Grove - IMU 10DOF v2.0
この文書は AI によって翻訳されています。内容に不正確な点や改善すべき点がございましたら、文書下部のコメント欄または以下の Issue ページにてご報告ください。
https://github.com/Seeed-Studio/wiki-documents/issues
Grove-IMU 10DOF v2.0は、Grove-IMU-10DOFのアップグレードバージョンであり、BMP180をBMP280に置き換えています。広く採用されているBMP180の後継機であるBMP280は、正確な圧力測定を必要とするすべてのアプリケーションで高性能を発揮します。このモジュールはMPU-9250とBMP280をベースにしており、MPU-9250は3軸ジャイロスコープ、3軸加速度計、3軸磁力計、およびデジタルモーションプロセッサ(DMP)を組み合わせた9軸モーショントラッキングデバイスです。一方、BMP280は消費者向けアプリケーション用の高精度で超低消費電力のデジタル圧力センサーです。このモジュールは、スマートフォン、タブレット、ウェアラブルデバイスのアプリケーションに非常に適しています。

バージョン
| 製品バージョン | 変更点 | リリース日 |
|---|---|---|
| Grove - IMU 10DOF | MPU-9250 と BMP180 をベースに構築 | 2015年3月 |
| Grove - IMU 10DOF v2.0 | BMP180センサーをBOSCHの BMP280 にアップグレード | 2016年9月 |
仕様
- I2C Groveインターフェース(GND、VCC、SDA、SCLを含む)
- MPU-9250のI2Cアドレス選択可能
- 低消費電力
- すべてのレジスタとの通信に400kHzの高速モードI2Cを使用
- ユーザーがプログラム可能なフルスケール範囲(±250、±500、±1000、±2000°/秒)を持つデジタル出力X軸、Y軸、Z軸角速度センサー(ジャイロスコープ)
- プログラム可能なフルスケール範囲(±2g、±4g、±8g、±16g)を持つデジタル出力3軸加速度計
- フルスケール範囲(±4800uT)を持つデジタル出力磁力計
- 範囲300〜1100hPa(海抜+9000m〜-500mに相当)のデジタル出力気圧計
- 寸法:25.43mm x 20.35mm
- I2Cアドレス:デフォルトではI2Cセレクトパッドのaとbが接続されている場合は0x68、bとcが接続されている場合は0x69
複数のI2Cデバイスを使用したい場合は、[Software I2C](https://wiki.seeedstudio.com/ja/Arduino_Software_I2C_user_guide/)を参照してください。
Groveモジュールの詳細については、[Grove System](https://wiki.seeedstudio.com/ja/Grove_System/)を参照してください。
対応プラットフォーム
| Arduino | Raspberry Pi |
|---|---|
|
|
上記で対応プラットフォームとして挙げられているものは、モジュールのソフトウェアまたは理論的な互換性を示しています。ほとんどの場合、Arduinoプラットフォーム用のソフトウェアライブラリやコード例のみを提供しています。すべての可能なMCUプラットフォームに対してソフトウェアライブラリやデモコードを提供することはできません。そのため、ユーザー自身でソフトウェアライブラリを作成する必要があります。
ハードウェア概要
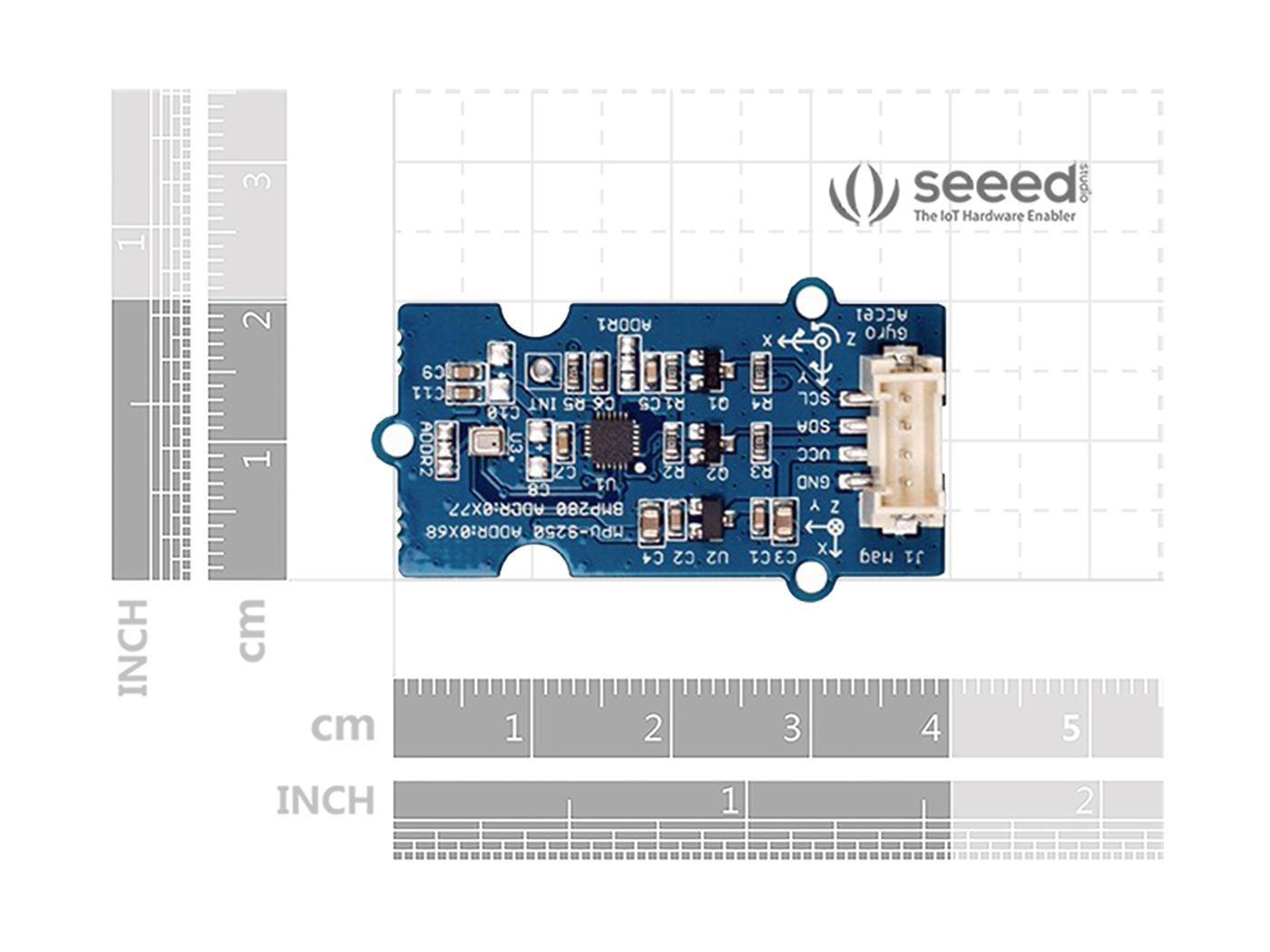
MPU-9250 のI2Cアドレス選択パッド:デフォルトでは a と b が接続されており、アドレスは0x68です。b と c を接続するとアドレスは0x69になります。
MPU-9250 の割り込みピン:割り込みは設定する必要があります。利用可能な割り込みソースは以下の通りです:モーション検出、FIFOオーバーフロー、データ準備完了、I2Cマスターエラー。
軸の方向: 以下の図は、感度軸の方向と回転の極性を示しています。

BMP280 は、モバイルアプリケーション向けに特別に設計された絶対気圧センサーです。このセンサーモジュールは、2.0 × 2.5 mm²のフットプリントと0.95 mmのパッケージ高さを持つ、非常にコンパクトな8ピン金属蓋付きLGAパッケージに収められています。その小型サイズと、1Hzで2.7 μAという低消費電力により、携帯電話、GPSモジュール、時計などのバッテリー駆動デバイスへの実装が可能です。
はじめに
Arduinoで遊ぶ
ハードウェア
- ステップ 1. 以下のものを準備してください:
| Seeeduino V4.2 | ベースシールド | Grove - IMU 10DOF v2.0 |
|---|---|---|
|
|
|
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |



- ステップ 2. Grove - IMU 10DOF v2.0 をベースシールドの I2C ポートに接続します。
- ステップ 3. Grove - ベースシールドを Seeeduino に差し込みます。
- ステップ 4. USBケーブルを使用して Seeeduino をPCに接続します。

ソフトウェア
- ステップ 1. Grove-IMU_10DOF_v2 ライブラリをダウンロードします。
- ステップ 2. Arduinoライブラリのインストール方法に従ってライブラリをインストールしてください。
- ステップ 3. Arduino IDEを再起動します。次のパスから「IMM_10DOF_Test」例を開きます:File -> Example -> GROVE_IMU_10DOF_V2-master -> IMU_10DOF_V2_Test。

- ステップ 4. コードをアップロードします。正しいボードタイプとCOMポートを選択する必要があることに注意してください。 以下のように表示されます:

リソース
- [Eagle] Grove - IMU 10DOF v2 Eagleファイル
- [ライブラリ] GitHubからライブラリを取得
- [データシート] BMP280 データシート
- [データシート] MPU-9250 データシート
プロジェクト
Motorcycle Data App: プロのようにライドから学びましょう!オートバイのレースチームは長年にわたりIMUデータを活用してきましたが、RideData+Arduinoを使えば、あなたも同じことが簡単にできます。
技術サポートと製品ディスカッション
弊社の製品をお選びいただきありがとうございます!製品をご利用いただく際に、できるだけスムーズな体験をしていただけるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、いくつかのコミュニケーションチャネルをご用意しています。