Implement Ethercat Communication on reComputer

EtherCAT (Ethernet for Control Automation Technology) is a high-performance, open-source industrial Ethernet protocol designed for real-time automation control in automation, robotics, and motion systems. This wiki will show you how to conduct EtherCat communication on the reComputer Jetson Series.
Prerequisites
- reComputer(preinstalled Jetpack 6.2)
- Ethernet cable
- EtherCAT Slave Device
Real-time Performance Verification
Before implementing EtherCAT communication, it's crucial to verify that your reComputer system meets real-time performance requirements for industrial automation.
Install Real-time Testing Tools
# Install rt-tests package for real-time latency measurement
sudo apt update
sudo apt install rt-tests -y
Run Cyclictest
# Run cyclictest with 6 threads and priority 80
sudo cyclictest -t 6 -p 80
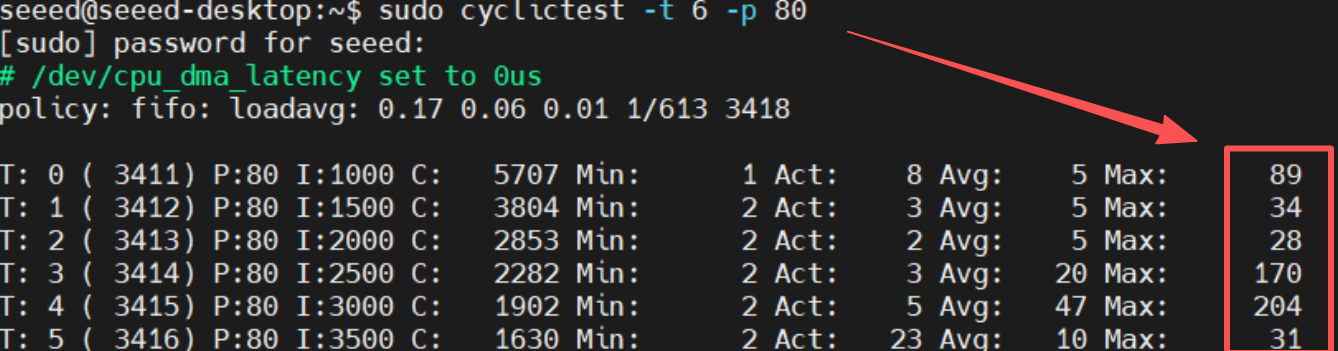
Before enable the jetson_clocks,you can observe that the latency of some threads is relatively high.So,we need to enable the jetson_clocks by fllowing command:
sudo jetson_clocks
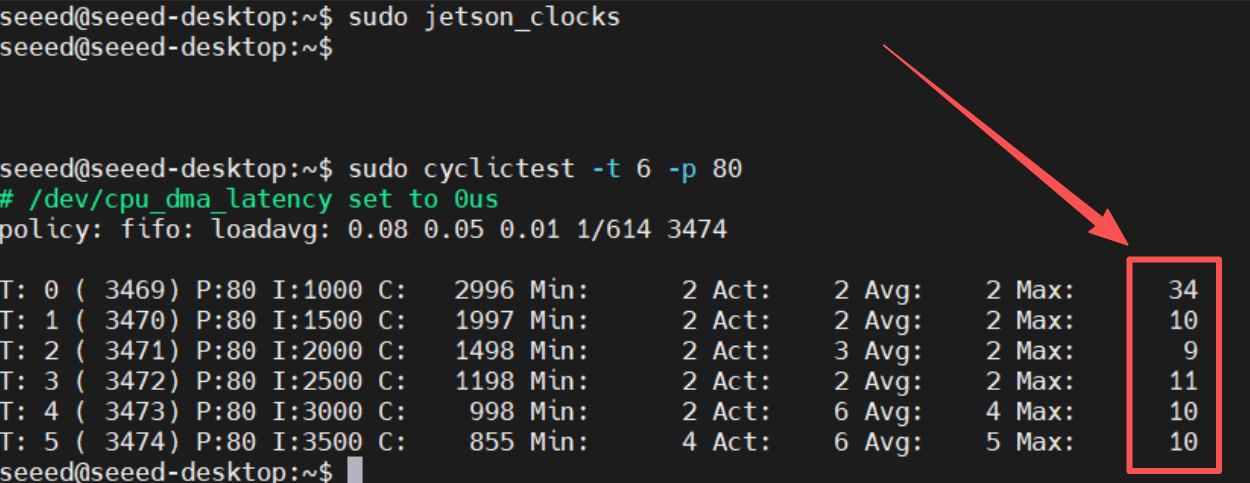
Real-time Performance Analysis:
- Maximum latency: 34 microseconds
- Average latency: 2-6 microseconds
- All 6 test threads show stable latency within 9-34 microseconds range
- System load: 0.00
- Latency distribution is uniform and consistent
This performance meets the hard real-time application requirement of under 100 microseconds, making it suitable for robotics control and industrial automation applications.
SOEM Library Overview
SOEM (Simple Open EtherCAT Master) is a lightweight, open-source EtherCAT master library that provides developers with a portable and flexible way to establish real-time EtherCAT communication. While NVIDIA Jetson doesn't have native EtherCAT hardware interface, SOEM enables EtherCAT communication entirely in software using raw Ethernet frames through standard network interfaces.
Key Features
- Software-based implementation - No special hardware required
- Real-time capable - Optimized for low-latency communication
- Cross-platform - Works on Linux, Windows, and embedded systems
- Open source - Free to use and modify
- Multiple slave support - Can control numerous EtherCAT devices
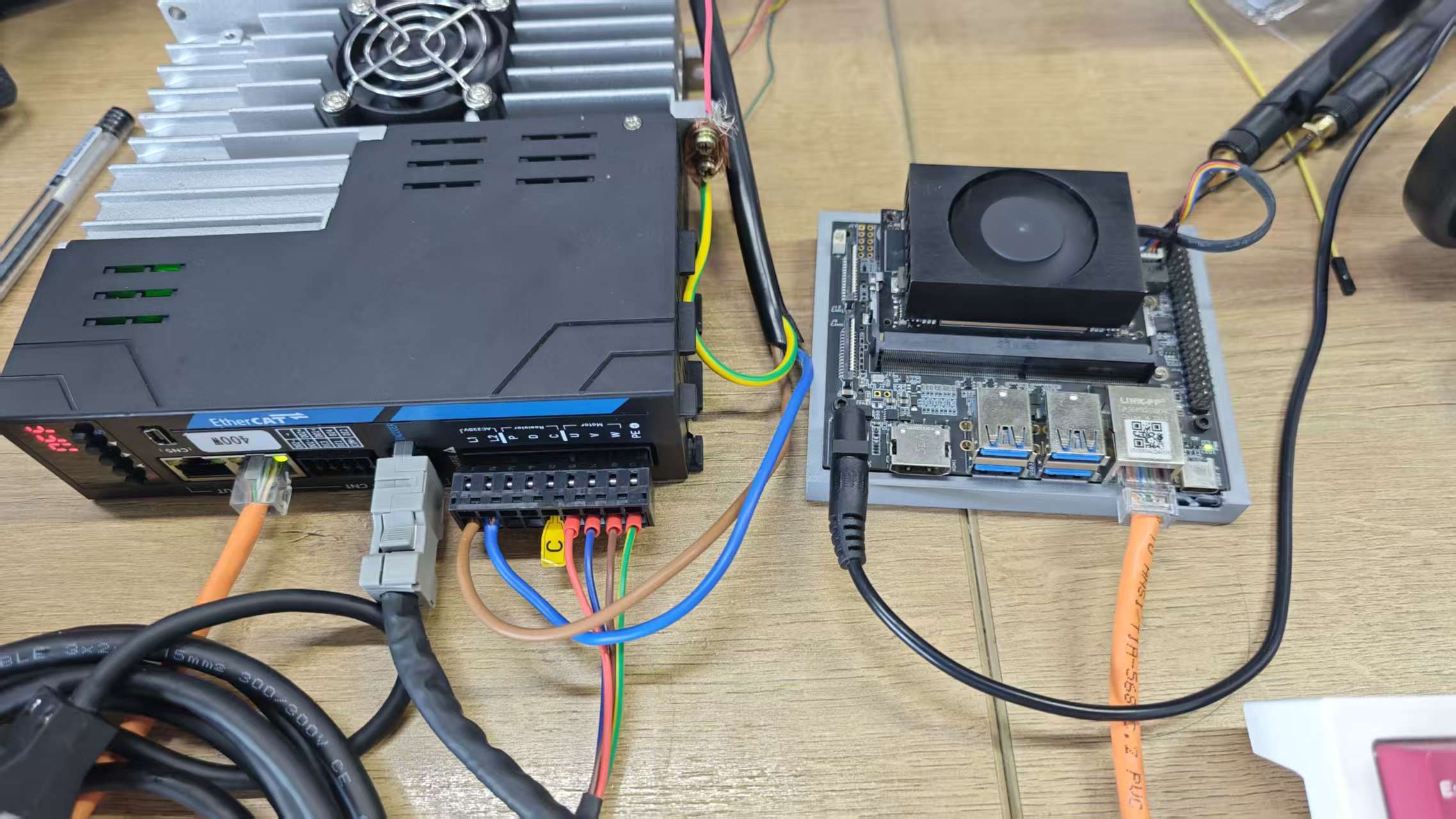
Hardware Connection
Connect your EtherCAT network using the following setup:
- Use a standard Ethernet cable (Cat5e or higher recommended)
- Connect reComputer (Master) to EtherCAT Slave Device
Installing SOEM Library
Step 1. Clone SOEM Repository
# Clone the SOEM library from GitHub
git clone https://github.com/OpenEtherCATsociety/SOEM
cd SOEM
Step 2. Build and Install
# Create build directory
mkdir build
cd build
# Configure with CMake
cmake ..
# Compile with 4 parallel jobs
make -j4
# Install system-wide
sudo make install
Testing EtherCAT Communication
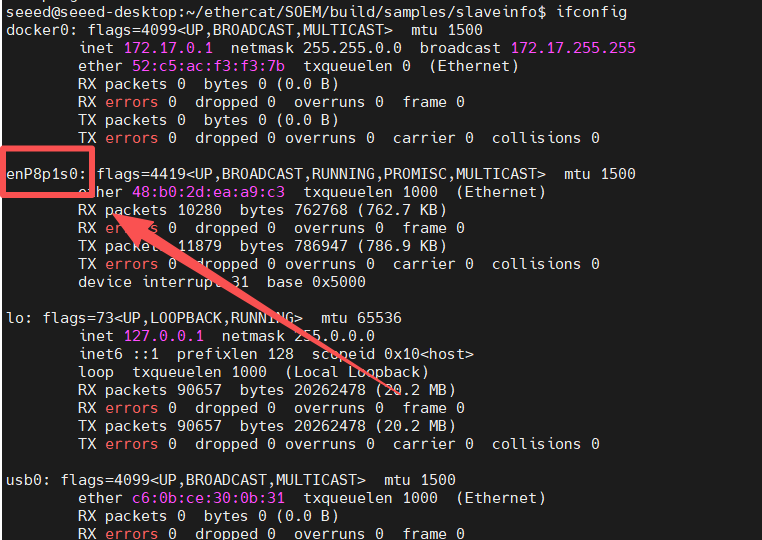
Step 1. Identify Network Interface:
# Check available network interfaces
ifconfig
Step 2. Navigate to the slaveinfo sample and run the detection program:
# Navigate to slaveinfo sample
cd /path/to/SOEM/build/samples/slaveinfo
# Run slave detection (replace enP8p1s0 with your interface name)
sudo ./slaveinfo enP8p1s0
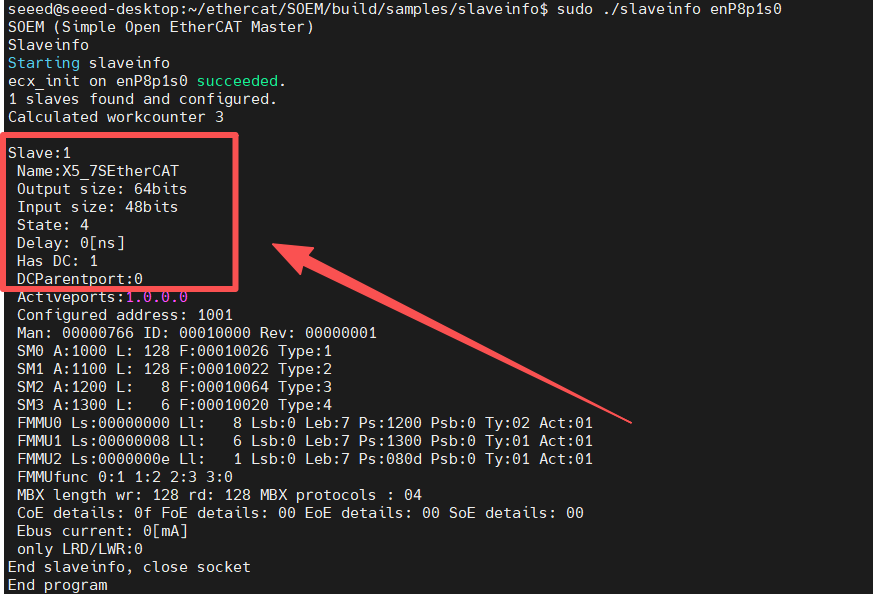
Verification Success: If you see "slave found" in the output, it confirms that:
- SOEM software stack is working correctly
- EtherCAT slave device is properly connected
- Communication link is established
Basic Communication Examples
C Example
Create a simple C program to demonstrate basic EtherCAT communication:
ethercat_communication_test.c
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <stdint.h>
#include <sys/time.h>
// EtherCAT includes
# include "ethercat.h"
// Function prototypes
void print_state_info(const char* state_name, int success);
void set_control_mode(int mode);
void read_control_mode(void);
void set_servo_parameters(void);
void configure_pdo_mapping(void);
void sleep_ms(int milliseconds);
int main(int argc, char *argv[])
{
int ret;
char*ifname = "enP8p1s0"; // Network interface name
printf("EtherCAT Communication Test - C Version\n");
printf("=======================================\n\n");
// Initialize EtherCAT communication
printf("Initializing EtherCAT communication...\n");
// Initialize EtherCAT master
if (ec_init(ifname)) {
printf("✅ EtherCAT master initialized successfully\n");
} else {
printf("❌ Failed to initialize EtherCAT master\n");
return -1;
}
// Find and configure slaves
if (ec_config_init(FALSE) > 0) {
printf("✅ Found %d slaves\n", ec_slavecount);
} else {
printf("❌ No slaves found\n");
ec_close();
return -1;
}
// Print slave information
printf("Found slave: %s, state: %d\n",
ec_slave[1].name, ec_slave[1].state);
// Enter PRE-OP state (SDO communication allowed)
printf("\n📡 Entering PRE-OP state (SDO communication allowed)...\n");
ec_statecheck(0, EC_STATE_PRE_OP, EC_TIMEOUTSTATE);
ret = ec_writestate(0);
if (ret == EK_OK) {
print_state_info("PRE-OP", 1);
} else {
print_state_info("PRE-OP", 0);
}
// Enter SAFE-OP state (safe PDO communication allowed)
printf("\n📡 Entering SAFE-OP state (safe PDO communication allowed)...\n");
ec_statecheck(0, EC_STATE_SAFE_OP, EC_TIMEOUTSTATE);
ret = ec_writestate(0);
if (ret == EK_OK) {
print_state_info("SAFE-OP", 1);
} else {
print_state_info("SAFE-OP", 0);
}
// Enter OP state (full PDO communication allowed)
printf("\n📡 Entering OP state (full PDO communication allowed)...\n");
ec_statecheck(0, EC_STATE_OPERATIONAL, EC_TIMEOUTSTATE);
ret = ec_writestate(0);
if (ret == EK_OK) {
print_state_info("OP", 1);
} else {
print_state_info("OP", 0);
}
// Switch between different control modes
printf("\n=== Control Mode Testing ===\n");
set_control_mode(1); // Position control
set_control_mode(3); // Velocity control
set_control_mode(4); // Torque control
set_control_mode(6); // Homing
set_control_mode(7); // Interpolated position mode
set_control_mode(8); // Cyclic synchronous position mode
set_control_mode(0); // No mode
// Set servo parameters
printf("\n=== Setting Servo Parameters ===\n");
set_servo_parameters();
// Configure PDO mapping
printf("\n=== Configuring PDO Mapping ===\n");
configure_pdo_mapping();
// Print final slave state
printf("\nSlave state: %d\n", ec_slave[1].state);
printf("\nEtherCAT communication test completed\n");
// Cleanup
ec_close();
return 0;
}
void print_state_info(const char* state_name, int success)
{
if (success) {
printf("📡 Successfully entered %s state\n", state_name);
} else {
printf("📡 Failed to enter %s state\n", state_name);
}
}
void set_control_mode(int mode)
{
uint8_t mode_data = (uint8_t)mode;
int ret;
// Write control mode to object 0x6060
ret = ec_SDOwrite(1, 0x6060, 0, FALSE, sizeof(mode_data), &mode_data, EC_TIMEOUTRXM);
if (ret > 0) {
switch(mode) {
case 1:
printf("✅ Successfully set position control mode\n");
break;
case 3:
printf("✅ Successfully set velocity control mode\n");
break;
case 4:
printf("✅ Successfully set torque control mode\n");
break;
case 6:
printf("✅ Successfully set homing mode\n");
break;
case 7:
printf("✅ Successfully set interpolated position mode\n");
break;
case 8:
printf("✅ Successfully set cyclic synchronous position mode\n");
break;
case 0:
printf("✅ Successfully set no mode\n");
break;
default:
printf("✅ Successfully set mode %d\n", mode);
break;
}
} else {
printf("❌ Failed to set control mode %d\n", mode);
}
// Read back the current mode
read_control_mode();
sleep_ms(1000);
}
void read_control_mode(void)
{
int ret;
uint8_t mode_data;
int wkc;
ret = ec_SDOread(1, 0x6060, 0, FALSE, &wkc, &mode_data, sizeof(mode_data), EC_TIMEOUTRXM);
if (ret > 0) {
printf("Current mode: %d\n", mode_data);
} else {
printf("Failed to read current mode\n");
}
}
void set_servo_parameters(void)
{
int ret;
uint32_t param_value;
int wkc;
// Set maximum position range (0x607F)
param_value = 1000000;
ret = ec_SDOwrite(1, 0x607F, 0, FALSE, sizeof(param_value), ¶m_value, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Set maximum position range: %u\n", param_value);
} else {
printf("❌ Failed to set position range\n");
}
// Read back position range
ret = ec_SDOread(1, 0x607F, 0, FALSE, &wkc, ¶m_value, sizeof(param_value), EC_TIMEOUTRXM);
if (ret > 0) {
printf("Position range: %u\n", param_value);
}
// Set maximum velocity (0x6081)
param_value = 1000000;
ret = ec_SDOwrite(1, 0x6081, 0, FALSE, sizeof(param_value), ¶m_value, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Set maximum velocity: %u\n", param_value);
} else {
printf("❌ Failed to set velocity\n");
}
// Read back velocity
ret = ec_SDOread(1, 0x6081, 0, FALSE, &wkc, ¶m_value, sizeof(param_value), EC_TIMEOUTRXM);
if (ret > 0) {
printf("Maximum velocity: %u\n", param_value);
}
// Set maximum acceleration (0x6083)
param_value = 1000;
ret = ec_SDOwrite(1, 0x6083, 0, FALSE, sizeof(param_value), ¶m_value, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Set maximum acceleration: %u\n", param_value);
} else {
printf("❌ Failed to set acceleration\n");
}
// Read back acceleration
ret = ec_SDOread(1, 0x6083, 0, FALSE, &wkc, ¶m_value, sizeof(param_value), EC_TIMEOUTRXM);
if (ret > 0) {
printf("Maximum acceleration: %u\n", param_value);
}
printf("✅ Successfully set servo parameters\n");
}
void configure_pdo_mapping(void)
{
int ret;
uint8_t mapping_count;
uint32_t mapping_data;
int wkc;
// Configure receive PDO mapping (1600h) - Master to slave
printf("Configuring receive PDO mapping (1600h)...\n");
// Clear existing mapping
mapping_count = 0;
ret = ec_SDOwrite(1, 0x1600, 0, FALSE, sizeof(mapping_count), &mapping_count, EC_TIMEOUTRXM);
// Set control word mapping (6040h, 16-bit)
mapping_data = 0x60400010;
ret = ec_SDOwrite(1, 0x1600, 1, FALSE, sizeof(mapping_data), &mapping_data, EC_TIMEOUTRXM);
// Set target position mapping (607Ah, 32-bit)
mapping_data = 0x607A0020;
ret = ec_SDOwrite(1, 0x1600, 2, FALSE, sizeof(mapping_data), &mapping_data, EC_TIMEOUTRXM);
// Set mapping count
mapping_count = 2;
ret = ec_SDOwrite(1, 0x1600, 0, FALSE, sizeof(mapping_count), &mapping_count, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Receive PDO mapping configured\n");
} else {
printf("❌ Failed to configure receive PDO mapping\n");
}
// Configure transmit PDO mapping (1A00h) - Slave to master
printf("Configuring transmit PDO mapping (1A00h)...\n");
// Clear existing mapping
mapping_count = 0;
ret = ec_SDOwrite(1, 0x1A00, 0, FALSE, sizeof(mapping_count), &mapping_count, EC_TIMEOUTRXM);
// Set status word mapping (6041h, 16-bit)
mapping_data = 0x60410010;
ret = ec_SDOwrite(1, 0x1A00, 1, FALSE, sizeof(mapping_data), &mapping_data, EC_TIMEOUTRXM);
// Set actual position mapping (6064h, 32-bit)
mapping_data = 0x60640020;
ret = ec_SDOwrite(1, 0x1A00, 2, FALSE, sizeof(mapping_data), &mapping_data, EC_TIMEOUTRXM);
// Set mapping count
mapping_count = 2;
ret = ec_SDOwrite(1, 0x1A00, 0, FALSE, sizeof(mapping_count), &mapping_count, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Transmit PDO mapping configured\n");
} else {
printf("❌ Failed to configure transmit PDO mapping\n");
}
printf("✅ PDO mapping configuration completed\n");
}
void sleep_ms(int milliseconds)
{
usleep(milliseconds * 1000);
}
Create a Makefile file to compile this program:
Replace SOEM_PATH to your own installation path!
Makefile
# Makefile for EtherCAT Communication Test with Local SOEM Library
# Compiler and flags
CC = gcc
CFLAGS = -Wall -Wextra -std=c99 -O2
LDFLAGS = -lrt -lpthread
# Local SOEM library paths
SOEM_PATH = /home/seeed/ethercat/SOEM
INCLUDES = -I$(SOEM_PATH)/build/install/include
LIBS = -L$(SOEM_PATH)/build -lsoem
# Target executables
TARGET_FULL = ethercat_communication_test
TARGET_SIMPLE = ethercat_simple_test
# Source files
SOURCES_FULL = ethercat_communication_test.c
SOURCES_SIMPLE = ethercat_simple_test.c
# Object files
OBJECTS_FULL = $(SOURCES_FULL:.c=.o)
OBJECTS_SIMPLE = $(SOURCES_SIMPLE:.c=.o)
# Default target
all: $(TARGET_SIMPLE)
# Build the simple version (recommended)
simple: $(TARGET_SIMPLE)
# Build the full version
full: $(TARGET_FULL)
# Build the simple executable
$(TARGET_SIMPLE): $(OBJECTS_SIMPLE)
$(CC) $(OBJECTS_SIMPLE) -o $(TARGET_SIMPLE) $(LIBS) $(LDFLAGS)
@echo "✅ Simple version build completed successfully!"
@echo "Run with: sudo ./$(TARGET_SIMPLE)"
# Build the full executable
$(TARGET_FULL): $(OBJECTS_FULL)
$(CC) $(OBJECTS_FULL) -o $(TARGET_FULL) $(LIBS) $(LDFLAGS)
@echo "✅ Full version build completed successfully!"
@echo "Run with: sudo ./$(TARGET_FULL)"
# Compile source files
%.o: %.c
$(CC) $(CFLAGS) $(INCLUDES) -c $< -o $@
# Clean build files
clean:
rm -f $(OBJECTS_FULL) $(OBJECTS_SIMPLE) $(TARGET_FULL) $(TARGET_SIMPLE)
@echo "🧹 Cleaned build files"
# Check local SOEM installation
check-soem:
@echo "Checking local SOEM installation..."
@if [ -f "$(SOEM_PATH)/build/install/include/soem/soem.h" ]; then \
echo "✅ SOEM headers found at $(SOEM_PATH)/build/install/include/soem/soem.h"; \
else \
echo "❌ SOEM headers not found"; \
fi
@if [ -f "$(SOEM_PATH)/build/libsoem.a" ]; then \
echo "✅ SOEM library found at $(SOEM_PATH)/build/libsoem.a"; \
else \
echo "❌ SOEM library not found"; \
fi
# Test compilation
test-compile: check-soem
@echo "Testing compilation..."
@make clean
@make simple
@echo "✅ Compilation test successful!"
# Manual compilation commands for reference
manual-compile:
@echo "Manual compilation commands:"
@echo "Simple version:"
@echo " gcc -Wall -Wextra -std=c99 -O2 \\"
@echo " -I$(SOEM_PATH)/build/install/include \\"
@echo " ethercat_simple_test.c \\"
@echo " -o ethercat_simple_test \\"
@echo " -L$(SOEM_PATH)/build -lsoem -lrt -lpthread"
@echo ""
@echo "Full version:"
@echo " gcc -Wall -Wextra -std=c99 -O2 \\"
@echo " -I$(SOEM_PATH)/build/install/include \\"
@echo " ethercat_communication_test.c \\"
@echo " -o ethercat_communication_test \\"
@echo " -L$(SOEM_PATH)/build -lsoem -lrt -lpthread"
# Help target
help:
@echo "Available targets:"
@echo " all - Build the simple version (default)"
@echo " simple - Build the simple version"
@echo " full - Build the full version"
@echo " clean - Remove build files"
@echo " check-soem - Check local SOEM installation"
@echo " test-compile - Test compilation"
@echo " manual-compile - Show manual compilation commands"
@echo " help - Show this help message"
@echo ""
@echo "Quick start:"
@echo " make # Build the program"
@echo " sudo ./ethercat_simple_test # Run the program"
@echo ""
@echo "SOEM library location: $(SOEM_PATH)"
Compile and run the program:
make gcc -Wall -Wextra -std=c99 -O2 -I/home/seeed/ethercat/SOEM/build/install/include -c ethercat_simple_test.c -o ethercat_simple_test.o
sudo ./ethercat_simple_test
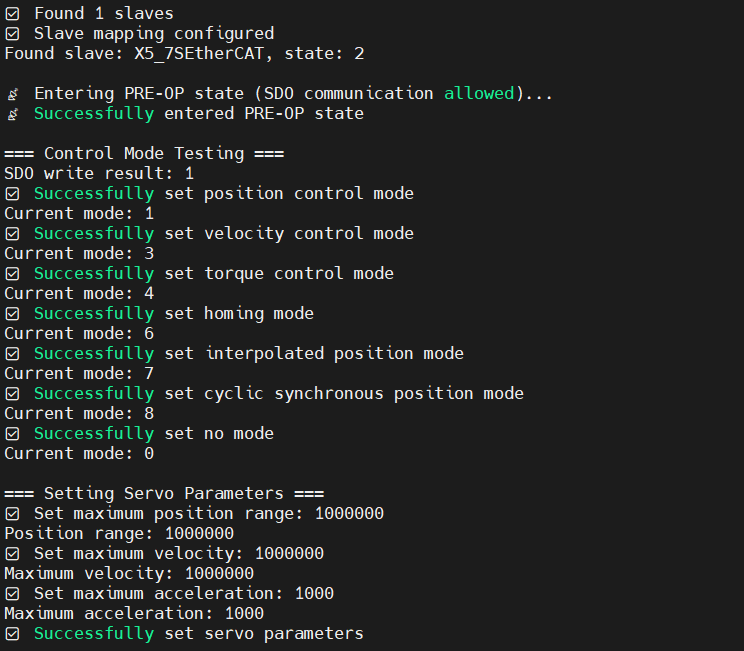
As shown above, successful EtherCat communication will modify the slave station's driving mode, and it will be able to normally read the status information of the slave station.
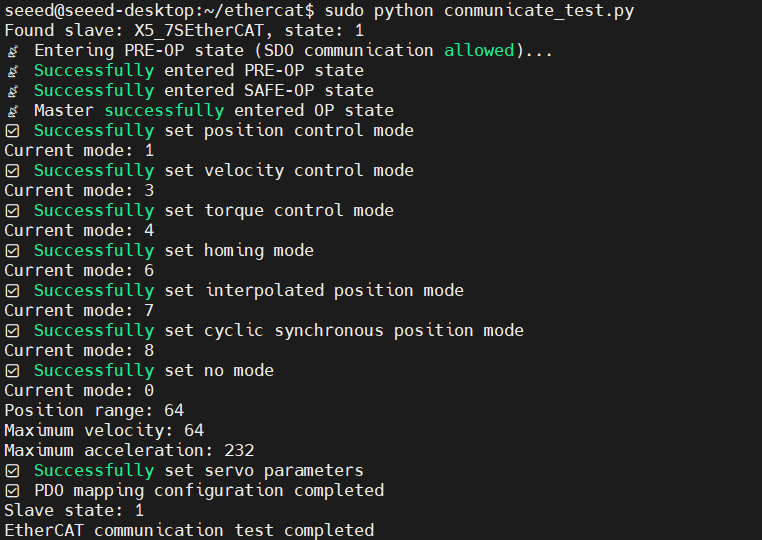
Python Example
For Python-based applications, you can use the pysoem library:
conmunicate_test.py
import pysoem
import time
import struct
# Initialize EtherCAT communication
# Network interface name
interface_name = "enP8p1s0"
# Create EtherCAT master object
master = pysoem.Master()
# Open EtherCAT master connection
master.open(interface_name)
# Initialize slaves
master.config_init()
slaver = master.slaves[0]
print(f"Found slave: {slaver.name}, state: {slaver.state}")
print("📡 Entering PRE-OP state (SDO communication allowed)...")
# Set master state to PREOP_STATE
master.state = pysoem.PREOP_STATE
# Write state to EtherCAT network
master.write_state()
# Check if entered successfully
if master.state == pysoem.PREOP_STATE:
print("📡 Successfully entered PRE-OP state")
else:
print("📡 Failed to enter PRE-OP state")
# Enter SAFE-OP state (safe PDO communication allowed)
master.state = pysoem.SAFEOP_STATE
master.write_state()
# Check if entered successfully
if master.state == pysoem.SAFEOP_STATE:
print("📡 Successfully entered SAFE-OP state")
else:
print("📡 Failed to enter SAFE-OP state")
# Enter OP state (full PDO communication allowed)
master.state = pysoem.OP_STATE
master.write_state()
# Check if entered successfully
if master.state == pysoem.OP_STATE:
print("📡 Master successfully entered OP state")
else:
print("📡 Failed to enter OP state")
# Switch between different control modes
slaver.sdo_write(0x6060, 0, struct.pack('<B', 1)) # Set mode to position control
print("✅ Successfully set position control mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 3)) # Set mode to velocity control
print("✅ Successfully set velocity control mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 4)) # Set mode to torque control
print("✅ Successfully set torque control mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 6)) # Set mode to homing
print("✅ Successfully set homing mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 7)) # Set mode to interpolated position mode
print("✅ Successfully set interpolated position mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 8)) # Set mode to cyclic synchronous position mode
print("✅ Successfully set cyclic synchronous position mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 0)) # Set mode to no mode
print("✅ Successfully set no mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
# Set necessary parameters for control configuration
slaver.sdo_write(0x607F, 0, struct.pack('<I', 1000000)) # Maximum position range
print(f"Position range: {slaver.sdo_read[0x607F, 0](0)}")
slaver.sdo_write(0x6081, 0, struct.pack('<I', 1000000)) # Maximum velocity
print(f"Maximum velocity: {slaver.sdo_read[0x6081, 0](0)}")
slaver.sdo_write(0x6083, 0, struct.pack('<I', 1000)) # Maximum acceleration
print(f"Maximum acceleration: {slaver.sdo_read[0x6083, 0](0)}")
print("✅ Successfully set servo parameters")
# Configure receive PDO mapping (1600h) - Master to slave
slaver.sdo_write(0x1600, 0, struct.pack('<B', 0)) # Clear existing mapping
slaver.sdo_write(0x1600, 1, struct.pack('<I', 0x60400010)) # Control word (6040h, 16-bit)
slaver.sdo_write(0x1600, 2, struct.pack('<I', 0x607A0020)) # Target position (607Ah, 32-bit)
slaver.sdo_write(0x1600, 0, struct.pack('<B', 2)) # Set mapping count
# Configure transmit PDO mapping (1A00h) - Slave to master
slaver.sdo_write(0x1A00, 0, struct.pack('<B', 0)) # Clear existing mapping
slaver.sdo_write(0x1A00, 1, struct.pack('<I', 0x60410010)) # Status word (6041h, 16-bit)
slaver.sdo_write(0x1A00, 2, struct.pack('<I', 0x60640020)) # Actual position (6064h, 32-bit)
slaver.sdo_write(0x1A00, 0, struct.pack('<B', 2)) # Set mapping count
print("✅ PDO mapping configuration completed")
print(f"Slave state: {slaver.state}")
print("EtherCAT communication test completed")
Before running the Python script, you need to install the pysoem library:
pip3 install pysoem
# Run Python example with sudo
sudo python3 ethercat_python.py
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.