Crowd Tracking & Counting
This guide is for NVIDIA Jetson Ubuntu 22 + JetPack 6.x environments, helping you quickly complete the deployment.
📋 Environment Requirements
- Device: NVIDIA Jetson series (Nano, Xavier, Orin, etc.)
- System: Ubuntu 22.x + JetPack 6.x
- Network: Able to access GitHub and Docker Hub
- Permissions:
sudoprivileges
If your device is not yet installed with the proper system environment, please refer to the official flashing guide for system installation and environment preparation:
JetPack Flashing Tutorial (Seeed Studio)
⚡ One-Click Deployment
Run the following command on your Jetson device terminal:
curl -fsSL https://raw.githubusercontent.com/Seeed-Studio/SenseCraft-AI_Server/refs/heads/jetson/scripts/install.sh | bash
💡 The script supports idempotent execution, meaning it is safe to run multiple times.
🔍 Deployment Process
The script automatically performs the following steps:
-
Install Docker (27.x)
- Check if Docker is installed
- If installed but not version 27.x → automatically uninstall and reinstall
- Configure NVIDIA Container Toolkit
- Set Docker default runtime to
nvidia
-
Install MQTT Broker
-
Install
mosquittoandmosquitto-clients -
Configure to allow external access:
listener 1883 0.0.0.0
allow_anonymous true
-
-
Deploy SenseCraft AI Server
- Clone the specified branch to
~/sensecraft-ai_server - Run
scripts/run.shto start the service - Download YOLOv11 model to
~/sensecraft-ai_server/models/yolo11n.pt
- Clone the specified branch to
🛡 Exception Handling
- Idempotent execution:
- Most issues (e.g., network interruptions, partial installation failures) can be fixed by simply re-running the script
- The script checks software versions and configurations, only installing missing or incorrect parts
- Rare issues (e.g., permanent apt source failure, unreachable external repository) require manual intervention
🖥 Starting & Accessing the Service
-
Start the service
cd ~/sensecraft-ai_server
sudo bash scripts/run.sh
📷 Command Line Output (Example)
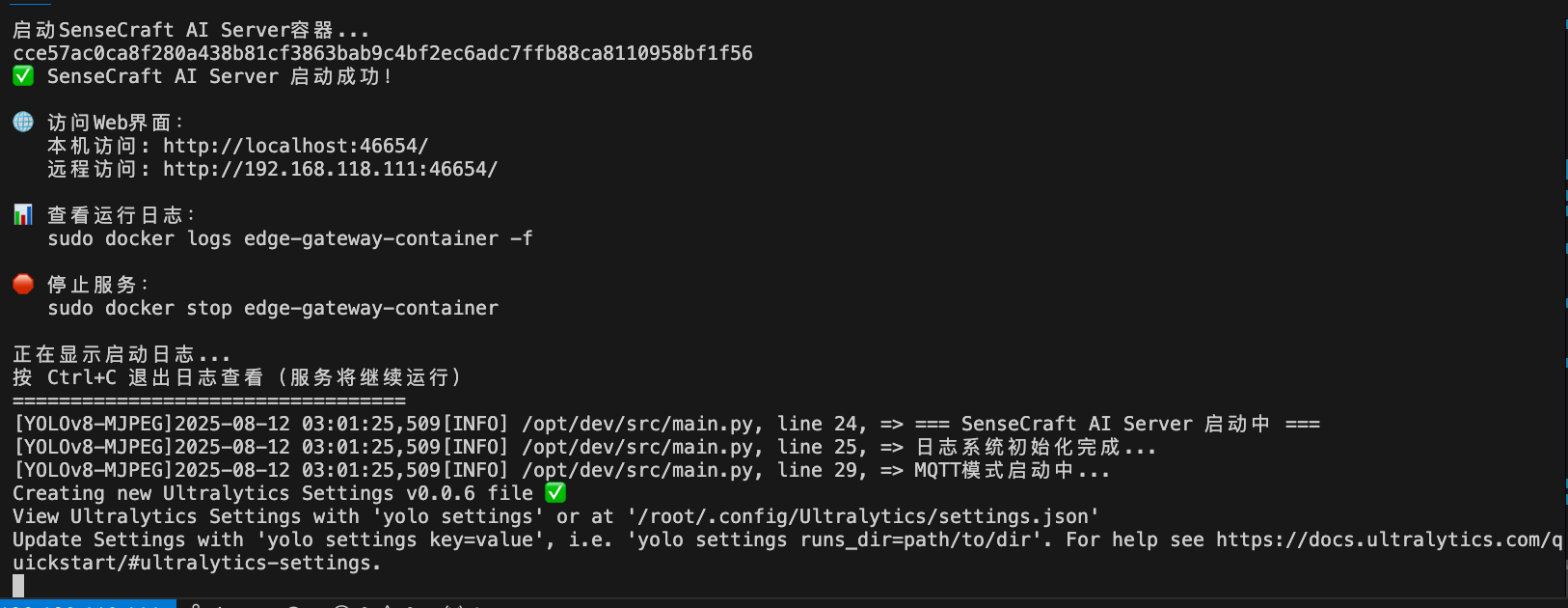
- Access the main page
-
In your browser:
http://<JETSON_IP>:46654 -
Default parameters are preconfigured; start to see results
-
📷 Web Interface (Example)
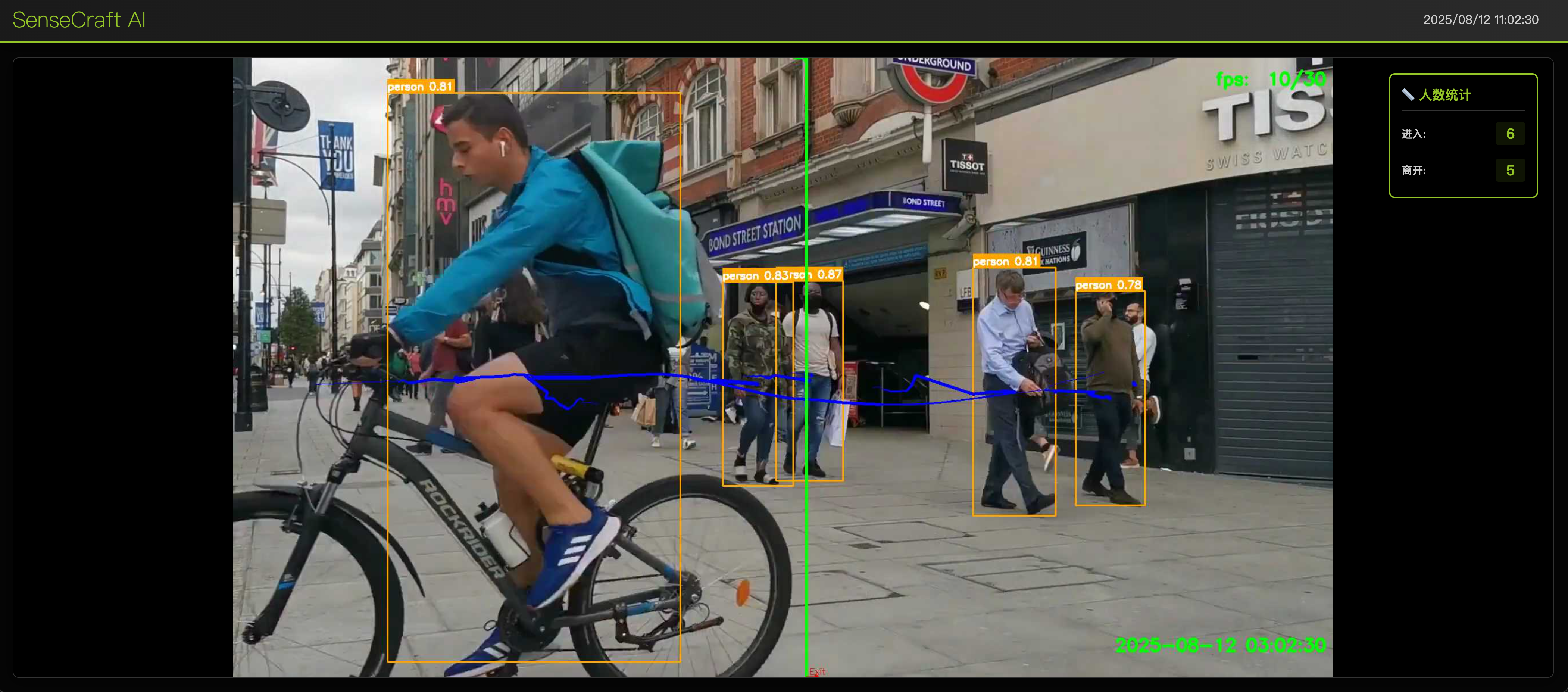
- Access the configuration page
-
In your browser:
http://<JETSON_IP>:46654/config.html -
Here you can adjust video sources, models, inference parameters, etc., and save them to the server
-
⚙ Configuration Page Overview
📷 Configuration Page (Example)

✨ Detection Result Retrieval
When deploying the service, a local MQTT broker is installed. Therefore, the recognition results can be obtained through the local MQTT.
📡 MQTT Message Push Topic
edgeai/result
🧩 MQTT Message Data Structure
{
"uuid": "0c7ef3d9-617d-4e6b-83f6-467f89b28d78", // result's uuid
"info": {
"person": 6 // object count
},
"line_crossing": {
"enter": 1, // enter count
"exit": 0 // exit count
}
}
🔧 Node-RED Configuration
It may be necessary to calibrate the IP of the MQTT broker. In this case, Node-RED is deployed in a container, so the docker0 address is used.

🔧 Node-RED Configuration (Full Flow)
It may be necessary to calibrate the IP of the MQTT broker.
In this case, Node-RED is deployed in a container, so the docker0 address is used.
[{
"id": "f7641cb7c6a84d23",
"type": "mqtt in",
"z": "827a3420678b76d2",
"name": "",
"topic": "edgeai/result",
"qos": "2",
"datatype": "auto-detect",
"broker": "0f948328c1975515",
"nl": false,
"rap": true,
"rh": 0,
"inputs": 0,
"x": 530,
"y": 620,
"wires": [
["c086c2dfcc39b708"]
]
},
{
"id": "c086c2dfcc39b708",
"type": "ui-template",
"z": "827a3420678b76d2",
"group": "e33e8e2eb3424d08",
"page": "",
"ui": "",
"name": "human tracking",
"order": 0,
"width": 0,
"height": 0,
"head": "",
"format": "<template>\n <div>\n <!-- Conditional Styling using Attribute Binding (\":\") -->\n <!-- and rendering content inside <tags></tags> with {{ }} -->\n <p> <span :style=\"{'color' : (count > 5 ? 'red' : 'green' )}\">Current Count: {{ msg.payload.info.person }}</span>\n <span style=\"margin-left:20px\"><b v-if=\"msg.payload.info.person > 5\">Too many!</b> </span>\n </p>\n <!-- Computed Rendering using Vue Computed Variables -->\n <p class=\"my-class\">enter: {{ msg.payload.line_crossing.enter }}</p>\n <p class=\"my-class\">exit: {{ msg.payload.line_crossing.exit }}</p>\n <!-- Conditional Rendering with \"v-if\" -->\n </div>\n</template>\n\n<script>\n export default {\n data() {\n // define variables available component-wide\n // (in <template> and component functions)\n return {\n count: 0\n }\n },\n watch: {\n // watch for any changes of \"count\"\n count: function () {\n if (this.count % 5 === 0) {\n this.send({payload: 'Multiple of 5'})\n }\n }\n },\n computed: {\n // automatically compute this variable\n // whenever VueJS deems appropriate\n formattedCount: function () {\n return this.count + ' Apples'\n }\n },\n methods: {\n // expose a method to our <template> and Vue Application\n increase: function () {\n this.count++\n }\n },\n mounted() {\n // code here when the component is first loaded\n },\n unmounted() {\n // code here when the component is removed from the Dashboard\n // i.e. when the user navigates away from the page\n }\n }\n</script>\n<style>\n /* define any styles here - supports raw CSS */\n .my-class {\n color: red;\n }\n</style>",
"storeOutMessages": true,
"passthru": true,
"resendOnRefresh": true,
"templateScope": "local",
"className": "",
"x": 740,
"y": 620,
"wires": [[]]
},
{
"id": "0f948328c1975515",
"type": "mqtt-broker",
"name": "",
"broker": "172.17.0.1",
"port": 1883,
"clientid": "",
"autoConnect": true,
"usetls": false,
"protocolVersion": 4,
"keepalive": 15,
"cleansession": true,
"autoUnsubscribe": true,
"birthTopic": "",
"birthQos": "0",
"birthPayload": "",
"birthMsg": {},
"closeTopic": "",
"closePayload": "",
"closeMsg": {},
"willTopic": "",
"willQos": "0",
"willPayload": "",
"willMsg": {},
"userProps": "",
"sessionExpiry": ""
},
{
"id": "e33e8e2eb3424d08",
"type": "ui-group",
"name": "人流追踪",
"page": "h1i2j3k4l5m6n7o8",
"width": "8",
"height": "8",
"order": -1,
"showTitle": true,
"className": "",
"visible": "true",
"disabled": "false",
"groupType": "default"
},
{
"id": "h1i2j3k4l5m6n7o8",
"type": "ui-page",
"name": "Frigate Page",
"ui": "f121584d21d465f1",
"path": "/frigate",
"icon": "",
"layout": "grid",
"theme": "6666b6af5668e7b2",
"breakpoints": [
{"name": "Default","px": "0","cols": "3"},
{"name": "Tablet","px": "576","cols": "6"},
{"name": "Small Desktop","px": "768","cols": "9"},
{"name": "Desktop","px": "1024","cols": "12"}
],
"order": 1,
"className": "",
"visible": "true",
"disabled": "false"
},
{
"id": "f121584d21d465f1",
"type": "ui-base",
"name": "My Dashboard",
"path": "/dashboard",
"headerContent": "page",
"titleBarStyle": "default",
"showReconnectNotification": true,
"notificationDisplayTime": 5,
"showDisconnectNotification": true,
"allowInstall": true
},
{
"id": "6666b6af5668e7b2",
"type": "ui-theme",
"name": "Default Theme",
"colors": {
"surface": "#ffffff",
"primary": "#0094CE",
"bgPage": "#eeeeee",
"groupBg": "#ffffff",
"groupOutline": "#cccccc"
},
"sizes": {
"density": "default",
"pagePadding": "12px",
"groupGap": "12px",
"groupBorderRadius": "4px",
"widgetGap": "12px"
}
},
{
"id": "e9696690fa075863",
"type": "global-config",
"env": [],
"modules": {
"@flowfuse/node-red-dashboard": "1.26.0"
}
}]
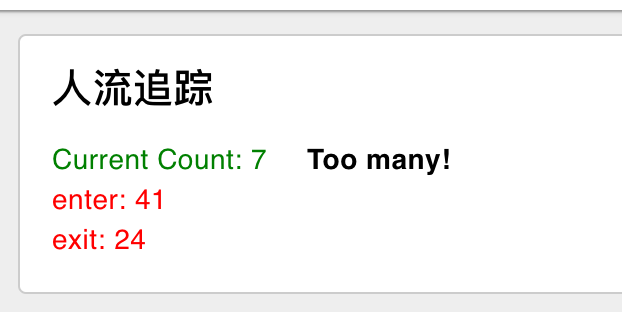
📊 Node-RED Dashboard Preview
Video Source
- Supports local video files, USB cameras (default first device), RTSP streams
- Supports MP4, AVI, MOV, MKV uploads
- View and delete uploaded video sources
AI Model
- Select from available AI inference models
- Supports
.pt,.pth,.onnx,.engineformats - View and delete uploaded models
Inference Parameters
- Confidence threshold: 0.1–1.0
- Max detections: 1–1000
- Half-precision inference: boosts speed (minimal difference for small models)
Display
- Show detection boxes (customizable color, default orange)
- Timestamp & FPS always enabled
Tracking
- Enable multi-object tracking
- Show trajectory lines with customizable length, thickness, and color
Tripwire Detection
- Supports horizontal or vertical tripwire (vertical recommended)
- Draw start/end points; enable display for real-time debugging
- Tolerance: 1–20 pixels
- Customizable color & thickness
- Show/hide and reset counter (resets when service restarts)
Configuration Management
- Save current config to the server (loaded at runtime)
- Export/import configuration files
- Restore default settings
🛠 Common Issues
| Issue | Cause | Solution |
|---|---|---|
Docker installation failed | Unstable network or source | Check network and re-run the script |
| Mosquitto cannot connect | Firewall/config issue | Ensure /etc/mosquitto/mosquitto.conf contains listener 1883 0.0.0.0 |
| YOLO model not downloaded | Network interruption | Delete ~/sensecraft-ai_server/models/yolo11n.pt and re-run the script |
📦 Uninstalling the Service
# Uninstall MQTT
sudo apt remove -y mosquitto mosquitto-clients
# Uninstall Docker
sudo apt-get purge -y docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin docker-ce-rootless-extras
# Remove service directory
rm -rf ~/sensecraft-ai_server
📚 References
- Jetson Flashing Guide
- SenseCraft-AI_Server Source Repository
- NVIDIA Jetson Docker Guide
- Mosquitto Official Documentation
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.