How to use the LeRobot-starai robotic arm in Lerobot
LeRobot is committed to providing models, datasets and tools for real-world robotics in PyTorch. Its aim is to reduce the entry barrier of robotics, enabling everyone to contribute and benefit from sharing datasets and pretrained models. LeRobot integrates cutting-edge methodologies validated for real-world application, centering on imitation learning. It has furnished a suite of pre-trained models, datasets featuring human-gathered demonstrations, and simulation environments, enabling users to commence without the necessity of robot assembly. In the forthcoming weeks, the intention is to augment support for real-world robotics on the most cost-effective and competent robots presently accessible.
Product Introduction
-
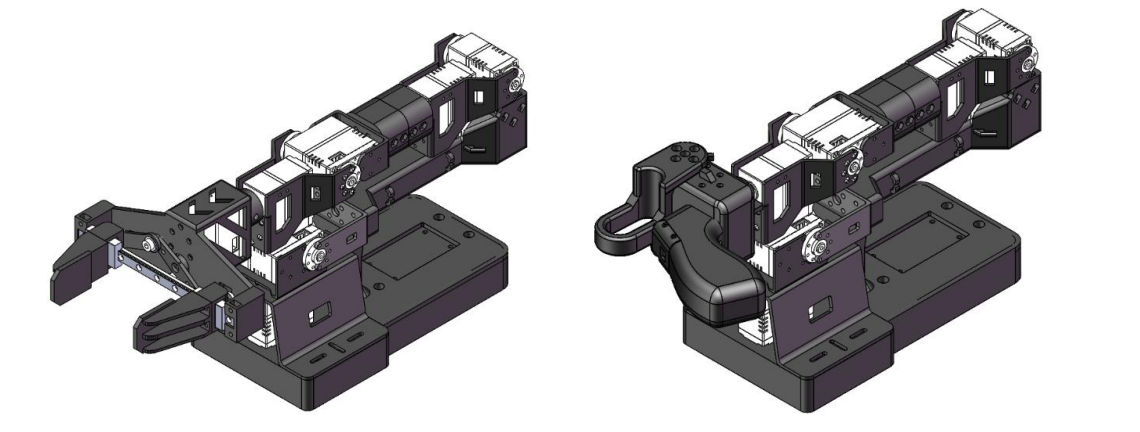
Open-Source & Easy for Secondary Development This series of servo motors, provided by Fashion Robotics, offers an open-source, easily customizable 6+1 degrees of freedom robotic arm solution.
-
LeRobot Platform Integration Support It's specifically designed for integration with the LeRobot platform. This platform provides PyTorch models, datasets, and tools for imitation learning in real-world robotics tasks, including data collection, simulation, training, and deployment.
-
Abundant Learning Resources We offer comprehensive open-source learning resources, including environment setup, installation and debugging guides, and custom grasping task examples to help users quickly get started and develop robotic applications.
-
Nvidia Platform Compatibility Deployment is supported via the reComputer Mini J4012 Orin NX 16GB platform.
Key Features
- Ready to Go -- No Assembly Required. Just Unbox and Dive into the World of AI.
- 6+1 Degrees of Freedom and a 470mm Reach -- Built for Versatility and Precision.
- Powered by Dual Brushless Bus Servos -- Smooth, Silent, and Strong with up to 300g Payload.
- Parallel Gripper with 66mm Maximum Opening -- Modular Fingertips for Quick-Replace Flexibility.
- Exclusive Hover Lock Technology -- Instantly Freeze Leader Arm at Any Position with a Single Press.
Specifications
| Item | Follower Arm | Viola | Leder Arm |Violin |
|---|---|---|
| Degrees of Freedom | 6 | 6+1 |
| Reach | 470mm | 470mm |
| Span | 940mm | 940mm |
| Repeatability | 2mm | - |
| Working Payload | 300g (with 70% Reach) | - |
| Servos | RX8-U50H-M x2 RA8-U25H-M x4 RA8-U26H-M x1 | RX8-U50H-M x2 RA8-U25H-M x4 RA8-U26H-M x1 |
| Parallel Gripper Ki | ✅ | - |
| Wrist Rotate | Yes | Yes |
| Hold at any Position | Yes | Yes (with handle button) |
| Wrist Camera Mount | ✅ | - |
| Works with LeRobot | ✅ | ✅ |
| Works with ROS 2 | ✅ | / |
| Works with MoveIt | ✅ | / |
| Works with Gazebo | ✅ | / |
| Communication Hub | UC-01 | UC-01 |
| Power Supply | 12v/120w | 12v/120w |
For more information about servo motors, please visit the following link.
Initial environment setup
For Ubuntu x86:
- Ubuntu 22.04
- CUDA 12+
- Python 3.10
- Torch 2.6
For Jetson Orin:
- Jetson JetPack 6.2
- Python 3.10
- Torch 2.6
Installation and Debugging
Install LeRobot
Environments such as pytorch and torchvision need to be installed based on your CUDA.
- Install Miniconda: For Jetson:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
Or, For X86 Ubuntu 22.04:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
source ~/miniconda3/bin/activate
conda init --all
- Create and activate a fresh conda environment for lerobot
conda create -y -n lerobot python=3.10 && conda activate lerobot
- Clone Lerobot:
git clone https://github.com/Seeed-Projects/lerobot.git ~/lerobot
- When using miniconda, install ffmpeg in your environment:
conda install ffmpeg -c conda-forge
This usually installs ffmpeg 7.X for your platform compiled with the libsvtav1 encoder. If libsvtav1 is not supported (check supported encoders with ffmpeg -encoders), you can:
- [On any platform] Explicitly install ffmpeg 7.X using:
conda install ffmpeg=7.1.1 -c conda-forge
- [On Linux only] Install ffmpeg build dependencies and compile ffmpeg from source with libsvtav1, and make sure you use the corresponding ffmpeg binary to your install with which ffmpeg.
- Install LeRobot with dependencies for the feetech motors:
cd ~/lerobot && pip install -e ".[feetech]"
For Jetson Jetpack devices (please make sure to install Pytorch-gpu and Torchvision from step 5 before executing this step):
conda install -y -c conda-forge "opencv>=4.10.0.84" # Install OpenCV and other dependencies through conda, this step is only for Jetson Jetpack 6.0+
conda remove opencv # Uninstall OpenCV
pip3 install opencv-python==4.10.0.84 # Then install opencv-python via pip3
conda install -y -c conda-forge ffmpeg
conda uninstall numpy
pip3 install numpy==1.26.0 # This should match torchvision
- Check Pytorch and Torchvision
Since installing the lerobot environment via pip will uninstall the original Pytorch and Torchvision and install the CPU versions of Pytorch and Torchvision, you need to perform a check in Python.
import torch
print(torch.cuda.is_available())
If the printed result is False, you need to reinstall Pytorch and Torchvision according to the official website tutorial.
If you are using a Jetson device, install Pytorch and Torchvision according to this tutorial.
Unboxing the Robotic Arm
Robotic Arm Kit Includes
-
leader arm
-
follower arm
-
powerx2
Configure Arm Port
Run the following command in the terminal to find USB ports associated to your arms:
python lerobot/scripts/find_motors_bus_port.py
Remember to remove the usb, otherwise the interface will not be detected.
For example:
- Example output when identifying the leader arm's port (e.g.,
/dev/tty.usbmodem575E0031751on Mac, or possibly/dev/ttyACM0on Linux): - Example output when identifying the follower arm's port (e.g.,
/dev/tty.usbmodem575E0032081on Mac, or possibly/dev/ttyACM1on Linux):
You might need to give access to the USB ports by running:
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1
Open-file
lerobot\lerobot\common\robot_devices\robots\configs.py
Use the Ctrl+F to search for starai and locate the following code. Then, you need to modify the port settings of follower_arms and leader_arms to match the actual port settings.
@RobotConfig.register_subclass("starai")
@dataclass
class StaraiRobotConfig(ManipulatorRobotConfig):
calibration_dir: str = ".cache/calibration/starai"
max_relative_target: int | None = None
leader_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": StaraiMotorsBusConfig(
port="/dev/ttyUSB1",##### UPDATE HEARE
interval = 100,
motors={
# name: (index, model)
"joint1": [0, "rx8-u50"],
"joint2": [1, "rx8-u50"],
"joint3": [2, "rx8-u50"],
"joint4": [3, "rx8-u50"],
"joint5": [4, "rx8-u50"],
"joint6": [5, "rx8-u50"],
"gripper": [6, "rx8-u50"],
},
),
}
)
follower_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": StaraiMotorsBusConfig(
port="/dev/ttyUSB0",##### UPDATE HEARE
interval = 100,
motors={
# name: (index, model)
"joint1": [0, "rx8-u50"],
"joint2": [1, "rx8-u50"],
"joint3": [2, "rx8-u50"],
"joint4": [3, "rx8-u50"],
"joint5": [4, "rx8-u50"],
"joint6": [5, "rx8-u50"],
"gripper": [6, "rx8-u50"],
},
),
}
)
Set Runtime Parameters
Open-file
lerobot\lerobot\common\robot_devices\robots\configs.py
Use the Ctrl + F to search for starai and locate the following code. Then, you need modify the interval setting of follower_arms.
- Description: The faster the follower responds when the time interval becomes smaller, and more stable the follower runs when the time interval becomes larger.
- Value Range: Integer, greater than 50 and less than 2000.
It is recommended to set the interval to 100 (default value) during teleoperation for better responsiveness, and to 1000 during autonomous execution in evaluation phases to ensure more stable motion.
@RobotConfig.register_subclass("starai")
@dataclass
class StaraiRobotConfig(ManipulatorRobotConfig):
calibration_dir: str = ".cache/calibration/starai"
max_relative_target: int | None = None
leader_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": StaraiMotorsBusConfig(
port="/dev/ttyUSB1",
interval = 100,
motors={
# name: (index, model)
"joint1": [0, "rx8-u50"],
"joint2": [1, "rx8-u50"],
"joint3": [2, "rx8-u50"],
"joint4": [3, "rx8-u50"],
"joint5": [4, "rx8-u50"],
"joint6": [5, "rx8-u50"],
"gripper": [6, "rx8-u50"],
},
),
}
)
follower_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": StaraiMotorsBusConfig(
port="/dev/ttyUSB0",
interval = 100, ##### UPDATE HEARE
motors={
# name: (index, model)
"joint1": [0, "rx8-u50"],
"joint2": [1, "rx8-u50"],
"joint3": [2, "rx8-u50"],
"joint4": [3, "rx8-u50"],
"joint5": [4, "rx8-u50"],
"joint6": [5, "rx8-u50"],
"gripper": [6, "rx8-u50"],
},
),
}
)
Calibrate
Normally, the robotic arm is pre-calibrated in factory and does not require recalibration. If a joint motor is found to remain at a limit position for a long period, please contact us to obtain the calibration file and perform recalibration again.
Note
If the ttyUSB0 serial port cannot be identified, try the following solutions:
List all USB ports.
lsusb

Once identified, check the information of the ttyusb.
sudo dmesg | grep ttyUSB

The last line indicates a disconnection because brltty is occupying the USB. Removing brltty will resolve the issue.
sudo apt remove brltty

Finally,use chmod command.
sudo chmod 666 /dev/ttyUSB0
Teleoperate
Simple teleop Then you are ready to teleoperate your robot! Run this simple script (it won't connect and display the cameras):
python lerobot/scripts/control_robot.py \
--robot.type=so101 \
--robot.cameras='{}' \
--control.type=teleoperate
After the program starts, the Hold button remains functional.
Add cameras
After inserting your two USB cameras, run the following script to check the port numbers of the cameras. It is important to remember that the camera must not be connected to a USB Hub; instead, it should be plugged directly into the device. The slower speed of a USB Hub may result in the inability to read image data.
python lerobot/common/robot_devices/cameras/opencv.py \
--images-dir outputs/images_from_opencv_cameras
The terminal will print out the following information. For example, the laptop camera is index 0, and the USB camera is index 2.
Mac or X86 Ubuntu detected. Finding available camera indices through scanning all indices from 0 to 60
[...]
Camera found at index 0
Camera found at index 2
[...]
Connecting cameras
OpenCVCamera(0, fps=30.0, width=640, height=480, color_mode=rgb)
OpenCVCamera(2, fps=30.0, width=640, height=480, color_mode=rgb)
Saving images to outputs/images_from_opencv_cameras
Frame: 0000 Latency (ms): 39.52
[...]
Frame: 0046 Latency (ms): 40.07
Images have been saved to outputs/images_from_opencv_cameras
You can find the pictures taken by each camera in the outputs/images_from_opencv_cameras directory, and confirm the port index information corresponding to the cameras at different positions. Then complete the alignment of the camera parameters in the lerobot/lerobot/common/robot_devices/robots/configs.py file.
@RobotConfig.register_subclass("starai")
@dataclass
class StaraiRobotConfig(ManipulatorRobotConfig):
calibration_dir: str = ".cache/calibration/starai"
cameras: dict[str, CameraConfig] = field(
default_factory=*lambda*: {
"laptop": OpenCVCameraConfig(
camera_index=2, ##### UPDATE HEARE
fps=30,
width=640,
height=480,
),
"phone": OpenCVCameraConfig(
camera_index=0, ##### UPDATE HEARE
fps=30,
width=640,
height=480,
),
}
)
mock: bool = False
Then you will be able to display the cameras on your computer while you are teleoperating:
python lerobot/scripts/control_robot.py \
--robot.type=starai \
--control.type=teleoperate \
--control.display_data=true
Record the dataset
Once you're familiar with teleoperation, you can record your first dataset.
If you want to use the Hugging Face hub features for uploading your dataset and you haven't previously done it, make sure you've logged in using a write-access token, which can be generated from the Hugging Face settings:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credential
Store your Hugging Face repository name in a variable to run these commands:
HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USER
If you don't want to use the Hugging Face hub features for uploading your dataset. You can choose --control.push_to_hub=false.
Record 20 episodes and don't upload your dataset to the hub:
python lerobot/scripts/control_robot.py \
--robot.type=starai \
--control.type=record \
--control.fps=30 \
--control.single_task="Grasp a lego block and put it in the bin." \
--control.repo_id=${HF_USER}/starai \
--control.tags='["starai","tutorial"]' \
--control.warmup_time_s=5 \
--control.episode_time_s=30 \
--control.reset_time_s=30 \
--control.num_episodes=20 \
--control.display_data=true \
--control.push_to_hub=false
You will see a lot of lines appearing like this one:
INFO 2024-08-10 15:02:58 ol_robot.py:219 dt:33.34 (30.0hz) dtRlead: 5.06 (197.5hz) dtWfoll: 0.25 (3963.7hz) dtRfoll: 6.22 (160.7hz) dtRlaptop: 32.57 (30.7hz) dtRphone: 33.84 (29.5hz)
Parameter Explanations
- wormup-time-s: It refers to the initialization time.
- episode-time-s: It represents the time for collecting data each time.
- reset-time-s: It is the preparation time between each data collection.
- num-episodes: It indicates how many groups of data are expected to be collected.
- push-to-hub: It determines whether to upload the data to the HuggingFace Hub.
-
"If you want to save the data locally (
--control.push_to_hub=false), replace--control.repo_id=${HF_USER}/so101_testwith a custom local folder name, such as--control.repo_id=seeed_123/so101_test. It will then be stored in the system's home directory at~/.cache/huggingface/lerobot." -
If you uploaded your dataset to the hub with
--control.push_to_hub=true, you can visualize your dataset online by copy pasting your repo id given by: -
Press right arrow → at any time during episode recording to early stop and go to resetting. Same during resetting, to early stop and to go to the next episode recording.
-
Press left arrow ← at any time during episode recording or resetting to early stop, cancel the current episode, and re-record it.
-
Press escape ESC at any time during episode recording to end the session early and go straight to video encoding and dataset uploading.
-
Note: You can resume recording by adding --control.resume=true. Also if you didn't push your dataset yet, add --control.local_files_only=true. You will need to manually delete the dataset directory if you want to start recording from scratch.
-
Once you're comfortable with data recording, you can create a larger dataset for training. A good starting task is grasping an object at different locations and placing it in a bin. We suggest recording at least 50 episodes, with 10 episodes per location. Keep the cameras fixed and maintain consistent grasping behavior throughout the recordings. Also make sure the object you are manipulating is visible on the camera's. A good rule of thumb is you should be able to do the task yourself by only looking at the camera images.
-
In the following sections, you’ll train your neural network. After achieving reliable grasping performance, you can start introducing more variations during data collection, such as additional grasp locations, different grasping techniques, and altering camera positions.
-
Avoid adding too much variation too quickly, as it may hinder your results.
-
On Linux, if the left and right arrow keys and escape key don't have any effect during data recording, make sure you've set the $DISPLAY environment variable. See pynput limitations.
Visualize the dataset
The dataset is saved locally. If you upload with --control.push_to_hub=false , you can also visualize it locally with:
python lerobot/scripts/visualize_dataset_html.py \
--repo-id starai/starai_test \
Here, starai is the custom repo_id name defined when collecting data.
Replay an episode
Now try to replay the first episode on your robot:
python lerobot/scripts/control_robot.py \
--robot.type=starai \
--control.type=replay \
--control.fps=30 \
--control.repo_id=starai/starai \
--control.episode=0
--control.local_files_only=true
If you didn't push your dataset yet, add --control.local_files_only=true .
Train a policy
To train a policy to control your robot, use the python lerobot/scripts/train.py script. A few arguments are required. Here is an example command:
python lerobot/scripts/train.py \
--dataset.repo_id=starai/starai \
--policy.type=act \
--output_dir=outputs/train/act_starai \
--job_name=act_starai \
--policy.device=cuda \
--wandb.enable=false
Let's explain it:
- We use our local dataset as argument
--dataset.repo_id=starai/starai. - We provide the policy using
policy.type=act, which will load the configuration fromlerobot/lerobot/common/policies/act/configuration_act.py. Currently, ACT has been tested, but you can also try other policies such as diffusion, pi0, pi0fast, tdmpc, and vqbet. - We provided policy.device=cuda since we are training on a Nvidia GPU, but you could use policy.device=mps to train on Apple silicon.
- We provided
wandb.enable=trueto use Weights and Biases for visualizing training plots. This is optional but if you use it, make sure you are logged in by runningwandb login.
If you want to train on a local dataset, make sure the repo_id matches the one used during data collection. Training should take several hours. You will find checkpoints inoutputs/train/act_starai_test/checkpoints .
To resume training from a checkpoint, below is an example command to resume from last checkpoint of the act_starai :
python lerobot/scripts/train.py \
--config_path=outputs/train/act_starai_test/checkpoints/last/pretrained_model/train_config.json \
--resume=true
Evaluate your policy
You can use the record function from lerobot/scripts/control_robot.py , but with a policy checkpoint as input. For instance, run this command to record 10 evaluation episodes:
python lerobot/scripts/control_robot.py \
--robot.type=starai \
--control.type=record \
--control.fps=30 \
--control.single_task="Grasp a lego block and put it in the bin." \
--control.repo_id=starai/eval_act_starai \
--control.tags='["tutorial"]' \
--control.warmup_time_s=5 \
--control.episode_time_s=30 \
--control.reset_time_s=30 \
--control.num_episodes=10 \
--control.push_to_hub=false \
--control.policy.path=outputs/train/act_starai_test/checkpoints/last/pretrained_model
As you can see, this is almost identical to the command previously used to record the training dataset. There are only two differences:
- There is an additional
--control.policy.pathargument which indicates the path to your policy checkpoint (e.g.outputs/train/eval_act_starai/checkpoints/last/pretrained_model). You can also use the model repository if you uploaded a model checkpoint to the hub (e.g.${HF_USER}/eval_act_starai). - The name of dataset begins by
evalto reflect that you are running inference (e.g.${HF_USER}/eval_act_starai).
FAQ
-
If you are following this documentation/tutorial, please git clone the recommended GitHub repository
https://github.com/Seeed-Projects/lerobot.git. -
If you encounter the following error, you need to check whether the robotic arm connected to the corresponding port is powered on and whether the bus servos have any loose or disconnected cables.
ConnectionError: Read failed due to comunication eror on port /dev/ttyACM0 for group key Present_Position_Shoulder_pan_Shoulder_lift_elbow_flex_wrist_flex_wrist_roll_griper: [TxRxResult] There is no status packet! -
If you have repaired or replaced any parts of the robotic arm, please completely delete the
~/lerobot/.cache/huggingface/calibration/so100folder and recalibrate the robotic arm. -
If the remote control functions normally but the remote control with Camera fails to display the image interface, you can find here
-
If you encounter libtiff issues during dataset remote operation, please update the libtiff version.
conda install libtiff==4.5.0 #for Ubuntu 22.04 is libtiff==4.5.1 -
After executing the Lerobot Installation, the GPU version of pytorch may be automatically uninstalled, so you need to manually install torch-gpu.
-
For Jetson, please first install Pytorch and Torchvsion before executing
conda install -y -c conda-forge ffmpeg, otherwise, when compiling torchvision, an ffmpeg version mismatch issue may occur. -
If the following problem occurs, it means that your computer does not support this video codec format. You need to modify line 134 in the file
lerobot/lerobot/common/datasets /video_utils.pyby changing the value ofvcodec: str = "libsvtav1"tolibx264orlibopenh264. Different computers may require different parameters, so you can try various options. Issues 705[vost#0:0 @ 0x13207240] Unknown encoder 'libsvtav1' [vost#0:0 @ 0x13207240] Error selecting an encoder Error opening output file /home/han/.cache/huggingface/lerobot/lyhhan/so100_test/videos/chunk-000/observation.images.laptop/episode_000000.mp4. Error opening output files: Encoder not found -
Important!!! If during execution the servo's cable becomes loose, please restore the servo to its initial position and then reconnect the servo cable. You can also individually calibrate a servo using the Servo Initialization Command, ensuring that only one cable is connected between the servo and the driver board during individual calibration. If you encounter
Auto-correct calibration of motor 'wrist roll' by shifting value by 1 full turns, from '-270 < -312.451171875 < 270degrees' to'-270<-312.451171875 < 270 degrees'.or other errors during the robotic arm calibration process related to angles and exceeding limit values, this method is still applicable.
-
Training 50 sets of ACT data on an 8G 3060 laptop takes approximately 6 hours, while on a 4090 or A100 computer, training 50 sets of data takes about 2–3 hours.
-
During data collection, ensure that the camera's position, angle, and environmental lighting remain stable, and minimize capturing excessive unstable backgrounds and pedestrians; otherwise, significant environmental changes during deployment may cause the robotic arm to fail to grasp properly.
-
Ensure that the
num-episodesparameter in the data collection command is set to collect sufficient data, and do not manually pause midway. This is because the mean and variance of the data are calculated only after data collection is complete, which is necessary for training. -
If the program prompts that it cannot read the USB camera image data, please ensure that the USB camera is not connected to a hub. The USB camera must be directly connected to the device to ensure a fast image transmission rate.
If you encounter software issues or environment dependency problems that cannot be resolved, in addition to checking the FAQ section at the end of this tutorial, please promptly report the issue to the LeRobot platform or the LeRobot Discord channel.
Citation
矽递科技英文Wiki文档:[How to use the SO10xArm robotic arm in Lerobot | Seeed Studio Wiki](如何在 Lerobot 中使用 SO100/101Arm 机器人手臂 | Seeed Studio Wiki)
Huggingface Project:Lerobot
ACT or ALOHA:Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
VQ-BeT:VQ-BeT: Behavior Generation with Latent Actions
Diffusion Policy:Diffusion Policy
TD-MPC:TD-MPC