DoA and VAD reSpeaker Flex with Xiao ESP32S3
Introduction
The ReSpeaker Flex is a multi-microphone voice processing solution based on the XMOS XVF3800, designed for embedded applications requiring real-time audio intelligence. The XVF3800 internally computes Voice Activity Detection (VAD) and Direction of Arrival (DoA) to indicate when speech is present and the direction it originates from. These inference results can be accessed directly by a host MCU over I2C using resource-based commands, enabling features such as wake-on-voice, sound source localization, and direction-aware feedback without processing raw audio on the host.
| reSpeaker Flex XVF3800 Linear with XIAO ESP32S3 | reSpeaker Flex XVF3800 Circular with XIAO ESP32S3 | |
|---|---|---|
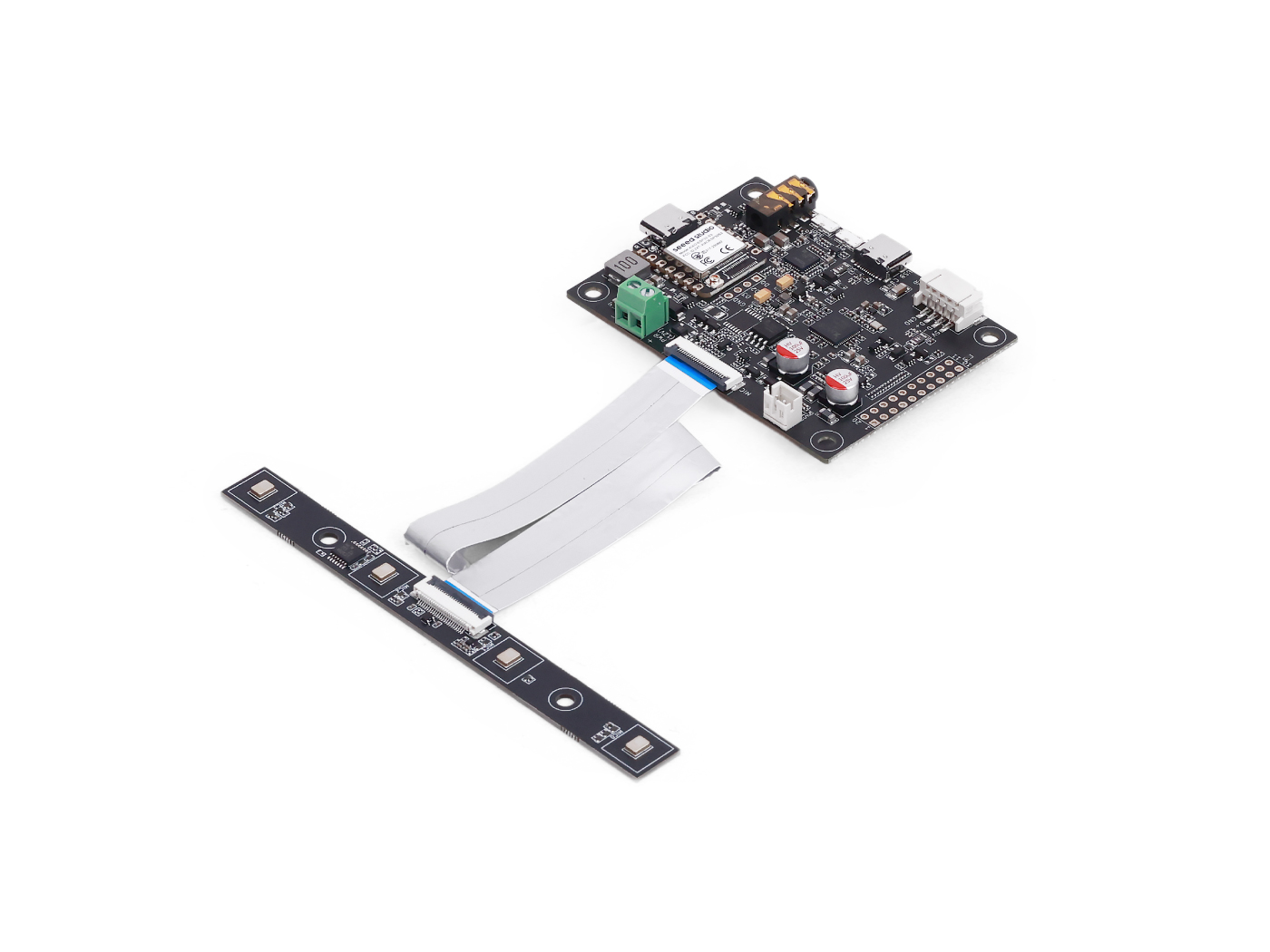 |  | |
The Firmware that support for this code is respeaker_xvf3800_i2s_master_dfu_firmware_v1.0.x_48k_test5.bin. So please make sure to flash first
Arduino Code
#include <Wire.h>
#include "AudioTools.h"
// ── I2C ──────────────────────────────────────────────────────────
#define XMOS_ADDR 0x2C
#define GPO_SERVICER_RESID 20 // resid
#define GPO_SERVICER_RESID_DOA 18 // cmdid — fixed from 19 to 18 (matches Python)
#define GPO_DOA_READ_NUM_BYTES 4
// ── I2S pins (XIAO ESP32S3 ↔ ReSpeaker Flex) ─────────────────────
#define I2S_BCK_PIN 8
#define I2S_WS_PIN 7
#define I2S_DATA_PIN 43 // RX from XVF3800
// ── Audio config ──────────────────────────────────────────────────
const int SAMPLE_RATE = 16000;
const int CHANNELS = 2; // stereo interleaved from XVF3800
const int BITS = 32;
const int BLOCK_SAMPLES = 512; // samples per chunk (both channels)
AudioInfo audioInfo(SAMPLE_RATE, CHANNELS, BITS);
I2SStream i2s;
// ── Timing ────────────────────────────────────────────────────────
unsigned long lastDoaMs = 0;
const unsigned long DOA_INTERVAL_MS = 250;
// ─────────────────────────────────────────────────────────────────
bool read_doa(uint16_t &doa_angle, uint16_t &speech) {
Wire.beginTransmission(XMOS_ADDR);
Wire.write(GPO_SERVICER_RESID);
Wire.write(GPO_SERVICER_RESID_DOA | 0x80); // read flag
Wire.write(GPO_DOA_READ_NUM_BYTES + 1); // +1 for status byte
if (Wire.endTransmission() != 0) return false;
uint8_t total = GPO_DOA_READ_NUM_BYTES + 1;
Wire.requestFrom(XMOS_ADDR, total);
if (Wire.available() < total) return false;
uint8_t status = Wire.read(); // status byte (0x00 = OK)
uint8_t buf[4];
for (uint8_t i = 0; i < GPO_DOA_READ_NUM_BYTES; i++) buf[i] = Wire.read();
// Match Python: DOA = result[1] + result[2]*256
// SPEECH = result[3]
doa_angle = (uint16_t)buf[0] | ((uint16_t)buf[1] << 8);
speech = (uint16_t)buf[2] | ((uint16_t)buf[3] << 8);
return true;
}
// RMS on left channel only (stride 2 over stereo interleaved buffer)
float compute_rms(int32_t *samples, int total_samples) {
double sum = 0;
int count = 0;
for (int i = 0; i < total_samples; i += 2) {
double s = (double)samples[i] / (double)INT32_MAX;
sum += s * s;
count++;
}
return count > 0 ? (float)sqrt(sum / count) : 0.0f;
}
// ─────────────────────────────────────────────────────────────────
void setup() {
Serial.begin(115200);
while (!Serial);
Wire.begin();
delay(500);
I2SConfig cfg = i2s.defaultConfig(RX_MODE);
cfg.copyFrom(audioInfo);
cfg.pin_bck = I2S_BCK_PIN;
cfg.pin_ws = I2S_WS_PIN;
cfg.pin_data_rx = I2S_DATA_PIN;
cfg.is_master = true;
if (!i2s.begin(cfg)) {
Serial.println("ERROR: I2S init failed");
while (true);
}
Serial.println("Ready — angle | speech | rms");
}
// ─────────────────────────────────────────────────────────────────
static int32_t audioBuf[BLOCK_SAMPLES * CHANNELS];
void loop() {
// ── I2S read ─────────────────────────────────────────────────
size_t bytesRead = i2s.readBytes((uint8_t *)audioBuf, sizeof(audioBuf));
float rms = 0.0f;
if (bytesRead > 0) {
rms = compute_rms(audioBuf, bytesRead / sizeof(int32_t));
}
// ── DOA poll ─────────────────────────────────────────────────
unsigned long now = millis();
if (now - lastDoaMs >= DOA_INTERVAL_MS) {
lastDoaMs = now;
uint16_t doa = 0, speech = 0;
if (read_doa(doa, speech)) {
Serial.printf("%4u deg | %s | %.4f\n",
doa,
speech ? "SPEECH" : "silent",
rms
);
} else {
Serial.println("I2C read failed");
}
}
}
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.