Robotics J501 carrier board Hardware and Getting Started
The reComputer Robotics J501 Mini is a compact, high-performance edge AI carrier board designed for advanced robotics. Compatible with NVIDIA Jetson AGX Orin modules (32GB/64GB) in MAXN mode, it delivers up to 275 TOPS of AI performance. Equipped with extensive connectivity options—including dual Gigabit Ethernet ports, M.2 slots for 5G and Wi-Fi/BT modules, 2 USB 3.2 ports, CAN, GMSL2 (via optional expansion), I2C, and UART—it serves as a powerful robotic brain capable of processing complex data from various sensors. Pre-installed with JetPack 6.2.1 and Linux BSP, it ensures seamless deployment.
Supporting frameworks like NVIDIA Isaac ROS, Hugging Face, PyTorch, and ROS 2/1, the reComputer Robotics J501 Mini bridges large language model-driven decision-making with physical robotics control, such as motion planning and sensor fusion. Ideal for the rapid development of autonomous robots, it accelerates time-to-market with ready-to-use interfaces and optimized AI frameworks.

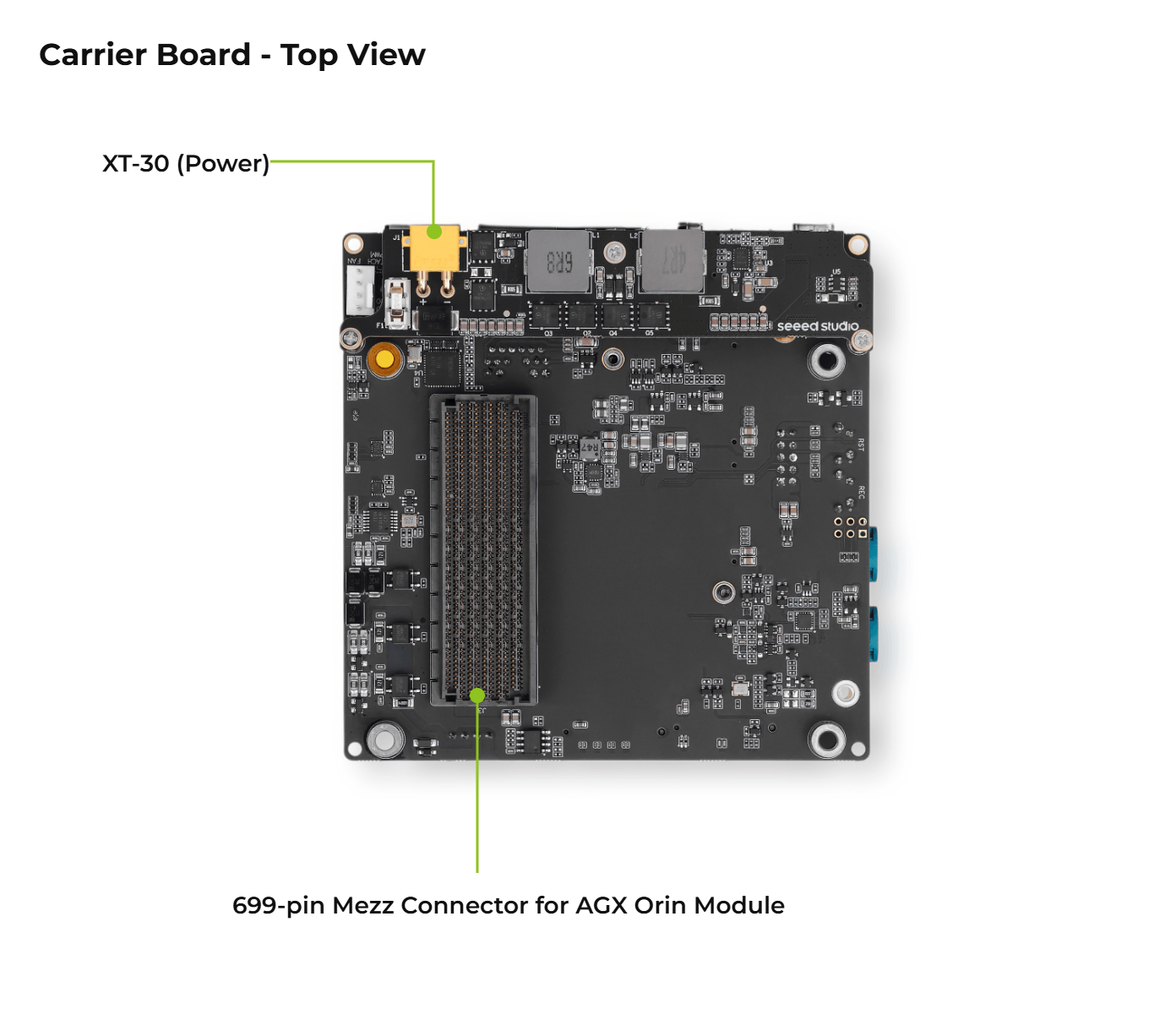
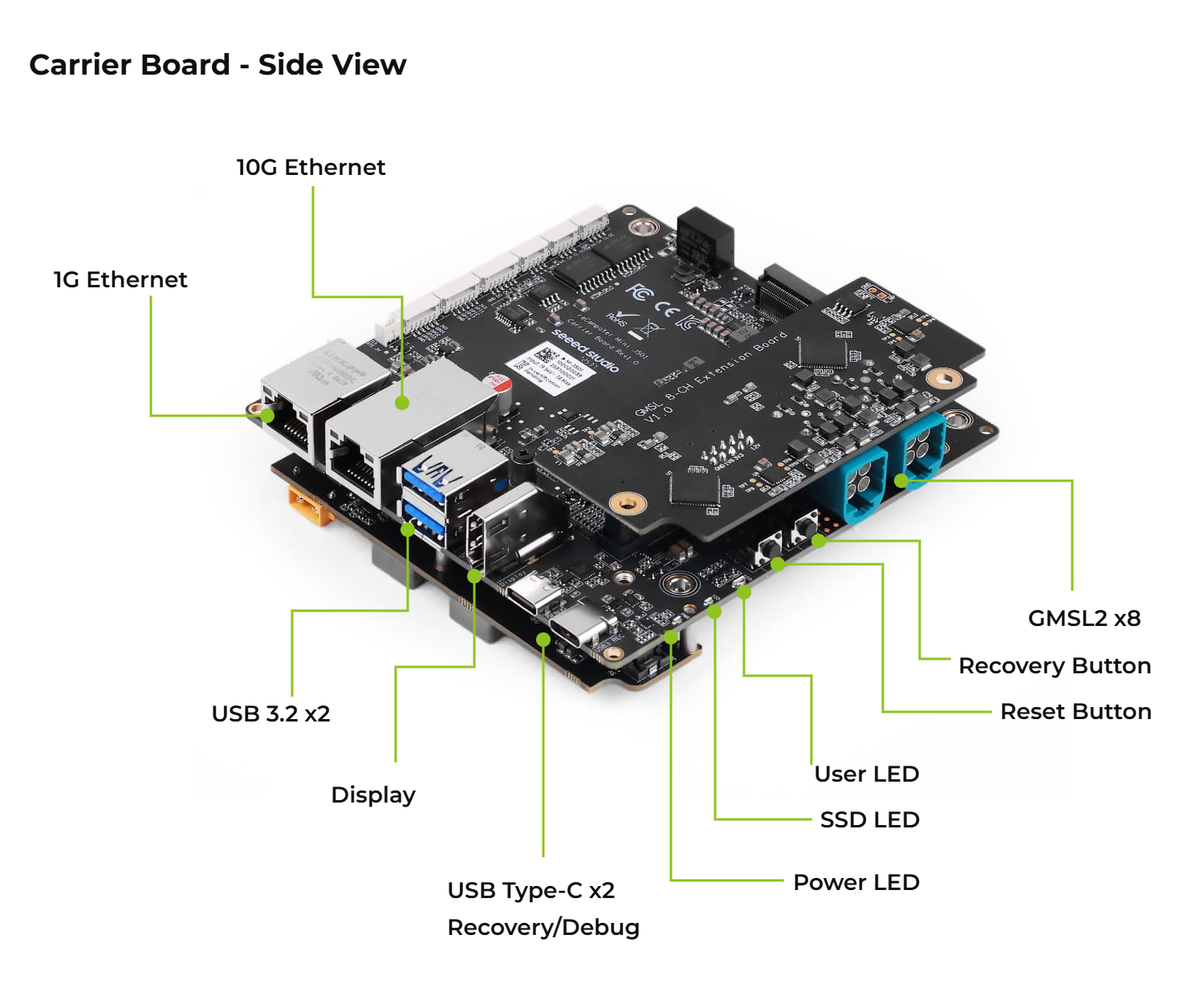
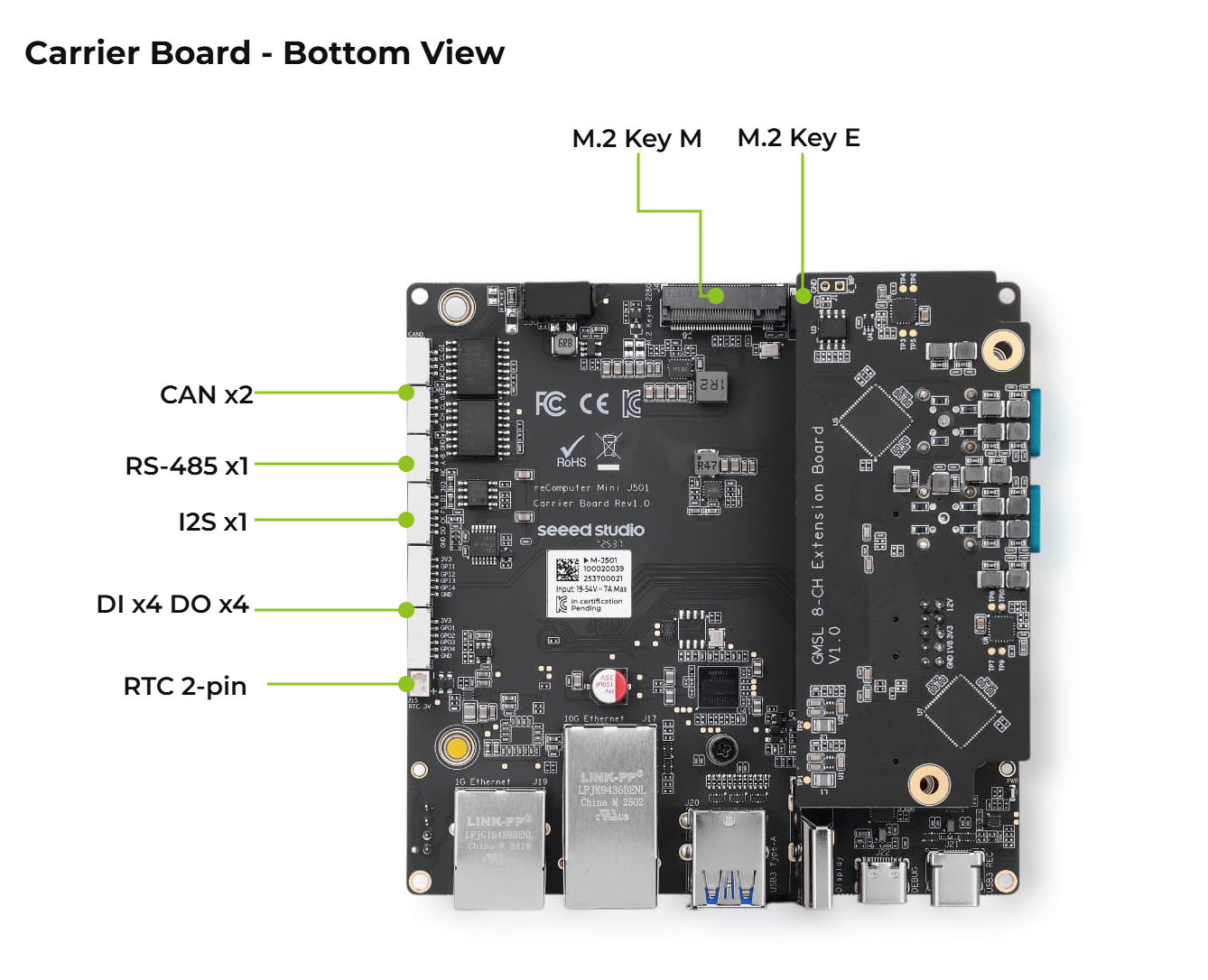
reComputer Jetson Robotics J501-Mini Carrier Board overview
| Top View |
|---|
 |
| side View |
 |
| bottom View |
 |
📝 Part List
- reComputer Robotics J501-Mini Carrier Board x 1
- Power Supply and JST expansion board x 1
- XT30 to DC cable x 1
- USB Cable, Type A to Type C x 1
- Heat Sink for expansion board x 1
- Stud(M3*30) x 5
- M3 Hexagon nut x 5
- Screw(CM2.5*L.4) for Jetson Module and M.2 Key M x3
- Screw(CM2*3.0) for M.2 Key E x1
- Stud(M2*2.0) for M.2 Key B x1
- Screw(CM3*4.0) for M.2 Key B x1
- User Manual x 1
1.Please design a robust heat dissipation solution according to the Thermal Design Guide, when in high voltage power supply and operating temperature. 2.Please attach heat sink for module for better performance. 3.During the operation with high voltage input and high load, please do not touch the heat sink to prevent scalding. 4.Power Adapter Recommendation for Validation, please use the power adapter recommended on the Seeed official website.
- 19V/4.74A 5525 Barrel Jack Power Adapter
- Ensure maximum power consumption requirements are met. 2.AC Power Cord Compatibility
- Purchase region-specific AC cloverleaf power cords according to your location. 3.Accessory Compatibility
- Use only officially recommended accessories (e.g., wireless modules, cameras, peripherals) for optimal performance and compatibility.
🔍 Specification
Carrier Board Specifications
| Category | Item | Details |
|---|---|---|
| Storage | M.2 KEY M PCIe | 1x M.2 KEY M PCIe (M.2 NVMe 2280 SSD) |
| Networking | M.2 KEY E | 1x M.2 Key E for WiFi/Bluetooth module |
| Ethernet | 1x RJ45 10GbE && 1x RJ45 1GbE | |
| I/O | USB | 2x USB 3.2 Type-A (10Gbps); 1x USB 2.0 Type C (Debug); 1x USB 3.0 Type C (Recovery/Debug) |
| Camera | 2x 4 in 1 GMSL2 Mini-Fakra Connector (Optional); | |
| CAN | 2x CAN JST 4-Pin Connector(GH 1.25); | |
| DI/DO | 1x DI JST 5-Pin Connector(GH 1.25); 1x DO JST 5-Pin Connector(GH 1.25); | |
| I2S | 1x I2S JST 5-Pin Connector(GH 1.25) | |
| RS485 | 1x RS-485 JST 4-Pin Connector(GH 1.25) | |
| UART | 1x UART JST 4-Pin Connector (Multiplexed with DI) | |
| Display | 1x HDMI 2.1 | |
| Fan | 1x 4 Pin Fan Connector(12V PWM) | |
| Extension Port | 2x Camera Expansion Header (for GMSL2 board) | |
| RTC | 1x RTC 2-pin; | |
| LED | 1x PWR LED, Green; 1x SSD LED, Green; 1x USR LED, RGB | |
| Button | 1x Recovery Button; 1x RESET Button | |
| Power | 19-54V XT30(2+2) (XT30 to 5525 DC Jack Cable included) | |
| Jetpack Version | Jetpack 6.2.1 | |
| Mechanical | Dimensions (W x D x H) | 115mm x 115mm x 38mm |
| Weight | 200g | |
| Installation | Desk, Wall-mounting | |
| Operating Temperature | -20℃~60℃ (25W Mode); -20℃~55℃ (MAXN Mode); (with reComputer Robotics heat sink with fan) | |
| Warranty | 2 Years | |
| Certification | RoHS, REACH, CE, FCC, UKCA, KC | |
📦 Flash JetPack OS
Supported Module
Prerequisites
- Ubuntu host PC
- Robotics J501 Mini Carrier Board
- NVIDIA® Jetson AGX Orin Module
- Nano/NX Module Active Fan
- NVMe M.2 2280 Internal SSD
- USB Type-C data transmission cable
We recommend that you use physical ubuntu host devices instead of virtual machines. Please refer to the table below to prepare the host machine.
| JetPack Version | Ubuntu Version (Host Computer) | ||
| 18.04 | 20.04 | 22.04 | |
| JetPack 6.x | ✅ | ✅ | |
Prepare the Jetpack Image
Here, we need to download the system image to our Ubuntu PC corresponding to the Jetson module we are using:
| Jetpack Version | Jetson Module | GMSL | Download Link1 | SHA256 |
|---|---|---|---|---|
| 6.2.1 | AGX Orin 64GB | ✅ | Download | c63d1219531245abecc7bbdcafc73d3 4f75547454c7af85de40f08396a87e5ee |
| AGX Orin 32GB | ✅ | Download | 5d1f3cd28eb44ca60132c87ccce5aca f806ee945b486df9061a34de73fbb582b |
The Jetpack6 image file is approximately 14.2GB in size and should take around 60 minutes to download. Please kindly wait for the download to complete.
To verify the integrity of the downloaded firmware, you can compare the SHA256 hash value.
On an Ubuntu host machine, open the terminal and run the command sha256sum <File> to obtain the SHA256 hash value of the downloaded file. If the resulting hash matches the SHA256 hash provided in the wiki, it confirms that the firmware you downloaded is complete and intact.
⚙️ All .dts files and other source code for SEEED's Jetson carrier boards can be downloaded from Linux_for_Tegra
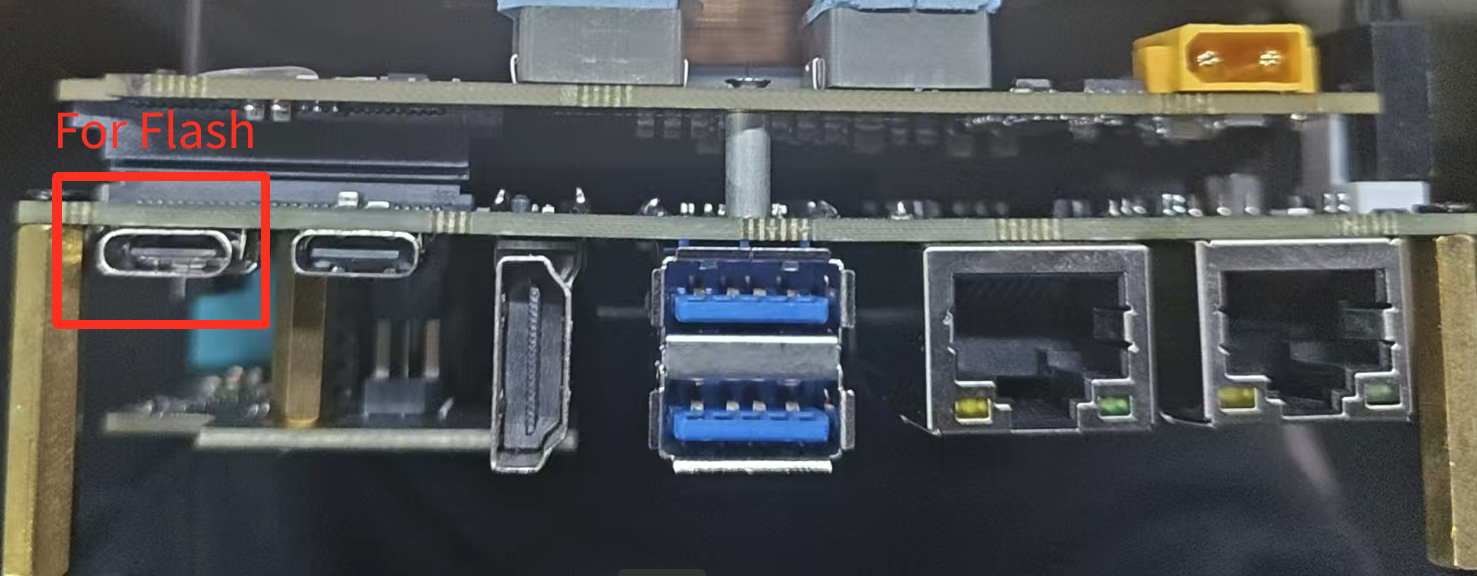
Enter Force Recovery Mode
Before we can move on to the installation steps, we need to make sure that the board is in force recovery mode.
Step-by-Step
Step 1. Keep pressing button to the RESET mode.

Step 2. Power up the carrier board by connecting the power cable, then release REST button .
Step 3. Connect the board to the Ubuntu host PC with a USB Type-C data transmission cable.
Step 4. On the Linux host PC, open a Terminal window and enter the command lsusb. If the returned content has one of the following outputs according to the Jetson SoM you use, then the board is in force recovery mode.
- For AGX Orin 32GB: 0955:7223 NVidia Corp
- For AGX Orin 64GB: 0955:7023 NVidia Corp
The below image is for AGX Orin 32GB:

Flash to Jetson
Step 1: Extract the downloaded image file:
cd <path-to-image>
sudo tar xpf mfi_xxxx.tar.gz
# For example: sudo tar xpf mfi_recomputer-mini-agx-orin-32g-j501-6.2.1-36.4.4-2025-09-08.tar.gz
Step 2: Execute the following command to flash jetpack system to the NVMe SSD:
cd mfi_xxxx
# For example: cd mfi_recomputer-orin-robotics-j501
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
You will see the following output if the flashing process is successful

The flash command may run for 2-10 minutes.
Step 3: Connect the Robotics J501-Mini to a display use the PD to HDMI adapter to connect to a display that supports HDMI input, or directly connect to a display that supports PD input using the PD cable, and finish the initial configuration setup:

Please complete the System Configuration according to your needs.
🔌 Interfaces Usage
The following will introduce the various interfaces of the Robotics j501-Mini board and how to use them.
M.2 Key M
M.2 Key M is designed for high-speed NVMe SSDs, providing ultra-fast data transfer for robotics applications.
Supported SSD are as follows
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
Hardware Connection
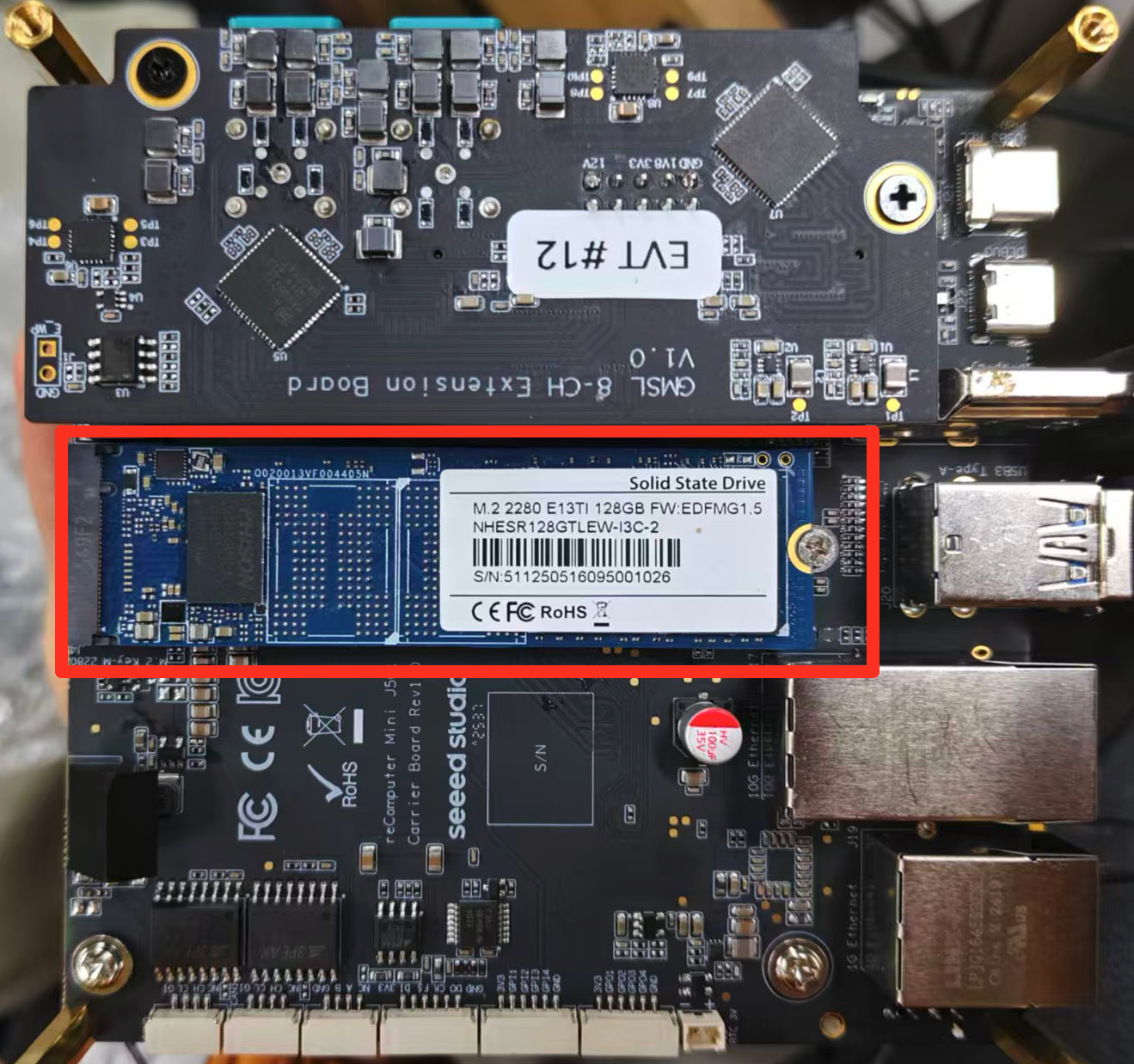
Usage Instruction
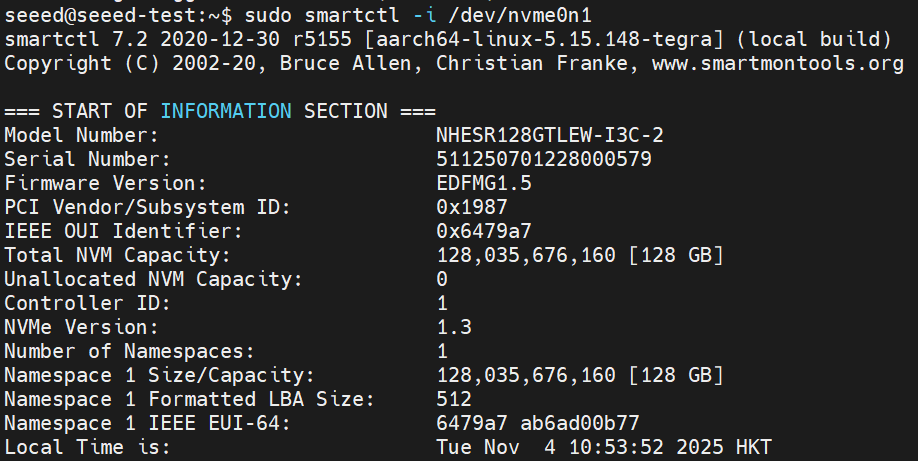
Before testing the SSD read/write speed, you need to enter the following in the Jetson terminal:
sudo apt update
sudo apt install smartmontools
sudo smartctl -i /dev/nvme0n1
Create a script file to test SSD read/write speed:
#You need to create a blank test file first
cat <<'EOF' | sudo tee test_nvme.sh >/dev/null
#!/usr/bin/env bash
set -e
sudo dd if=/dev/zero of=test bs=1000M count=1 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
sudo dd if=test of=/dev/null bs=1000M count=1
sudo rm -rf test
EOF
Run the script to test SSD read/write speed:
sudo chmod +x test_nvme.sh
./test_nvme

M.2 Key E
The M.2 Key E interface is a standard M.2 connector primarily used for connecting wireless modules, such as Wi-Fi and Bluetooth, to expand wireless communication capabilities.
Hardware Connection
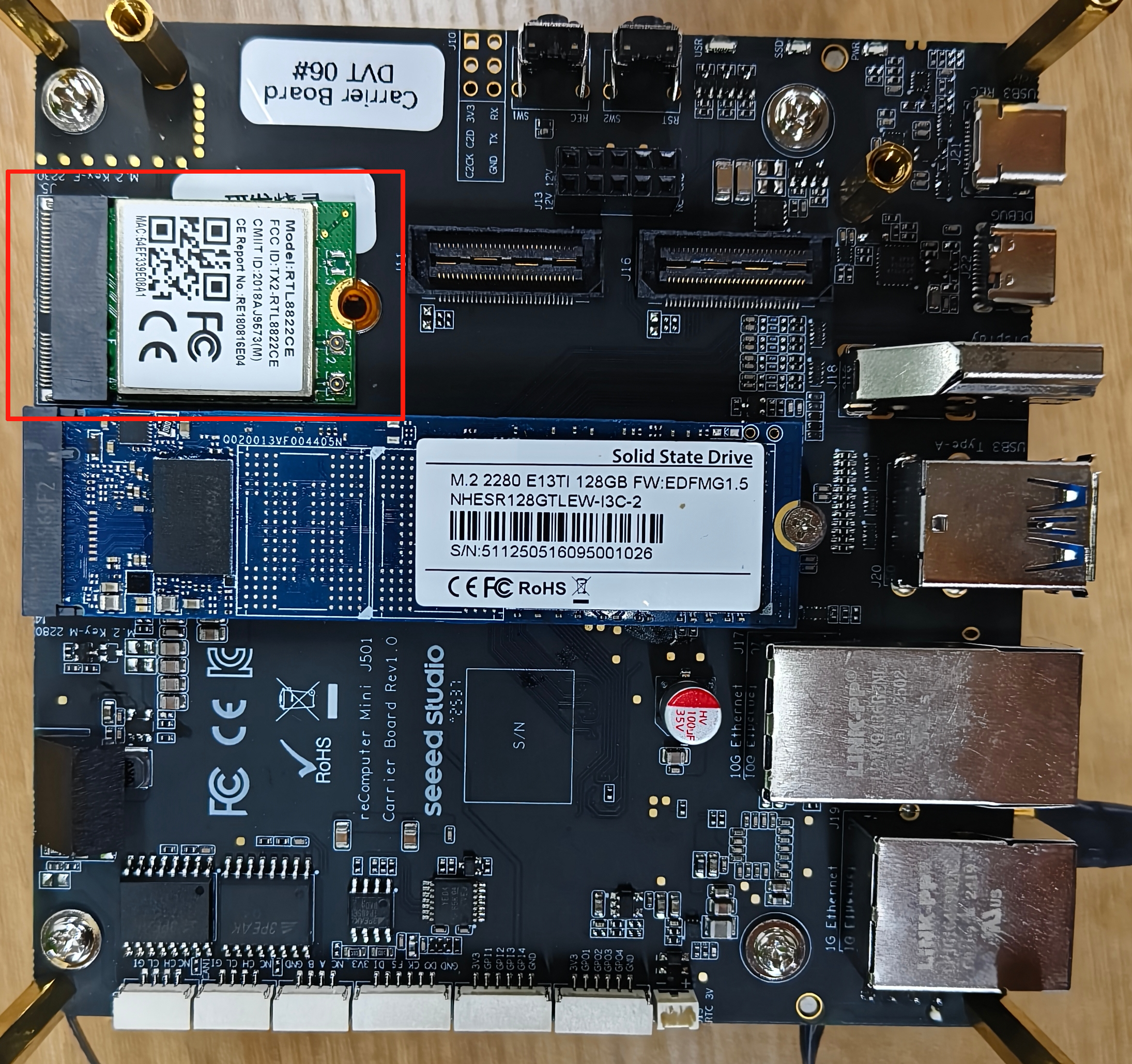
Usage Instruction
To test Wi-Fi performance, use the following command (replace the IP address with your test server):
iperf3 -c 192.168.6.191

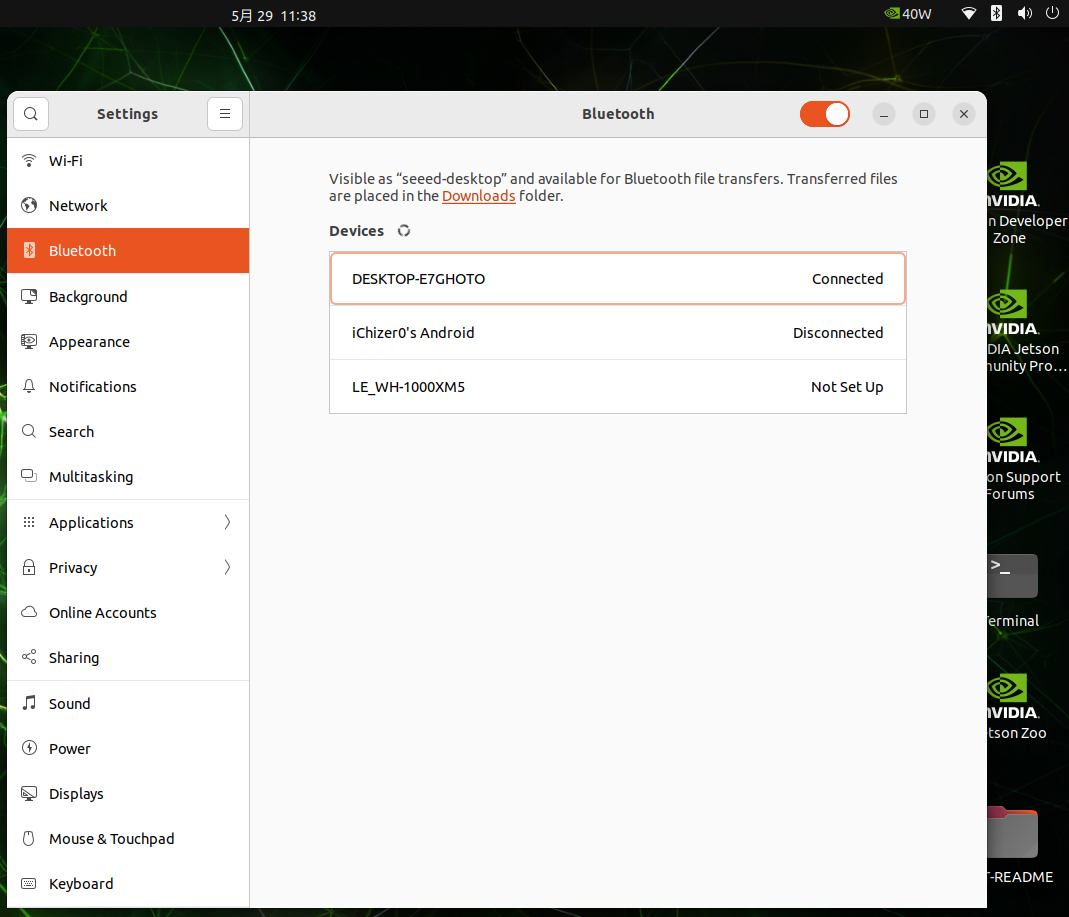
Bluetooth functionality is available via the M.2 Key E slot.
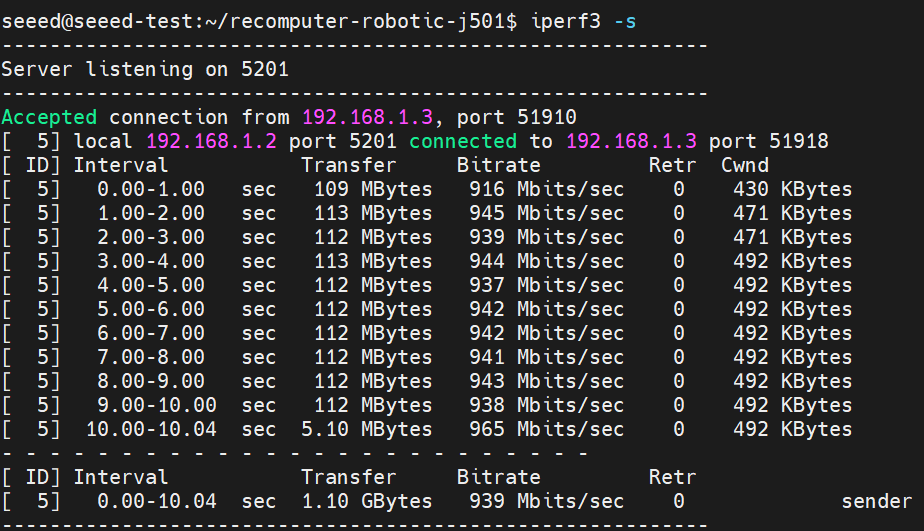
Ethernet
The Robotics j501-Mini carrier board features 2 1Gbps RJ45 Ethernet ports for high-speed wired network connectivity.
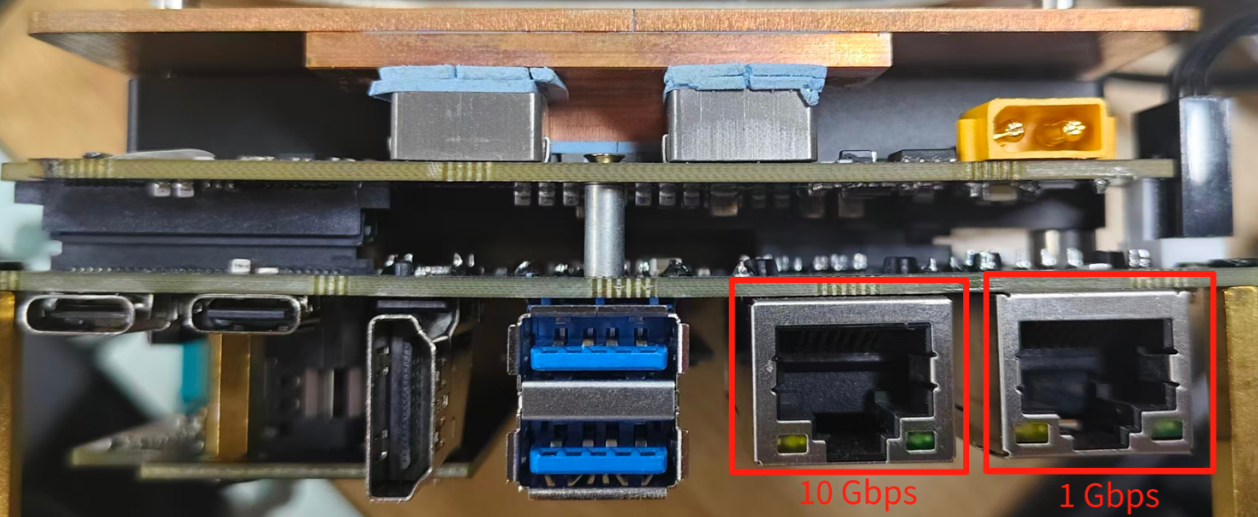
To test Ethernet port speed, use iperf3 as follows :
iperf3 -c <server_ip> -B <bind_ip>
<server_ip> is the IP address of the iperf3 server. The client will connect to this server to perform a bandwidth test.
<bind_ip> binds the specified local IP address as the source of the test traffic.
LED
The J501 mini has two LEDs that can be controlled. The following demonstrates how to control the LEDs to be green, red, or blue.
Usage Instruction
The reference commands for controlling the LEDs are as follows:
#change to red
echo 1 | sudo tee /sys/class/leds/on-board:red/brightness
echo 0 | sudo tee /sys/class/leds/on-board:red/brightness
#change to green
echo 1 | sudo tee /sys/class/leds/on-board:green/brightness
echo 0 | sudo tee /sys/class/leds/on-board:green/brightness
#change to blue
echo 1 | sudo tee /sys/class/leds/on-board:blue/brightness
echo 0 | sudo tee /sys/class/leds/on-board:blue/brightness
The LED control effect is shown in the figure below:



USB
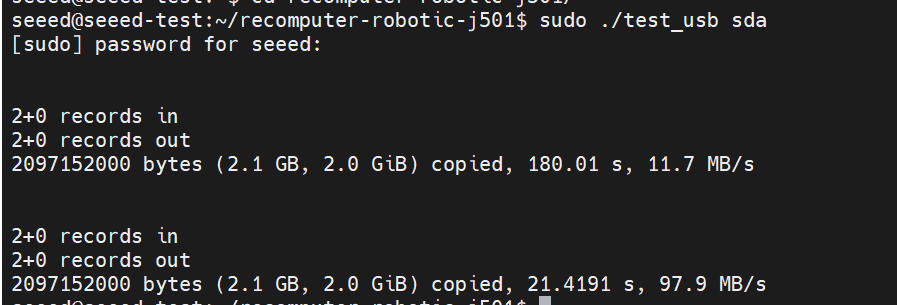
The Robotics j501-Mini carrier board is equipped with a variety of USB ports, including 2 USB 3.2 Type-A ports (10Gbps), a USB 3.0 Type-C port , and a USB 2.0 Type-C port for device mode/debugging, offering versatile connectivity options.
USB-A Speed Test
Create a script to test USB device speed:
sudo vim test_usb
Paste the following content:
cat <<'EOF' | sudo tee test_usb.sh >/dev/null
#!/bin/bash
sudo dd if=/dev/zero of=/dev/$1 bs=1000M count=2 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
sudo dd if=/dev/$1 of=/dev/null bs=1000M count=2
EOF
Make the script executable and test:
sudo chmod +x test_usb
./test_usb
USB 2.0 Type-C port
Using this serial port, via the USB-C data cable, you can monitor the debugging information of input and output on the PC side.
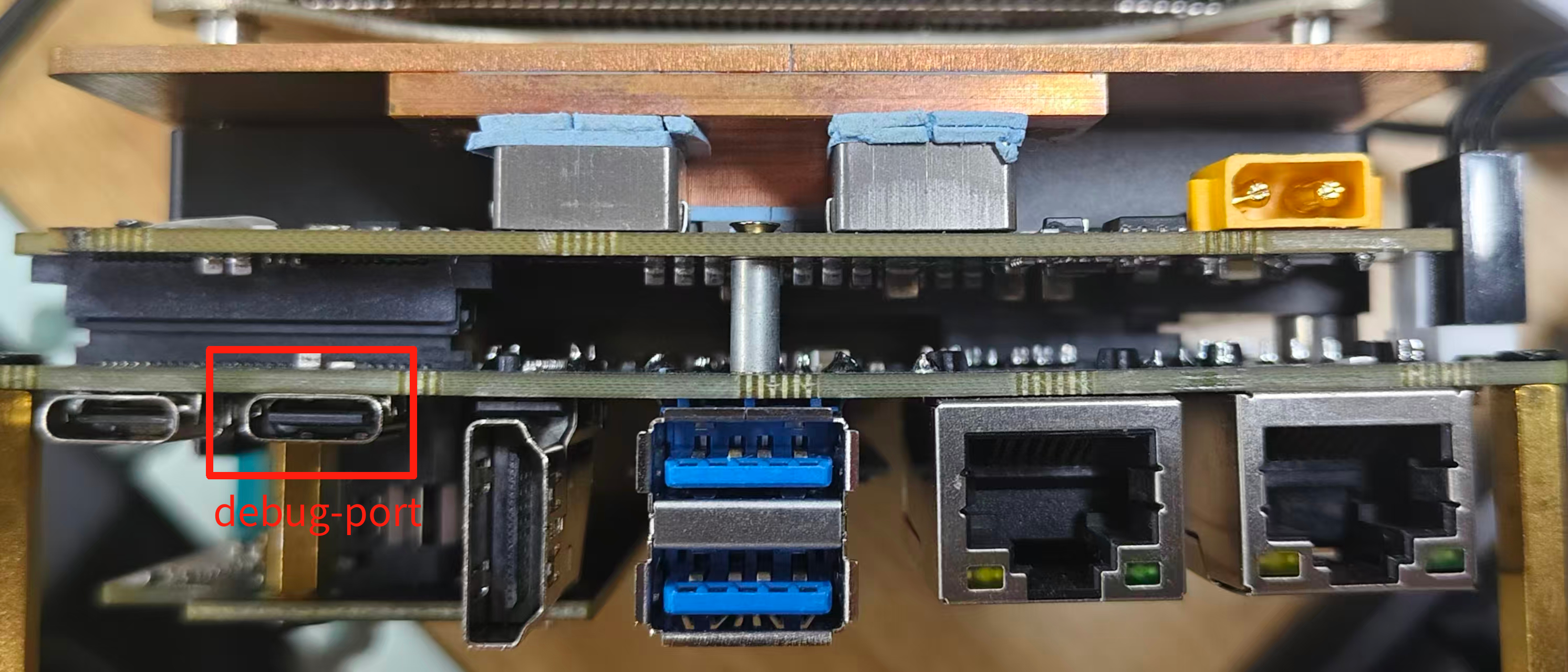
On your PC (not the Jetson), install a serial port login tool and log in to /dev/ttyUSB0 (it might also be ttyUSB1, 2):
sudo apt update
sudo apt install screen
screen /dev/ttyUSB0 115200
You can then control the Jetson's terminal via the serial port on another Linux host, as shown below:
Fan
The reComputer Jetson Robotics j501-Mini is equipped with:
- 1x 4-Pin Fan Connector (12V PWM): Compatible with standard 12V PWM fans, it also supports precise speed control, making it ideal for high-performance cooling requirements.
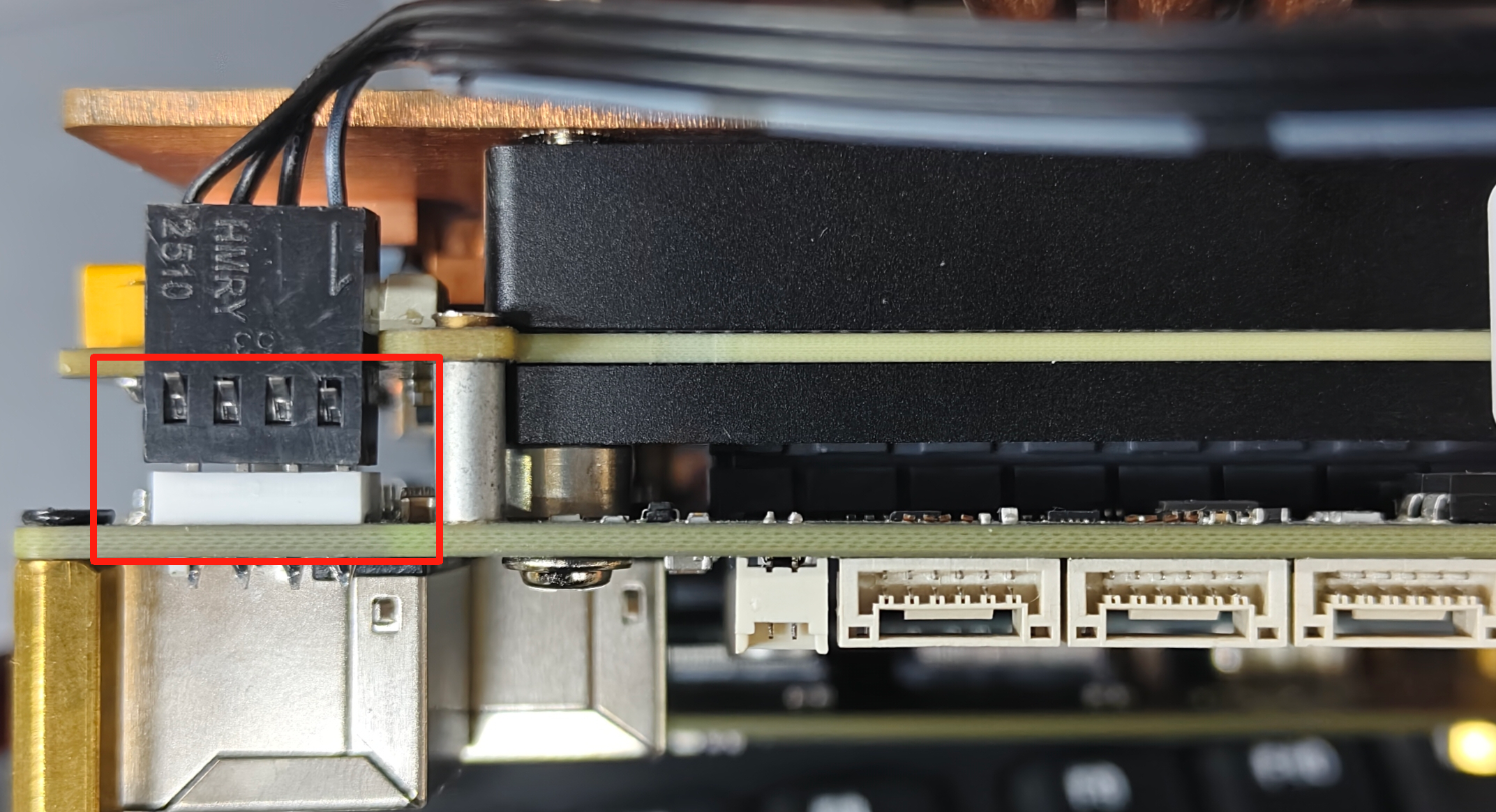
Hardware Connection
The Robotics J501 Mini provides a standard 4-pin header for Fan.
The Fan datasheet schematic is shown below:
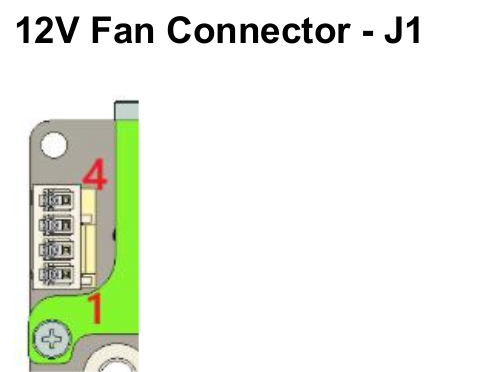
The pin definitions for J1 are as follows:
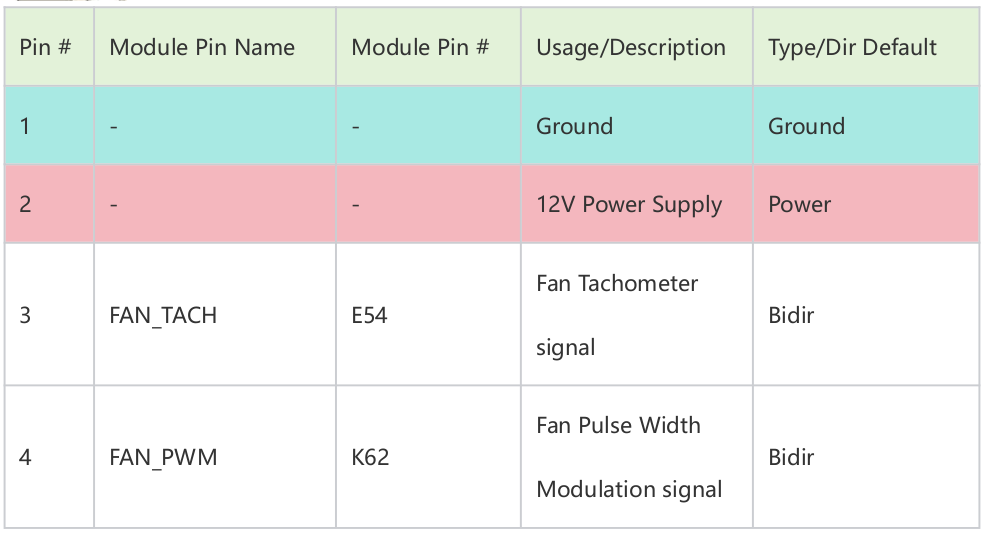
For more information, please check here.
Usage Instruction
Create a script to set fan speed:
cat test_fanSpeedSet
Paste the following content:
#!/bin/bash
sudo systemctl stop nvfancontrol
sleep 2
echo "000000" | sudo -S chmod 777 /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
echo $1 > /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
Additionally, we can manually set the fan speed using the jtop tool.
CAN
CAN (Controller Area Network) is a robust vehicle bus standard that enables microcontrollers and devices to communicate with each other without a host computer.
The J501 Mini provides two CAN interfaces integrated into the JST 4-pin(GH1.25). Additionally, both CAN interfaces support CAN-FD, with CAN0 and CAN1 shown below:
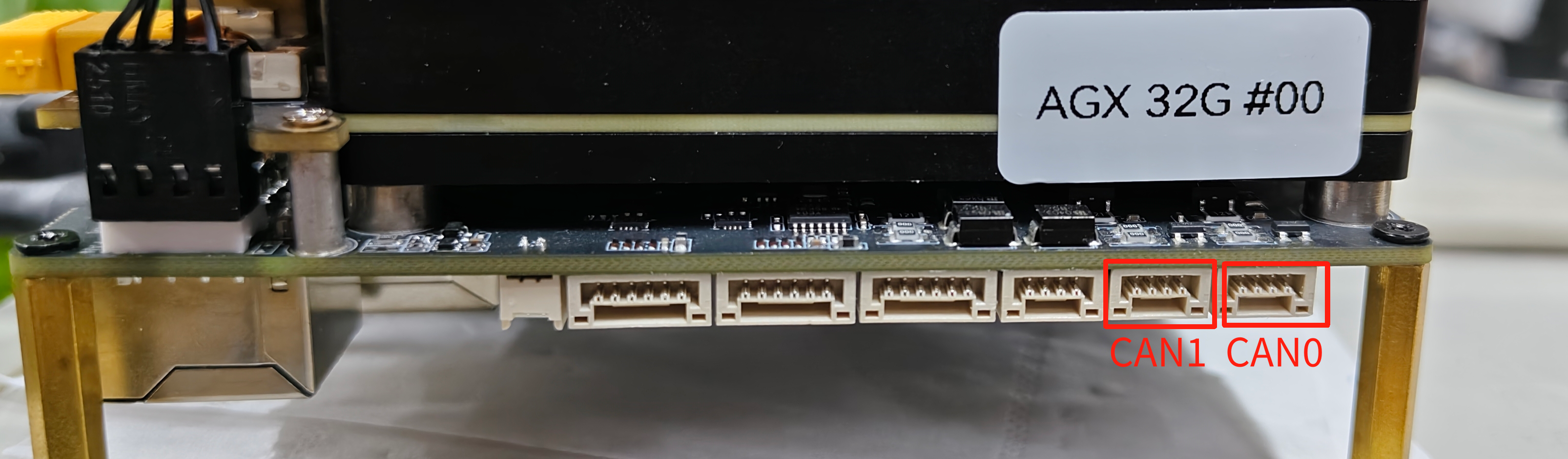
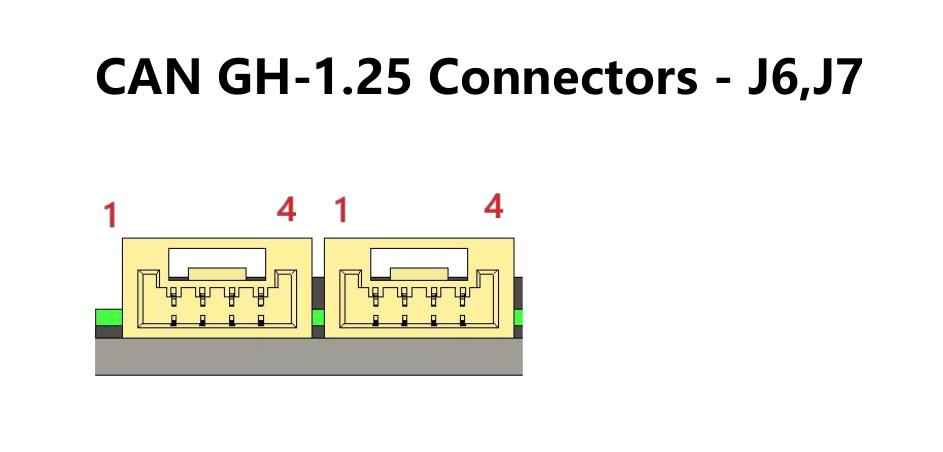
The pinout definitions for CAN0 and CAN1 are similar, and the interface diagram is shown below:
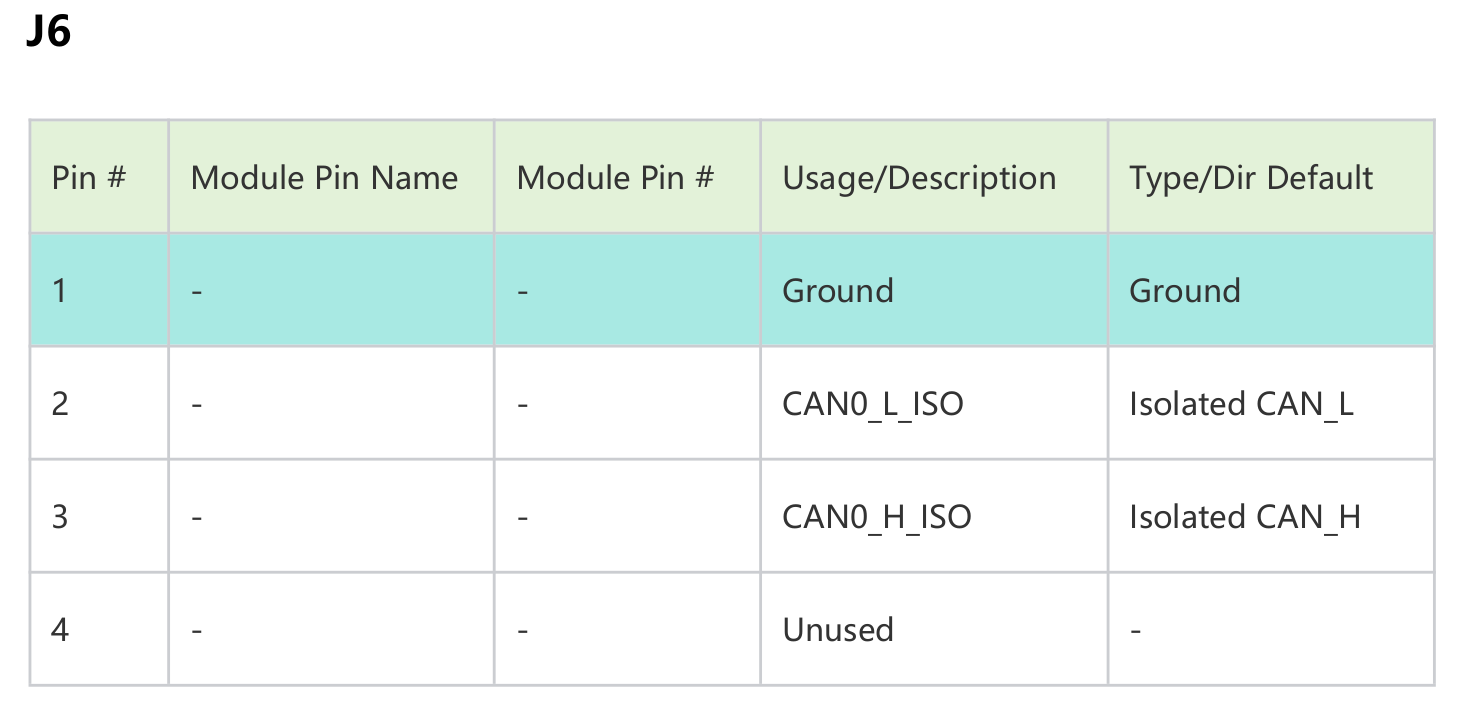
CAN0 corresponds to J6, and the pin definitions are as follows:
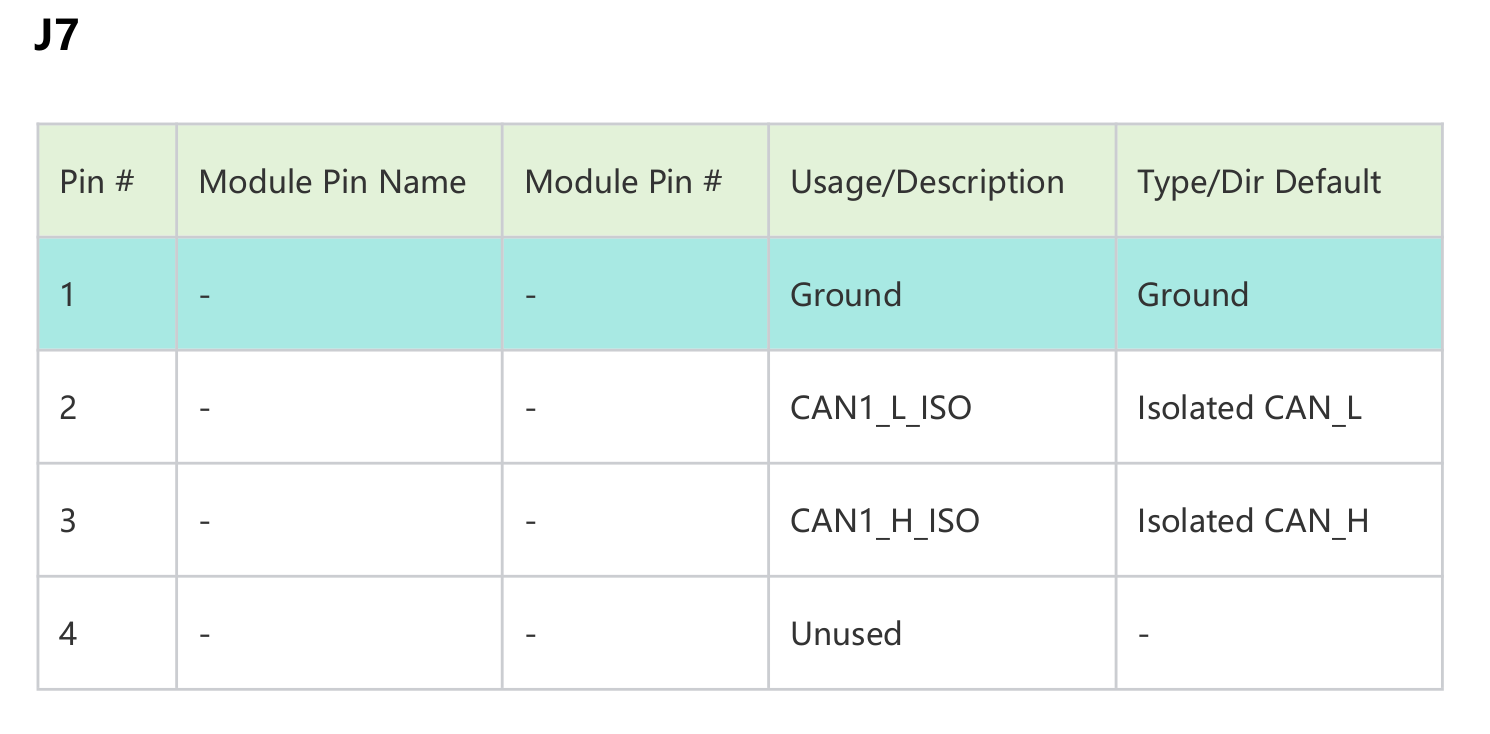
CAN1 corresponds to J7, and the pin definitions are as follows:
CAN Communication
This section connects CAN0 and CAN1 on the Jetson to demonstrate how to send and receive data between CAN0 and CAN1 in Classic CAN mode and CAN-FD mode.
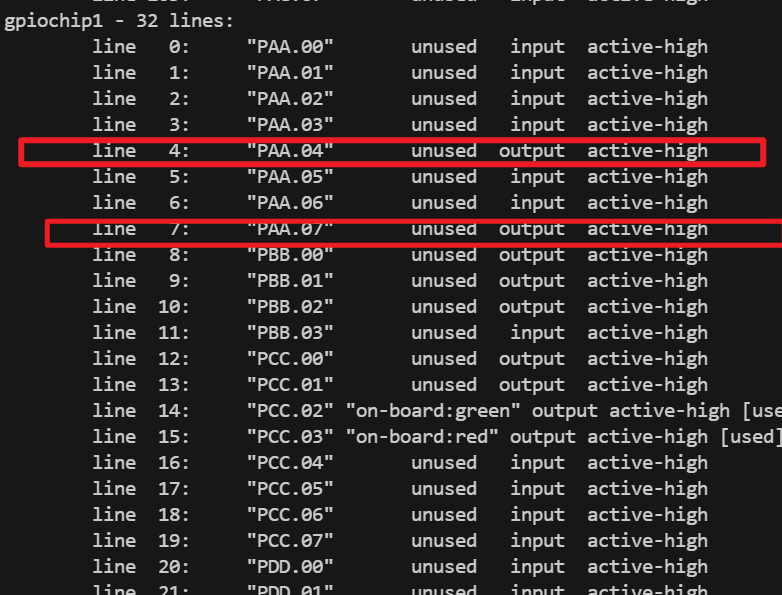
The termination resistors for CAN0 and CAN1 can be controlled via two pins: PAA.04, located at gpiochip1 line4, and PAA.07, located at gpiochip1 line7.
Termination resistor control follows these rules:
When `PAA.04 = 1`, the 120 Ω termination resistor of CAN0 is **disconnected**;
when `PAA.04 = 0`, the 120 Ω termination resistor of CAN0 is **connected**.
When `PAA.07 = 1`, the 120 Ω termination resistor of CAN1 is **disconnected**;
when `PAA.07 = 0`, the 120 Ω termination resistor of CAN1 is **connected**.
Enter the following command to view the pins on gpiochip 1:
gpioinfo gpiochip1
Refer to the following commands to set PAA.04 and PAA.07 to 0:
sudo gpioset --mode=wait gpiochip1 4=0
sudo gpioset --mode=wait gpiochip1 7=0
Refer to the following commands to set PAA.04 and PAA.07 to 1:
sudo gpioset --mode=wait gpiochip1 4=1
sudo gpioset --mode=wait gpiochip1 7=1
Classic CAN mode
Create test_can.sh to test data transmission and reception between CAN0 and CAN1 in standard mode:
touch test_can.sh
chmod +x test_can.sh
./tets_can.sh
The script code for test_can.sh is as follows:
test_can.sh
#!/bin/bash
echo "000000" | sudo -S ip link set can0 down
echo "000000" | sudo -S ip link set can1 down
# set buffer size
echo "000000" | sudo -S sysctl -w net.core.rmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.rmem_default=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_default=524288
#set to 2M bps
echo "000000" | sudo -S ip link set can0 type can bitrate 2000000
echo "000000" | sudo -S ip link set can0 up
echo "000000" | sudo -S ip link set can1 type can bitrate 2000000
echo "000000" | sudo -S ip link set can1 up
sleep 2
#Enable 5s to test
sudo pkill -f gpioset
gpioset --mode=time --sec=200000 gpiochip1 7=0 &
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip1 4=0 &
GPIO2_PID=$!
cangen can1 &
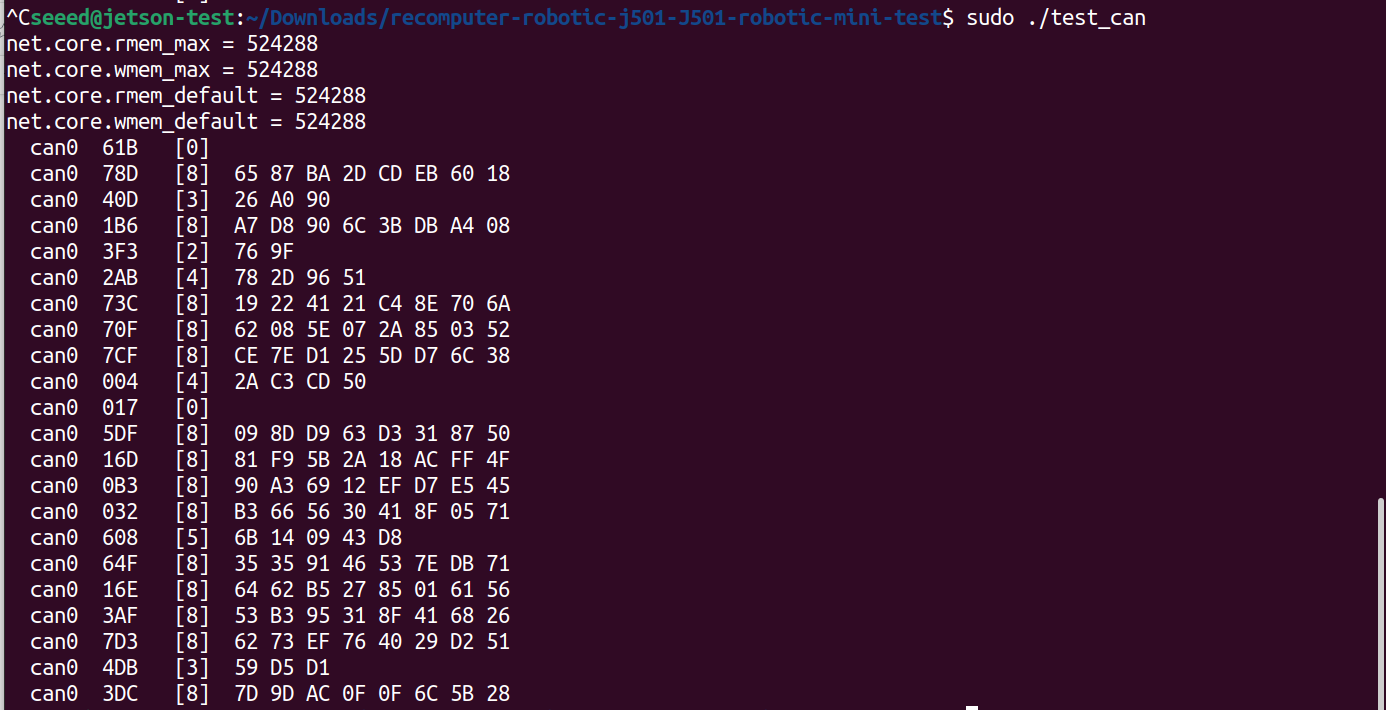
candump can0
Data transmission and reception between CAN0 and CAN1 will be completed:
CAN-FD mode
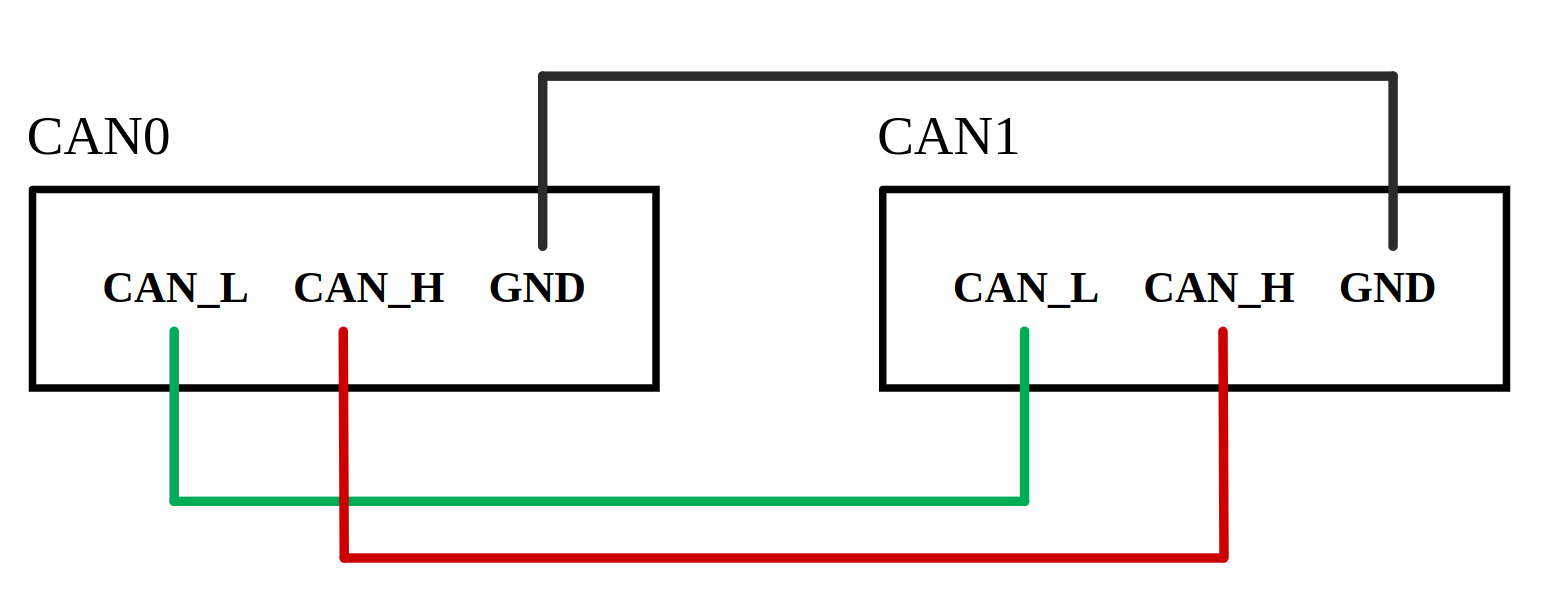
In the datasheet, you can find the wiring diagram for the CAN0/CAN1 interface as shown below:
Create test_canfd.sh to test data transmission and reception between CAN0 and CAN1 in CAN-FD mode:
touch test_canfd.sh
chmod +x test_can.sh
./tets_can.sh
The script code for test_canfdfd.sh is as follows:
test_canfd.sh
#!/bin/bash
# configure CAN FD mode
#CAN bus rate set to 500 kbps, data rate set to 5 Mbps.
echo "000000" | sudo -S ip link set can0 down
echo "000000" | sudo -S sudo ip link set can0 type can bitrate 500000 dbitrate 5000000 berr-reporting on fd on restart-ms 100
echo "000000" | sudo -S ip link set can0 up
echo "000000" | sudo -S ip link set can1 down
echo "000000" | sudo -S sudo ip link set can1 type can bitrate 500000 dbitrate 5000000 berr-reporting on fd on restart-ms 100
echo "000000" | sudo -S ip link set can1 up
# config buffer size
echo "000000" | sudo -S sysctl -w net.core.rmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.rmem_default=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_default=524288
# check CAN FD status
echo "CAN0 status:"
ip -details link show can0
echo "CAN1 status:"
ip -details link show can1
#Enable 5s to test
sudo pkill -f gpioset
gpioset --mode=time --sec=200000 gpiochip1 7=0 &
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip1 4=0 &
GPIO2_PID=$!
candump can0 &
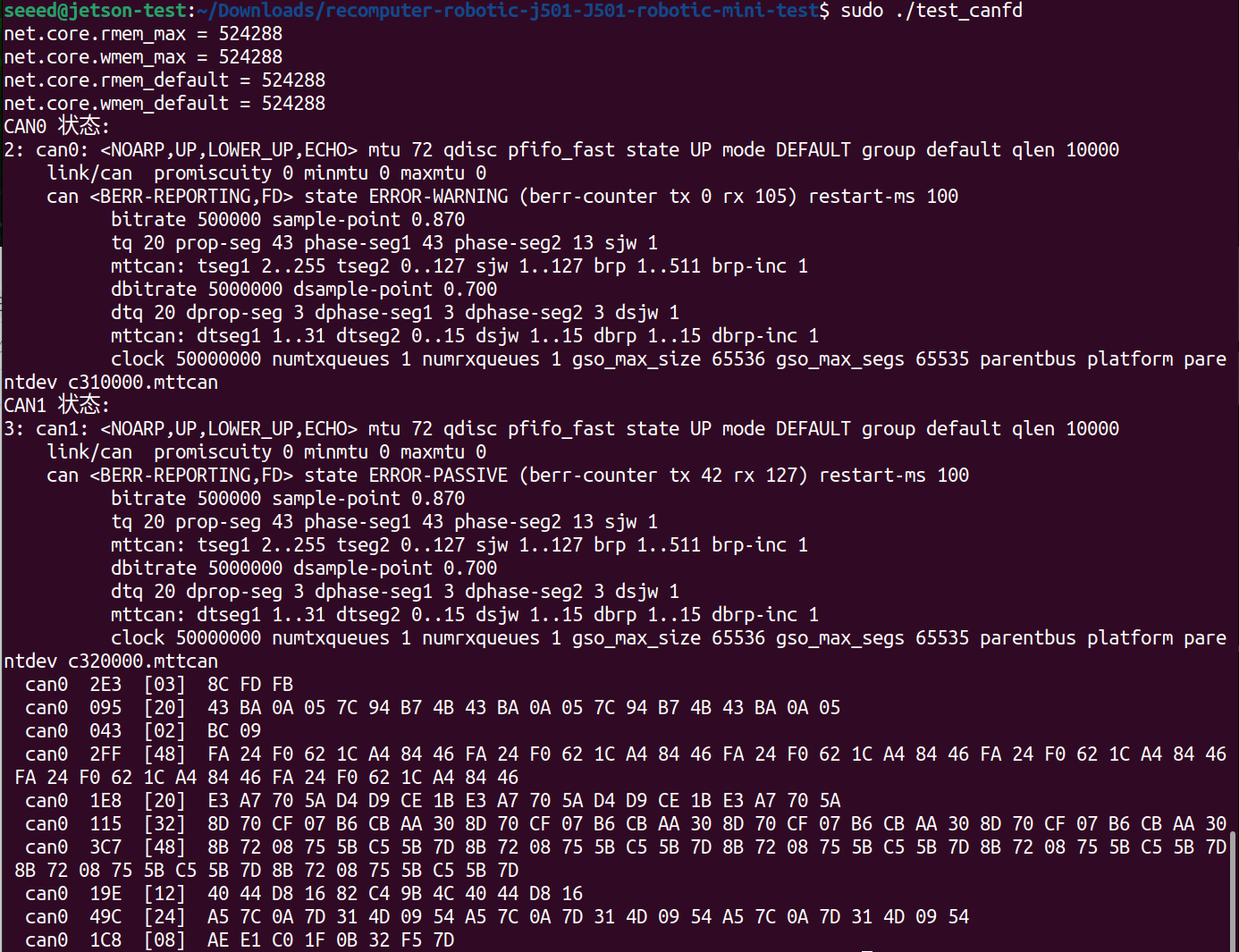
cangen can1 -f
Data transmission and reception between CAN0 and CAN1 will be completed:
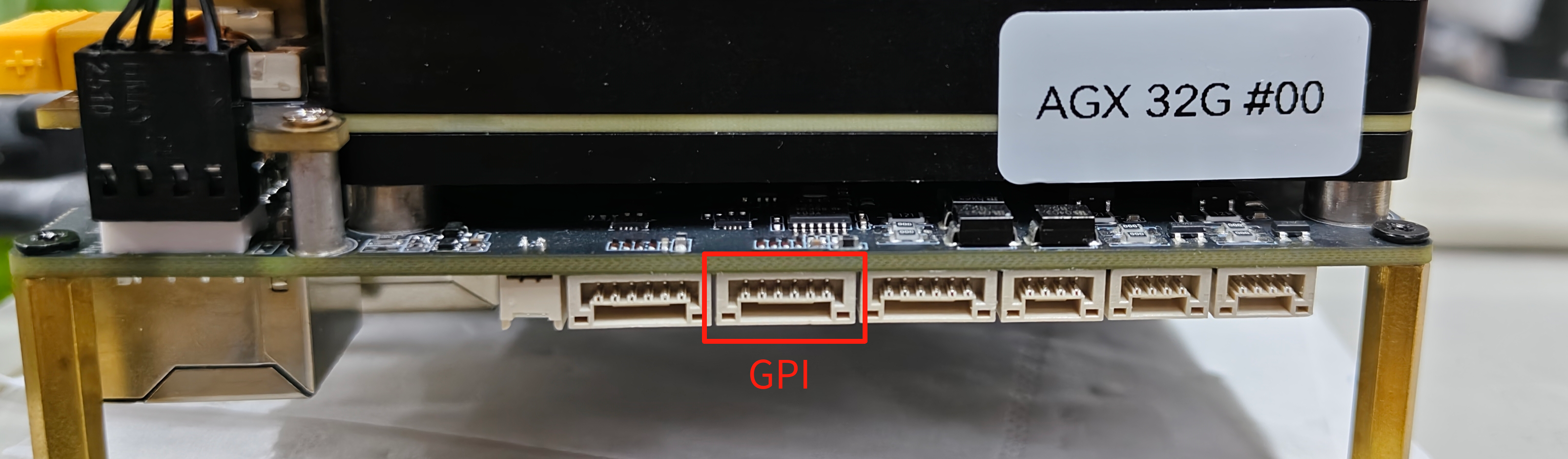
GPI && GPO
GPI
The Robotics J501 Mini provides a standard 6-pin JST header for GPI.
The GPI datasheet schematic is shown below:
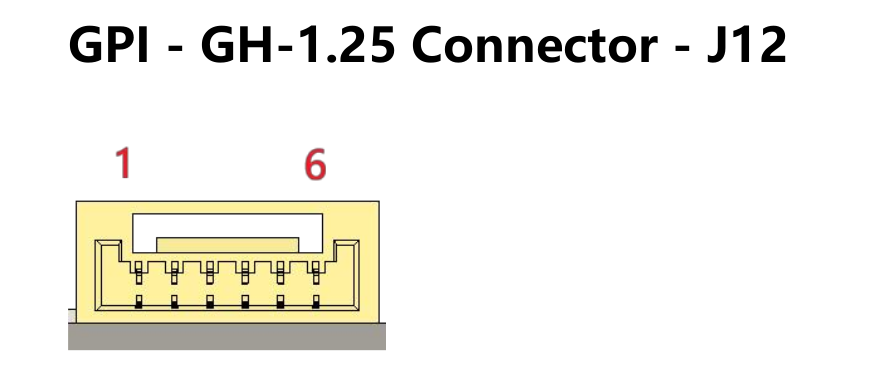
The pin definitions for J12 are as follows:
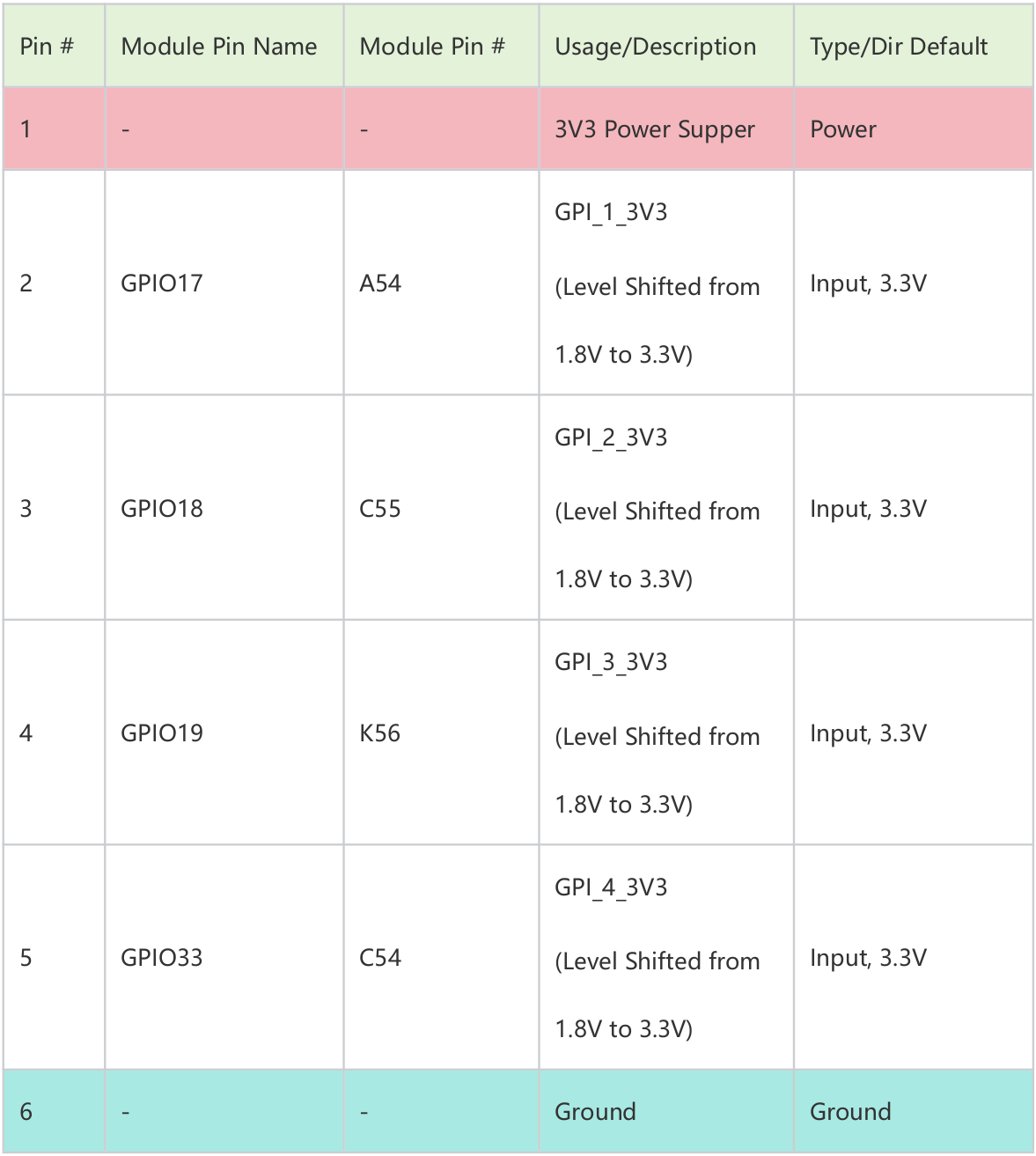
Enable GPI 1 to GPI 4 for reading input status:
sudo gpioset --mode=wait 0 131=0
To read the input of GPI 1 to GPI 4, refer to the following commands:
sudo gpioget 0 96 #read the input of GPI 1
sudo gpioget 0 104 #read the input of GPI 2
sudo gpioget 0 86 #read the input of GPI 3
sudo gpioget 0 83 #read the input of GPI 4
When a high level is read, it will return 1; when a low level is read, it will return 0.
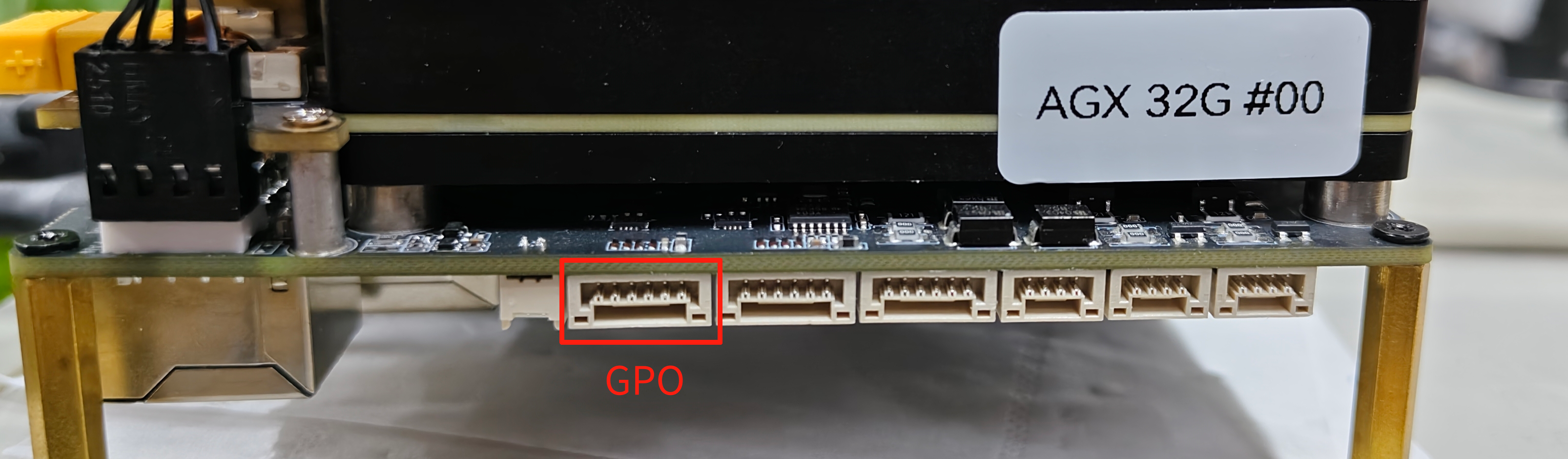
GPO
The Robotics J501 Mini provides a standard 6-pin JST header for GPO.
The GPO datasheet schematic is shown below:
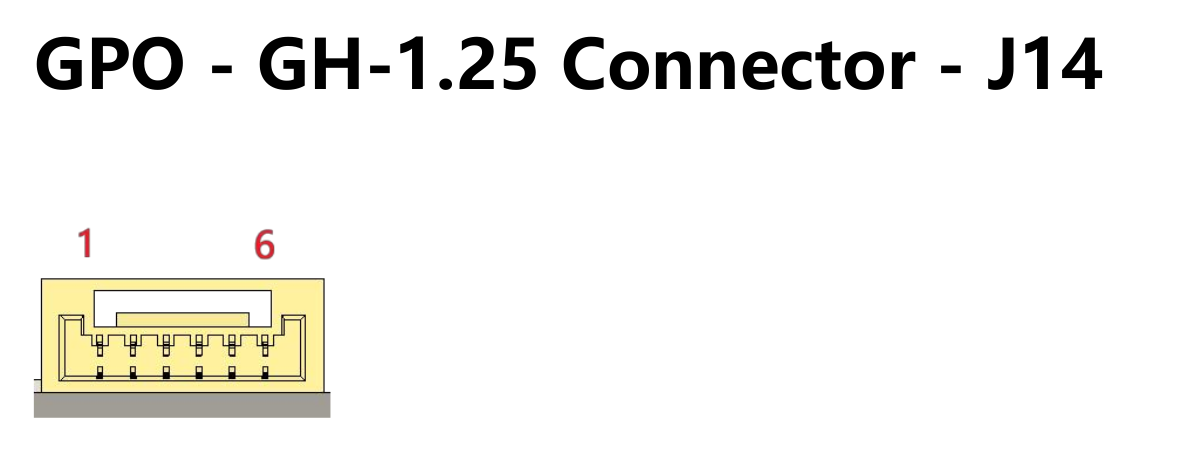
The pin definitions for J14 are as follows:
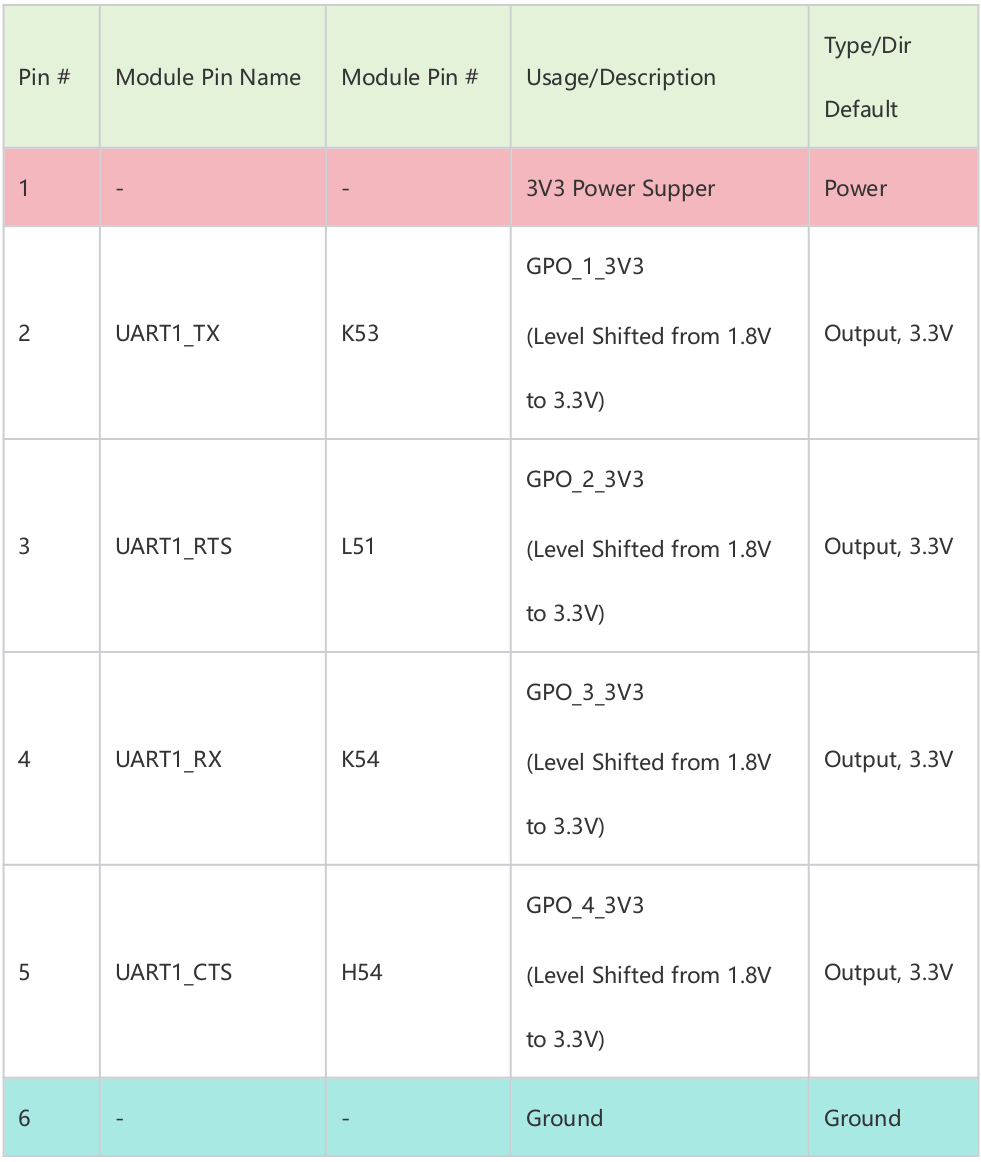
Enable GPO 1 to GPO 4 for output status:
sudo gpioset --mode=wait 0 79=1
To set the output of GPO 1 to GPO 4, refer to the following commands:
sudo gpioset --mode=wait 0 110=1 #set output of GPO 1 to high voltag
sudo gpioset --mode=wait 0 112=1 #set output of GPO 2 to high voltag
sudo gpioset --mode=wait 0 111=1 #set output of GPO 3 to high voltag
sudo gpioset --mode=wait 0 113=1 #set output of GPO 4 to high voltag
sudo gpioset --mode=wait 0 110=1 #set output of GPO 1 to low voltag
sudo gpioset --mode=wait 0 112=1 #set output of GPO 2 to low voltag
sudo gpioset --mode=wait 0 111=1 #set output of GPO 3 to low voltag
sudo gpioset --mode=wait 0 113=1 #set output of GPO 4 to low voltag
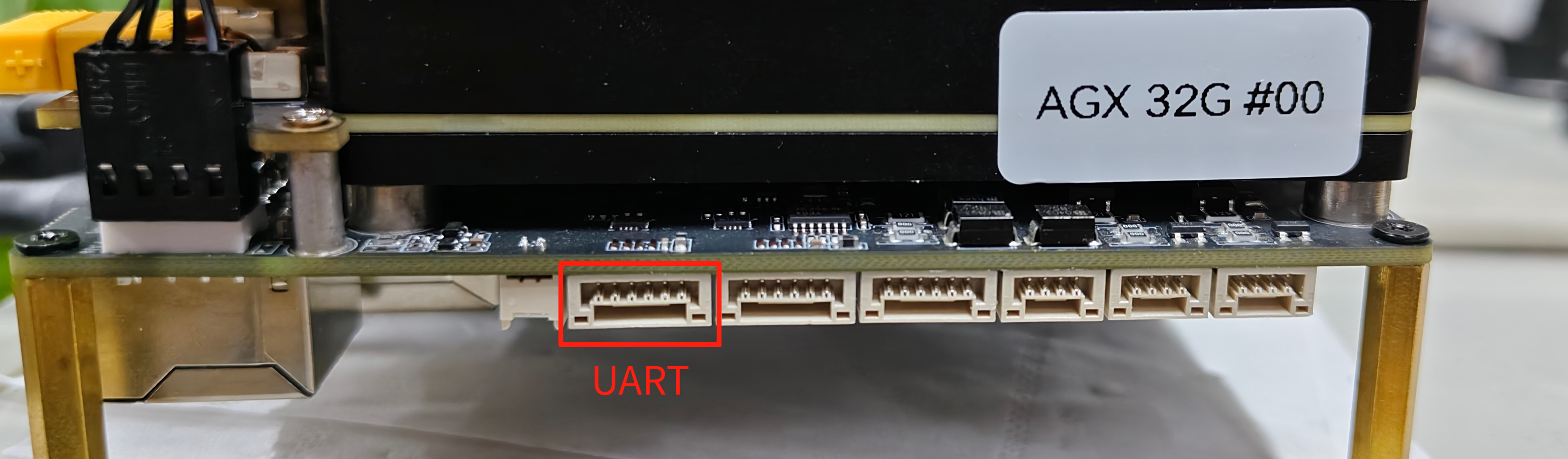
UART
The Robotics J501 Mini provides a standard 6-pin JST header for UART serial communication. UART and GPO use the same JST interface. This interface defaults to GPO functionality. If you need to switch to UART functionality, you must point to a new device tree and restart the device for the change to take effect.
For UART communication, please follow the following wiring. Here, we use the USB to TTL tool as an example.
The UART datasheet schematic is shown below:
The pin definitions for J14 are as follows:
UART and GPO share the same physical interface. By default, this interface functions as GPO. If you need to switch to UART, please refer to the content of this section.
For different modules, you need to download the corresponding device tree file.
.dtb download link for AGX Orin 32G:
https://files.seeedstudio.com/wiki/recomputer-j501-mini/tegra234-j501x-0000%2Bp3701-0004-recomputer-mini.dtb
.dtb download link for AGX Orin 64G:
https://files.seeedstudio.com/wiki/recomputer-j501-mini/tegra234-j501x-0000%2Bp3701-0005-recomputer-mini.dtb
Copy the device tree to the specified path:
# AGX Orin 32G
sudo cp tegra234-j501x-0000%2Bp3701-0004-recomputer-mini.dtb /boot/
# AGX Orin 64G
sudo cp tegra234-j501x-0000%2Bp3701-0005-recomputer-mini.dtb /boot/
Back up and modify /boot/extlinux/extlinux.conf, adding a line to point to the new .dtb file:
sudo cp /boot/extlinux/extlinux.conf /boot/extlinux/extlinux.conf.bak
sudo vim /boot/extlinux/extlinux.conf
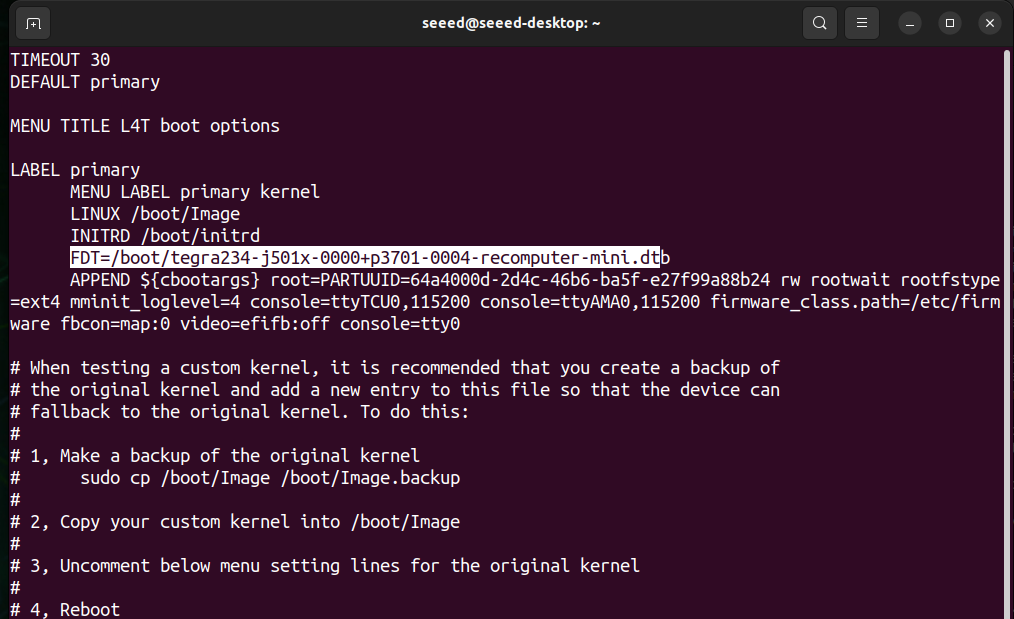
Based on the device tree file name you are using, add a line FDT=/your_path in extlinux.conf. Taking AGX Orin 32G as an example:
LABEL primary
MENU LABEL primary kernel
LINUX /boot/Image
INITRD /boot/initrd
FDT=/boot/tegra234-j501x-0000+p3701-0004-recomputer-mini.dtb
The 6-pin JST header UART is mapped to /dev/ttyTHS1 on the Jetson. You can use minicom to view serial port data transmission and reception:
sudo apt install minicom
sudo minicom -D /dev/ttyTHS1
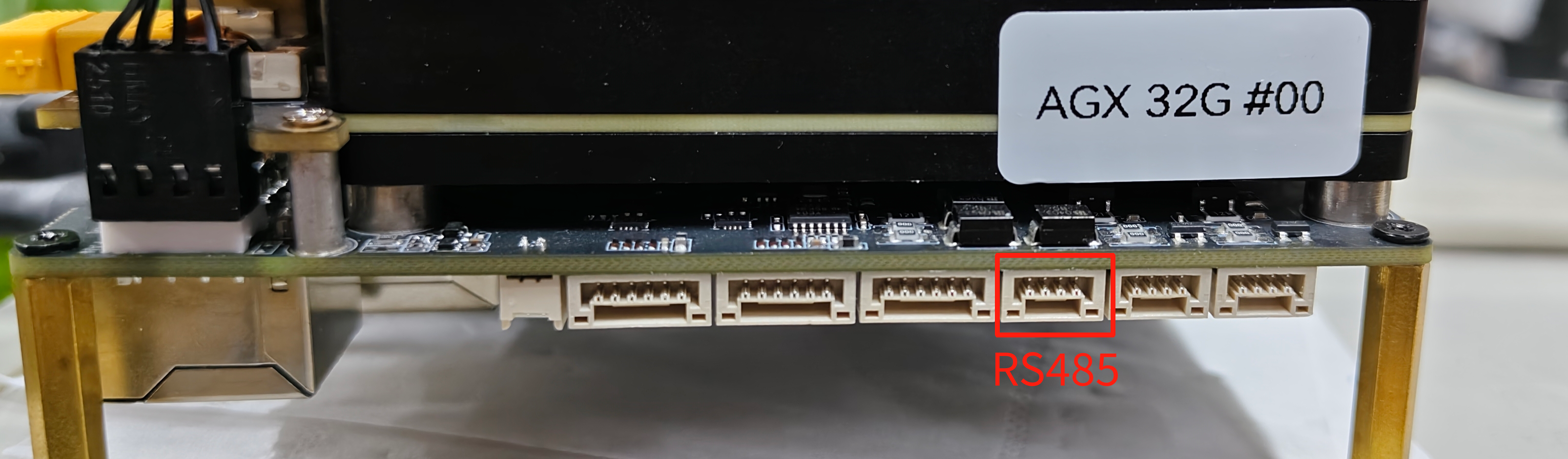
RS485
The RS485 interface provides a robust and noise-resistant differential communication channel commonly used in industrial environments. It supports long-distance, multi-drop serial communication and is ideal for connecting sensors, motor controllers, PLCs, and other industrial devices.
Hardware Connection
Robotics J501-Mini provides a JST 4-pin(GH 1.25) headers for RS485.
The RS485 datasheet schematic is shown below:
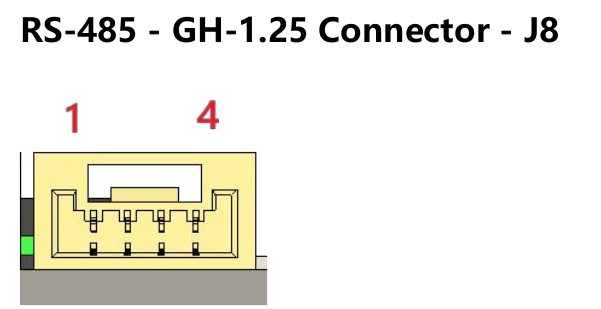
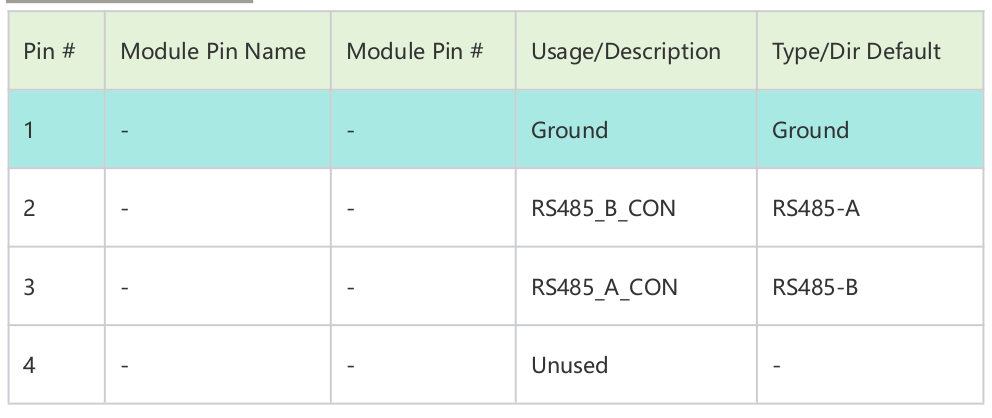
The pin definitions for J8 are as follows:
Usage Instruction
Refer to the following commands to enable the RS485 interface:
sudo gpioset --mode=wait 1 9=0 # Enable 120R resistance
sudo gpioset --mode=wait 0 126=0 # Enable RS485
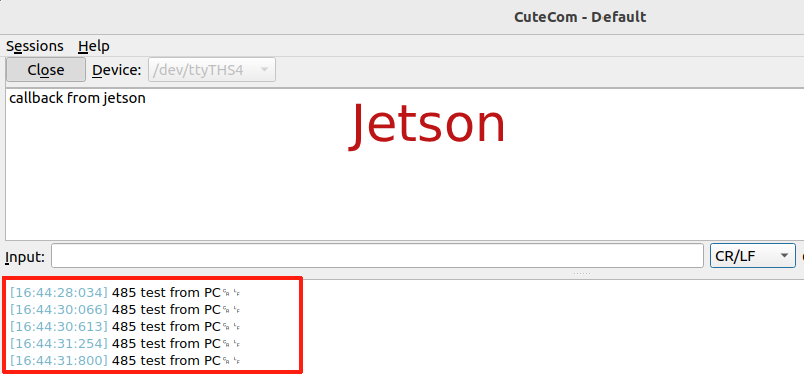
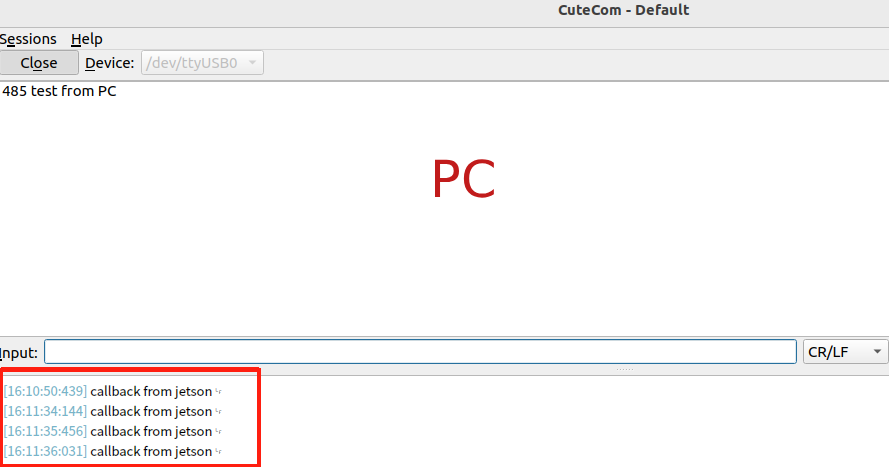
The RS485 interface is mapped to /dev/ttyTHS4 on the Jetson. You can use cutecom to test serial data transmission and reception with a PC:
sudo apt install cutecom
sudo cutecom
Select /dev/ttyTHS4, set both Jetson and PC to a baud rate of 9600, and connect the Jetson and PC via an RS485 to USB module.
The serial data transmission and reception effect is shown in the figure below:
I2S
The I2S interface provides a digital audio communication bus designed for transmitting stereo audio data between devices. The Robotics J501-Mini supports standard I2S signaling, allowing high-quality, low-latency audio input and output for applications such as voice interaction, sound localization, and real-time audio processing.
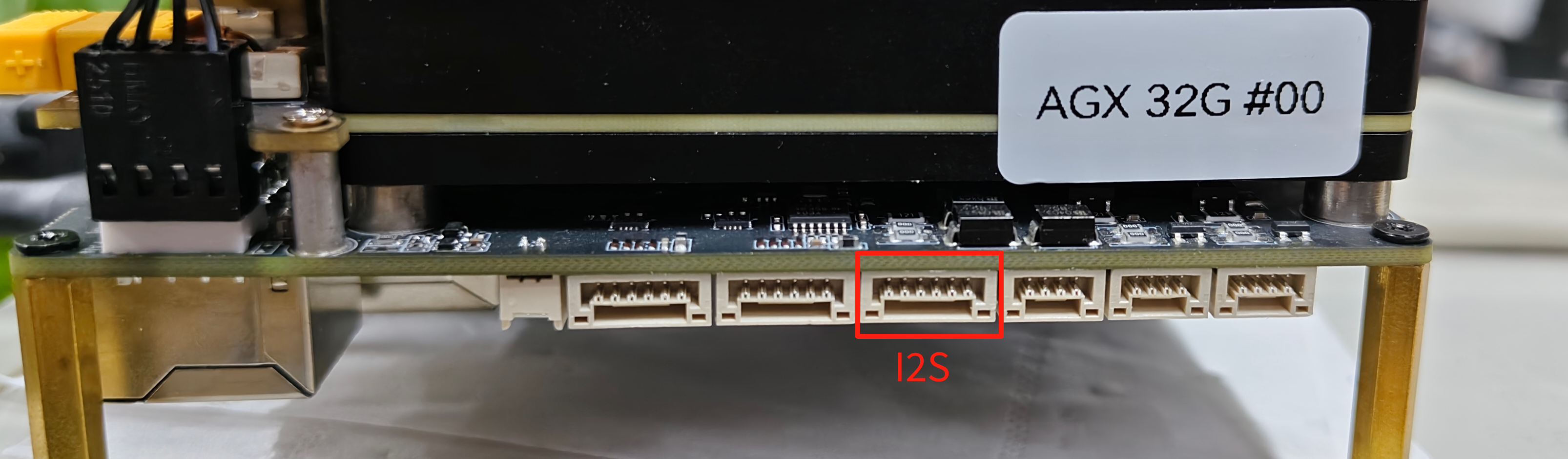
Hardware Connection
Robotics J501-Mini provides a 1x JST 5-Pin Connector(GH 1.25) for I2S.
The I2S datasheet schematic is shown below:
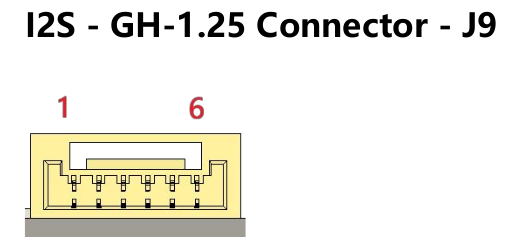
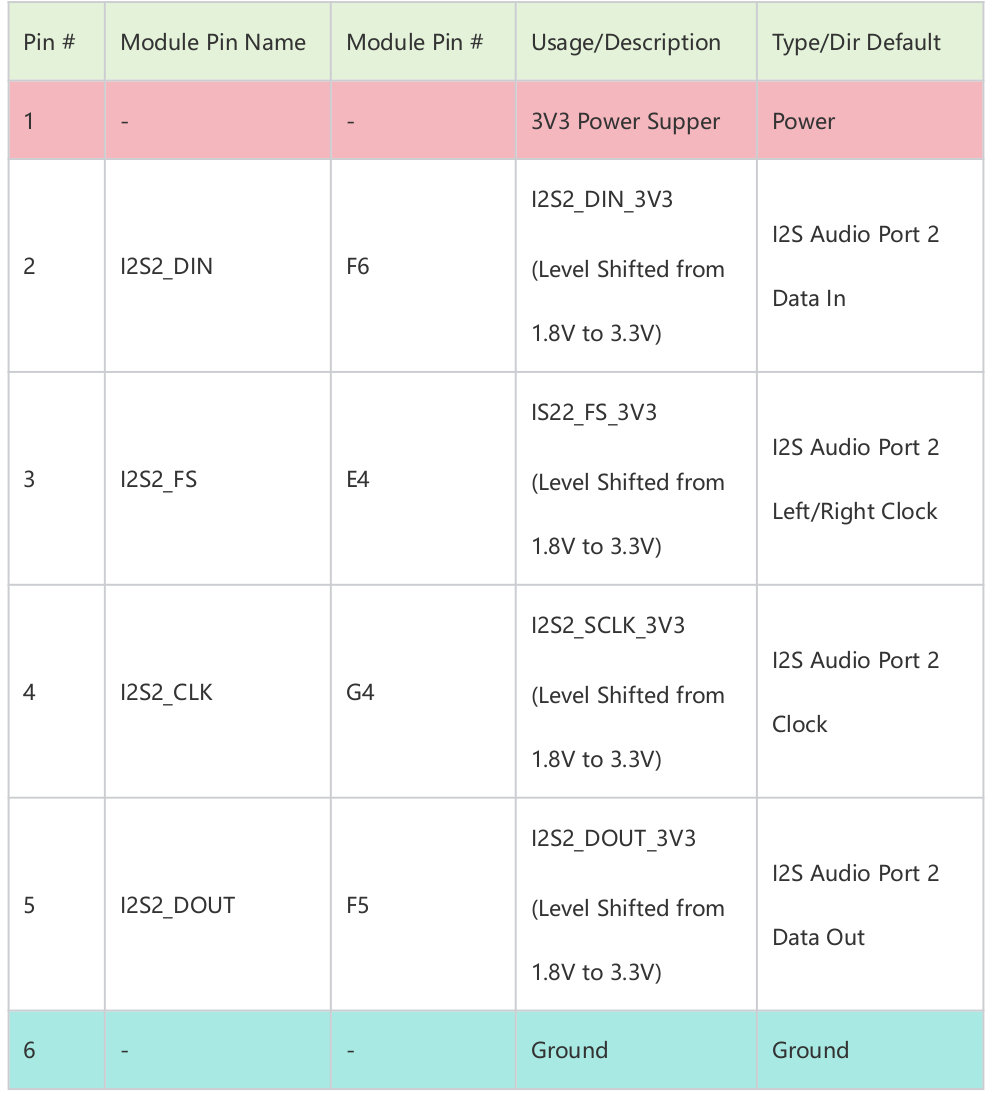
The pin definitions for J9 are as follows:
Usage Instruction
To enable I2S, you need to configure it in jetson-io.py. Run the following in the terminal:
sudo python /opt/nvidia/jetson-io/jetson-io.py
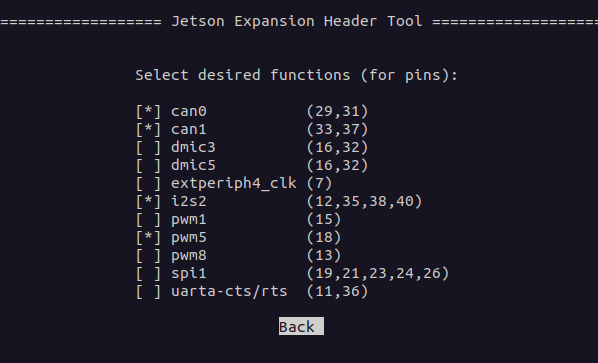
Then, refer to the four steps below to enable the I2S interface:
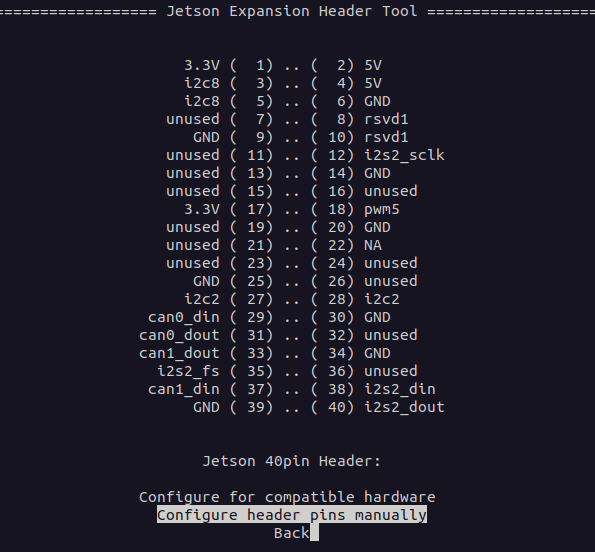
- step1: Select the Jetson 40-pin header option
- step2: Select Configure header pins manually
- step3: Select
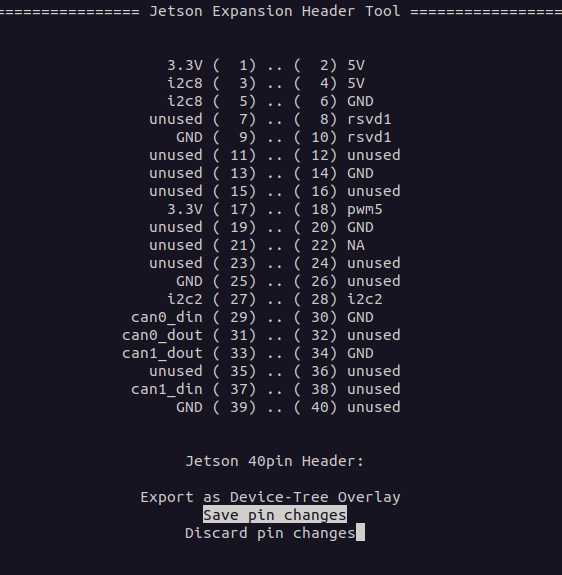
i2s2; after selection, it will be marked with[*] - step4: Save the settings and reboot the Jetson

After enabling I2S, this section demonstrates how to use I2S to drive a dual-channel speaker. First, enter the following in the terminal:
amixer -c APE cset name="I2S2 Mux" "ADMAIF1" # Speaker
If you are using a microphone:
amixer -c APE cset name="ADMAIF2 Mux" "I2S2" # Microphone
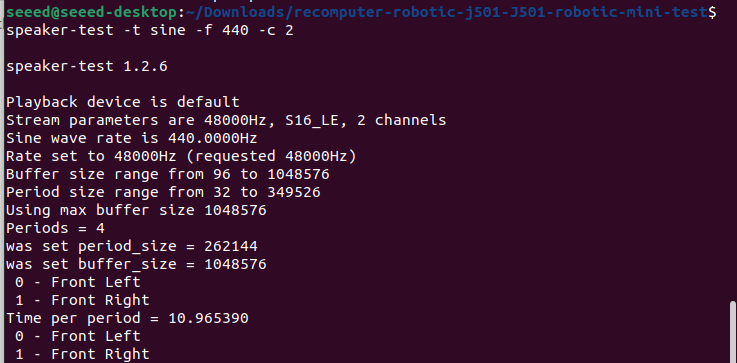
Refer to the command below to drive the speaker, where -c should be changed to the number of speaker channels you are using:
speaker-test -t sine -f 440 -c 2
You can see the output in the terminal when the speaker is driven normally, as shown in the figure below.
RTC
The Robotics J501-Mini provides a standard 2-pin header for RTC (3V).
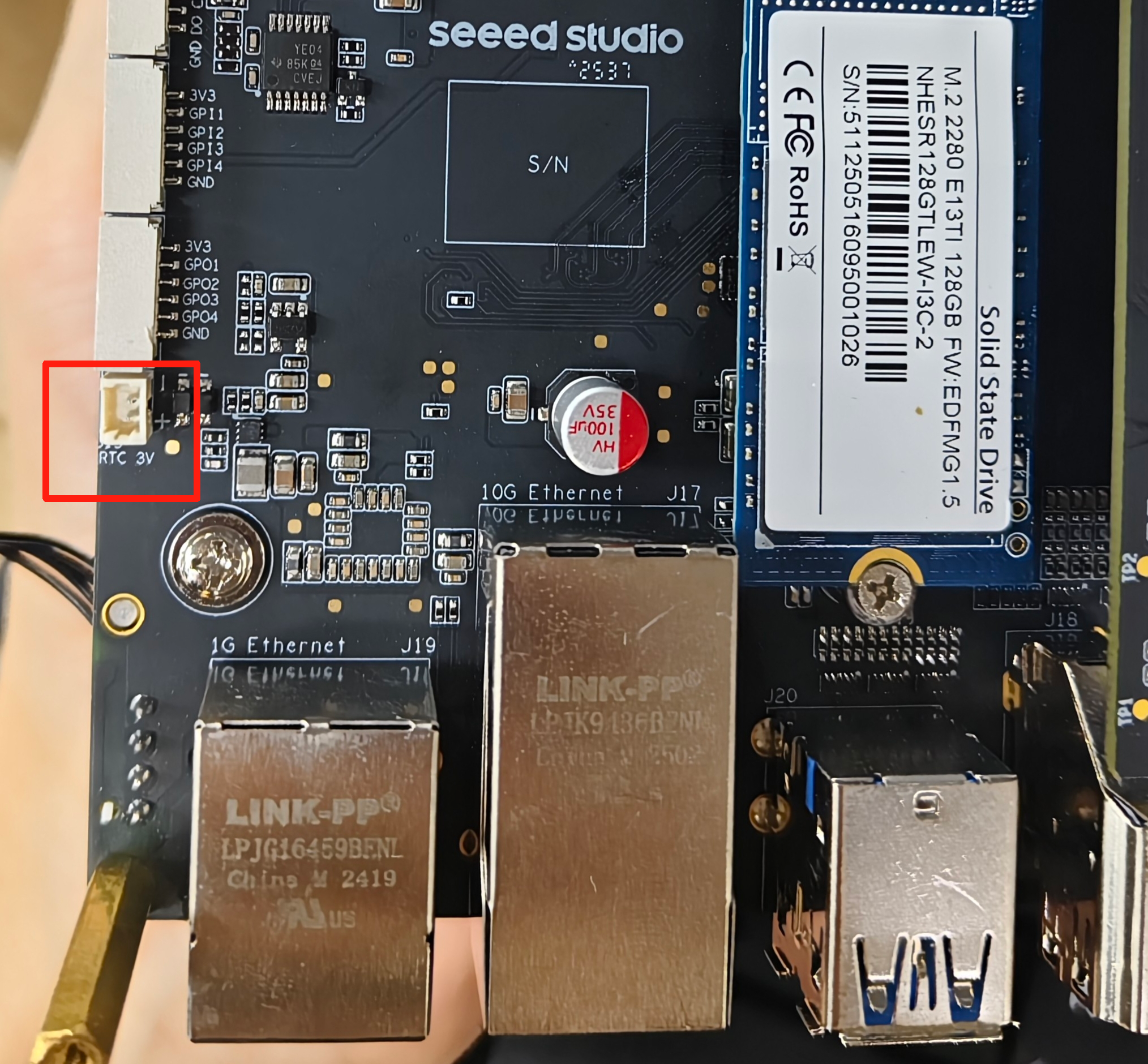
The RTC datasheet schematic is shown below:
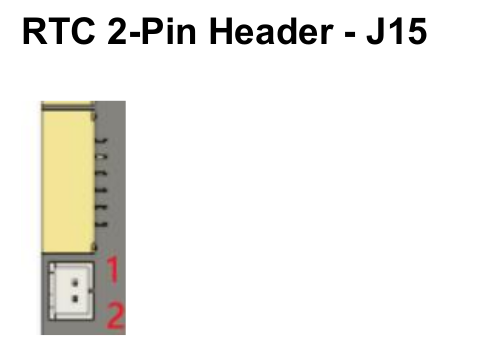
The pin definitions for J15 are as follows:
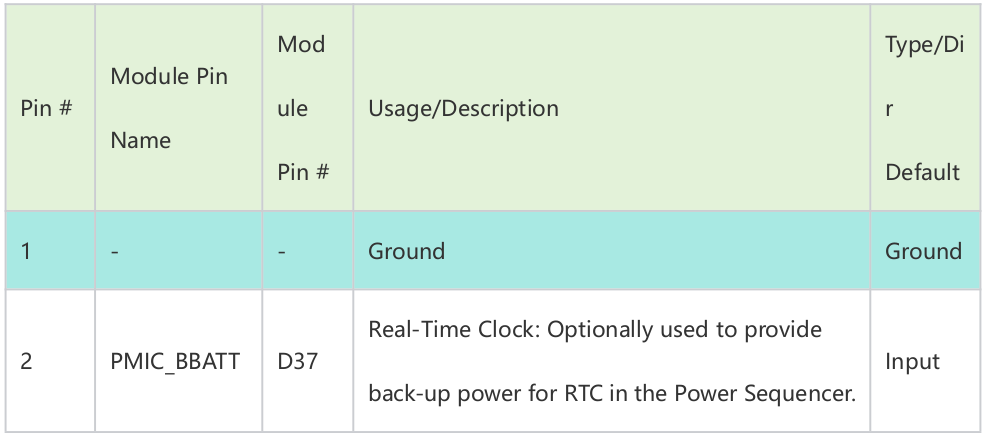
After plugging in the external battery, you can check the operating status of rtc0 (main RTC, corresponding to the onboard battery) in the terminal:
cat /sys/class/rtc/rtc0/power/runtime_status
Extension Port - GMSL
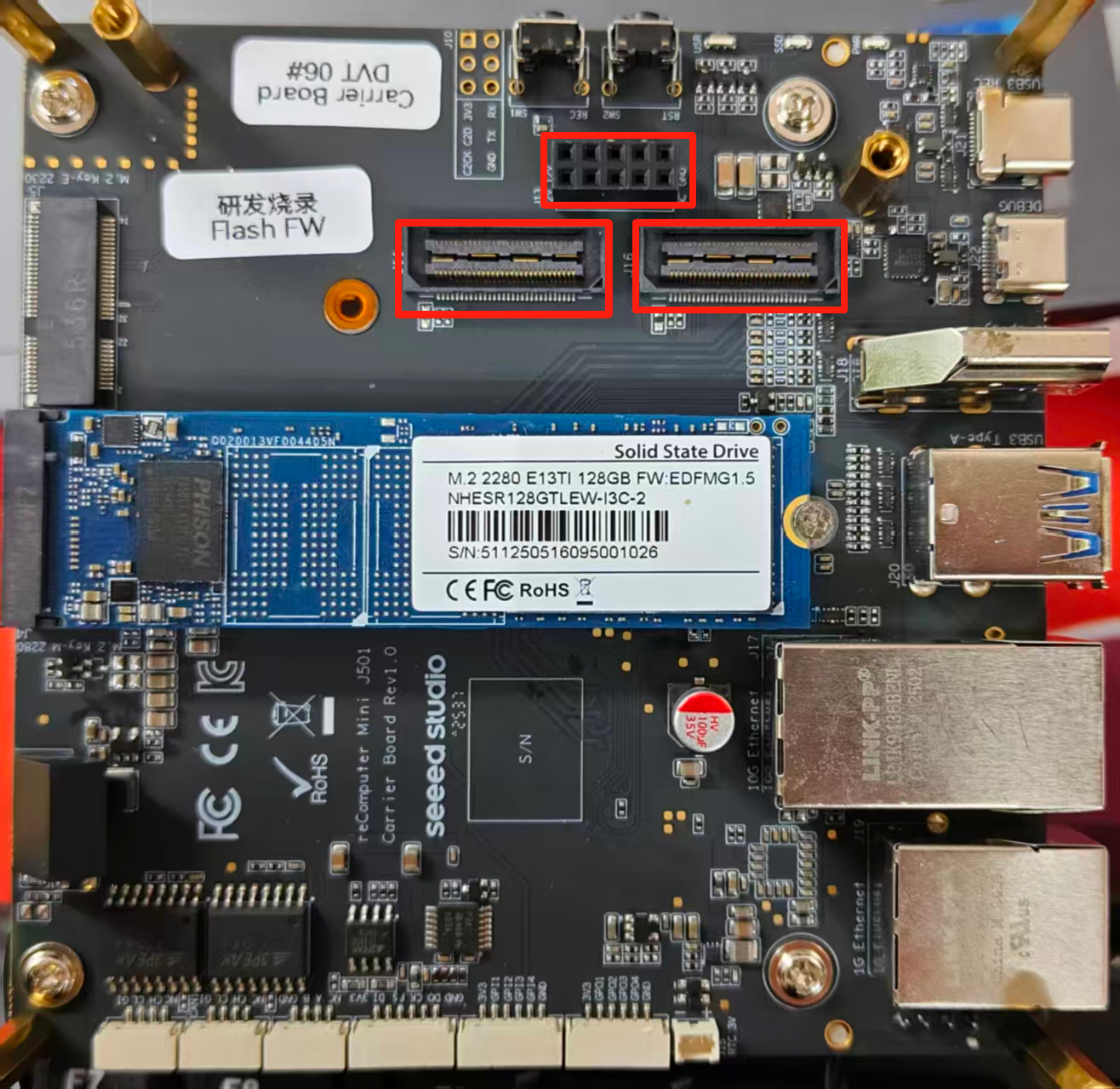
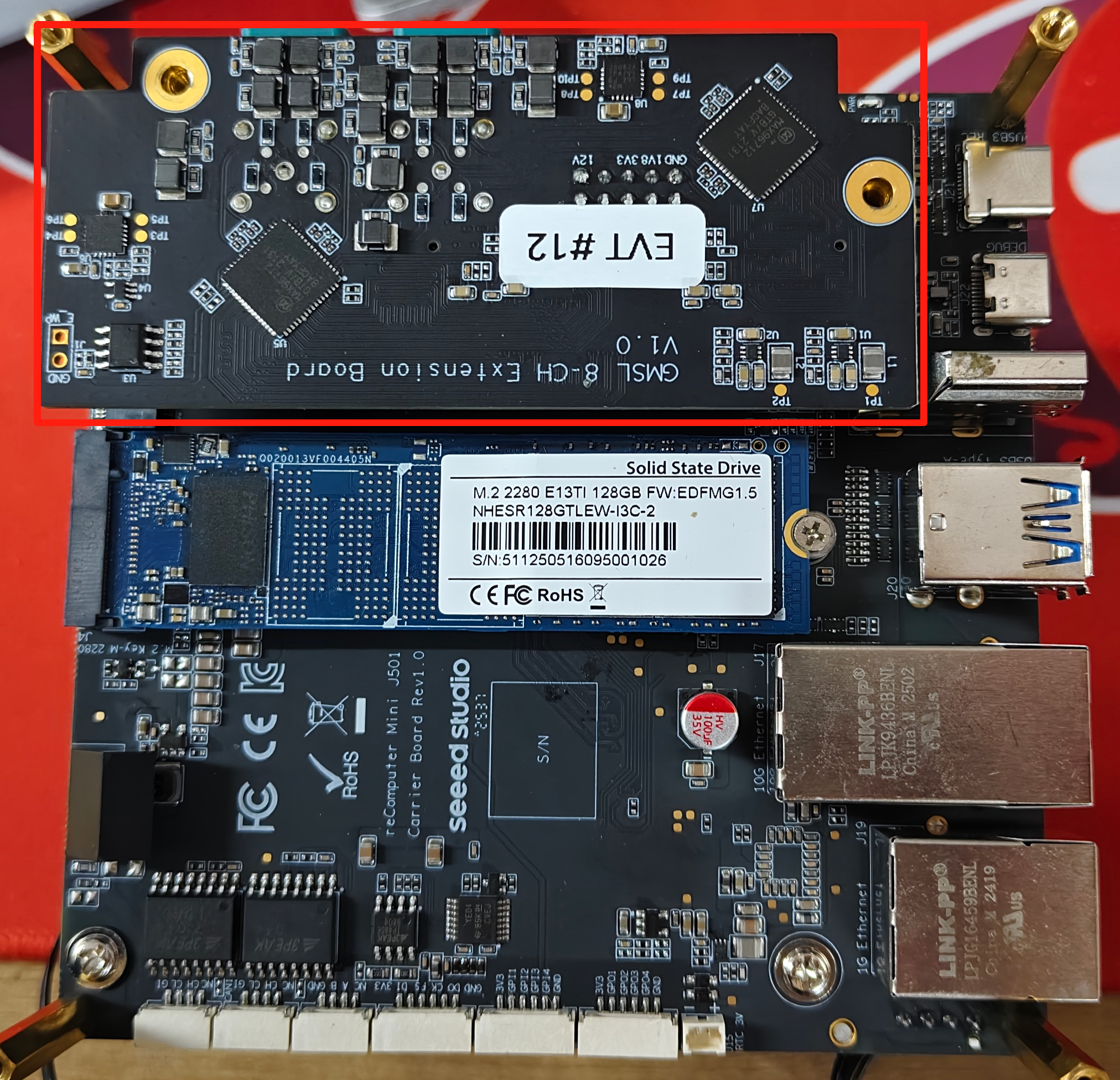
The Robotics j501-Mini carrier board features a Camera Expansion Header for GMSL extension board. It can simultaneously connect and operate four GMSL cameras at the same time.
Hardware Connection
Here are the Robotics j501-Mini carrier board GMSL camera expansion board connection slot(need to prepare an extension board in advance):
The following are the GMSL camera models that we have already supported:
- SG3S-ISX031C-GMSL2F
- SG2-AR0233C-5200-G2A
- SG2-IMX390C-5200-G2A
- SG8S-AR0820C-5300-G2A
Usage Instruction
Before enabling the GMSL functionality, please ensure that you have installed a JetPack version with the GMSL expansion board driver.
Configure the Jetson IO file
sudo /opt/nvidia/jetson-io/jetson-io.py
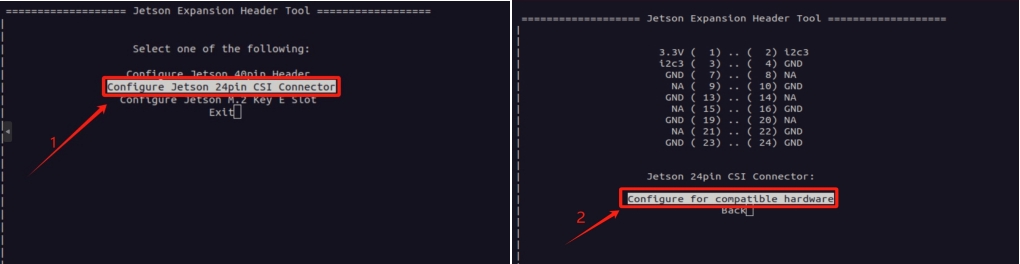
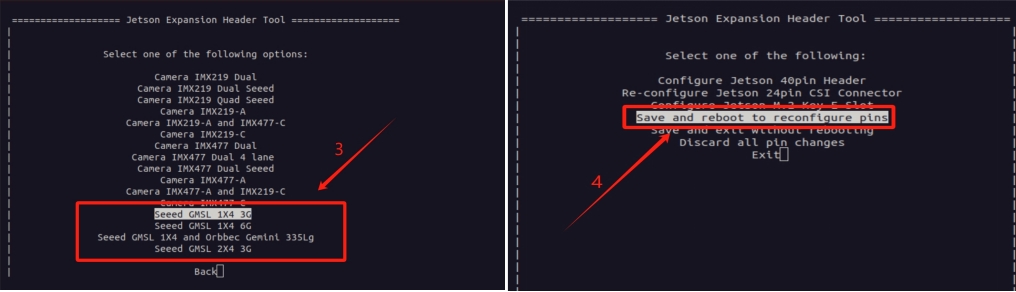
There are three overlay files in total, namely Seeed GMSL 1X4 3G, Seeed GMSL 1X4 6G, Seeed GMSL 1X4, and Orbbec Gemini 335Lg. These correspond to the 3G camera of SG3S, the 6G camera of SG2 and SG8S, and the camera of Orbbec respectively. As shown in Figure 3, please configure the io file according to the model of your camera.
step 2. Install the video interface configuration tools.
sudo apt update
sudo apt install v4l-utils
Use the cameras of SGxxx Series
step 1. Set the channel format for the serializer and deserializer.The interface number in the figure corresponds to the serializer/deserializer number.
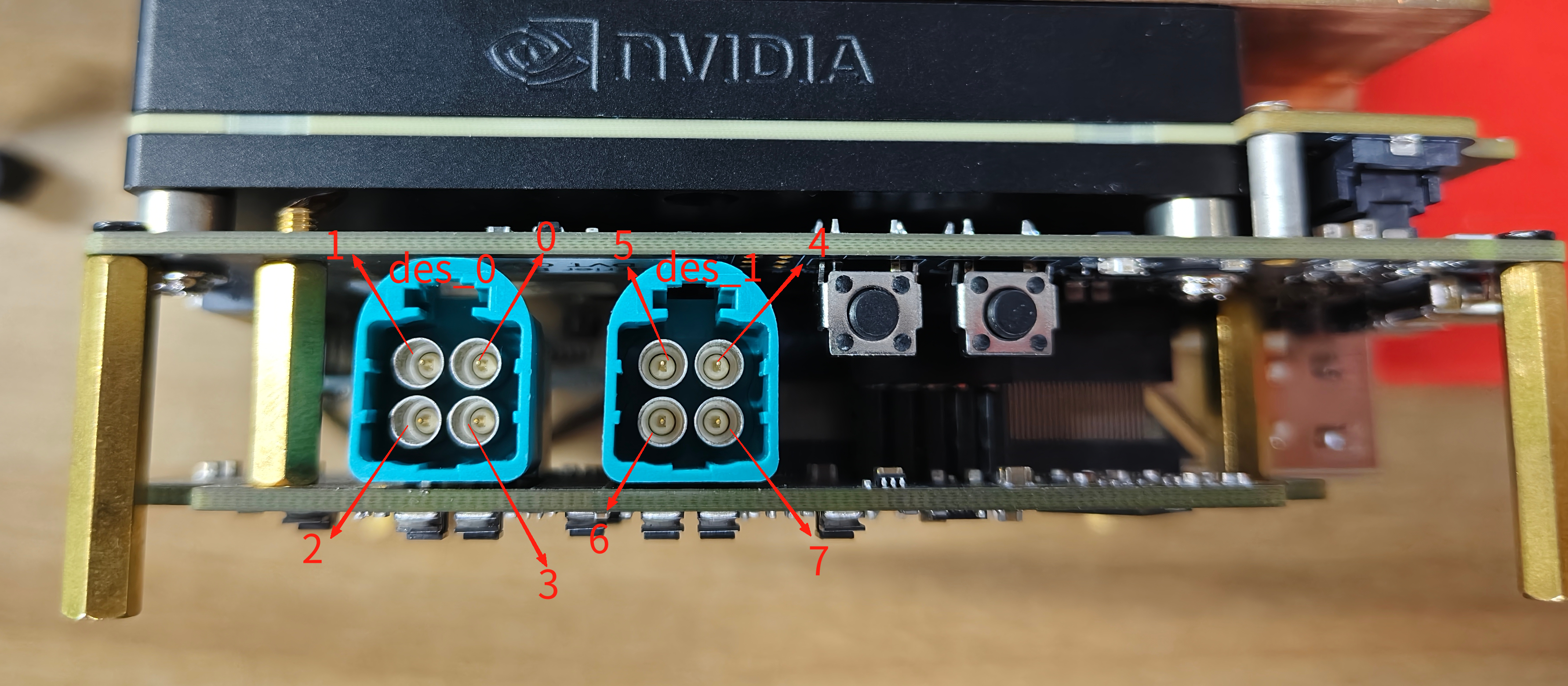
media-ctl -d /dev/media0 --set-v4l2 '"ser_0_ch_0":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_0":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_1_ch_1":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_1":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_2_ch_2":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_2":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_3_ch_3":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_3":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_4_ch_0":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_0":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_5_ch_1":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_1":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_6_ch_2":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_2":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_7_ch_3":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_3":0[fmt:YUYV8_1X16/1920x1536]'
ser_0_ch_0 is the first channel of the decoder, des_ch_0 is the serializer on the first camera, and the same applies to the others.If the connected camera has a different resolution, then the configuration here will be based on the actual format of the camera.
We need to set the channel format for the serializer and deserializer every time the device restarts.
step 2. Set the resolution of the camera.
Here we demonstrate how to configure cameras of different models and resolutions.
v4l2-ctl -V --set-fmt-video=width=1920,height=1080 -c sensor_mode=1 -d /dev/video0
v4l2-ctl -V --set-fmt-video=width=1920,height=1080 -c sensor_mode=1 -d /dev/video1
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video2
v4l2-ctl -V --set-fmt-video=width=3840,height=2160 -c sensor_mode=2 -d /dev/video3
--set-fmt-video follows the resolution which is selected based on the camera being connected. The sensor_mode is also chosen accordingly. Currently, there are three sensor_mode options, each corresponding to a different resolution.
- sensor_mode=0 -------> YUYV8_1X16/1920x1536
- sensor_mode=1 -------> YUYV8_1X16/1920x1080
- sensor_mode=2 -------> YUYV8_1X16/3840x2160
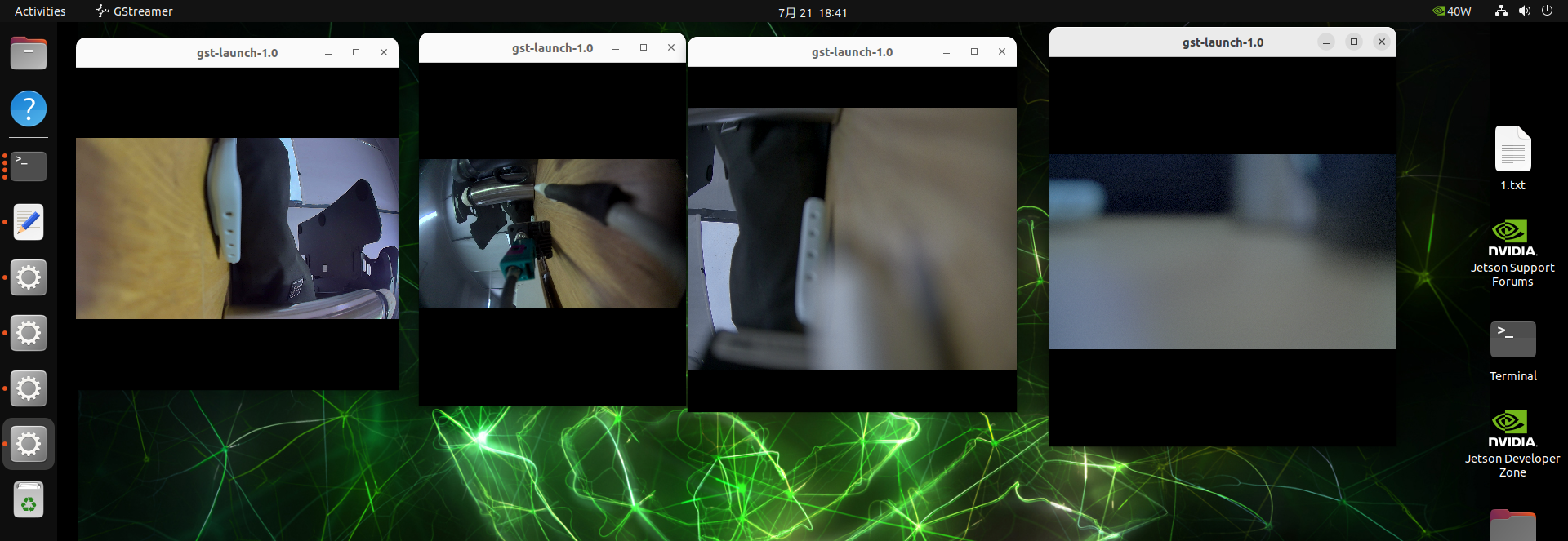
step 3. Start the camera.
gst-launch-1.0 v4l2src device=/dev/video0 ! \
'video/x-raw,width=1920,height=1080,framerate=30/1,format=UYVY' ! \
videoconvert ! xvimagesink -ev
gst-launch-1.0 v4l2src device=/dev/video1 ! \
'video/x-raw,width=1920,height=1080,framerate=30/1,format=UYVY' ! \
videoconvert ! xvimagesink -ev
gst-launch-1.0 v4l2src device=/dev/video2 ! \
'video/x-raw,width=1920,height=1536,framerate=30/1,format=UYVY' ! \
videoconvert ! xvimagesink -ev
gst-launch-1.0 v4l2src device=/dev/video3 ! \
'video/x-raw,width=3840,height=2160,framerate=30/1,format=UYVY' ! \
videoconvert ! xvimagesink -ev
Display
The Robotics J501 Mini is equipped with an HDMI for high-resolution display output.
Resources
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.