ReachyMini Getting Started
The Reachy Mini is the first open-source desktop robot designed to explore human-robot interaction and creative custom applications. Developed collaboratively by Pollen Robotics and Hugging Face, this compact humanoid robot brings professional-grade robotics capabilities to your desk at an affordable price point.
Optimized and manufactured by Seeed Studio, Reachy Mini combines expressive physical interaction with modern AI capabilities. Whether you're building voice assistants, computer vision applications, or educational tools, Reachy Mini provides a complete platform for real-world AI experimentation.
- The key features and architecture of Reachy Mini
- Hardware specifications and differences between Lite and Full versions
- How to assemble and configure your Reachy Mini
- How to control the robot using the Python SDK
- How to integrate with Hugging Face models and applications
- Where to find community resources and support
Key Features & Specifications
Reachy Mini packs impressive capabilities into a compact, desktop-sized package.
| Feature | Reachy Mini Lite | Reachy Mini (Full) |
|---|---|---|
| Price | $299 + shipping | $449 + shipping |
| Compute | External (Mac/Linux compatible) | Raspberry Pi 4 onboard |
| Connectivity | Wired only | WiFi + Ethernet (via USB-C adapter) |
| Power | Wired power | Battery + wired operation |
| Microphones | 4 | 4 |
| Speaker | 5W | 5W |
| Camera | Wide-angle | Wide-angle |
| Accelerometer | No | Yes |
| Head Movement | 6-DOF | 6-DOF |
| Body Rotation | Yes | Yes |
| Animated Antennas | 2 | 2 |
| Height | 28 cm (11") | 28 cm (11") |
| Weight | 1.5 kg (3.3 lbs) | 1.5 kg (3.3 lbs) |
Physical Dimensions
- Height: 28 cm / 11 inches (approximately 23 cm / 9 inches in sleep mode)
- Width: 16 cm / 6.3 inches
- Weight: 1.5 kg / 3.3 lbs
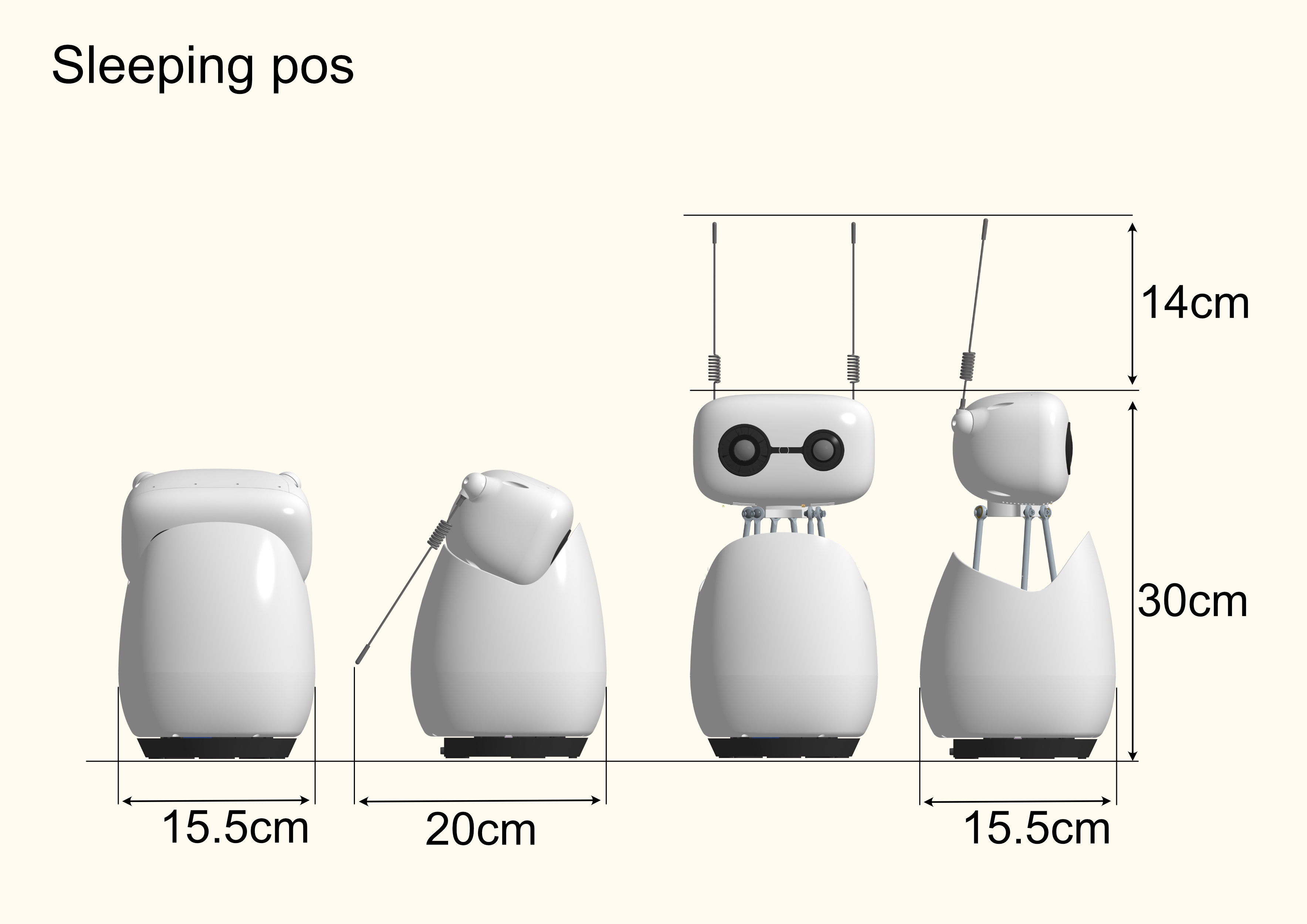
Physical Dimensions
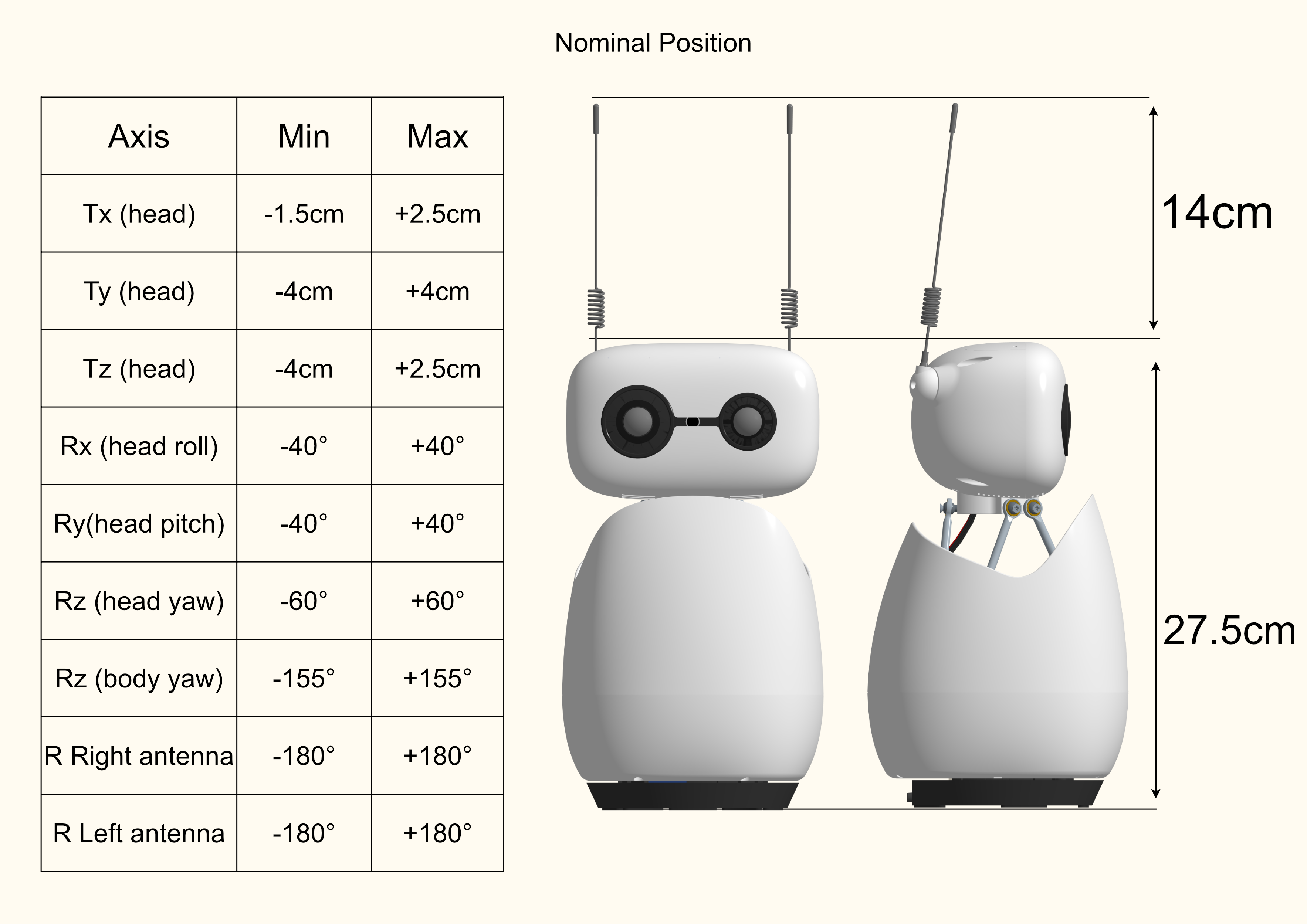
DOF Specifications
Motion Range
Designed for Human-Robot Interaction
Reachy Mini is specifically engineered for expressive, engaging human-robot interaction:
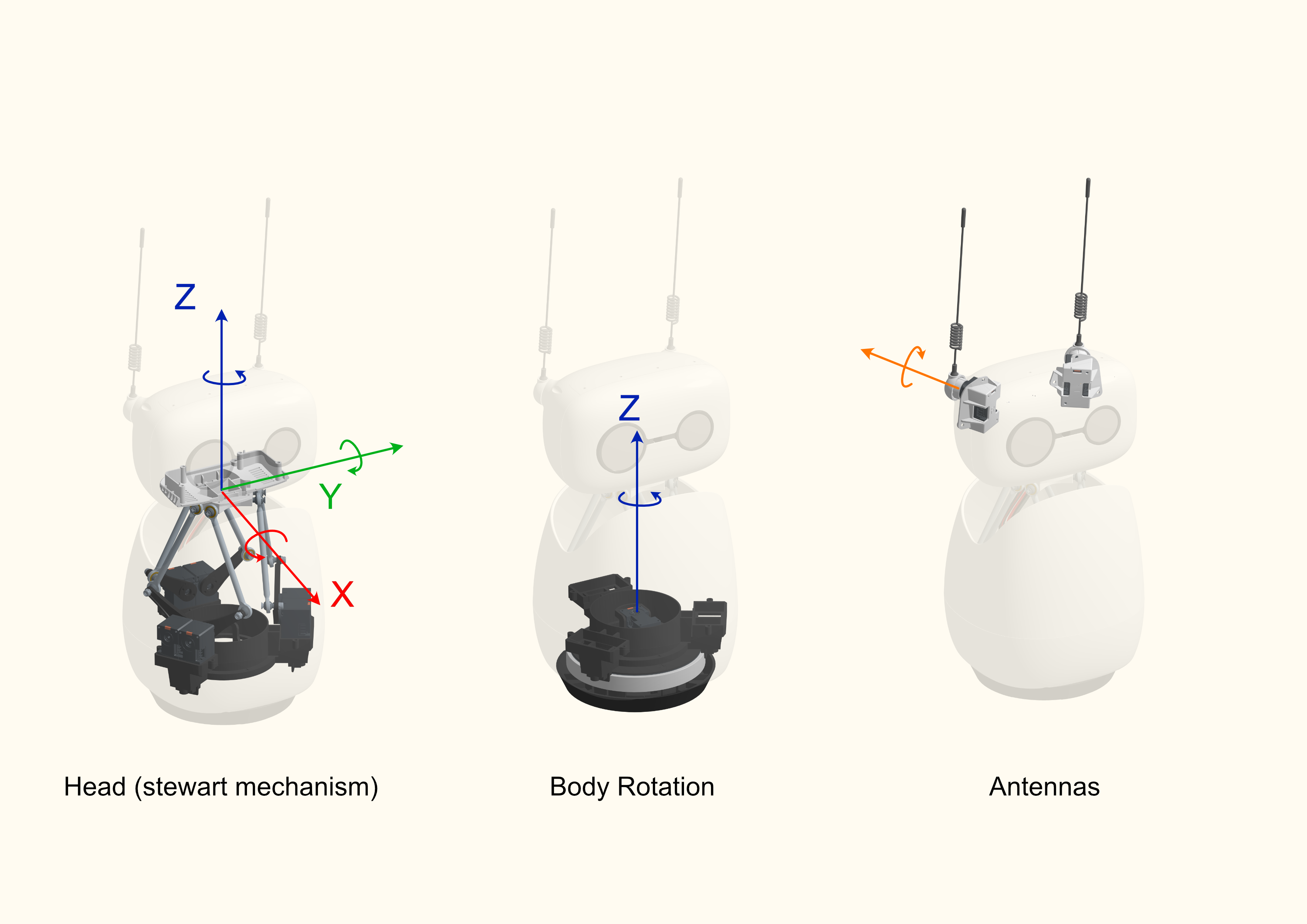
Expressive Movement
- 6 Degrees of Freedom Head: Natural-looking pan, tilt, and roll movements
- Full Body Rotation: 360-degree rotation for dynamic positioning
- Animated Antennas: Two expressive antennas that add personality and feedback
Multimodal Sensing
- 4-Microphone Array: Advanced audio capture for voice recognition and sound localization
- Wide-Angle Camera: Computer vision capabilities for face detection, object recognition, and more
- 5W Speaker: Clear audio output for speech synthesis and sound effects
Open & Extensible
- Fully Open-Source: Hardware design, software SDK, and simulation environment
- Python SDK: Intuitive programming interface with JavaScript and Scratch support coming soon
- Hugging Face Integration: Direct access to state-of-the-art AI models for speech, vision, and more
Hardware Versions
Reachy Mini Lite ($299)
The Lite version is ideal for developers who prefer external compute or already have a preferred development environment.
Best for:
- Developers with Mac/Linux systems
- Users who want maximum control over compute resources
- Educational settings with existing computer labs
- Projects requiring integration with existing infrastructure
Limitations:
- Requires wired connection to host computer
- No WiFi capability
- No accelerometer
- Must be powered via wall outlet
Reachy Mini Full ($449)
The Full version includes onboard computing for complete autonomy and wireless operation.
Best for:
- Standalone robot applications
- Wireless research and development
- Projects requiring accelerometer data
- Portable demonstrations and deployments
Additional Features:
- Raspberry Pi 4 onboard computer
- WiFi connectivity
- Battery for wireless operation
- Built-in accelerometer
Assembly Guide
Reachy Mini is sold as a kit that takes approximately 2-3 hours to assemble. The assembly process is designed to be approachable for builders of all experience levels.
Assembly Resources
- Interactive Assembly Guide: Step-by-step online instructions
- Set aside 2-3 hours in a clean, well-lit workspace
- A set of small screwdrivers is required (included in kit)
- Follow the online guide step-by-step for best results
- Test each subsystem as you assemble (camera, microphones, servos)
Getting Started with Software
Prerequisites
Depending on your version, you'll need:
Reachy Mini Lite:
- Mac or Linux computer (Windows support coming soon)
- Python 3.8 or higher
- USB connection
Reachy Mini Full:
- WiFi network or Ethernet connection
- Web browser for dashboard access
Quick Start Installation
Install the Reachy Mini SDK with the following command:
pip install reachy-mini
Pro tip: Install uv for 10-100x faster app installations (auto-detected, falls back to
pip).
Hello World Example
Control your robot in just a few lines of code:
from reachy_mini import ReachyMini
from reachy_mini.utils import create_head_pose
with ReachyMini() as mini:
# Look up and tilt head
mini.goto_target(
head=create_head_pose(z=10, roll=15, degrees=True, mm=True),
duration=1.0
)
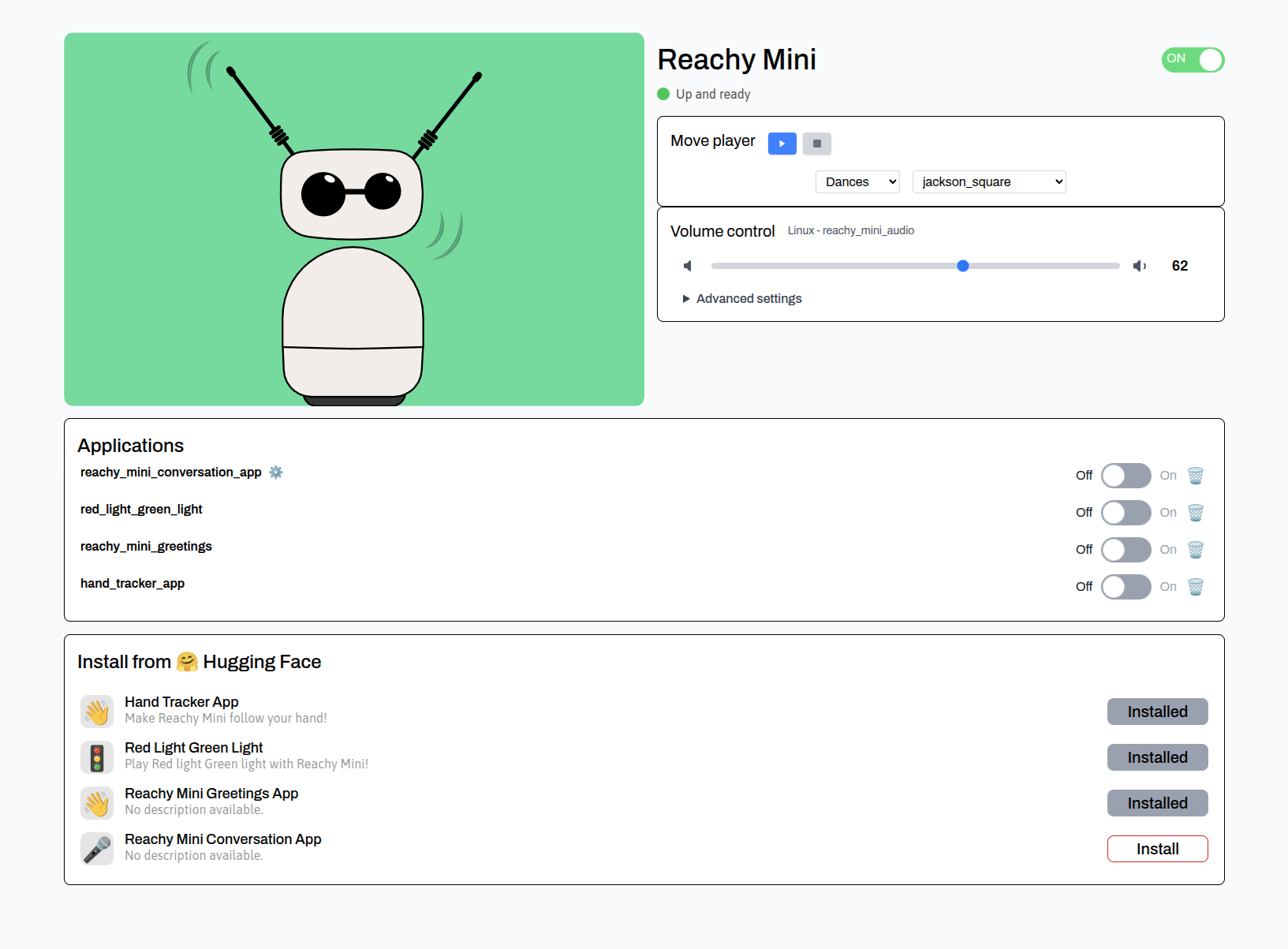
Dashboard Control
A web-based dashboard provides an intuitive interface for testing and controlling Reachy Mini without writing code.
Features:
- Real-time motor control
- Camera feed display
- Microphone testing
- App management
- System diagnostics
Download the dashboard from the official repository or access it directly from your Reachy Mini Full's local network.
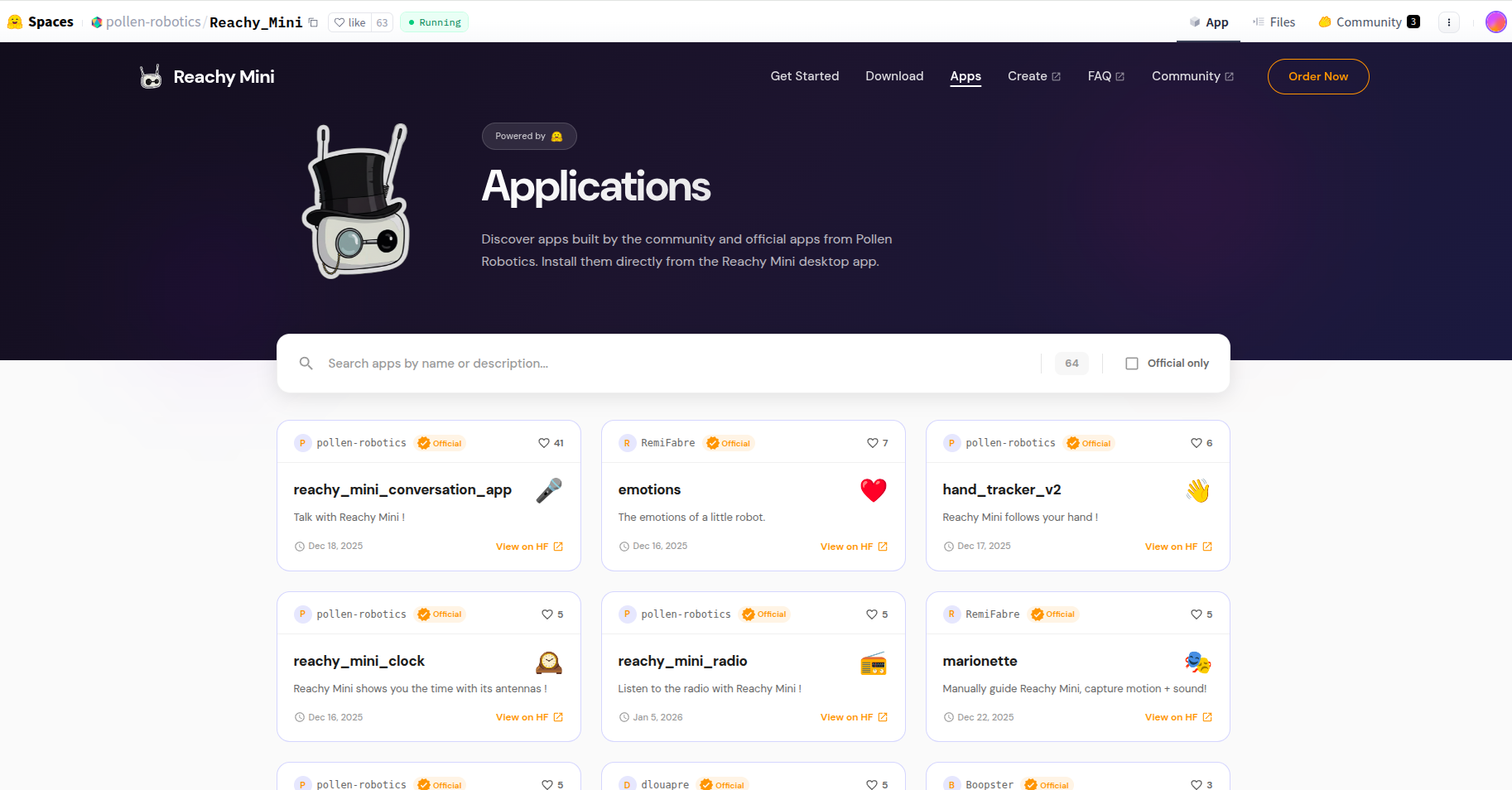
Hugging Face Apps Ecosystem
Reachy Mini features a growing ecosystem of ready-to-use applications powered by Hugging Face Spaces. Install these apps directly from your robot's dashboard with one click.
Featured Apps
Conversation App
- Natural language interaction powered by Large Language Models
- Voice recognition and speech synthesis
- Customizable personality and knowledge base
Hand Tracker
- Real-time hand tracking using computer vision
- The robot follows your hand movements
- Great for demonstrations and interaction experiments
Radio
- Voice-controlled radio streaming
- Natural language requests for songs and stations
- Demonstrates audio processing capabilities
And Many More: Browse the complete app collection on Hugging Face Spaces
Building Custom Applications
Python SDK
The Python SDK provides comprehensive control over all Reachy Mini systems:
from reachy_mini import ReachyMini
with ReachyMini() as mini:
# Motor control
mini.goto_target(head=pose, duration=1.0)
# Camera access
frame = mini.camera.get_frame()
# Audio I/O
mini.speaker.play_audio(audio_data)
audio = mini.microphones.record(duration=5.0)
# Accelerometer (Full version only)
orientation = mini.imu.get_orientation()
AI Integration
Reachy Mini seamlessly integrates with Hugging Face's extensive model ecosystem:
- Speech Recognition: Whisper, Wav2Vec2
- Speech Synthesis: Bark, SpeechT5
- Vision: ViT, CLIP, YOLO
- Language: LLaMA, Mistral, GPT models
- Multimodal: GPT-4V, LLaVA
Publishing Apps
Share your creations with the global Reachy Mini community:
- Build your app using the SDK
- Create a Hugging Face Space
- Add the
reachy-minitag - Publish and share with millions of Hugging Face users
Simulation Development
Prototype and develop Reachy Mini applications without hardware using the MuJoCo simulation environment:
pip install reachy-mini[simulation]
Test your code, iterate quickly, and deploy to hardware when ready.
Technical Specifications Deep Dive
Motor System
- Degrees of Freedom: 6-DOF head movement
- Control: High-precision servo motors
- Safety: Current limiting and position feedback
- Smooth Motion: Interpolated trajectories for natural movement
Audio System
- Microphone Array: 4 microphones arranged for optimal sound localization
- Beamforming: Hardware-level audio processing
- SNR: High signal-to-noise ratio for clear voice capture
- Speaker: 5W output with clear frequency response
Vision System
- Sensor: Wide-angle camera
- Resolution: HD video capture
- FPS: 30 frames per second
- Field of View: Optimized for desktop interaction
Power Requirements
Lite Version:
- Powered via USB from host computer or wall adapter
- Typical consumption: 5V @ 2A
Full Version:
- Internal battery for wireless operation
- USB-C charging
- Battery life: 2-4 hours depending on usage
Privacy & Security
Reachy Mini is designed with privacy in mind:
- No Data Collection: The robot does not store, transmit, or process personal data by default
- Local Processing: All AI processing can be done locally
- User Control: Camera and microphone functions are fully under user control
- Open Source: Full transparency in software and hardware
Reachy Mini does not send any data to Pollen Robotics or Hugging Face. All processing happens locally unless you explicitly configure cloud services.
Community & Support
Join the Community
- Discord: Join the Reachy Mini Discord
- GitHub: Report issues and contribute
- Official Website: https://www.pollen-robotics.com/reachy-mini/
Documentation & Learning Resources
- Official Development Guide: Complete official documentation and development resources
- SDK Installation: 5 minutes to set up your computer
- Quickstart Guide: Run your first behavior on Reachy Mini
- Python SDK: Learn to move, see, speak, and hear
- AI Integrations: Connect LLMs, build Apps, and publish to Hugging Face
- Core Concepts: Architecture, coordinate systems, and safety limits
- Secondary Development: Seeed's starter guide for custom application development
- Assembly Guide: Step-by-step assembly instructions
- 🤗Share your app with the community
What's Next?
Roadmap
The Reachy Mini platform is continuously evolving:
- JavaScript Support: Coming soon for web-based development
- Scratch Integration: Block-based programming for beginners
- Additional Apps: Growing ecosystem of community applications
- Hardware Expansions: Modular accessories and upgrades
- Enhanced AI Models: Optimized models for onboard processing
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.