SENSING GMSL2 Cameras

We provide different GMSL2 cameras that cover various resolution, transfer speed and etc. These cameras can be used for applications on many fields. For examples:
- Automotive
- ADAS + Viewing Fusion
- High Dynamic Range Imaging
- Autonomous Driving
- Robotics
Check the below specifications for more detail.
Specifications
The camera is equipped with SONY CMOS image sensor ISX031 and Maxim GMSL2 serializer MAX96717F. It has an automotive-grade sensor with a well-tuned Image Signal Processor (ISP) that produces exceptional image quality, which comes with an IP67-rated enclosure – is supplied with an AA lens that is focused and glued in our factory.
| Name | Parameter |
|---|---|
| Sensor | SONY 2.95MP ISX031 RGGB |
| ISP | Built-in |
| Image Size | 1/2.42 inch CMOS |
| Output Pixels | 1920 H * 1536 V |
| Pixel Size | 3.0 um * 3.0 um |
| Frame Rate | 1920 * 1536 @ 30fps |
| HDR Support | Yes |
| LFM | Yes |
| Output data | YUV422@8bit |
| Serializer | MAXIM MAX9295A |
| Camera Interface | GMSL2 |
| Power Supply | 9~16V POC |
| Current | <200mA@12VDC |
| Connector | Amphenol Fakra (Z Code) |
| Operating temp. range | -40 ~ 85℃ |
| Dimensions | W:25mm, L:25mm, H:18.6mm |
| Weight | <50g |
Hardware Settings
| Category | spec | Parameter |
|---|---|---|
| Serializer | Model | MAX9295A |
| I2C Address | 0x80 (8 bit address) | |
| Rate | GMSL2 (6G bps) | |
| ISP | Model | ISX031 |
| I2C Address | 0x34 (8 bit address) | |
| Frame Sync | Controlled by MAX9295A MFP7 | |
| Reset | Controlled by MAX9295A MFP0 |
Getting Started
We'll use reComputer Robotics J4012 for demonstration, what you might need
- SENSING GMSL2 camera
- A Mini-Fakra cable
- reComputer Robotics GMSL2 extension board
Setting up the Device
Connect the Mini Fakra cable with camera, there were 4 channels on reComputer Robotics J30/J40, we used the SG3S-ISX031C-GMSL2-F camera and it's connected to the '1' channel (silk screen letter 'B').
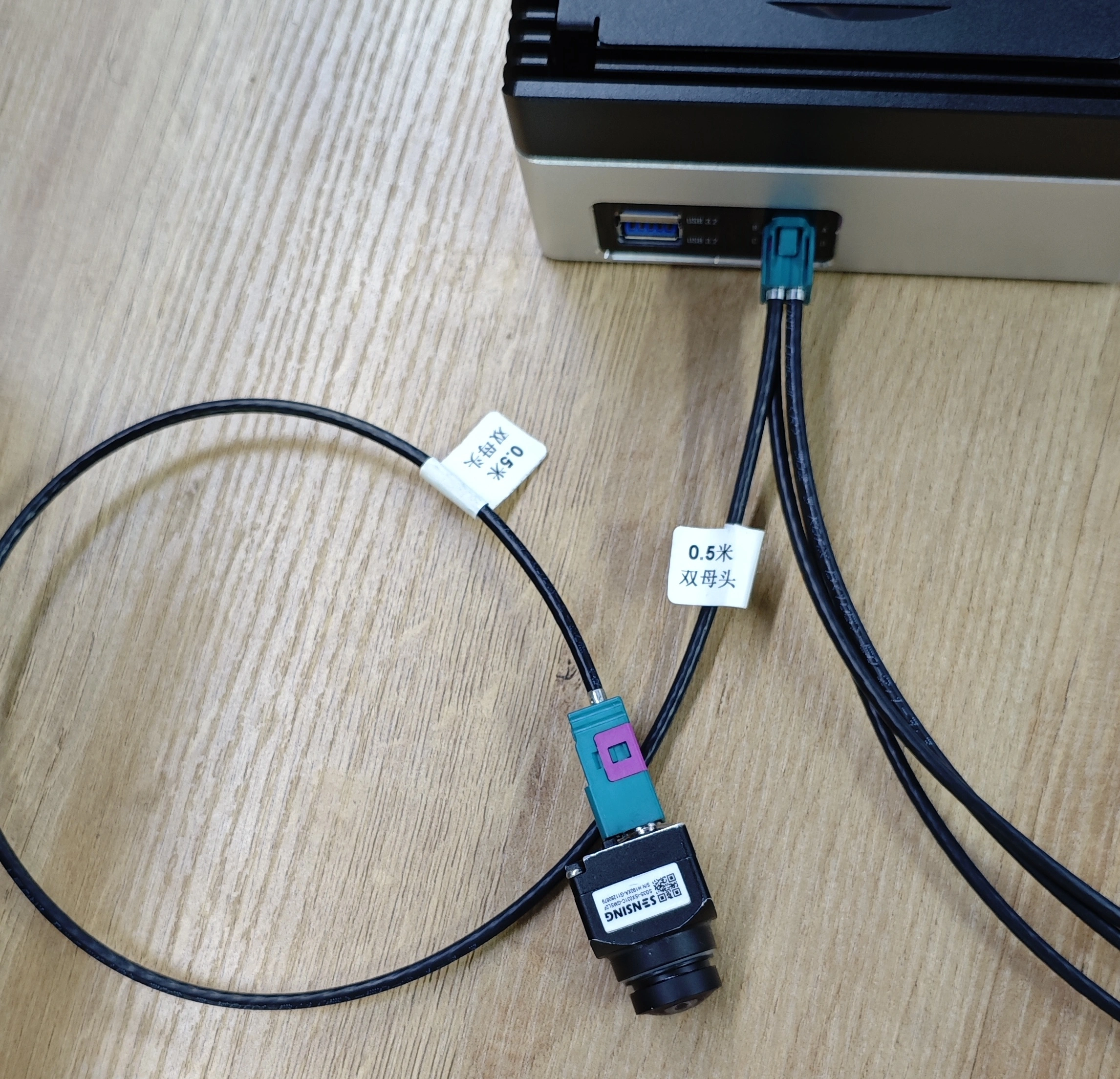
Before you begin, let's get familiar with the 4 channels since we'll use it during our configurations later.

These 4 channels are labelled as 'A', 'B', 'C' and 'D' on device, we recommend our customer to connect the camera with given alphabet order, in which case your video devices will be mapped as '/dev/video0', '/dev/video1', '/dev/video2', '/dev/video3' on your Jetson Linux correspondingly.
But if you have only one camera connected, only 'video0' will be displayed.
Next, we are going to configure the device tree overlay with Jetson IO to enable our device (you won't see video nodes under '/dev' folder until you configure it and reboot).
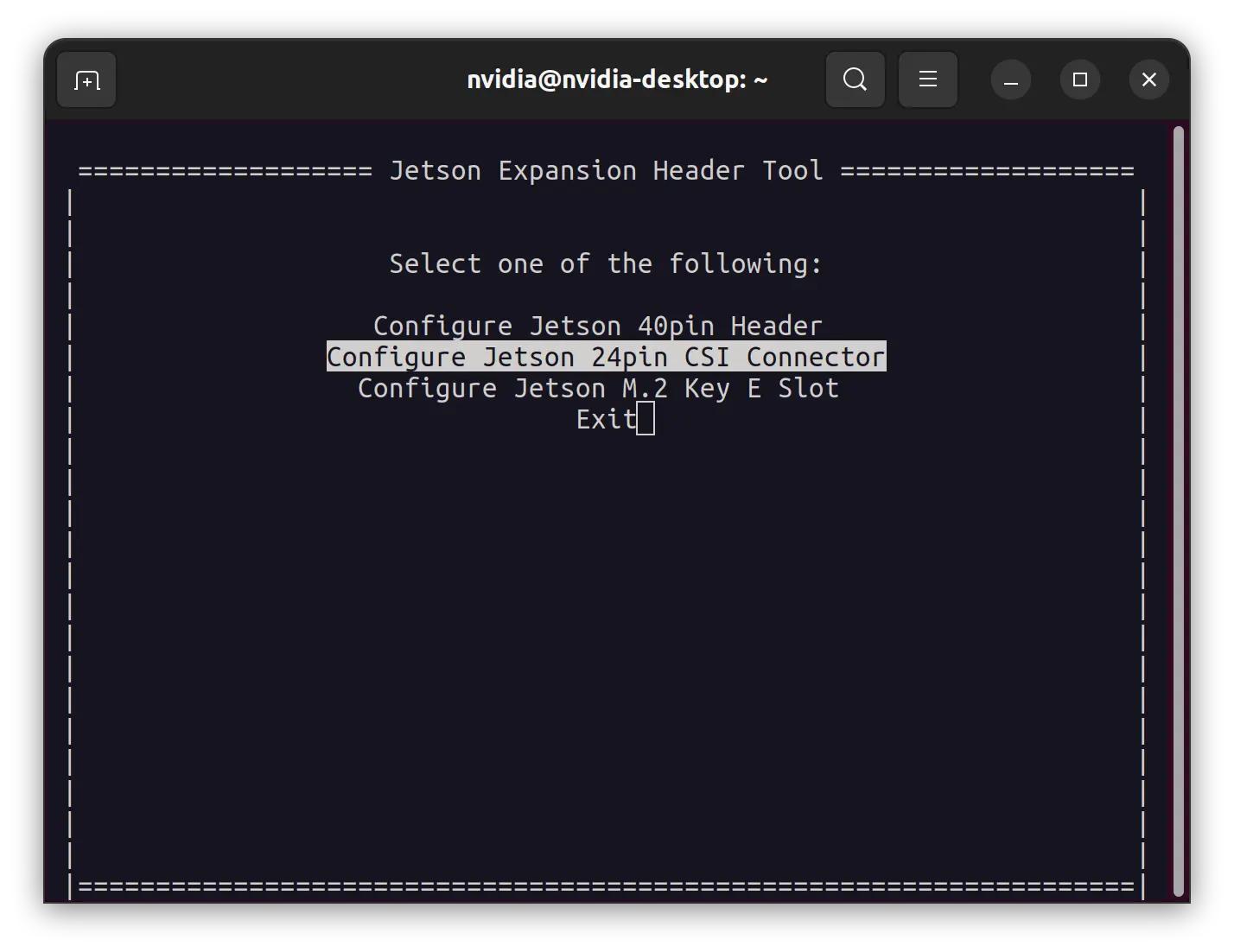
Configure Jetson IO
Launch JetsonIO with
sudo /opt/nvidia/jetson-io/jetson-io.py
Follow the configurations below step by step
During the above step, if you are using the 6Gbps camera, select 'Seeed GMSL 1X4 6G' overlay in step 3. The 6Gbps cameras are:
- SG3S-ISX031C-GMSL2-H
- SG8S-AR0820C-5300-G2A-H
- SG2-IMX390C-5200-G2A-H
- SG2-AR0233C-5200-G2A-H
Configure Video Information
In case you haven't install the v4l-utils
sudo apt-get update
sudo apt-get install v4l-utils -y
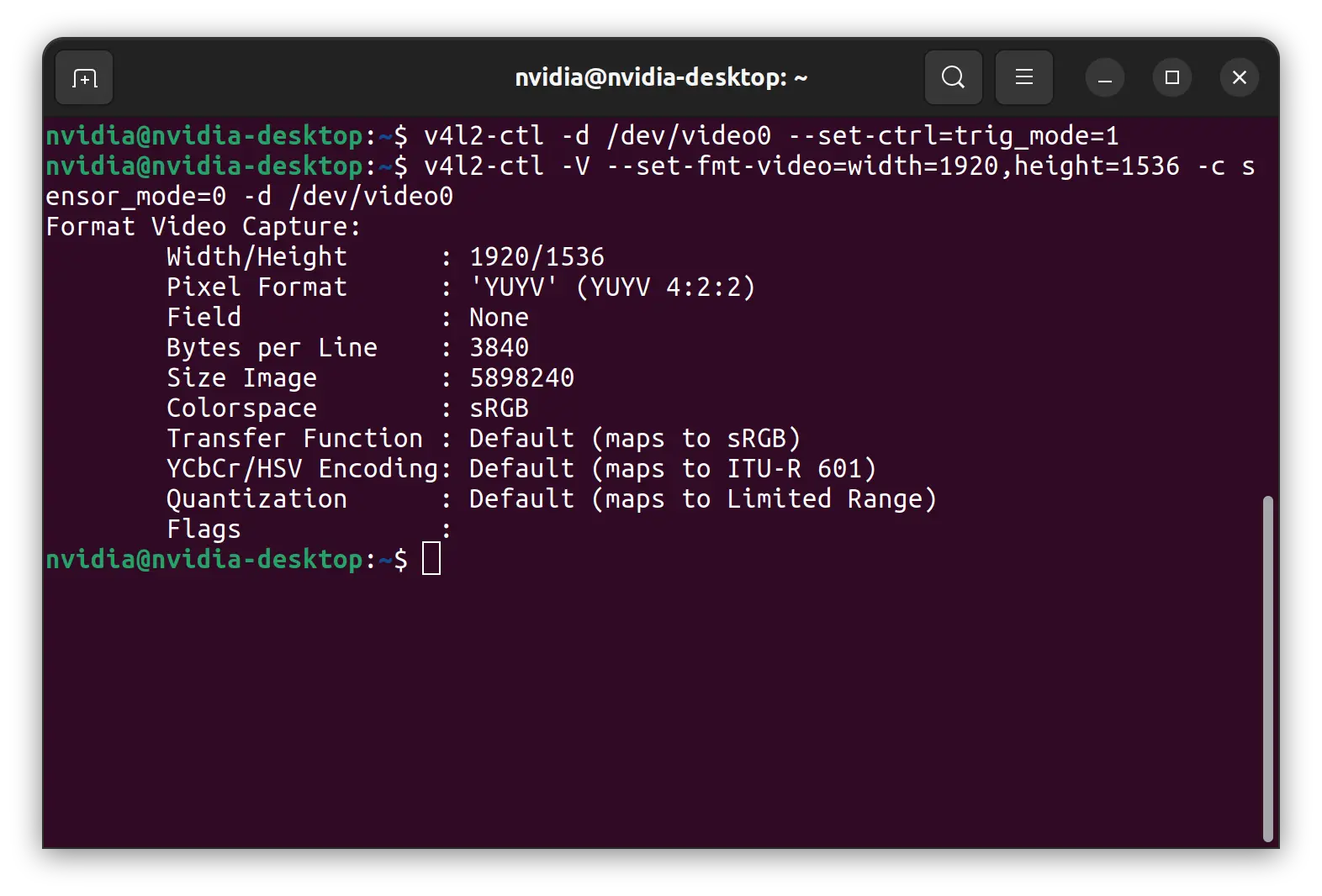
- Frame Synchronization
v4l2-ctl -d /dev/video0 --set-ctrl=trig_mode=1
You can toggle 'trig_mode=0' to disable frame synchronization. Or use 'trig_mode=1' to enable frame synchronization when you have multiple cameras connected.
- Video Format
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video0
Depend on which camera you are using, there might be different 'sensor_mode' as pre-defined here, mainly:
| Sensor Mode | Frame Type |
|---|---|
| 0 | YUYV8_1X16/1920x1536 |
| 1 | YUYV8_1X16/1920x1080 |
| 2 | YUYV8_1X16/3840x2160 |
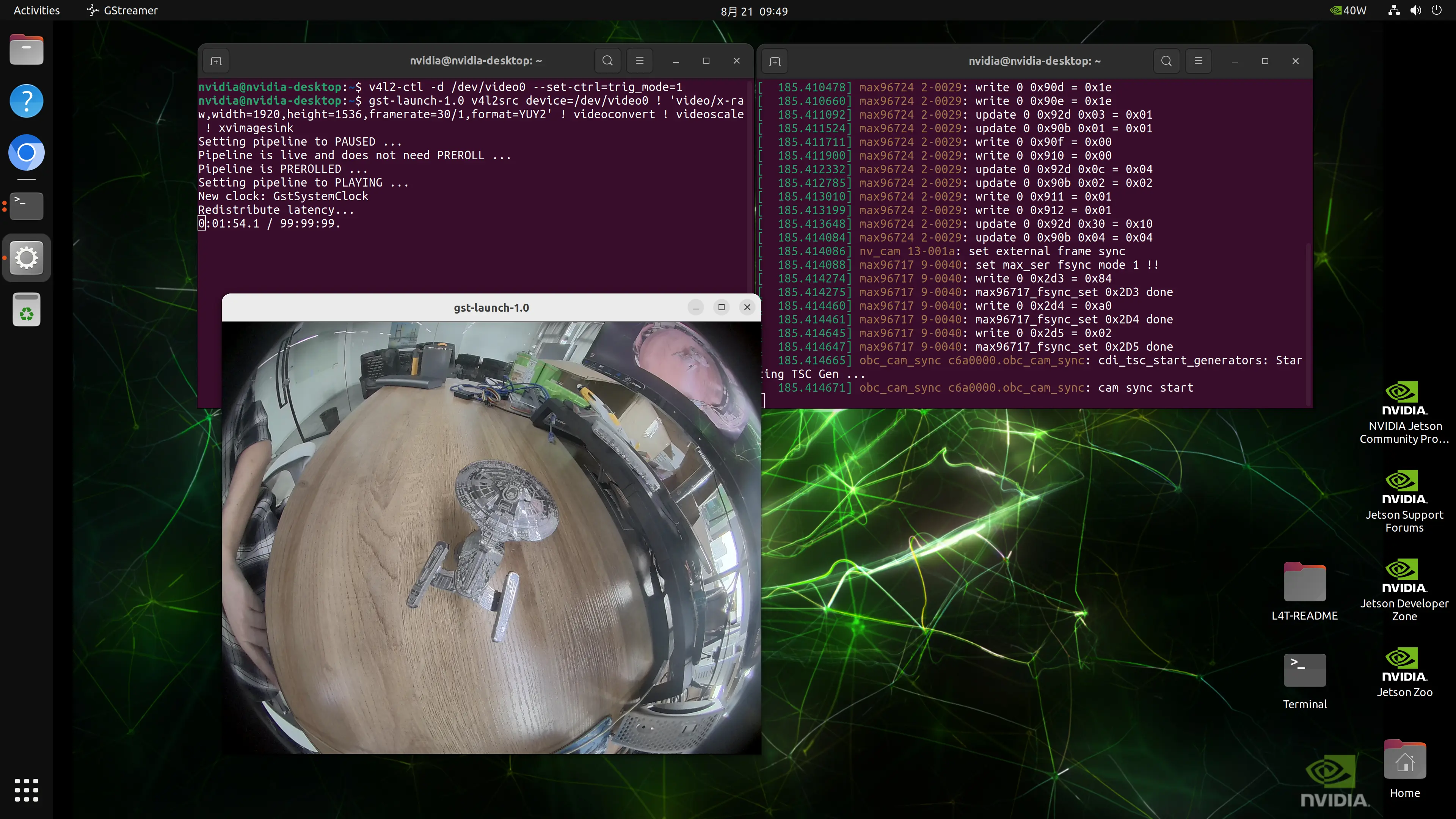
Gst Launch
Launch the viewer with gst-launch-1.0
gst-launch-1.0 v4l2src device=/dev/video0 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! videoscale ! xvimagesink
Additional Resources
Datasheet
- SG3S-ISX031C-GMSL2-F
- SG3S-ISX031C-GMSL2-H
- SG8S-AR0820C-5300-G2A-H
- SG2-AR0233C-5200-G2A-H
- SG2-IMX390C-5200-G2A-H
Tech Support & Product Discussion
Thank you for choosing our products! Make sure you follow us on below platforms to get latest news and support.
