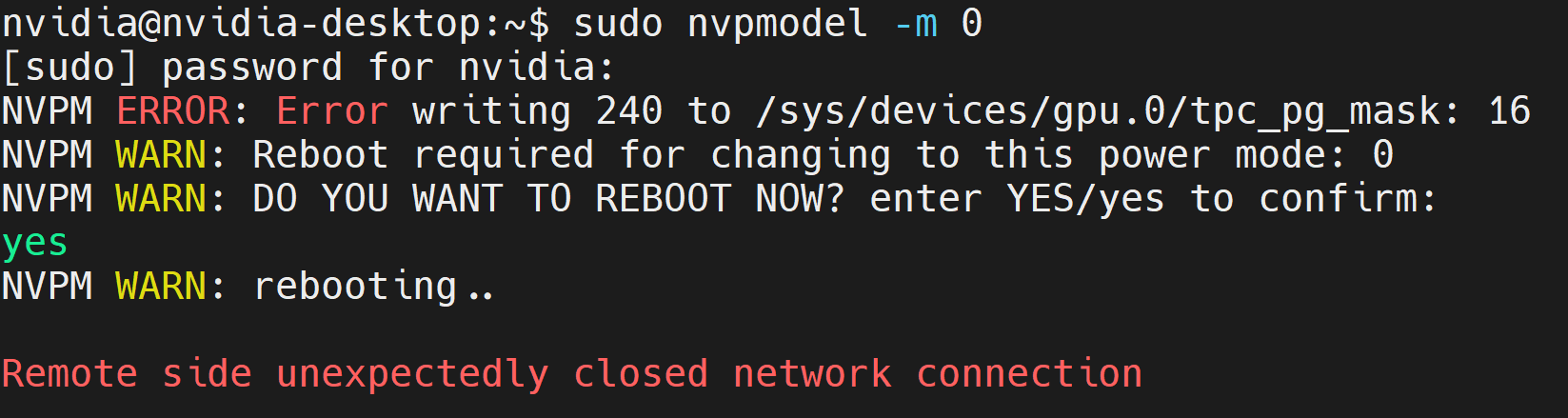
Here it will ask to type YES in order to reboot the board
- Step 2: Once the board is booted, enter the following command to set the CPU clocks to the maximum frequency
sudo jetson_clocks
GPIO Table
You can access the GPIO table of the reComputer Industrial to get familiar with all the pin mappings.
- Jetpack5
- Jetpack6
Execute the following inside a terminal to access it
sudo cat /sys/kernel/debug/gpio
And you will see the output as follows
gpiochip2: GPIOs 300-315, parent: i2c/1-0021, 1-0021, can sleep:
gpio-300 (wl_dis |gpio_xten_pin@0 ) out hi
gpio-301 (hst_wake_wl |gpio_xten_pin@1 ) out hi
gpio-302 (wl_wake_hst |gpio_xten_pin@2 ) out hi ACTIVE LOW
gpio-303 (bt_dis |gpio_xten_pin@3 ) out hi
gpio-304 (hst_wake_bt )
gpio-305 (bt_wake_hst )
gpio-306 (spi0_rst_3v3 |gpio_xten_pin@6 ) out lo ACTIVE LOW
gpio-307 (gpio_pin7 |gpio_xten_pin@7 ) out lo ACTIVE LOW
gpio-308 (can_120R_en )
gpio-309 (M2B_PCIe_rst )
gpio-310 (USB_HUB_rst |gpio_xten_pin@10 ) out hi
gpio-311 (PCIe_ETH_rst )
gpio-312 (M2B_WOWWAN )
gpio-313 (M2B_DPR_3V3 )
gpio-314 (SIM_MUX_SEL )
gpio-315 (gpio_pin15 )
gpiochip1: GPIOs 316-347, parent: platform/c2f0000.gpio, tegra234-gpio-aon:
gpio-316 (PAA.00 )
gpio-317 (PAA.01 )
gpio-318 (PAA.02 )
gpio-319 (PAA.03 )
gpio-320 (PAA.04 )
gpio-321 (PAA.05 |fixed-regulators:reg) out hi
gpio-322 (PAA.06 )
gpio-323 (PAA.07 )
gpio-324 (PBB.00 )
gpio-325 (PBB.01 )
gpio-326 (PBB.02 )
gpio-327 (PBB.03 )
gpio-328 (PCC.00 )
gpio-329 (PCC.01 )
gpio-330 (PCC.02 )
gpio-331 (PCC.03 |mux ) out hi
gpio-332 (PCC.04 )
gpio-333 (PCC.05 )
gpio-334 (PCC.06 )
gpio-335 (PCC.07 )
gpio-336 (PDD.00 )
gpio-337 (PDD.01 )
gpio-338 (PDD.02 )
gpio-339 (PEE.00 )
gpio-340 (PEE.01 )
gpio-341 (PEE.02 )
gpio-342 (PEE.03 )
gpio-343 (PEE.04 |power-key ) in hi IRQ ACTIVE LOW
gpio-344 (PEE.05 )
gpio-345 (PEE.06 )
gpio-346 (PEE.07 )
gpio-347 (PGG.00 )
gpiochip0: GPIOs 348-511, parent: platform/2200000.gpio, tegra234-gpio:
gpio-348 (PA.00 |fixed-regulators:reg) out lo
gpio-349 (PA.01 )
gpio-350 (PA.02 )
gpio-351 (PA.03 )
gpio-352 (PA.04 )
gpio-353 (PA.05 )
gpio-354 (PA.06 )
gpio-355 (PA.07 )
gpio-356 (PB.00 )
gpio-357 (PC.00 )
gpio-358 (PC.01 )
gpio-359 (PC.02 )
gpio-360 (PC.03 )
gpio-361 (PC.04 )
gpio-362 (PC.05 )
gpio-363 (PC.06 )
gpio-364 (PC.07 )
gpio-365 (PD.00 )
gpio-366 (PD.01 )
gpio-367 (PD.02 )
gpio-368 (PD.03 )
gpio-369 (PE.00 )
gpio-370 (PE.01 )
gpio-371 (PE.02 )
gpio-372 (PE.03 )
gpio-373 (PE.04 )
gpio-374 (PE.05 )
gpio-375 (PE.06 )
gpio-376 (PE.07 )
gpio-377 (PF.00 )
gpio-378 (PF.01 )
gpio-379 (PF.02 )
gpio-380 (PF.03 )
gpio-381 (PF.04 )
gpio-382 (PF.05 )
gpio-383 (PG.00 |force-recovery ) in hi IRQ ACTIVE LOW
gpio-384 (PG.01 )
gpio-385 (PG.02 )
gpio-386 (PG.03 )
gpio-387 (PG.04 )
gpio-388 (PG.05 )
gpio-389 (PG.06 )
gpio-390 (PG.07 |cd ) in lo IRQ
gpio-391 (PH.00 )
gpio-392 (PH.01 )
gpio-393 (PH.02 )
gpio-394 (PH.03 )
gpio-395 (PH.04 )
gpio-396 (PH.05 )
gpio-397 (PH.06 )
gpio-398 (PH.07 )
gpio-399 (PI.00 )
gpio-400 (PI.01 )
gpio-401 (PI.02 )
gpio-402 (PI.03 )
gpio-403 (PI.04 )
gpio-404 (PI.05 )
gpio-405 (PI.06 )
gpio-406 (PJ.00 )
gpio-407 (PJ.01 )
gpio-408 (PJ.02 )
gpio-409 (PJ.03 )
gpio-410 (PJ.04 )
gpio-411 (PJ.05 )
gpio-412 (PK.00 )
gpio-413 (PK.01 )
gpio-414 (PK.02 )
gpio-415 (PK.03 )
gpio-416 (PK.04 )
gpio-417 (PK.05 )
gpio-418 (PK.06 )
gpio-419 (PK.07 )
gpio-420 (PL.00 )
gpio-421 (PL.01 )
gpio-422 (PL.02 |nvidia,pex-wake ) in hi ACTIVE LOW
gpio-423 (PL.03 )
gpio-424 (PM.00 )
gpio-425 (PM.01 )
gpio-426 (PM.02 )
gpio-427 (PM.03 )
gpio-428 (PM.04 )
gpio-429 (PM.05 )
gpio-430 (PM.06 )
gpio-431 (PM.07 )
gpio-432 (PN.00 )
gpio-433 (PN.01 )
gpio-434 (PN.02 )
gpio-435 (PN.03 )
gpio-436 (PN.04 )
gpio-437 (PN.05 )
gpio-438 (PN.06 )
gpio-439 (PN.07 )
gpio-440 (PP.00 )
gpio-441 (PP.01 )
gpio-442 (PP.02 )
gpio-443 (PP.03 )
gpio-444 (PP.04 )
gpio-445 (PP.05 )
gpio-446 (PP.06 )
gpio-447 (PP.07 )
gpio-448 (PQ.00 )
gpio-449 (PQ.01 )
gpio-450 (PQ.02 )
gpio-451 (PQ.03 )
gpio-452 (PQ.04 )
gpio-453 (PQ.05 )
gpio-454 (PQ.06 )
gpio-455 (PQ.07 )
gpio-456 (PR.00 )
gpio-457 (PR.01 )
gpio-458 (PR.02 )
gpio-459 (PR.03 )
gpio-460 (PR.04 )
gpio-461 (PR.05 )
gpio-462 (PX.00 )
gpio-463 (PX.01 )
gpio-464 (PX.02 )
gpio-465 (PX.03 )
gpio-466 (PX.04 )
gpio-467 (PX.05 )
gpio-468 (PX.06 )
gpio-469 (PX.07 )
gpio-470 (PY.00 )
gpio-471 (PY.01 )
gpio-472 (PY.02 )
gpio-473 (PY.03 )
gpio-474 (PY.04 )
gpio-475 (PY.05 )
gpio-476 (PY.06 )
gpio-477 (PY.07 )
gpio-478 (PZ.00 )
gpio-479 (PZ.01 |vbus ) in hi IRQ ACTIVE LOW
gpio-480 (PZ.02 )
gpio-481 (PZ.03 )
gpio-482 (PZ.04 )
gpio-483 (PZ.05 )
gpio-484 (PZ.06 |cs_gpio ) out lo
gpio-485 (PZ.07 )
gpio-486 (PAC.00 )
gpio-487 (PAC.01 )
gpio-488 (PAC.02 )
gpio-489 (PAC.03 )
gpio-490 (PAC.04 )
gpio-491 (PAC.05 )
gpio-492 (PAC.06 )
gpio-493 (PAC.07 )
gpio-494 (PAD.00 )
gpio-495 (PAD.01 )
gpio-496 (PAD.02 )
gpio-497 (PAD.03 )
gpio-498 (PAE.00 )
gpio-499 (PAE.01 )
gpio-500 (PAF.00 )
gpio-501 (PAF.01 )
gpio-502 (PAF.02 )
gpio-503 (PAF.03 )
gpio-504 (PAG.00 )
gpio-505 (PAG.01 )
gpio-506 (PAG.02 )
gpio-507 (PAG.03 )
gpio-508 (PAG.04 )
gpio-509 (PAG.05 )
gpio-510 (PAG.06 )
gpio-511 (PAG.07 )
Execute the following inside a terminal to access it.
gpioinfo
And you will see the output as follows
seeed@seeed-desktop:~$ gpioinfo
gpiochip0 - 164 lines:
line 0: "PA.00" "regulator-vdd-3v3-sd" output active-high [used]
line 1: "PA.01" unused input active-high
line 2: "PA.02" unused input active-high
line 3: "PA.03" unused input active-high
line 4: "PA.04" unused input active-high
line 5: "PA.05" unused input active-high
line 6: "PA.06" unused input active-high
line 7: "PA.07" unused input active-high
line 8: "PB.00" unused input active-high
line 9: "PC.00" unused input active-high
line 10: "PC.01" unused input active-high
line 11: "PC.02" unused input active-high
line 12: "PC.03" unused input active-high
line 13: "PC.04" unused input active-high
line 14: "PC.05" unused input active-high
line 15: "PC.06" unused input active-high
line 16: "PC.07" unused input active-high
line 17: "PD.00" unused input active-high
line 18: "PD.01" unused input active-high
line 19: "PD.02" unused input active-high
line 20: "PD.03" unused input active-high
line 21: "PE.00" unused input active-high
line 22: "PE.01" unused input active-high
line 23: "PE.02" unused input active-high
line 24: "PE.03" unused input active-high
line 25: "PE.04" unused input active-high
line 26: "PE.05" unused input active-high
line 27: "PE.06" unused input active-high
line 28: "PE.07" unused input active-high
line 29: "PF.00" unused input active-high
line 30: "PF.01" unused input active-high
line 31: "PF.02" unused input active-high
line 32: "PF.03" unused input active-high
line 33: "PF.04" unused input active-high
line 34: "PF.05" unused input active-high
line 35: "PG.00" "Force Recovery" input active-low [used]
line 36: "PG.01" unused input active-high
line 37: "PG.02" "Suspend" input active-low [used]
line 38: "PG.03" unused input active-high
line 39: "PG.04" unused input active-high
line 40: "PG.05" unused input active-high
line 41: "PG.06" unused input active-high
line 42: "PG.07" unused input active-high
line 43: "PH.00" unused input active-high
line 44: "PH.01" unused input active-high
line 45: "PH.02" unused input active-high
line 46: "PH.03" "camera-control-output-low" output active-high [used]
line 47: "PH.04" unused input active-high
line 48: "PH.05" unused input active-high
line 49: "PH.06" unused output active-high
line 50: "PH.07" unused input active-high
line 51: "PI.00" unused output active-high
line 52: "PI.01" unused input active-high
line 53: "PI.02" unused input active-high
line 54: "PI.03" unused input active-high
line 55: "PI.04" unused input active-high
line 56: "PI.05" kernel input active-high [used]
line 57: "PI.06" unused input active-high
line 58: "PJ.00" unused input active-high
line 59: "PJ.01" unused input active-high
line 60: "PJ.02" unused input active-high
line 61: "PJ.03" unused input active-high
line 62: "PJ.04" unused input active-high
line 63: "PJ.05" unused input active-high
line 64: "PK.00" unused input active-high
line 65: "PK.01" unused input active-high
line 66: "PK.02" unused input active-high
line 67: "PK.03" unused input active-high
line 68: "PK.04" unused output active-high
line 69: "PK.05" unused output active-high
line 70: "PK.06" unused input active-high
line 71: "PK.07" unused input active-high
line 72: "PL.00" unused input active-high
line 73: "PL.01" unused input active-high
line 74: "PL.02" unused input active-high
line 75: "PL.03" unused input active-high
line 76: "PM.00" kernel input active-high [used]
line 77: "PM.01" unused input active-high
line 78: "PM.02" unused input active-high
line 79: "PM.03" unused input active-high
line 80: "PM.04" unused input active-high
line 81: "PM.05" unused input active-high
line 82: "PM.06" unused input active-high
line 83: "PM.07" unused input active-high
line 84: "PN.00" unused input active-high
line 85: "PN.01" "interrupt" input active-high [used]
line 86: "PN.02" unused input active-high
line 87: "PN.03" unused input active-high
line 88: "PN.04" unused input active-high
line 89: "PN.05" unused input active-high
line 90: "PN.06" unused input active-high
line 91: "PN.07" unused input active-high
line 92: "PP.00" unused input active-high
line 93: "PP.01" unused input active-high
line 94: "PP.02" unused input active-high
line 95: "PP.03" unused input active-high
line 96: "PP.04" unused input active-high
line 97: "PP.05" unused input active-high
line 98: "PP.06" unused input active-high
line 99: "PP.07" unused input active-high
line 100: "PQ.00" unused input active-high
line 101: "PQ.01" unused input active-high
line 102: "PQ.02" unused input active-high
line 103: "PQ.03" unused output active-high
line 104: "PQ.04" unused input active-high
line 105: "PQ.05" unused input active-high
line 106: "PQ.06" unused input active-high
line 107: "PQ.07" unused input active-high
line 108: "PR.00" unused input active-high
line 109: "PR.01" unused input active-high
line 110: "PR.02" unused input active-high
line 111: "PR.03" unused input active-high
line 112: "PR.04" unused input active-high
line 113: "PR.05" unused input active-high
line 114: "PX.00" kernel input active-high [used]
line 115: "PX.01" kernel input active-high [used]
line 116: "PX.02" unused input active-high
line 117: "PX.03" unused input active-high
line 118: "PX.04" unused input active-high
line 119: "PX.05" unused input active-high
line 120: "PX.06" unused input active-high
line 121: "PX.07" unused input active-high
line 122: "PY.00" unused input active-high
line 123: "PY.01" unused input active-high
line 124: "PY.02" unused input active-high
line 125: "PY.03" unused input active-high
line 126: "PY.04" unused input active-high
line 127: "PY.05" unused input active-high
line 128: "PY.06" unused input active-high
line 129: "PY.07" unused input active-high
line 130: "PZ.00" unused input active-high
line 131: "PZ.01" "vbus" input active-low [used]
line 132: "PZ.02" unused input active-high
line 133: "PZ.03" unused input active-high
line 134: "PZ.04" unused input active-high
line 135: "PZ.05" unused input active-high
line 136: "PZ.06" "spi0 CS0" output active-low [used]
line 137: "PZ.07" unused input active-high
line 138: "PAC.00" unused output active-high
line 139: "PAC.01" unused input active-high
line 140: "PAC.02" unused input active-high
line 141: "PAC.03" unused input active-high
line 142: "PAC.04" unused input active-high
line 143: "PAC.05" unused input active-high
line 144: "PAC.06" unused input active-high
line 145: "PAC.07" unused input active-high
line 146: "PAD.00" unused input active-high
line 147: "PAD.01" unused input active-high
line 148: "PAD.02" unused input active-high
line 149: "PAD.03" unused input active-high
line 150: "PAE.00" unused input active-high
line 151: "PAE.01" unused input active-high
line 152: "PAF.00" unused input active-high
line 153: "PAF.01" unused input active-high
line 154: "PAF.02" unused input active-high
line 155: "PAF.03" unused input active-high
line 156: "PAG.00" unused input active-high
line 157: "PAG.01" unused input active-high
line 158: "PAG.02" unused input active-high
line 159: "PAG.03" unused input active-high
line 160: "PAG.04" unused input active-high
line 161: "PAG.05" unused input active-high
line 162: "PAG.06" unused input active-high
line 163: "PAG.07" unused input active-high
gpiochip1 - 32 lines:
line 0: "PAA.00" unused input active-high
line 1: "PAA.01" unused input active-high
line 2: "PAA.02" unused input active-high
line 3: "PAA.03" unused input active-high
line 4: "PAA.04" unused output active-high
line 5: "PAA.05" "regulator-vdd-3v3-pcie" output active-high [used]
line 6: "PAA.06" unused input active-high
line 7: "PAA.07" unused input active-high
line 8: "PBB.00" unused input active-high
line 9: "PBB.01" unused input active-high
line 10: "PBB.02" unused input active-high
line 11: "PBB.03" unused output active-high
line 12: "PCC.00" unused output active-high
line 13: "PCC.01" unused output active-high
line 14: "PCC.02" unused output active-high
line 15: "PCC.03" "mux" output active-high [used]
line 16: "PCC.04" unused input active-high
line 17: "PCC.05" unused input active-high
line 18: "PCC.06" unused input active-high
line 19: "PCC.07" unused input active-high
line 20: "PDD.00" unused input active-high
line 21: "PDD.01" unused input active-high
line 22: "PDD.02" unused input active-high
line 23: "PEE.00" unused input active-high
line 24: "PEE.01" unused input active-high
line 25: "PEE.02" unused input active-high
line 26: "PEE.03" unused input active-high
line 27: "PEE.04" "Power" input active-low [used]
line 28: "PEE.05" unused input active-high
line 29: "PEE.06" unused input active-high
line 30: "PEE.07" unused input active-high
line 31: "PGG.00" unused input active-high
gpiochip2 - 16 lines:
line 0: "wl_dis" "gpio_xten_pin@0" output active-high [used]
line 1: "hst_wake_wl" "gpio_xten_pin@1" output active-high [used]
line 2: "wl_wake_hst" "gpio_xten_pin@2" output active-low [used]
line 3: "bt_dis" "gpio_xten_pin@3" output active-high [used]
line 4: "hst_wake_bt" unused input active-high
line 5: "bt_wake_hst" unused input active-high
line 6: "spi0_rst_3v3" "gpio_xten_pin@6" output active-low [used]
line 7: "gpio_pin7" "gpio_xten_pin@7" output active-low [used]
line 8: "can_120R_en" unused input active-high
line 9: "M2B_PCIe_rst" unused input active-high
line 10: "USB_HUB_rst" "gpio_xten_pin@10" output active-high [used]
line 11: "PCIe_ETH_rst" unused input active-high
line 12: "M2B_WOWWAN" unused input active-high
line 13: "M2B_DPR_3V3" unused input active-high
line 14: "SIM_MUX_SEL" unused input active-high
line 15: "gpio_pin15" unused input active-high
Resources
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.