ReSpeaker Mic Array v3.0

ReSpeaker Mic Array v3.0 is the next evolution of Seeed Studio’s USB microphone arrays, following the ReSpeaker Mic Array v2.0. While the v2.0 was built on XMOS’s XVF-3000 chipset and designed as a major upgrade from v1.0, the v3.0 focuses on refining audio quality and algorithm performance, even with a smaller physical microphone count.
Compared with the v2.0’s 4-mic array, the v3.0 also uses 4 microphones but integrates improved built-in audio processing algorithms, offering clearer far-field voice capture and better noise handling than its predecessor. The v3.0 replaces the WM8960 codec in v2.0 with a TLV320AIC3104 codec, contributing to higher fidelity sound capture.
While the v2.0 was often paired with the ReSpeaker Core or used as a development board, the v3.0 is more of a plug-and-play USB device—similar to the v2.0 in supporting USB Audio Class 1.0 for full compatibility with Windows, macOS, and Linux—yet tuned for out-of-the-box voice interface performance without requiring additional hardware.
Feature-wise, both support far-field voice capture and speech-enhancing algorithms like AEC (Acoustic Echo Cancellation), VAD (Voice Activity Detection), DOA (Direction of Arrival), Beamforming, and Noise Suppression, but the v3.0’s algorithm optimizations deliver cleaner audio in real-world noisy environments.
The LED system remains at 12 programmable RGB LEDs in both versions, but the v3.0 is modeled after the newer USB 4 Mic Array design, making it smaller and simpler than the v2.0’s developer-oriented form factor, while still retaining key professional voice interface features.

![]()
Version
| Product Version | Changes | Released Date |
|---|---|---|
| ReSpeaker Mic Array v1.0 | Initial | Aug 15, 2016 |
| ReSpeaker Mic Array v2.0 | XVSM-2000 is EOL,change MCU to XVF-3000 and reduce the Mics from 7 to 4. | Jan 25, 2018 |
| ReSpeaker Mic Array v3.0 | Codec Changed to TLV320AIC3104 | Jan 19, 2021 |
Features
- Far-field voice capture
- Support USB Audio Class 1.0 (UAC 1.0)
- Four microphones array
- 12 programmable RGB LED indicators
- Speech algorithms and features
- Voice Activity Detection
- Direction of Arrival
- Beamforming
- Noise Suppression
- De-reverberation
- Acoustic Echo Cancellation
Specification
- XVF-3000 from XMOS
- 4 high performance digital microphones
- Supports Far-field Voice Capture
- Speech algorithm on-chip
- 12 programmable RGB LED indicators
- Microphones: ST MP34DT01TR-M
- Sensitivity: -26 dBFS (Omnidirectional)
- Acoustic overload point: 120 dBSPL
- SNR: 61 dB
- Power Supply: 5V DC from Micro USB or expansion header
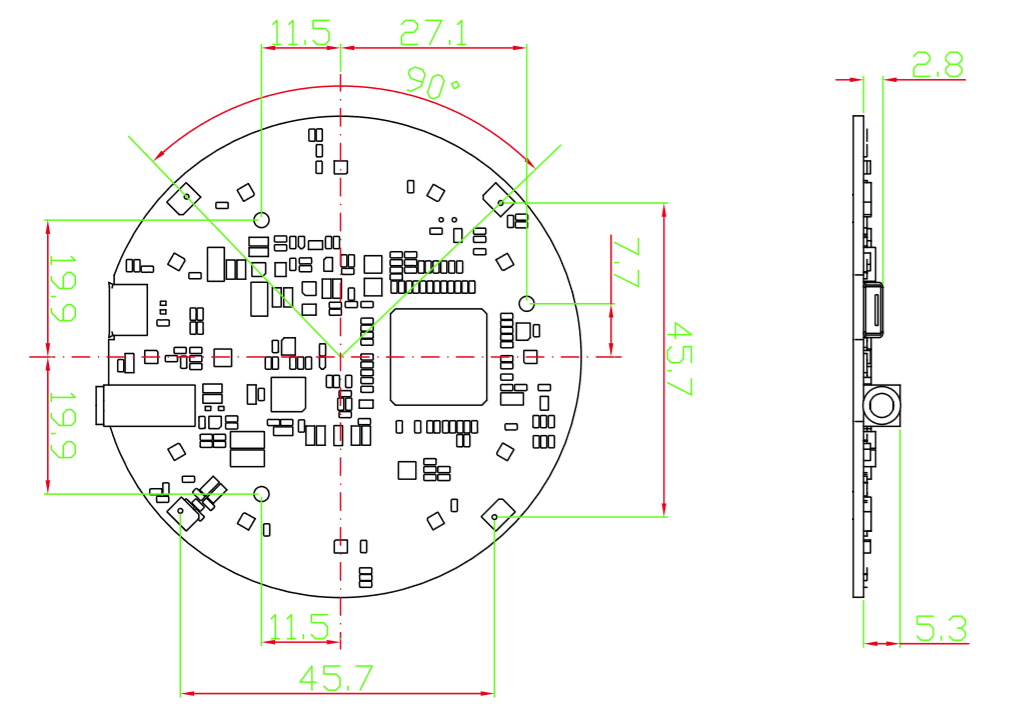
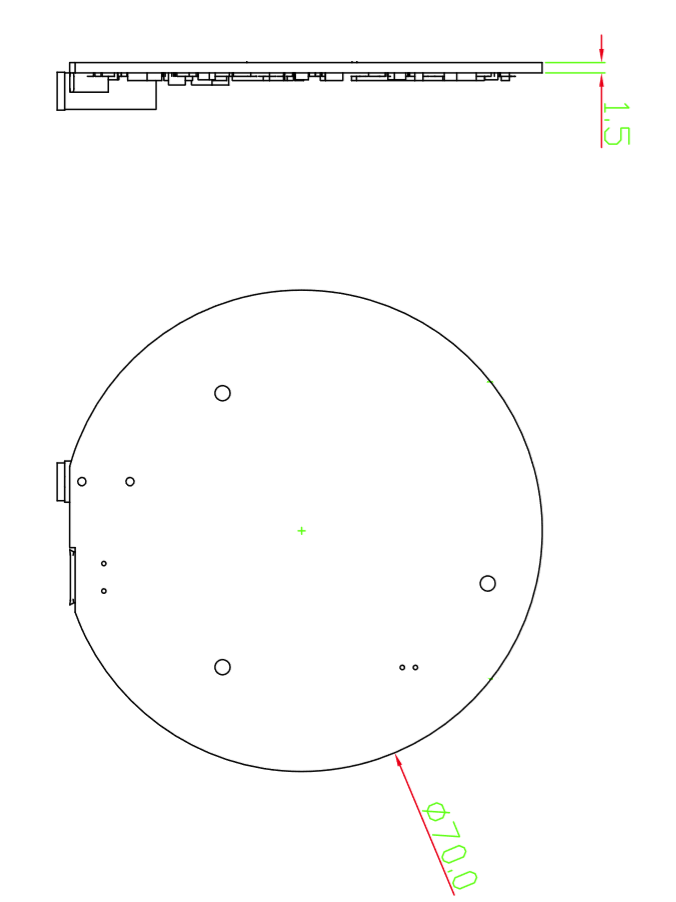
- Dimensions: 70mm (Diameter)
- 3.5mm Audio jack output socket
- Power consumption: 5V, 180mA with led on and 170mA with led off
- Max Sample Rate:16Khz
Hardware Overview

-
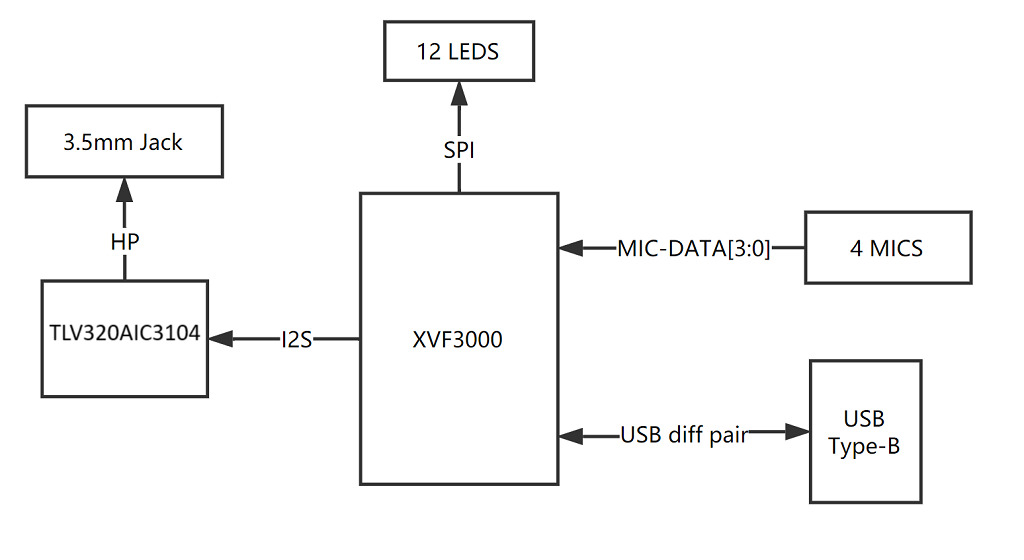
① XMOS XVF-3000: It integrates advanced DSP algorithms that include Acoustic Echo Cancellation (AEC), beamforming, dereverberation, noise suppression and gain control.
-
② Digital Microphone: The MP34DT01-M is an ultra-compact, lowpower, omnidirectional, digital MEMS microphone built with a capacitive sensing element and an IC interface.
-
③ RGB LED: Three-color RGB LED.
-
④ USB Port: Provide the power and control the mic array.
-
⑤ 3.5mm Headphone jack: Output audio, We can plug active speakers or Headphones into this port.
-
⑥ TLV320AIC3104: The TLV320AIC3104 is a low power stereo codec featuring Class D speaker drivers to provide 1 W per channel into 8 W loads.
System Diagram
Pin Map

Dimensions
Applications
- USB Voice Capture
- Smart Speaker
- Intelligent Voice Assistant Systems
- Voice Recorders
- Voice Conferencing System
- Meeting Communicating Equipment
- Voice Interacting Robot
- Car Voice Assistant
- Other Voice Interface Scenarios
Getting Started
ReSpeaker Mic Array v3.0 is compatiable with Windows, Mac, Linux systems andriod. The below scripts are tested on Python2.7.
For andriod, we tested it with emteria.OS(andriod 7.1) on Raspberry. We plug the mic array v3.0 to raspberry pi USB port and select the ReSpeaker mic array v3.0 as audio device. Here is the audio recording screen.

Here is the audio playing screen. We plug speaker to ReSpeaker mic array v3.0 3.5mm audio jack and hear what we record.

Update Firmware
There are 2 firmwares. One includes 1 channel data, while the other inlcudes 6 channels data (factory firmware). Here is the table for the differences.
| Firmware | Channels | Note |
|---|---|---|
| 1_channel_firmware.bin | 1 | Processed audio for ASR |
| 6_channels_firmware.bin | 6 | Channel 0: processed audio for ASR Channel 1: mic1 raw data Channel 2: mic2 raw data Channel 3: mic3 raw data Channel 4: mic4 raw data Channel 5: merged playback |
For Linux: The Mic array supports the USB DFU. We develop a python script dfu.py to update the firmware through USB.
sudo apt-get update
sudo pip install pyusb click
git clone https://github.com/respeaker/usb_4_mic_array.git
cd usb_4_mic_array
sudo python dfu.py --download MicArrayV3_firmware/6_channels_dfu_4.0.0_firmware.bin # The 6 channels version
# if you want to use 1 channel,then the command should be like:
sudo python dfu.py --download MicArrayV3_firmware/1_channel_dfu_4.0.0_firmware.bin
For Windows/Mac: We do not suggest use Windows/Mac and Linux vitual machine to update the firmware.
Out of Box Demo
Here is the Acoustic Echo Cancellation example with 6 channels firmware.
- Step 1. Connect the USB cable to PC and audio jack to speaker.

- Step 2. Select the mic array v3.0 as output device in PC side.
- Step 3. Start the audacity to record.
- Step 4. Play music at PC side first and then we talk.
- Step 5. We will see the audacity screen as below, Please click Solo to hear each channel audio.

Channel0 Audio(processed by algorithms):
Channel1 Audio(Mic1 raw data):
Channel5 Audio(Playback data):
Here is the video about the DOA and AEC.
Install DFU and LED Control Driver
- Windows: Audio recording and playback works well by default. Libusb-win32 driver is only required to control LEDs an DSP parameters on Windows. We use a handy tool - Zadig to install the libusb-win32 driver for both
SEEED DFUandSEEED Control(ReSpeaker Mic Array has 2 devices on Windows Device Manager).

Please make sure that libusb-win32 is selected, not WinUSB or libusbK.
- MAC: No driver is required.
- Linux: No driver is required.
Tuning
For Linux/Mac/Windows: We can configure some parameters of built-in algorithms.
- Get the full list parameters, for more info, please refer to FAQ.
git clone https://github.com/respeaker/usb_4_mic_array.git
cd usb_4_mic_array
python tuning.py -p
- Example#1, we can turn off Automatic Gain Control (AGC):
python tuning.py AGCONOFF 0
- Example#2, We can check the DOA angle.
pi@raspberrypi:~/usb_4_mic_array $ sudo python tuning.py DOAANGLE
DOAANGLE: 180
Control the LEDs
We can control the ReSpeaker Mic Array V2's LEDs through USB. The USB device has a Vendor Specific Class Interface which can be used to send data through USB Control Transfer. We refer pyusb python library and come out the usb_pixel_ring python library.
The LED control command is sent by pyusb's usb.core.Device.ctrl_transfer(), its parameters as below:
ctrl_transfer(usb.util.CTRL_OUT | usb.util.CTRL_TYPE_VENDOR | usb.util.CTRL_RECIPIENT_DEVICE, 0, command, 0x1C, data, TIMEOUT)
Here are the usb_pixel_ring APIs.
| Command | Data | API | Note |
|---|---|---|---|
| 0 | [0] | pixel_ring.trace() | trace mode, LEDs changing depends on VADand DOA |
| 1 | [red, green, blue, 0] | pixel_ring.mono() | mono mode, set all RGB LED to a single color, for example Red(0xFF0000), Green(0x00FF00), Blue(0x0000FF) |
| 2 | [0] | pixel_ring.listen() | listen mode, similar with trace mode, but not turn LEDs off |
| 3 | [0] | pixel_ring.speak() | wait mode |
| 4 | [0] | pixel_ring.think() | speak mode |
| 5 | [0] | pixel_ring.spin() | spin mode |
| 6 | [r, g, b, 0] * 12 | pixel_ring.custimize() | custom mode, set each LED to its own color |
| 0x20 | [brightness] | pixel_ring.set_brightness() | set brightness, range: 0x00~0x1F |
| 0x21 | [r1, g1, b1, 0, r2, g2, b2, 0] | pixel_ring.set_color_palette() | set color palette, for example, pixel_ring.set_color_palette(0xff0000, 0x00ff00) together with pixel_ring.think() |
| 0x22 | [vad_led] | pixel_ring.set_vad_led() | set center LED: 0 - off, 1 - on, else - depends on VAD |
| 0x23 | [volume] | pixel_ring.set_volume() | show volume, range: 0 ~ 12 |
| 0x24 | [pattern] | pixel_ring.change_pattern() | set pattern, 0 - Google Home pattern, others - Echo pattern |
For Linux: Here is the example to control the leds. Please follow below commands to run the demo.
git clone https://github.com/respeaker/pixel_ring.git
cd pixel_ring
sudo python setup.py install
sudo python examples/usb_mic_array.py
Here is the code of the usb_mic_array.py.
import time
from pixel_ring import pixel_ring
if __name__ == '__main__':
pixel_ring.change_pattern('echo')
while True:
try:
pixel_ring.wakeup()
time.sleep(3)
pixel_ring.think()
time.sleep(3)
pixel_ring.speak()
time.sleep(6)
pixel_ring.off()
time.sleep(3)
except KeyboardInterrupt:
break
pixel_ring.off()
time.sleep(1)
For Windows/Mac: Here is the example to control the leds.
- Step 1. Download pixel_ring.
git clone https://github.com/respeaker/pixel_ring.git
cd pixel_ring/pixel_ring
- Step 2. Create a led_control.py with below code and run 'python led_control.py'
from usb_pixel_ring_v2 import PixelRing
import usb.core
import usb.util
import time
dev = usb.core.find(idVendor=0x2886, idProduct=0x0018)
print dev
if dev:
pixel_ring = PixelRing(dev)
while True:
try:
pixel_ring.wakeup(180)
time.sleep(3)
pixel_ring.listen()
time.sleep(3)
pixel_ring.think()
time.sleep(3)
pixel_ring.set_volume(8)
time.sleep(3)
pixel_ring.off()
time.sleep(3)
except KeyboardInterrupt:
break
pixel_ring.off()
If you see "None" printed on screen, please reinstall the libusb-win32 driver.
DOA (Direction of Arrival)
For Windows/Mac/Linux: Here is the example to view the DOA. The Green LED is the indicator of the voice direction. For the angle, please refer to hardware overview.
- Step 1. Download the usb_4_mic_array.
git clone https://github.com/respeaker/usb_4_mic_array.git
cd usb_4_mic_array
- Step 2. Create a DOA.py with below code under usb_4_mic_array folder and run 'python DOA.py'
from tuning import Tuning
import usb.core
import usb.util
import time
dev = usb.core.find(idVendor=0x2886, idProduct=0x0018)
if dev:
Mic_tuning = Tuning(dev)
print Mic_tuning.direction
while True:
try:
print Mic_tuning.direction
time.sleep(1)
except KeyboardInterrupt:
break
- Step 3. We will see the DOA as below.
pi@raspberrypi:~/usb_4_mic_array $ sudo python doa.py
184
183
175
105
104
104
103
VAD (Voice Activity Detection)
For Windows/Mac/Linux: Here is the example to view the VAD. The Red LED is the indicator of the VAD.
- Step 1. Download the usb_4_mic_array.
git clone https://github.com/respeaker/usb_4_mic_array.git
cd usb_4_mic_array
- Step 2. Create a VAD.py with below code under usb_4_mic_array folder and run 'python VAD.py'
from tuning import Tuning
import usb.core
import usb.util
import time
dev = usb.core.find(idVendor=0x2886, idProduct=0x0018)
#print dev
if dev:
Mic_tuning = Tuning(dev)
print Mic_tuning.is_voice()
while True:
try:
print Mic_tuning.is_voice()
time.sleep(1)
except KeyboardInterrupt:
break
- Step 3. We will see the DOA as below.
pi@raspberrypi:~/usb_4_mic_array $ sudo python VAD.py
0
0
0
1
0
1
0
For the threshold of VAD, we also can use the GAMMAVAD_SR to set. Please refer to Tuning for more detail.
Extract Voice
We use PyAudio python library to extract voice through USB.
For Linux: We can use below commands to record or play the voice.
arecord -D plughw:1,0 -f cd test.wav # record, please use the arecord -l to check the card and hardware first
aplay -D plughw:1,0 -f cd test.wav # play, please use the aplay -l to check the card and hardware first
arecord -D plughw:1,0 -f cd |aplay -D plughw:1,0 -f cd # record and play at the same time
We also can use python script to extract voice.
- Step 1, We need to run the following script to get the device index number of Mic Array:
sudo pip install pyaudio
cd ~
nano get_index.py
- Step 2, copy below code and paste on get_index.py.
If you are using Python 3, this file is suitable for use get_index.py
import pyaudio
p = pyaudio.PyAudio()
info = p.get_host_api_info_by_index(0)
numdevices = info.get('deviceCount')
for i in range(0, numdevices):
if (p.get_device_info_by_host_api_device_index(0, i).get('maxInputChannels')) > 0:
print "Input Device id ", i, " - ", p.get_device_info_by_host_api_device_index(0, i).get('name')
-
Step 3, press
Ctrl+Xto exit and press Y to save. -
Step 4, run 'sudo python get_index.py' and we will see the device ID as below.
Input Device id 2 - ReSpeaker 4 Mic Array (UAC1.0): USB Audio (hw:1,0)
- Step 5, change
RESPEAKER_INDEX = 2to index number. Run python script record.py to record a speech.
import pyaudio
import wave
RESPEAKER_RATE = 16000
RESPEAKER_CHANNELS = 6 # change base on firmwares, 1_channel_firmware.bin as 1 or 6_channels_firmware.bin as 6
RESPEAKER_WIDTH = 2
# run getDeviceInfo.py to get index
RESPEAKER_INDEX = 2 # refer to input device id
CHUNK = 1024
RECORD_SECONDS = 5
WAVE_OUTPUT_FILENAME = "output.wav"
p = pyaudio.PyAudio()
stream = p.open(
rate=RESPEAKER_RATE,
format=p.get_format_from_width(RESPEAKER_WIDTH),
channels=RESPEAKER_CHANNELS,
input=True,
input_device_index=RESPEAKER_INDEX,)
print("* recording")
frames = []
for i in range(0, int(RESPEAKER_RATE / CHUNK * RECORD_SECONDS)):
data = stream.read(CHUNK)
frames.append(data)
print("* done recording")
stream.stop_stream()
stream.close()
p.terminate()
wf = wave.open(WAVE_OUTPUT_FILENAME, 'wb')
wf.setnchannels(RESPEAKER_CHANNELS)
wf.setsampwidth(p.get_sample_size(p.get_format_from_width(RESPEAKER_WIDTH)))
wf.setframerate(RESPEAKER_RATE)
wf.writeframes(b''.join(frames))
wf.close()
- Step 6. If you want to extract channel 0 data from 6 channels, please follow below code. For other channel X, please change [0::6] to [X::6].
import pyaudio
import wave
import numpy as np
RESPEAKER_RATE = 16000
RESPEAKER_CHANNELS = 6 # change base on firmwares, 1_channel_firmware.bin as 1 or 6_channels_firmware.bin as 6
RESPEAKER_WIDTH = 2
# run getDeviceInfo.py to get index
RESPEAKER_INDEX = 3 # refer to input device id
CHUNK = 1024
RECORD_SECONDS = 3
WAVE_OUTPUT_FILENAME = "output.wav"
p = pyaudio.PyAudio()
stream = p.open(
rate=RESPEAKER_RATE,
format=p.get_format_from_width(RESPEAKER_WIDTH),
channels=RESPEAKER_CHANNELS,
input=True,
input_device_index=RESPEAKER_INDEX,)
print("* recording")
frames = []
for i in range(0, int(RESPEAKER_RATE / CHUNK * RECORD_SECONDS)):
data = stream.read(CHUNK)
# extract channel 0 data from 6 channels, if you want to extract channel 1, please change to [1::6]
a = np.fromstring(data,dtype=np.int16)[0::6]
frames.append(a.tostring())
print("* done recording")
stream.stop_stream()
stream.close()
p.terminate()
wf = wave.open(WAVE_OUTPUT_FILENAME, 'wb')
wf.setnchannels(1)
wf.setsampwidth(p.get_sample_size(p.get_format_from_width(RESPEAKER_WIDTH)))
wf.setframerate(RESPEAKER_RATE)
wf.writeframes(b''.join(frames))
wf.close()
For Windows:
- Step 1. We run below command to install pyaudio.
pip install pyaudio
- Step 2. Use get_index.py to get device index.
C:\Users\XXX\Desktop>python get_index.py
Input Device id 0 - Microsoft Sound Mapper - Input
Input Device id 1 - ReSpeaker 4 Mic Array (UAC1.0)
Input Device id 2 - Internal Microphone (Conexant I)
- Step 3. Modify the device index and channels of record.py and then extract voice.
C:\Users\XXX\Desktop>python record.py
* recording
* done recording
If we see "Error: %1 is not a valid Win32 application.", please install Python Win32 version.
For MAC:
- Step 1. We run below command to install pyaudio.
pip install pyaudio
- Step 2. Use get_index.py to get device index.
MacBook-Air:Desktop XXX$ python get_index.py
Input Device id 0 - Built-in Microphone
Input Device id 2 - ReSpeaker 4 Mic Array (UAC1.0)
- Step 3. Modify the device index and channels of record.py and then extract voice.
MacBook-Air:Desktop XXX$ python record.py
2018-03-24 14:53:02.400 Python[2360:16629] 14:53:02.399 WARNING: 140: This application, or a library it uses, is using the deprecated Carbon Component Manager for hosting Audio Units. Support for this will be removed in a future release. Also, this makes the host incompatible with version 3 audio units. Please transition to the API's in AudioComponent.h.
* recording
* done recording
FAQ
Q1: Parameters of built-in algorithms
pi@raspberrypi:~/usb_4_mic_array $ python tuning.py -p
name type max min r/w info
-------------------------------
AECFREEZEONOFF int 1 0 rw Adaptive Echo Canceler updates inhibit.
0 = Adaptation enabled
1 = Freeze adaptation, filter only
AECNORM float 16 0.25 rw Limit on norm of AEC filter coefficients
AECPATHCHANGE int 1 0 ro AEC Path Change Detection.
0 = false (no path change detected)
1 = true (path change detected)
AECSILENCELEVEL float 1 1e-09 rw Threshold for signal detection in AEC [-inf .. 0] dBov (Default: -80dBov = 10log10(1x10-8))
AECSILENCEMODE int 1 0 ro AEC far-end silence detection status.
0 = false (signal detected)
1 = true (silence detected)
AGCDESIREDLEVEL float 0.99 1e-08 rw Target power level of the output signal.
[−inf .. 0] dBov (default: −23dBov = 10log10(0.005))
AGCGAIN float 1000 1 rw Current AGC gain factor.
[0 .. 60] dB (default: 0.0dB = 20log10(1.0))
AGCMAXGAIN float 1000 1 rw Maximum AGC gain factor.
[0 .. 60] dB (default 30dB = 20log10(31.6))
AGCONOFF int 1 0 rw Automatic Gain Control.
0 = OFF
1 = ON
AGCTIME float 1 0.1 rw Ramps-up / down time-constant in seconds.
CNIONOFF int 1 0 rw Comfort Noise Insertion.
0 = OFF
1 = ON
DOAANGLE int 359 0 ro DOA angle. Current value. Orientation depends on build configuration.
ECHOONOFF int 1 0 rw Echo suppression.
0 = OFF
1 = ON
FREEZEONOFF int 1 0 rw Adaptive beamformer updates.
0 = Adaptation enabled
1 = Freeze adaptation, filter only
FSBPATHCHANGE int 1 0 ro FSB Path Change Detection.
0 = false (no path change detected)
1 = true (path change detected)
FSBUPDATED int 1 0 ro FSB Update Decision.
0 = false (FSB was not updated)
1 = true (FSB was updated)
GAMMAVAD_SR float 1000 0 rw Set the threshold for voice activity detection.
[−inf .. 60] dB (default: 3.5dB 20log10(1.5))
GAMMA_E float 3 0 rw Over-subtraction factor of echo (direct and early components). min .. max attenuation
GAMMA_ENL float 5 0 rw Over-subtraction factor of non-linear echo. min .. max attenuation
GAMMA_ETAIL float 3 0 rw Over-subtraction factor of echo (tail components). min .. max attenuation
GAMMA_NN float 3 0 rw Over-subtraction factor of non- stationary noise. min .. max attenuation
GAMMA_NN_SR float 3 0 rw Over-subtraction factor of non-stationary noise for ASR.
[0.0 .. 3.0] (default: 1.1)
GAMMA_NS float 3 0 rw Over-subtraction factor of stationary noise. min .. max attenuation
GAMMA_NS_SR float 3 0 rw Over-subtraction factor of stationary noise for ASR.
[0.0 .. 3.0] (default: 1.0)
HPFONOFF int 3 0 rw High-pass Filter on microphone signals.
0 = OFF
1 = ON - 70 Hz cut-off
2 = ON - 125 Hz cut-off
3 = ON - 180 Hz cut-off
MIN_NN float 1 0 rw Gain-floor for non-stationary noise suppression.
[−inf .. 0] dB (default: −10dB = 20log10(0.3))
MIN_NN_SR float 1 0 rw Gain-floor for non-stationary noise suppression for ASR.
[−inf .. 0] dB (default: −10dB = 20log10(0.3))
MIN_NS float 1 0 rw Gain-floor for stationary noise suppression.
[−inf .. 0] dB (default: −16dB = 20log10(0.15))
MIN_NS_SR float 1 0 rw Gain-floor for stationary noise suppression for ASR.
[−inf .. 0] dB (default: −16dB = 20log10(0.15))
NLAEC_MODE int 2 0 rw Non-Linear AEC training mode.
0 = OFF
1 = ON - phase 1
2 = ON - phase 2
NLATTENONOFF int 1 0 rw Non-Linear echo attenuation.
0 = OFF
1 = ON
NONSTATNOISEONOFF int 1 0 rw Non-stationary noise suppression.
0 = OFF
1 = ON
NONSTATNOISEONOFF_SR int 1 0 rw Non-stationary noise suppression for ASR.
0 = OFF
1 = ON
RT60 float 0.9 0.25 ro Current RT60 estimate in seconds
RT60ONOFF int 1 0 rw RT60 Estimation for AES. 0 = OFF 1 = ON
SPEECHDETECTED int 1 0 ro Speech detection status.
0 = false (no speech detected)
1 = true (speech detected)
STATNOISEONOFF int 1 0 rw Stationary noise suppression.
0 = OFF
1 = ON
STATNOISEONOFF_SR int 1 0 rw Stationary noise suppression for ASR.
0 = OFF
1 = ON
TRANSIENTONOFF int 1 0 rw Transient echo suppression.
0 = OFF
1 = ON
VOICEACTIVITY int 1 0 ro VAD voice activity status.
0 = false (no voice activity)
1 = true (voice activity)
Q2: ImportError: No module named usb.core
A2: Run sudo pip install pyusb to install the pyusb.
pi@raspberrypi:~/usb_4_mic_array $ sudo python tuning.py DOAANGLE
Traceback (most recent call last):
File "tuning.py", line 5, in <module>
import usb.core
ImportError: No module named usb.core
pi@raspberrypi:~/usb_4_mic_array $ sudo pip install pyusb
Collecting pyusb
Downloading pyusb-1.0.2.tar.gz (54kB)
100% |████████████████████████████████| 61kB 101kB/s
Building wheels for collected packages: pyusb
Running setup.py bdist_wheel for pyusb ... done
Stored in directory: /root/.cache/pip/wheels/8b/7f/fe/baf08bc0dac02ba17f3c9120f5dd1cf74aec4c54463bc85cf9
Successfully built pyusb
Installing collected packages: pyusb
Successfully installed pyusb-1.0.2
pi@raspberrypi:~/usb_4_mic_array $ sudo python tuning.py DOAANGLE
DOAANGLE: 180
Q3: Do you have the example for Raspberry alexa application?
A3: Yes, we can connect the mic array v3.0 to raspberry usb port and follow Raspberry Pi Quick Start Guide with Script to do the voice interaction with alexa.
Q4: Do you have the example for Mic array v3.0 with ROS system?
A4: Yes, thanks for Yuki sharing the package for integrating ReSpeaker Mic Array v2 with ROS (Robot Operating System) Middleware.
Q5: How to enable 3.5mm audio port to receive the signal as well as usb port?
A5: Please download the new firmware and burn the XMOS by following How to update firmware.
Resource
- [PDF] ReSpeaker MicArray v3.0 Schematic
- [PDF] ReSpeaker MicArray v3.0 Product Brief
- [PDF] ReSpeaker MicArray v3.0 3D Model
- [SKP] ReSpeaker MicArray v3.0 3D Model
- [STP] ReSpeaker MicArray v3.0 3D Model
- [PDF] XVF3000 Product Brief
- [PDF] XVF3000 Datasheet
- [Github] ReSpeaker Mic Array v2 with ROS (Robot Operating System) Middleware
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.