モーターシールド V1.0
この文書は AI によって翻訳されています。内容に不正確な点や改善すべき点がございましたら、文書下部のコメント欄または以下の Issue ページにてご報告ください。
https://github.com/Seeed-Studio/wiki-documents/issues
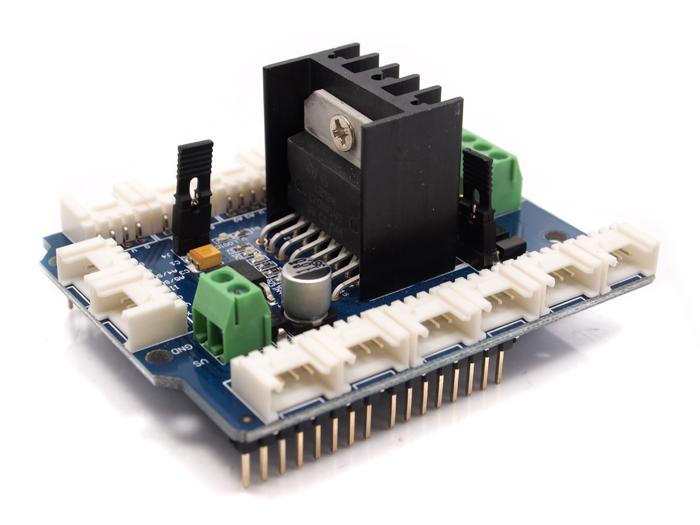
モーターシールドは、ロボティクスや機械的なアプリケーションに最適なプラットフォームです。Arduinoを使用して、2つのブラシ付きDCモーターまたは1つの4線式2相ステッピングモーターを駆動することができます。HブリッジドライバーチップL298NモータードライバーICをベースにしており、モーターを駆動するために6Vから15Vの電源が必要です。また、Arduino本体を駆動するためのオンボード5V電圧レギュレーターも含まれています。さらに、13個のオンボードGroveコネクタを使用して、プラグアンドプレイのGroveセンサーを接続することができます。
モデル: SLD80256P
特徴
標準Arduino互換
パルス幅変調(PWM)速度制御モード
4方向インジケータライト
Groveプラグアンドプレイセンサー対応
大型ヒートシンクで大きな負荷に対応
最大14個のサーボをサポート
注意:
ドライバICおよびヒートシンクは、1000mA以上の電流で動作する場合、非常に高温になる可能性があります。
仕様
| 項目 | 最小 | 標準 | 最大 | 単位 |
|---|---|---|---|---|
| ロジック制御電圧 | 4.5 | 5 | 5.5 | V |
| モーター供給電圧 | 6 | / | 15 | V |
| 出力電圧 | 0 | / | 入力電圧 -1 | V |
| 各チャンネルの出力電流 | / | / | 2000 | mA |
| 出力デューティ範囲 | 0%~100% | / | ||
| 寸法 | 68.5x54.5x29.5 | mm | ||
| 正味重量 | 37 | g |
- 推奨最大デューティ <50%(フルロード時)
インターフェース機能
 外部電源ジャック: モーターシールド用の外部電源供給。
外部電源ジャック: モーターシールド用の外部電源供給。
モーターインターフェース: Out 1とOut 2(Out 3とOut 4)は、DCモーターA(B)を接続可能。
モーターA有効化コネクタ: DCモーターAを駆動する際に、ジャンパーキャップで上記2つのインターフェースを接続。
モーターB有効化コネクタ: DCモーターBを駆動する際に、ジャンパーキャップで下記2つのインターフェースを接続。
電源選択コネクタ: USBまたは外部電源でモーターを駆動可能。ジャンパーキャップを使用してコネクタを接続すると、USB電源がモーターシールドに供給されます。
以下の表は、モーターA/BのインジケータLEDを説明しています。
| インジケータ | 説明 |
|---|---|
| IN1_red | モーターAが時計回りに回転すると点灯し、out1ピンが高レベルを出力 |
| IN2_green | モーターAが反時計回りに回転すると点灯し、out2ピンが高レベルを出力 |
| IN3_red | モーターBが時計回りに回転すると点灯し、out3ピンが高レベルを出力 |
| IN4_green | モーターBが反時計回りに回転すると点灯し、out4ピンが高レベルを出力 |
| ピン名 | 方向 | Arduinoへの接続 | 説明 |
|---|---|---|---|
| VCC | / | VCC | 電源選択用 |
| VS, GND | / | / | モーター用電源、6V - 15V |
| EA | 入力 | D9 | ブリッジAのTTL互換有効入力 |
| EB | 入力 | D10 | ブリッジBのTTL互換有効入力 |
| IN1 | 入力 | D8 | ブリッジAのTTL互換入力 |
| IN2 | 入力 | D11 | ブリッジAのTTL互換入力 |
| IN3 | 入力 | D12 | ブリッジBのTTL互換入力 |
| IN4 | 入力 | D13 | ブリッジBのTTL互換入力 |
| M1-, M1+ | 出力 | / | ブリッジAの出力 |
| M2-, M2+ | 出力 | / | ブリッジBの出力 |
使用方法
ハードウェアのインストール
DCモーターをモーターシールドの出力ピン M1+ & M1- (M2+ & M2-) に接続します。4線式ステッピングモーターを使用する場合は、4つのピンが正しく接続されていることを確認してください。駆動電圧(必要な電圧は使用するモーターによります。モーターのデータシートを参照してください)を電源端子に接続します。

ジャンパー J4 を挿入すると、Arduino はオンボードの電圧レギュレーターを介して駆動電圧から電源供給を受けることができます。このレギュレーターは駆動電圧を5Vに変換します。
ソフトウェア
Motor shield Demo code をダウンロードし、Motor_shield_demo_code スケッチを開きます。tools-boards で対応するArduinoボードを選択し、tools-serial port でシリアルポートを選択します。
 スケッチをArduinoボードにアップロードすると、2つのモーターが動作を開始します。モーターシールドを電源端子経由で電源供給し、ジャンパー J4 が挿入されている場合は、USBケーブルを取り外すことができます。
スケッチをArduinoボードにアップロードすると、2つのモーターが動作を開始します。モーターシールドを電源端子経由で電源供給し、ジャンパー J4 が挿入されている場合は、USBケーブルを取り外すことができます。
速度制御は、ArduinoのPWM出力 D9(EA) および D10(EB) から得られる従来のPWMを使用して実現されます。analogWrite() 関数を使用して駆動PWMを生成します:
int speedpinA=9;//モーターAを有効化
int speedpinB=10;//モーターBを有効化
int speed =127;//モーターの速度を定義
......
analogWrite(speedpinA,speed);//AnalogWriteを使用してPWMを生成し、モーター速度を制御
analogWrite(speedpinB,speed);
また、デジタル D8(IN1) と D11(IN2) を設定して OUT1/2 に接続されたモーターを制御し、デジタル D12(IN3) と D13(IN4) を設定して OUT3/4 に接続されたモーターを制御します。
int pinI1=8;//I1インターフェースを定義
int pinI2=11;//I2インターフェースを定義
......
digitalWrite(pinI2,HIGH);//DCモーターAを時計回りに回転
digitalWrite(pinI1,LOW);
以下は EA(B) と INx の論理とモーターの動作の対応表です:
| EA(B) | IN1(IN3) | IN2(IN4) | モーターA(B)の動作 |
|---|---|---|---|
| 0 | x | x | 停止 |
| 1 | 0 | 0 | 停止 |
| 1 | 0 | 1 | 時計回り |
| 1 | 1 | 0 | 反時計回り |
| 1 | 1 | 1 | 停止 |
/*
SEEED Studio ステッピングモーター制御 - 1回転
SEEED STUDIO モーターシールド用に Stepper の例を適応。
このプログラムは、Arduino に含まれる Stepper ライブラリを使用して
ユニポーラまたはバイポーラステッピングモーターを駆動します。
モーターは Seeed Studio モーターシールドと Arduino に接続されています。
デジタルピン 8,11,12,13 は L298N を駆動し、ステッパーオブジェクトを作成する際に使用されます。
デジタルピン 9 と 10 はチップを有効にするために HIGH にする必要があります。
モーターは1方向に1回転し、その後逆方向に1回転します。
作成日: 2007年3月11日
修正日: 2009年11月30日
作成者: Tom Igoe
修正日: 2012年7月4日
修正者: R. Dumouchelle
*/
#include <Stepper.h>
const int stepsPerRevolution = 200; // モーターの1回転あたりのステップ数に合わせて変更
// ステッピングモーター用
// ピン8から11を使用してステッパーライブラリを初期化
Stepper myStepper(stepsPerRevolution, 8,11,12,13);
void setup() {
// 速度を60rpmに設定
myStepper.setSpeed(60);
// シリアルポートを初期化
Serial.begin(9600);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
digitalWrite(9,HIGH);
digitalWrite(10,HIGH);
}
void loop() {
// 1方向に1回転
Serial.println("時計回り");
myStepper.step(stepsPerRevolution);
delay(500);
// 逆方向に1回転
Serial.println("反時計回り");
myStepper.step(-stepsPerRevolution);
delay(500);
}
バージョントラッカー
| リビジョン | 説明 | リリース日 |
|---|---|---|
| v1.0 | V1.0 リリース | 2012/3/29 |
関連プロジェクト
モーターシールド V2.0 デモ

これは、Seeedstudio 2.0 モーターシールドを使用してモーターを個別に制御する方法に関するレシピです。
回路図オンラインビューア
リソース
- [データシート] L298データシート
- [EAGLE] モーターシールド EAGLE ファイル
- [PDF] モータードライバ PCB
- [PDF] モータードライバ回路図
- [コード] モーターシールド デモコード
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品の使用体験がスムーズになるよう、さまざまなサポートを提供しています。お客様の好みやニーズに応じた複数のコミュニケーションチャネルをご用意しています。