How to use RoboSense LiDAR on reComputer
Introduction
RoboSense LiDAR sensors provide high-precision 3D point cloud data for various applications. This guide focuses on setting up the RS32 model on a reComputer J30/40 device running ROS Noetic.
This wiki provides a step-by-step guide to install and set up RoboSense LiDAR on reComputer J30/40 Jetson using ROS, and visualize point cloud data.
Prerequisites
-
reComputer J30/40 series: Already completed the installation of the JetPack 5.x system and the ROS Noetic environment according to the tutorial.
-
RoboSense all series lidar

Getting Started
Install Robosense SDK
-
Step 1: Install Basic Dependencies
sudo apt-get update &&
sudo apt-get install -y libyaml-cpp-dev libpcap-dev -
Step 2: Create Workspace
mkdir -p catkin_ws/src
cd catkin_ws/src -
Step 3: Clone the rslidar_sdk
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update -
Step 4: Open the CMakeLists.txt file located at catkin_ws/src/rslidar_sdk/CMakeLists.txt and change the variable COMPILE_METHOD at the top of the file to CATKIN.

-
Step 4: Delete the existing package.xml file located in the catkin_ws/src/rslidar_sdk/ directory,Rename the package_ros1.xml file to package.xml.

-
Step 5: Enter the Following Commands in the Terminal
cd ~/catkin_ws/src/rslidar_sdk/
mkdir build && cd build
cmake .. && make -j4
cd ~/catkin_ws/
catkin_make
Connect Hardware
- Step 1: Connect the power supply, Robosense RS32 LiDAR, interface box, and Ethernet cable to the reComputer J4012 as described below:
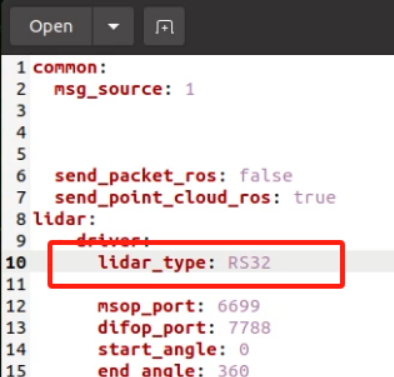
- Step 2: Open the config.yaml file located at /catkin_ws/src/rslidar_sdk/config/config.yaml and change the lidar_type on line 10 to RS32. Save the file and close it. Ensure you fill in the correct LiDAR model according to your device.
Configure reComputer IP Address
The default IP address for the Robosense RS32 LiDAR is 192.168.1.200, the target host machine IP address is 192.168.1.102, the MSOP packet port number is 6699, and the DIFOP packet port number is 7788. After connecting the hardware, you need to manually configure the IP address of the reComputer.
-
Step 1: Open Ethernet Settings.

-
Step 2: Select Manual Settings in the IPv4 field and enter the IP address 192.168.1.102 and mask 255.255.255.0.

ping 192.168.1.200
If you receive data from the LiDAR, it indicates a successful connection.
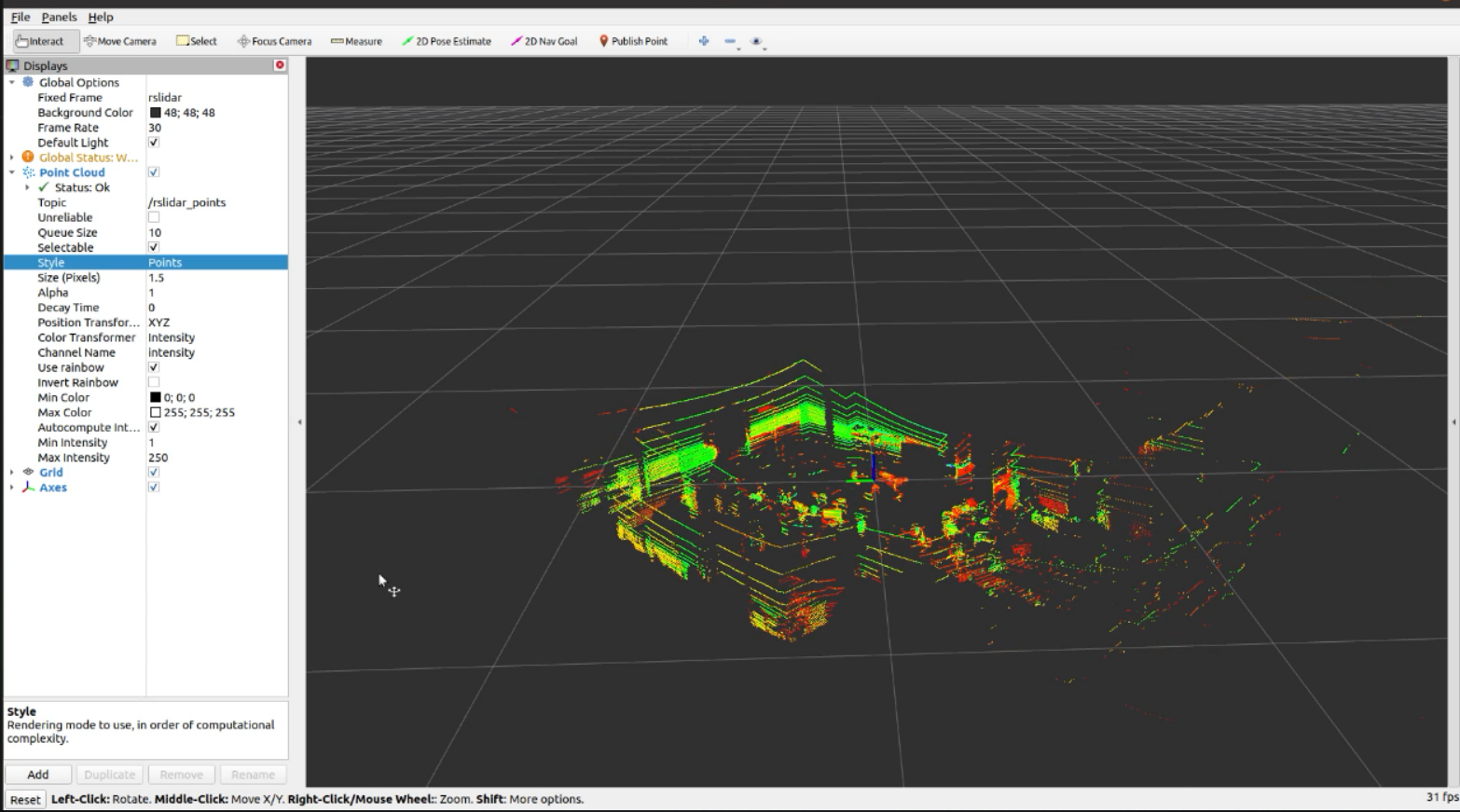
Running Lidar Code
cd ~/catkin_ws/
source devel/setup.bash
roslaunch rslidar_sdk start.launch
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.