Using Wio Terminal as a Mouse
This wiki introduces how to use the Wio Terminal as a simple mouse. This can be used to simulate mouse movements such as up,down,left and right. Furthermore left /right mouse button clicks, up/ down rolls can be implemented as well.
Installing Libraries
This example also requires an additional Arduino mouse library:
Visit the Arduino Mouse Library repository and download the entire repo to your local drive.
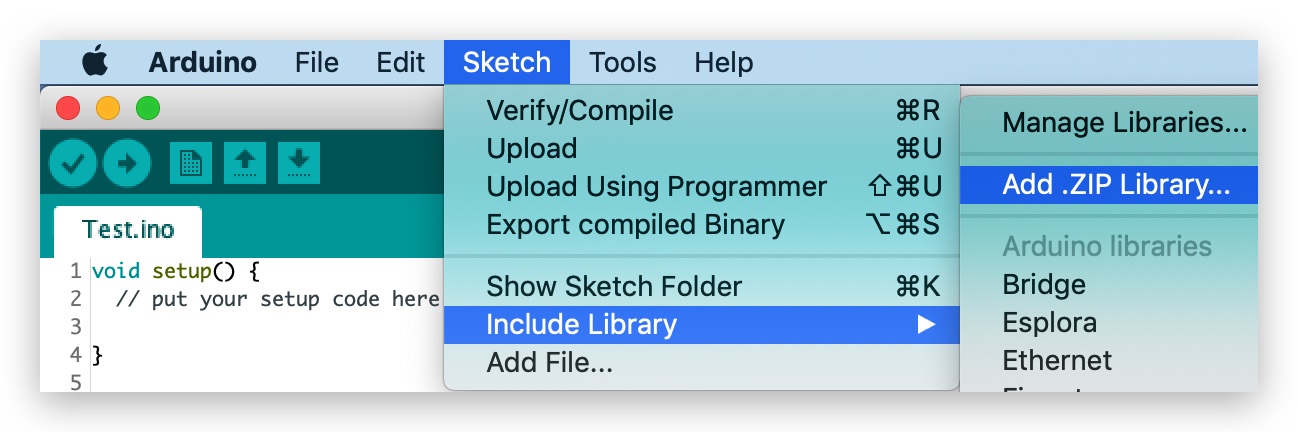
Now, the library can be installed to the Arduino IDE. Open the Arduino IDE, and click
sketch->Include Library->Add .ZIP Library, and choose theMouse-masterfile that you have just downloaded.
Complete Code
Please check the following code or from github here. Also, for more functionality, please refer to the official mouse functions from Arduino.
/*
* A demo for Wio Terminal to simulate mouse by buttons.
* Such as Mouse Up, Mouse Down, Mouse Left, Mouse Right,
* Click the left mouse button, Click the right mouse button,
* Up roll, Down roll and etc.
*
* Copyright (c) 2020 seeed technology co., ltd.
* Author : weihong.cai ([email protected])
* Create Time : July 2020
* Change Log :
*
* The MIT License (MIT)
*
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software istm
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
* AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
* OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS INcommInterface
* THE SOFTWARE.
*
* Usage(in Wio Terminal):
* Press the WIO_5S_UP --------------------> Mouse Up
* Press the WIO_5S_DOWN --------------------> Mouse Down
* Press the WIO_5S_LEFT --------------------> Mouse Left
* Press the WIO_5S_RIGHT --------------------> Mouse Right
* Press the BUTTON_3 ------------------------> Click the left mouse button
* Press the BUTTON_2 ------------------------> Click the right mouse button
* Press the WIO_5S_PRESS and WIO_5S_UP ----> Up roll
* Press the WIO_5S_PRESS and WIO_5S_DOWN ----> Down roll
*
* Some tips:
* 1. If your PC unables to recognize USB device leading the Wio Terminal can’t work.
* You can solve this problem through updating your ArduinoCore.
* Please follow this: https://forum.seeedstudio.com/t/seeeduino-xiao-cant-simulate-keys-pressed/252819/6?u=weihong.cai
*
* You can know more about the Wio Terminal from: https://wiki.seeedstudio.com/Wio-Terminal-Getting-Started/
* If you have any questions, you can leave a message on the forum: https://forum.seeedstudio.com
*/
#include "Mouse.h"
/*----------------define the button pins---------------------------*/
const int upButton = WIO_5S_UP;
const int downButton = WIO_5S_DOWN;
const int leftButton = WIO_5S_LEFT;
const int rightButton = WIO_5S_RIGHT;
const int mouseWheel = WIO_5S_PRESS;
const int mouseBttonLeft = BUTTON_3;
const int mouseBttonRight = BUTTON_2;
// output range of X or Y movement; affects movement speed
int range = 2;
// response delay of the mouse, in ms
int responseDelay = 5;
// the time record paramas
unsigned long _currentMillis;
unsigned long _previousMillis;
void setup() {
// initialize the buttons' inputs:
pinMode(upButton, INPUT);
pinMode(downButton, INPUT);
pinMode(leftButton, INPUT);
pinMode(rightButton, INPUT);
pinMode(mouseWheel, INPUT);
pinMode(mouseBttonLeft, INPUT);
pinMode(mouseBttonRight, INPUT);
// initialize mouse control:
Mouse.begin();
}
void loop() {
// read the button state:
int upState = digitalRead(upButton);
int downState = digitalRead(downButton);
int rightState = digitalRead(rightButton);
int leftState = digitalRead(leftButton);
int clickState_mouseWheel = digitalRead(mouseWheel);
int clickState_mouseButtonLeft = digitalRead(mouseBttonLeft);
int clickState_mouseButtonRight = digitalRead(mouseBttonRight);
// calculate the movement distance based on the button states:
int xDistance = (leftState - rightState) * range;
int yDistance = (upState - downState) * range;
/*------------------Mouse Move--------------------------------------*/
// if X or Y is non-zero, move:
if ((xDistance != 0) || (yDistance != 0)) {
Mouse.move(xDistance, yDistance, 0);
}
/*-------------Mouse Button Left Click------------------------------*/
// if the mouse button left is pressed:
if (clickState_mouseButtonLeft == LOW) {
// if the mouse is not pressed, press it:
if (!Mouse.isPressed(MOUSE_LEFT)) {
Mouse.press(MOUSE_LEFT);
//Mouse.click(MOUSE_LEFT);
}
}
// else the mouse button left is not pressed:
else {
// if the mouse is pressed, release it:
if (Mouse.isPressed(MOUSE_LEFT)) {
Mouse.release(MOUSE_LEFT);
}
}
/*-------------Mouse Button Right Click-----------------------------*/
// if the mouse button right is pressed:
if (clickState_mouseButtonRight == LOW) {
// if the mouse is not pressed, press it:
if (!Mouse.isPressed(MOUSE_RIGHT)) {
Mouse.press(MOUSE_RIGHT);
//Mouse.click(MOUSE_RIGHT);
}
}
// else the mouse button right is not pressed:
else {
// if the mouse is pressed, release it:
if (Mouse.isPressed(MOUSE_RIGHT)) {
Mouse.release(MOUSE_RIGHT);
}
}
/*------------------Up roll----------------------------------------*/
if ((upState == LOW) && (clickState_mouseWheel == LOW)) {
Mouse.move(0, 0, 1);
My_delay(200);
}
/*------------------Down roll--------------------------------------*/
if ((downState == LOW) && (clickState_mouseWheel == LOW)) {
Mouse.move(0, 0, -1);
My_delay(200);
}
/*-----------------------------------------------------------------*/
// a delay so the mouse doesn't move too fast:
My_delay(responseDelay);
}
// a delay function uses millis()
void My_delay(int Time)
{
while((_currentMillis - _previousMillis) <= Time)
{
_currentMillis = millis();
}
_previousMillis = _currentMillis;
}